
















 mechanics
mechanicsSimilar presentations:






")


")
Структурная схема механизма
1. ЛЕКЦИЯ 2
Краткое содержание:Структурная схема механизма;
Кинематическая схема механизма;
Степень подвижности механизма;
Структурный принцип образования механизмов;
Начальный механизм;
Группы Ассура;
Структурный анализ рычажного механизма.
2. Структурная схема механизма – это безмасштабное графическое изображение механизма с применением условных обозначений звеньев и
кинематических пар.3.
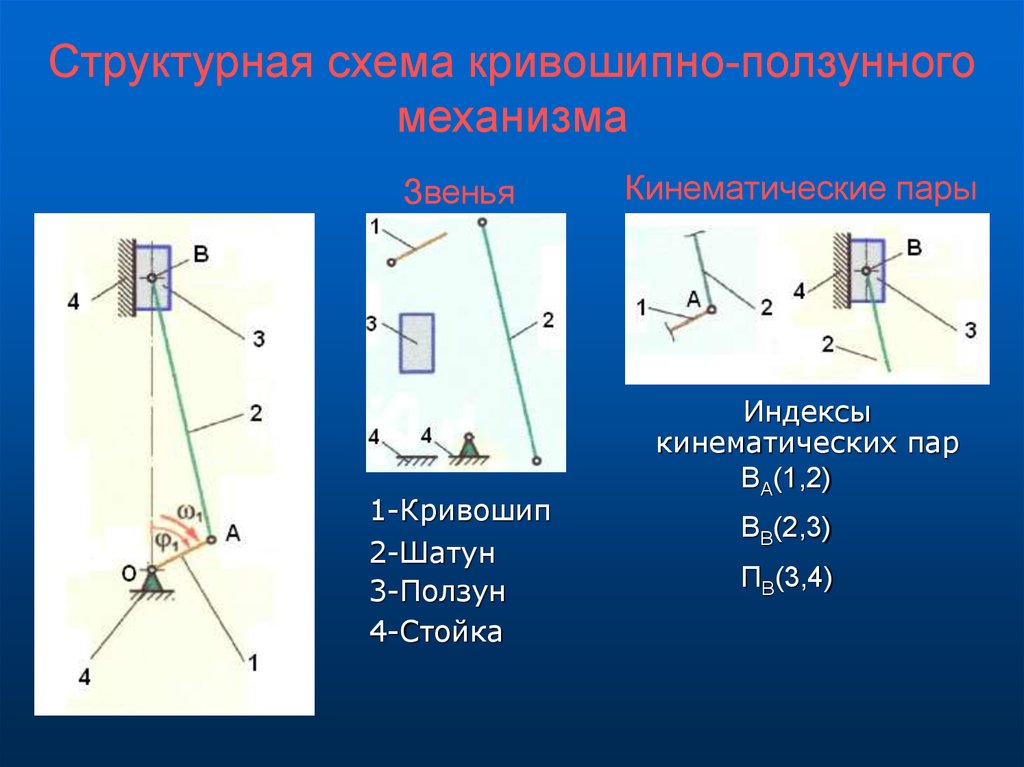
Структурная схема кривошипно-ползунногомеханизма
Звенья
1-Кривошип
2-Шатун
3-Ползун
4-Стойка
Кинематические пары
Индексы
кинематических пар
BА(1,2)
BB(2,3)
ПB(3,4)
4.
Кинематическая схема механизма – этоструктурная, схема выполненная в масштабе.
5.
Степень подвижности механизма W - этоколичество независимых движений, которые
нужно подвести к механизму, чтобы на
выходе получить одно или наоборот.
6.
Для плоских механизмов степень подвижностиопределяется по формуле П. Л. Чебышева:
W = 3n - 2p1 - p2
(2.1)
n – число подвижных звеньев механизма;
p1 – число одноподвижных кинематических пар;
p2 – число двухподвижных кинематических пар.
7.
В пространственных механизмах степеньподвижности определяется по формуле О. И.
Сомова - А. И. Малышева:
W = 6n - 5p1 - 4p2 - 3p3 - 2p4 - p5
(2.2)
n – число подвижных звеньев механизма;
p1 – число одноподвижных кинематических пар;
p2 – число двухподвижных кинематических пар;
p3 – число трёхподвижных кинематических пар;
p4 – число четырёхподвижных кинематическх пар;
p5 – число пятиподвижных кинематическх пар.
