


 software
softwareSimilar presentations:










Комп’ютерне моделювання процесу дорожнього руху
1.
Тема: КОМП’ЮТЕРНЕ МОДЕЛЮВАННЯПРОЦЕСУ ДОРОЖНЬОГО РУХУ
Роботу виконав:
Можвило Владислав Анатолійович,
учень 11 класу
НВО – ліцею НІТ
1
2.
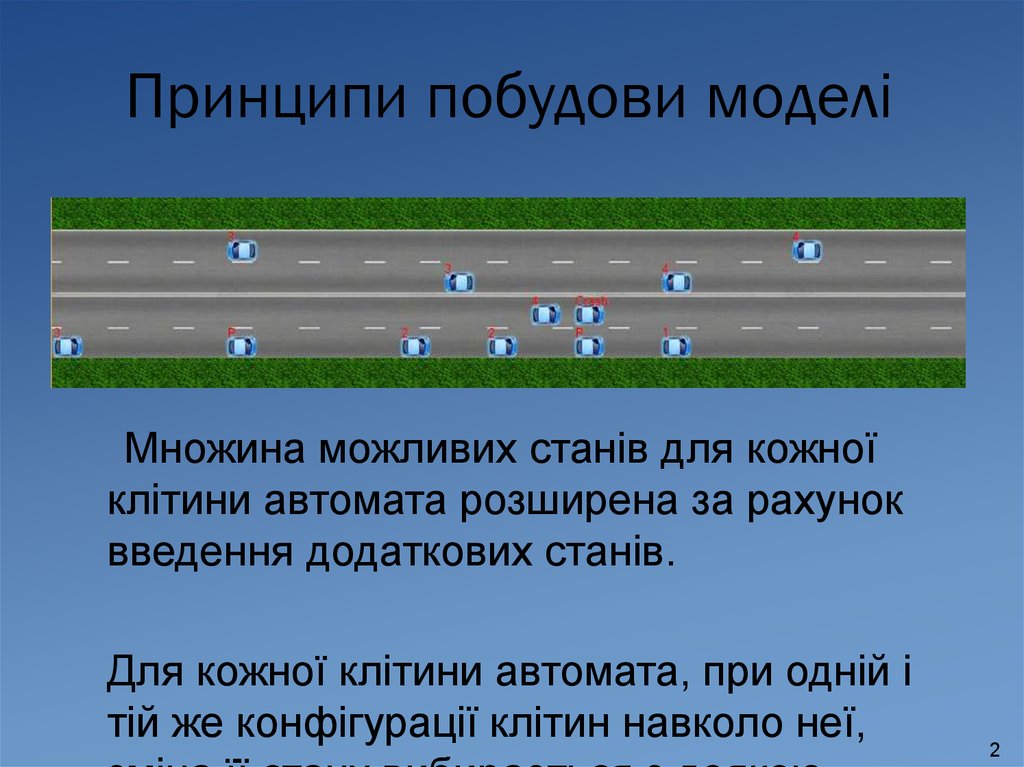
Принципи побудови моделіМножина можливих станів для кожної
клітини автомата розширена за рахунок
введення додаткових станів.
Для кожної клітини автомата, при одній і
тій же конфігурації клітин навколо неї,
2
3.
