






 mechanics
mechanicsSimilar presentations:










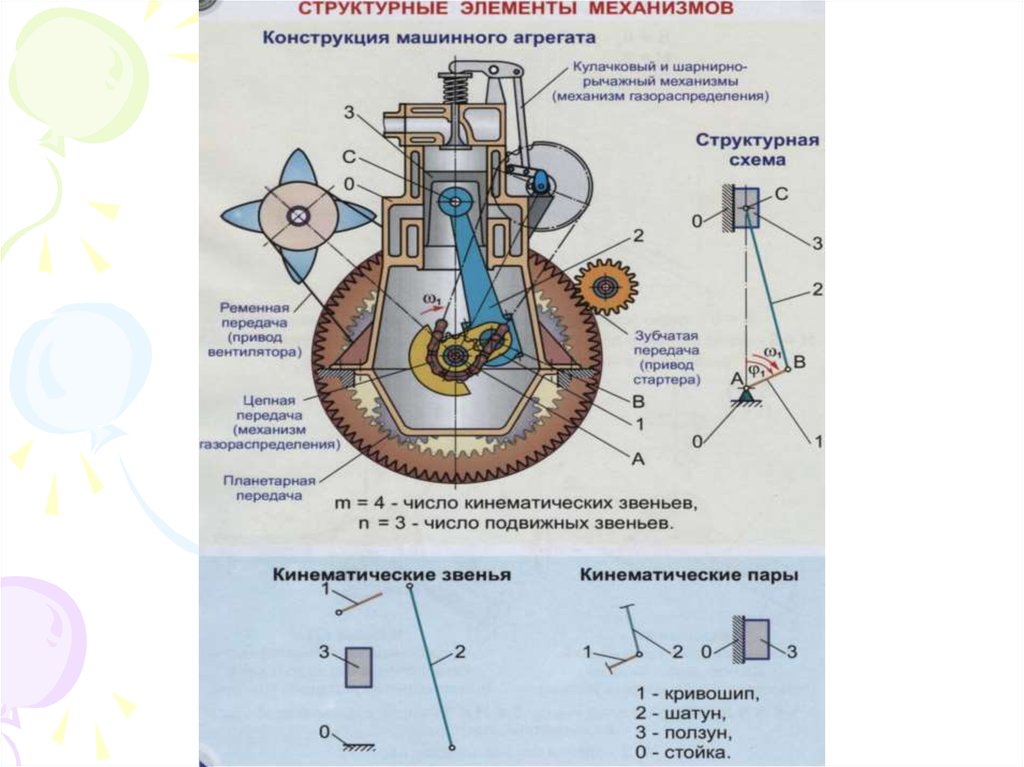
Структурные элементы механизмов
1.
2. Краткие теоретические сведения
• Звено - одно или несколькосоединенных твердых тел
• Ведущее – звено, значение
которого задается углом
поворота
• Ведомые – звенья,
положение которых зависит
от ведущих звеньев
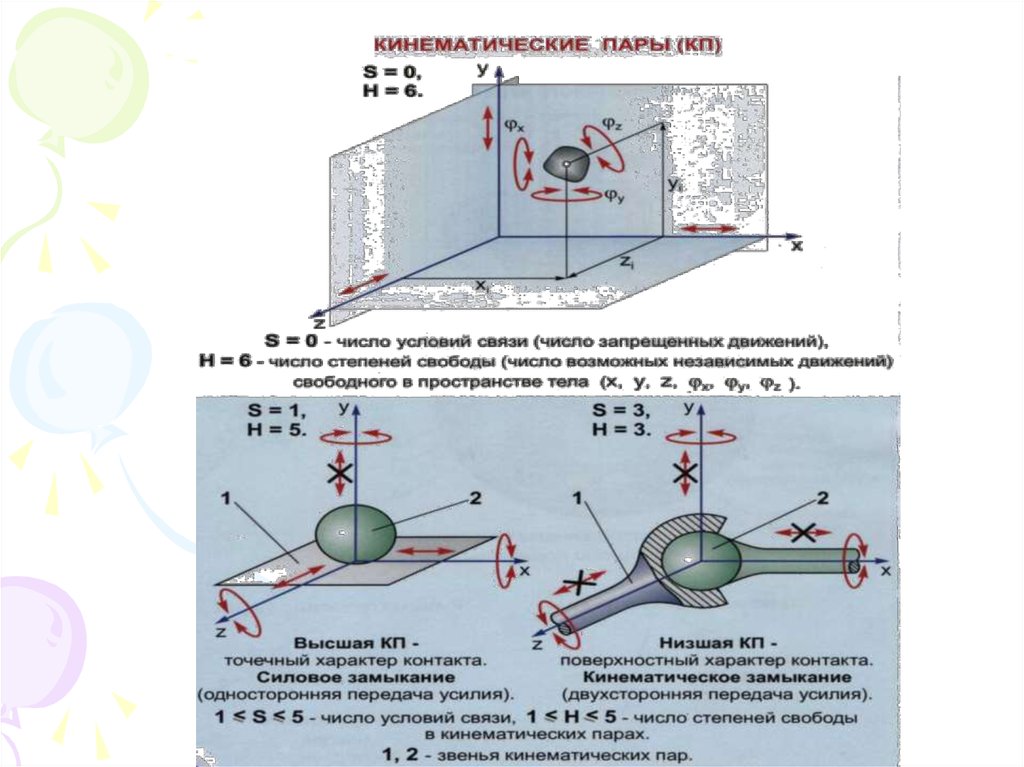
• Кинематическая пара –