8. Структурный принцип образования механизмов
ЛеонидВладимирович
Ассур
(1878
–
1920)
профессор
Петербургского
политехнического
института.
Любой
механизм
образуется
последовательным присоединением
к ведущему звену и стойке
кинематических
цепей,
удовлетворяющих условию, что
степень их подвижности W=0.
9.
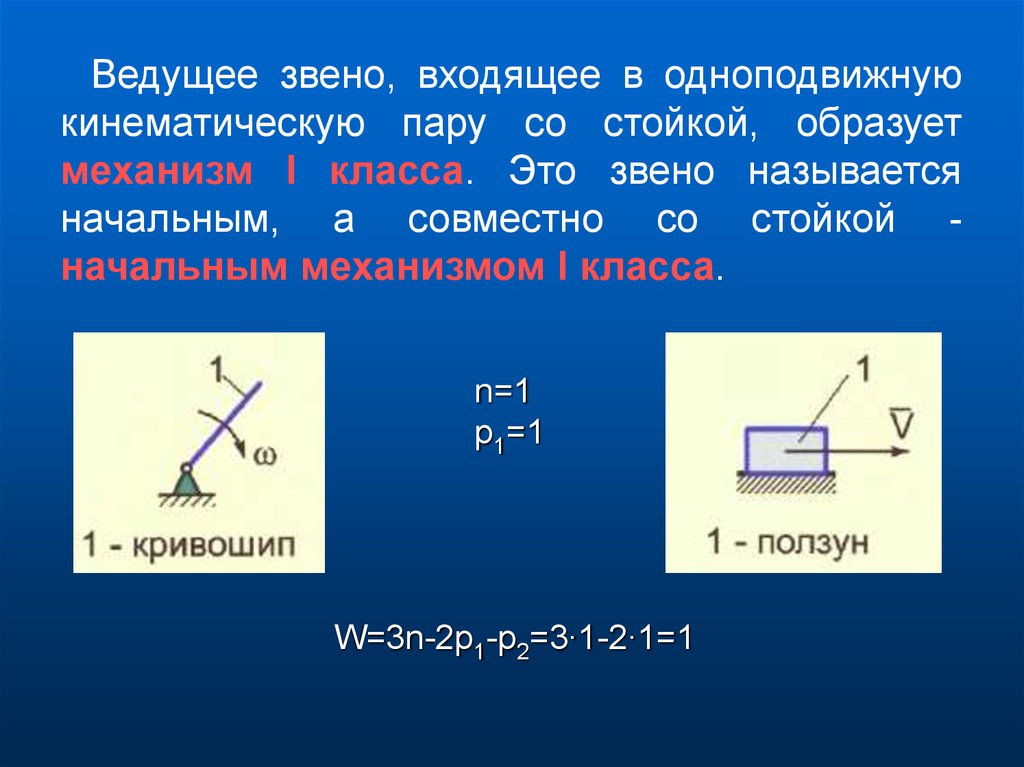
Ведущее звено, входящее в одноподвижнуюкинематическую пару со стойкой, образует
механизм I класса. Это звено называется
начальным, а совместно со стойкой начальным механизмом I класса.
n=1
p1=1
W=3n-2p1-p2=3∙1-2∙1=1
10.
Кинематические цепи, у которых степеньподвижности W=0, называются группами
Ассура.
Свойства группы Ассура
1.
Включает
только
кинематические пары p1
2. W=3n-2p1=0
p1 = 3/2 n
одноподвижные
(2.3)
3. Количество звеньев n – чётное, p1 - кратно 3
n
2
4
6
8
...
p1
3
6
9
12
...
Класс
II
III
IV
V
...