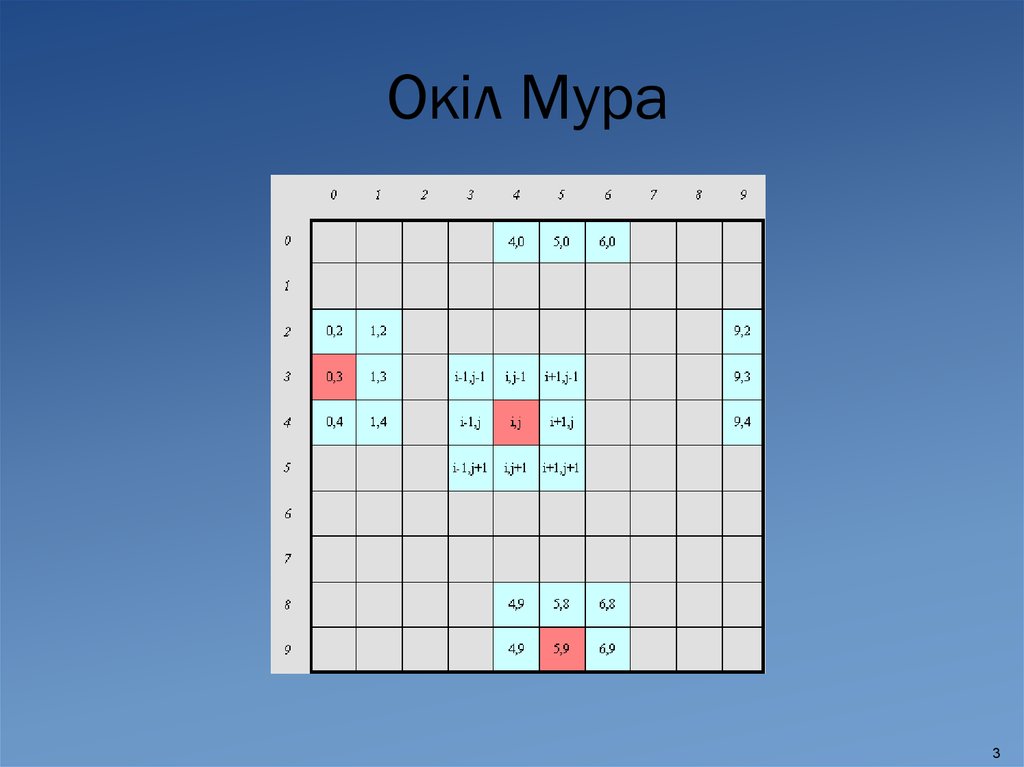
Окіл Мура3
4.
Властивості класичногоклітинного автомату
Локальність правил
Однорідність системи
Кінцева безліч можливих станів
клітини
Одночасний перехід у новий стан для
всіх клітин
4
5.
Модель дорожнього полотнаA : (( x, y ), s, t )
F : S[n m] S [n m]
5
6.
Можливі стани клітини взапропонованій моделі:
0 - ділянка дорожнього полотна, що
відповідає даній клітині, вільна;
1,2,3,4 - ділянка дорожнього полотна, що
відповідає даній клітині, зайнята
автомобілем, який переміщується по
автомагістралі. Цифра відповідає
швидкості автомобіля.
(-1) – псевдостан.
(-2) – ділянка дорожнього полотна, що
відповідає даній клітині, зайнята
припаркованим автомобілем.
6
7.
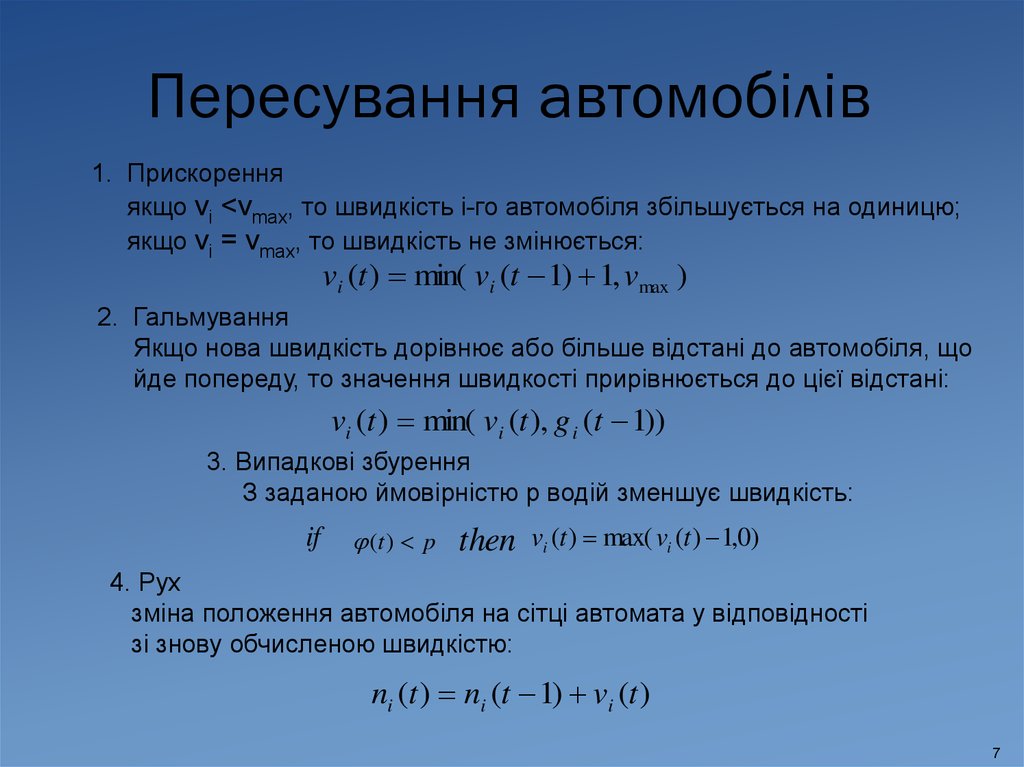
Пересування автомобілів1. Прискорення
якщо vi <vmax, то швидкість i-го автомобіля збільшується на одиницю;
якщо vi = vmax, то швидкість не змінюється:
vi (t ) min( vi (t 1) 1, vmax )
2. Гальмування
Якщо нова швидкість дорівнює або більше відстані до автомобіля, що
йде попереду, то значення швидкості прирівнюється до цієї відстані:
vi (t ) min( vi (t ), g i (t 1))
3. Випадкові збурення
З заданою ймовірністю p водій зменшує швидкість:
if
(t ) p
then
vi (t ) max( vi (t ) 1,0)
4. Рух
зміна положення автомобіля на сітці автомата у відповідності
зі знову обчисленою швидкістю:
ni (t ) ni (t 1) vi (t )
7
8.