соединение двух
сопряженных звеньев,
имеющих относительные
движения между собой
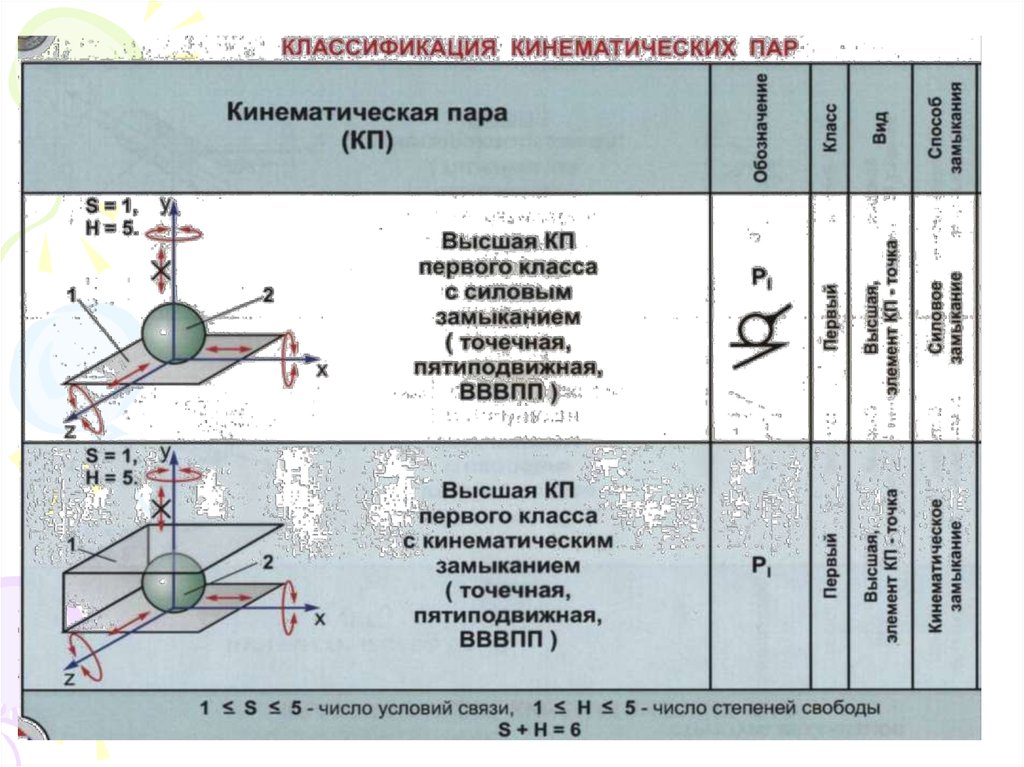
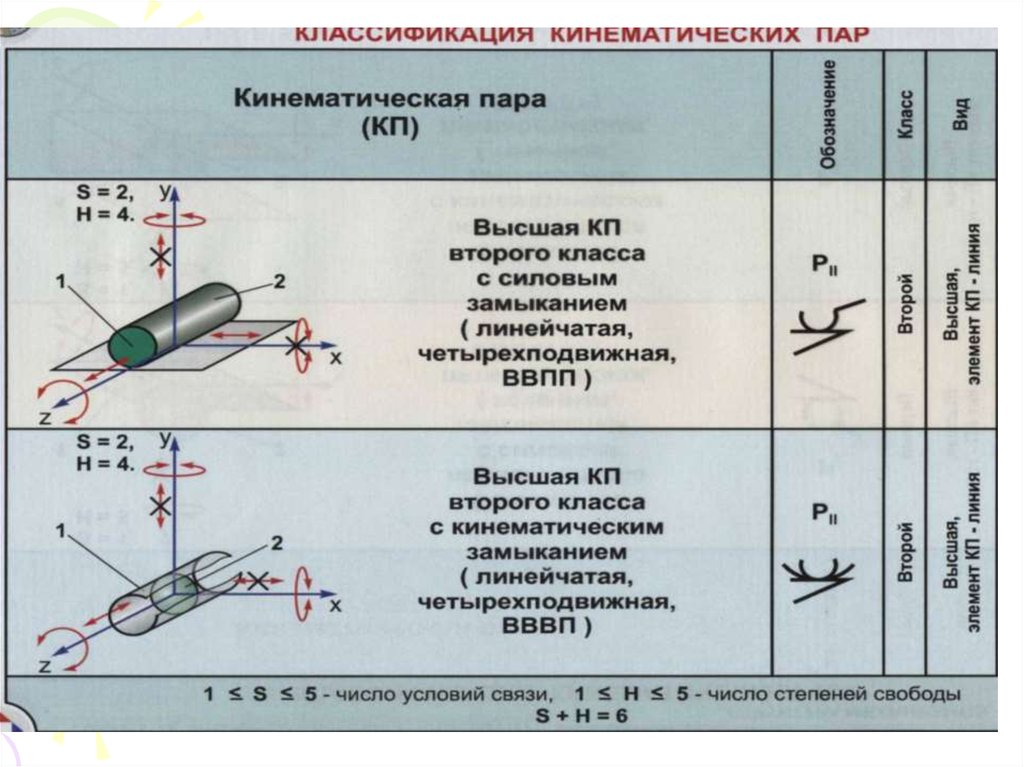
• Высшая кинематическая
пара – имеющая
соприкосновение по точке
или линии
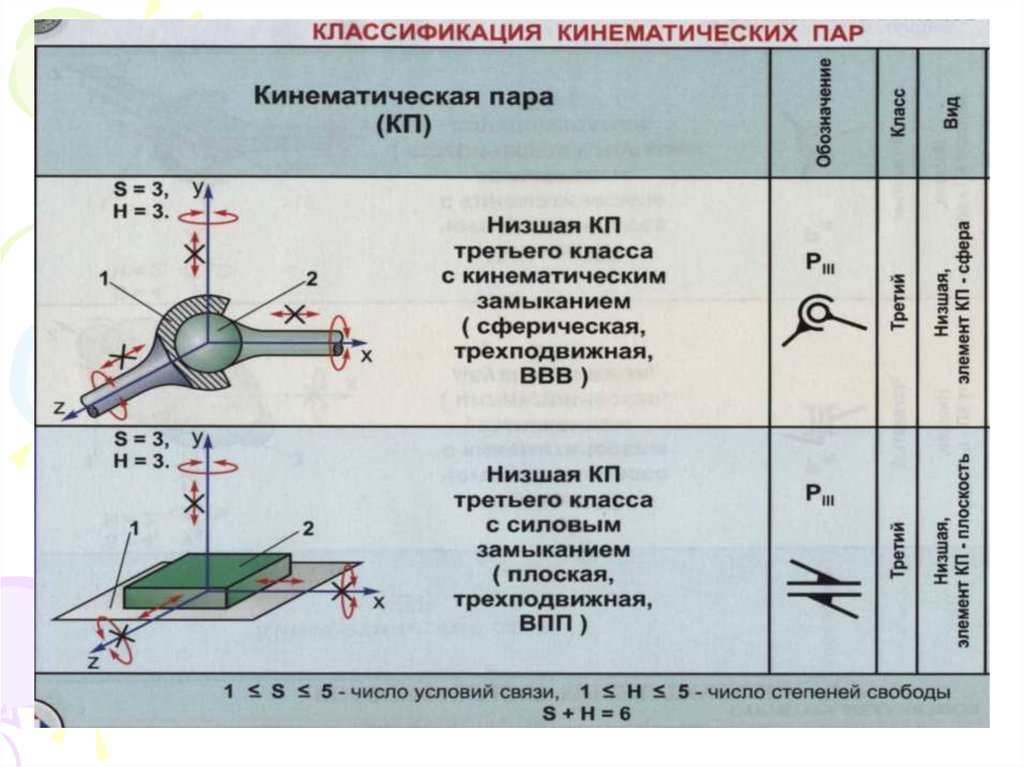
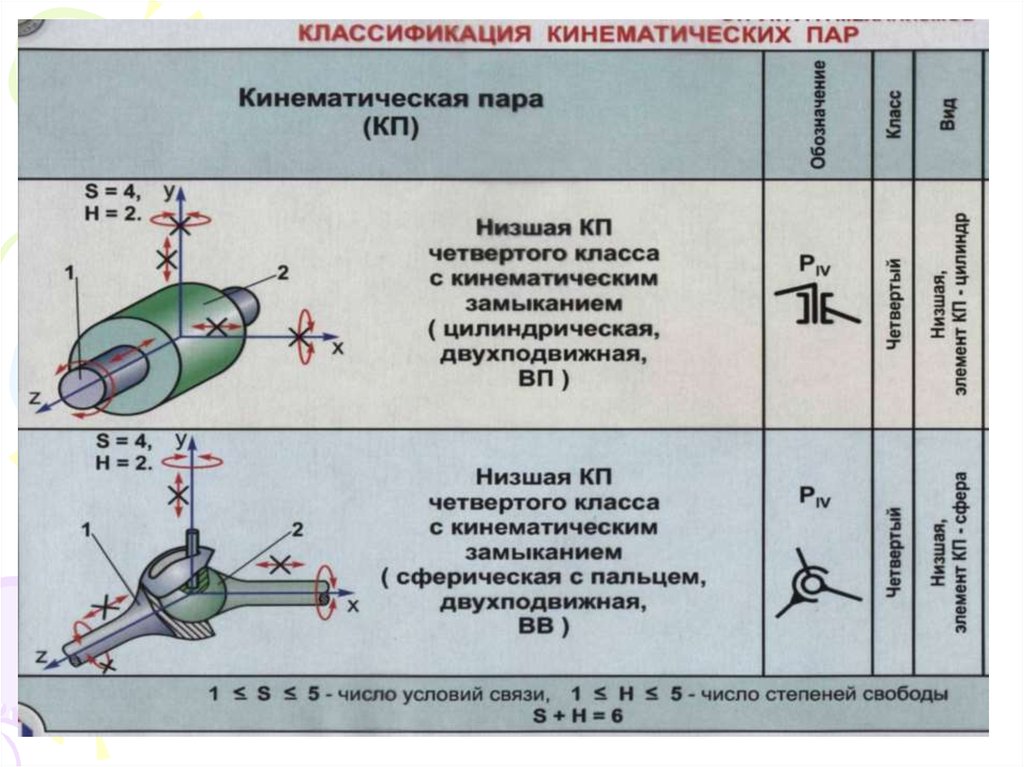
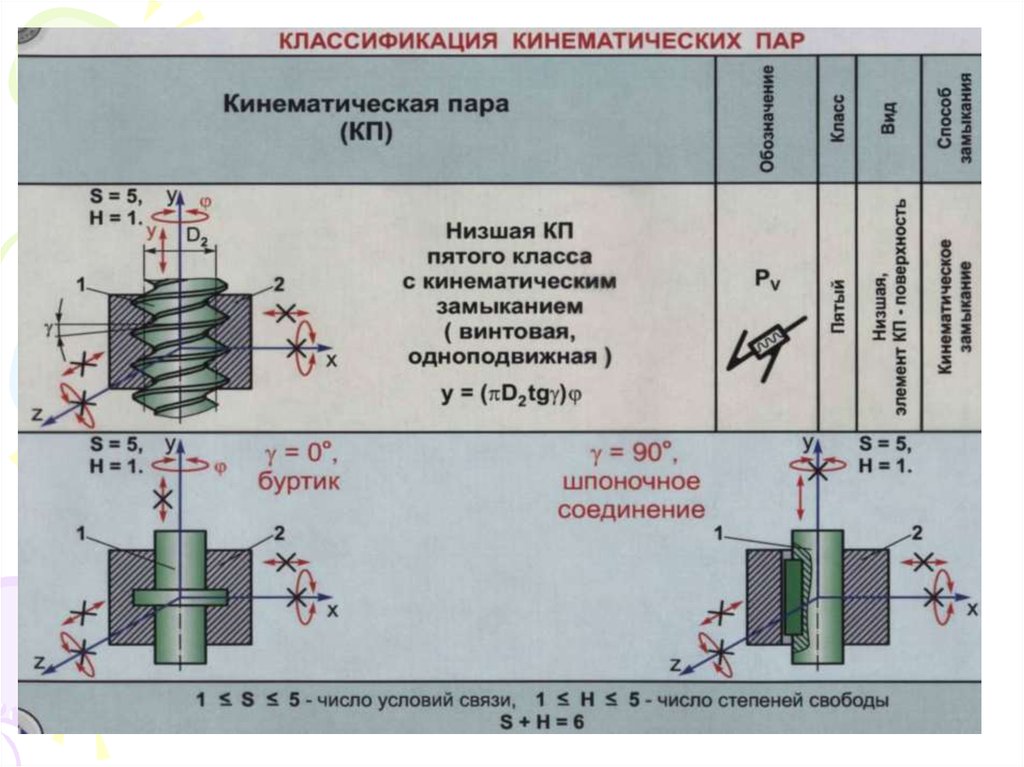
• Низшая кинематическая
пара – имеющая касание по
площади
• Кинематическая цепь –
система звеньев, связанных
между собой
• Механизмы являются
частными случаями
кинематических цепей
• Плоская механизмы – точки
которых описывают
траектории в одной
плоскости
3.
4.
5.
Основные понятия и определения.
Теория механизмов и машин занимается исследованием и разработкой
высокопроизводительных механизмов и машин.
Механизм – совокупность подвижных материальных тел, одно из
которых закреплено, а все остальные совершают вполне
определенные движения, относительно неподвижного материального
тела.
Звенья – материальные тела, из которых состоит механизм.
Стойка– неподвижное звено.
Звено, к которому изначально сообщается движение, называется
входным (начальным, ведущим). Звено, совершающее движение, для
выполнения которого предназначен механизм – выходное звено.
Если это компрессор, то зв.1 – входное, а зв.3 – выходное.
Если это механизм ДВС, то зв.3 – входное, а зв.1 – выходное.
Кинематическая пара – подвижное соединение звеньев,
допускающее их относительное движение.
Порядок нумерации звеньев: входное звено – 1;стойка – последний
номер.
Звенья бывают: простые – состоят из одной детали;
сложные – состоят из нескольких, жестко скрепленных друг с
другом и совершающих одно и тоже движение.