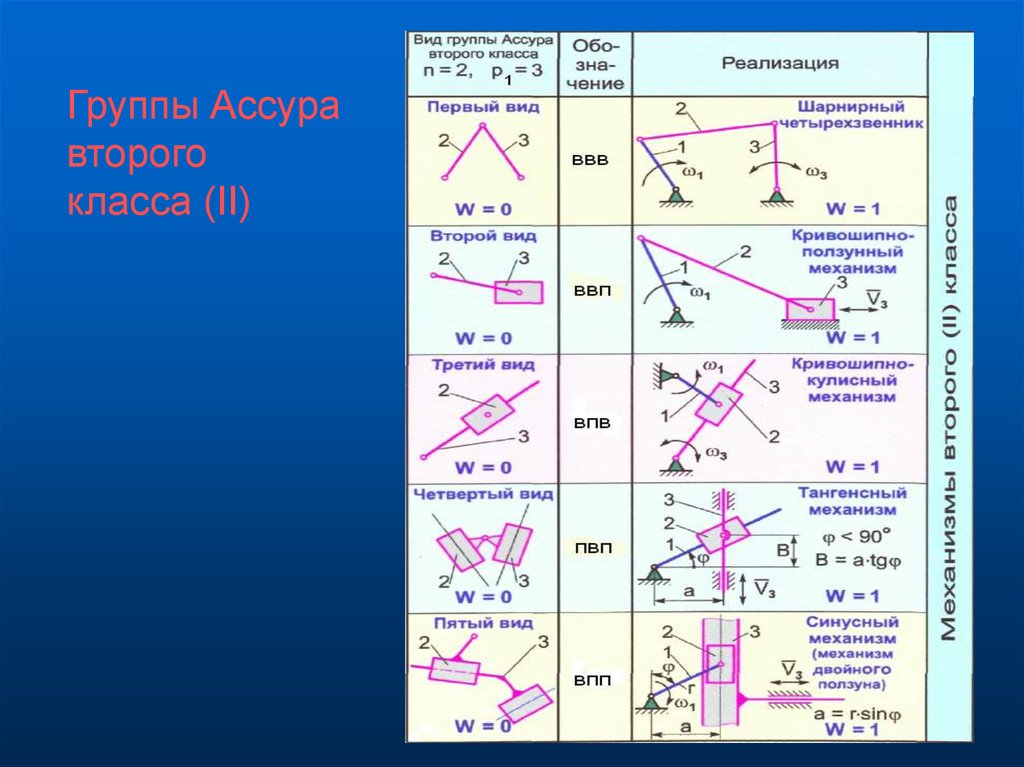
11.
Группы Ассуравторого
класса (II)
12.
Группы АссураIII класса
Группы Ассура
IV класса
13.
Число внешних кинематических пар, которымигруппа Ассура присоединяется к звеньям
механизма, не относящимся к ней, называется
порядком группы Ассура.
Класс механизма определяется наивысшим
классом группы Ассура, которая входит в его
состав.
14. Структурный синтез плоских механизмов
Пример № 1W=1
n=3
p1 = 4
15. Структурный синтез плоских механизмов
Пример № 2W=1
n=3
p1 = 4
16. Структурный синтез плоских механизмов
Пример № 3W=1
n=5
p1 = 7
17. Структурный анализ механизма
Задачейструктурного
анализа
механизма
является определение параметров структуры
заданного механизма:
определение числа звеньев
определение числа и вида кинематических пар
определение степени подвижности механизма
разбиение механизма на группы Ассура и
начальный механизм
• определение класса всего механизма
18. Алгоритм проведения структурного анализа
1. Начертить структурную схему механизма.2. Обозначить все подвижные и неподвижные звенья
механизма, начав с обозначения входного звена–
кривошипа и далее по порядку.
3. Заглавными буквами латинского алфавита обозначить все
кинематические пары.
4. Определить степень подвижности механизма.
5. Отсоединить от механизма наиболее отдаленную от
входного звена группу Ассура II класса (2 звена), так чтобы
оставшийся механизм продолжал работать, а степень его
подвижности W не менялась (оставалась прежней).
6. Продолжать отсоединять от механизма группы Ассура до
тех пор, пока не останется начальный механизм.
7. Записать структурную формулу всего механизма.
8. Определить класс механизма.
19.