Зміна полоси1. Визначення необхідності зміни полоси:
vi (t ) vi g (t )
then
CRN true
2.Визначення можливості зміни полоси:
g op (t ) vi (t ) and g b (t ) vmax (t ) then
g op (t ) vi (t ) and
g b (t ) 2
then
CRC true
CRC true
3. Ймовірність зміни полоси
if (t ) p
then CRP true
зміна полоси відбувається якщо всі показники: CRN, CRC, CRP
приймають значення true.
8
9.
910.
1011.
1112.
1213.
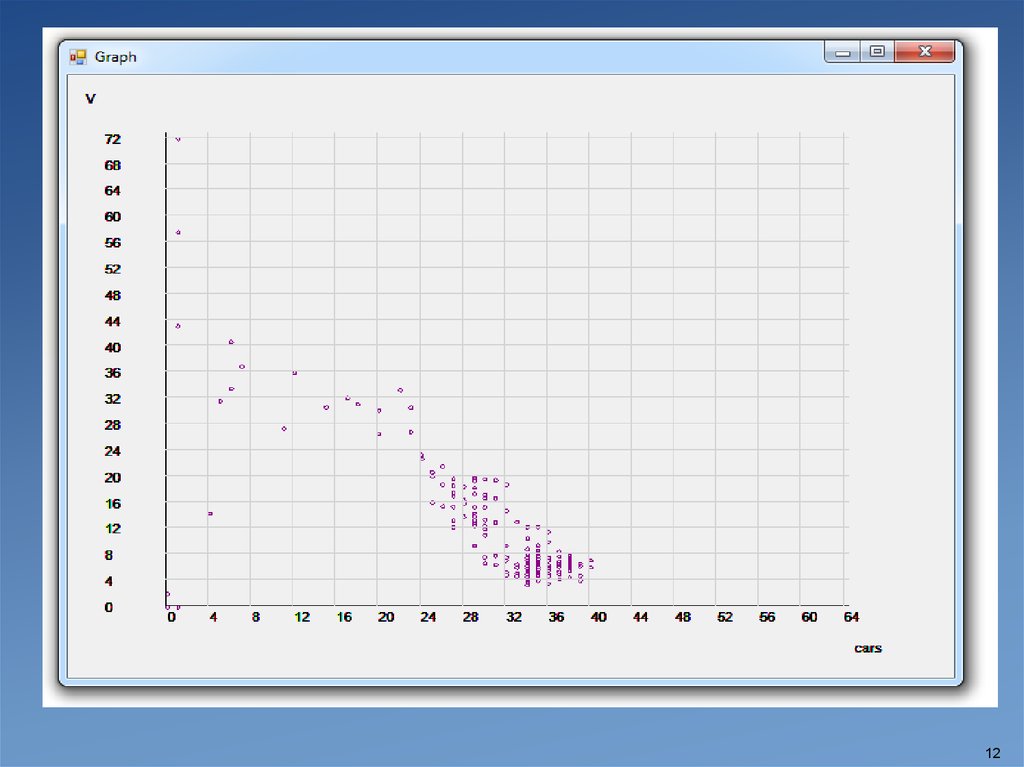
ВисновкиУ даній роботі проведені дослідження, які
дозволяють дати відповіді на ряд питань:
Яким чином середня швидкість руху по
автомагістралі залежить від концентрації
автомобілів на ній?
В якій мірі паркування у правому ряду
зменшує середню швидкість руху на
дорозі?
Які заходи треба вжити, щоб покращити
якість руху?
13