Например, шатунная группа механизма ДВС.
Звенья, соединяясь друг с другом, образуют кинематические цепи,
которые разделяют на: простые и сложные; замкнутые и
разомкнутые;
Машина – техническое устройство, в результате осуществления
технологического процесса определенного рода, можно
автоматизировать или механизировать труд человека.
6.
7.
8.
9.
10.
11.
12.
13. Схема кривошипно-шатунного механизма
Этот механизмиспользуется для
преобразования
вращательного
движения кривошипа
1 в поступательное
движение ползуна 3.
Ползун и кривошип
соединяются с
помощью шатуна 2,
совершающего
плоское сложное
движение, 4 – это
неподвижное звено
(стойка)
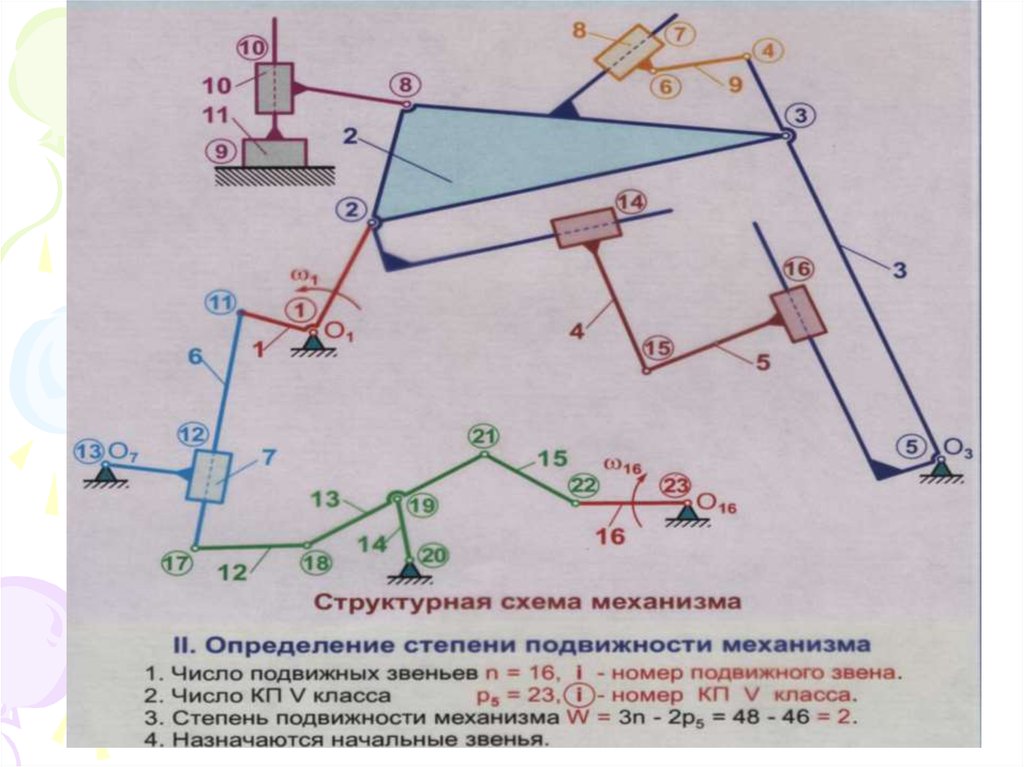
14. Формула Чебышева
Одной из основных задач кинематическогоанализа является определение числа степеней
свободы механизма. Чебышев при
проектировании машин и механизмов вывел
зависимость числа степеней свободы для
плоских механизмов:
W = 3(N-1)-2P1-P2,
Где
N – число звеньев, включающих неподвижное
звено.
• P1 – количество низших кинематических пар.
• P2 – количество высших кинематических пар.
15. Определим число степеней свободы кривошипно – шатунного механизма
По формуле Чебышева:• W = 3(4-1)-2·4-0 =1.
Здесь N = 4
(1-кривошип, 2-шатун,
3-ползун, 4-опора);
P1 =4 (1-2); (2-3); (3-4); (4-1),
P2 = 0.