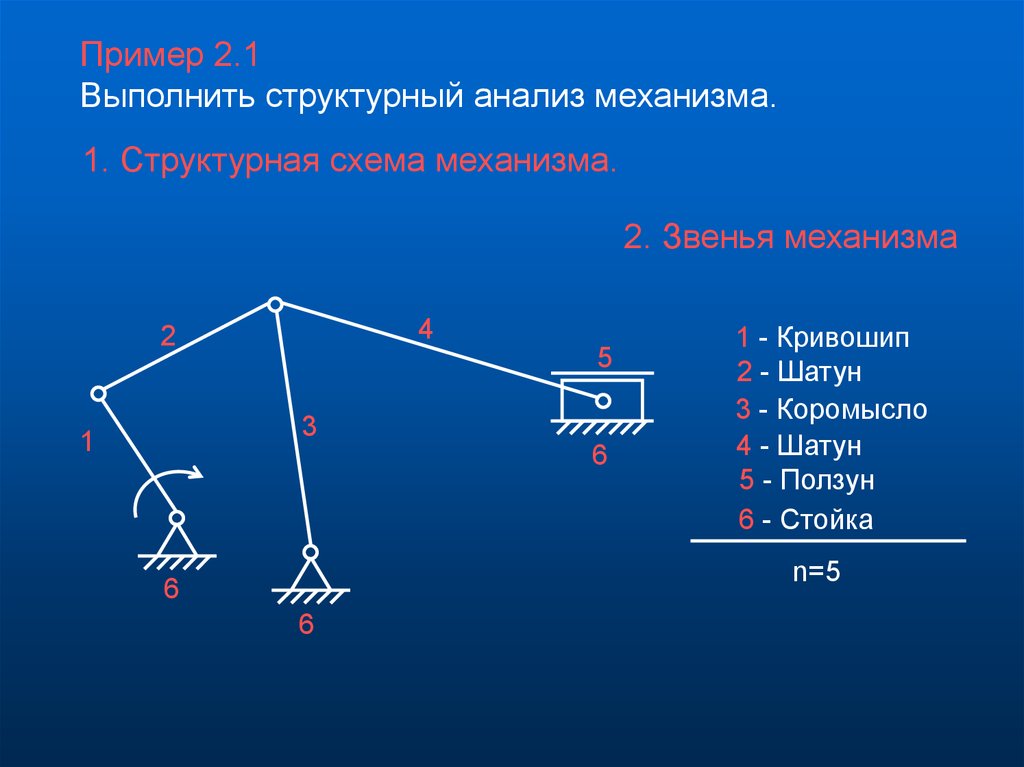
Пример 2.1Выполнить структурный анализ механизма.
1. Структурная схема механизма.
2. Звенья механизма
4
2
5
3
1
6
1 - Кривошип
2 - Шатун
3 - Коромысло
4 - Шатун
5 - Ползун
6 - Стойка
n=5
6
6
20.
3. Кинематические парыB
4
2
5
A
C
3
1
6
O1
6
O2
6
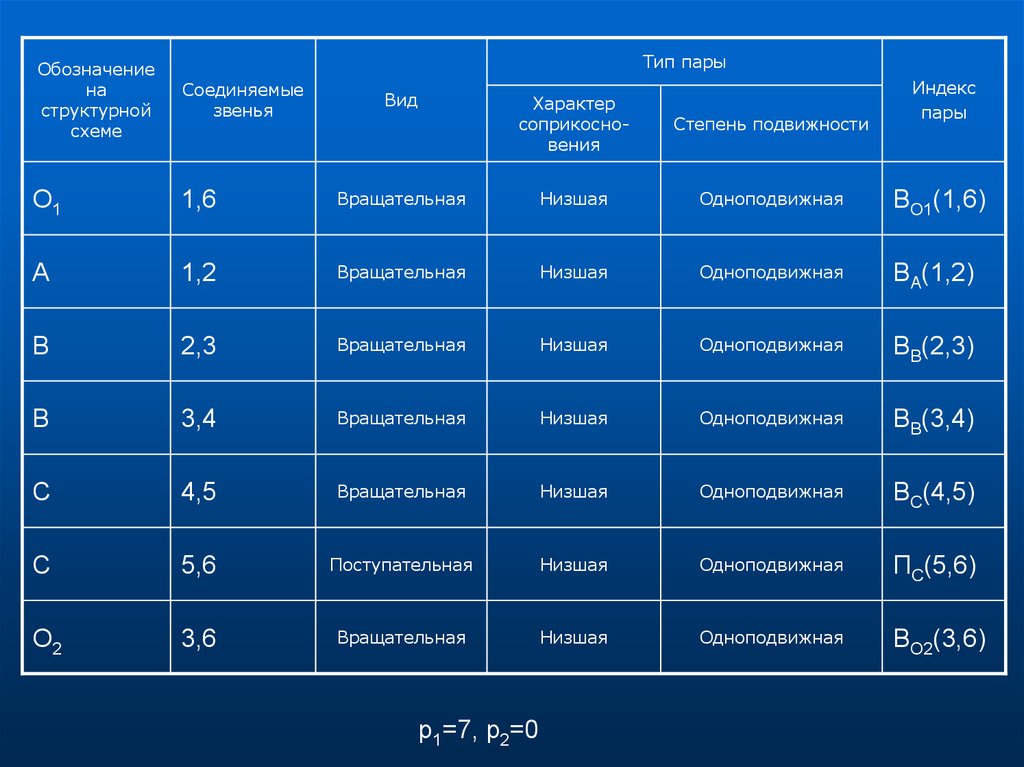
21.
Обозначениена
структурной
схеме
Тип пары
Соединяемые
звенья
Вид
Характер
соприкосновения
Степень подвижности
Индекс
пары
O1
1,6
Вращательная
Низшая
Одноподвижная
BO1(1,6)
A
1,2
Вращательная
Низшая
Одноподвижная
BA(1,2)
B
2,3
Вращательная
Низшая
Одноподвижная
BB(2,3)
B
3,4
Вращательная
Низшая
Одноподвижная
BB(3,4)
C
4,5
Вращательная
Низшая
Одноподвижная
BC(4,5)
C
5,6
Поступательная
Низшая
Одноподвижная
ПC(5,6)
O2
3,6
Вращательная
Низшая
Одноподвижная
BO2(3,6)
p1=7, p2=0
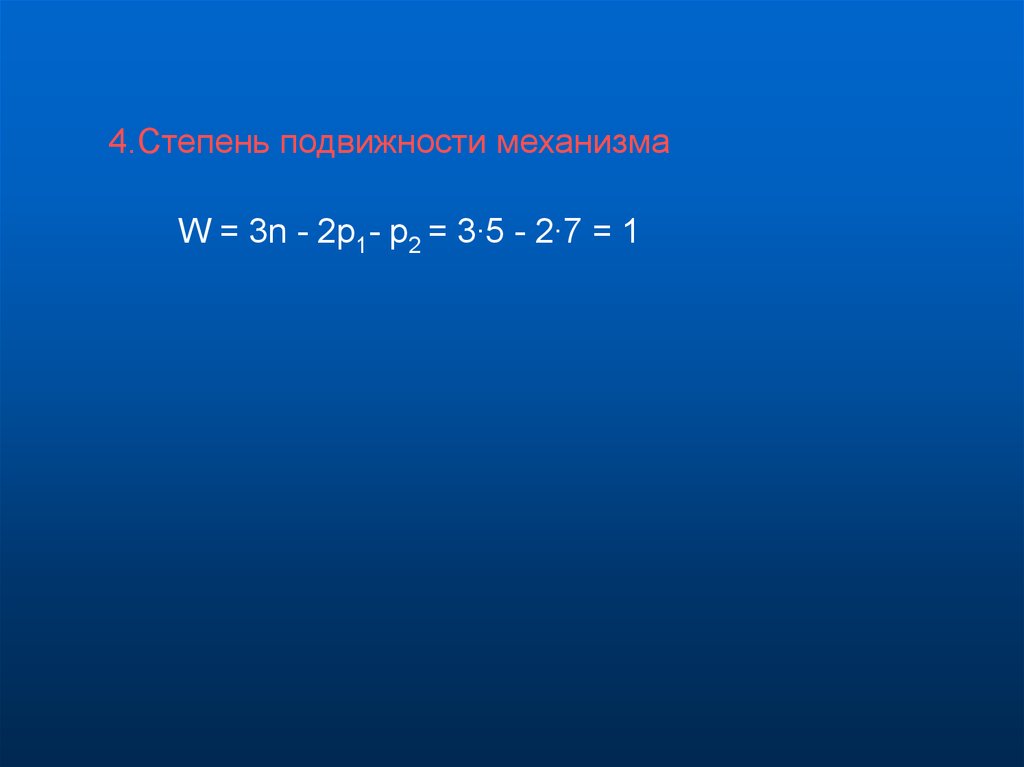
22.
4.Степень подвижности механизмаW = 3n - 2p1- p2 = 3∙5 - 2∙7 = 1
23.
5.Строение групп АсcураB
а) Последняя группа Асcура
4
5
II класс, 2 порядок, вид ВВП
C
6
Структурная формула
4,5
B 3,4 BC ( 4,5) П С (5,6)
B
б) Предпоследняя группа Асcура
II класс, 2 порядок, вид ВВВ
2
A
3
Структурная формула
2,3
A 1,2 B 2,3 O 3,6
2
6
O2
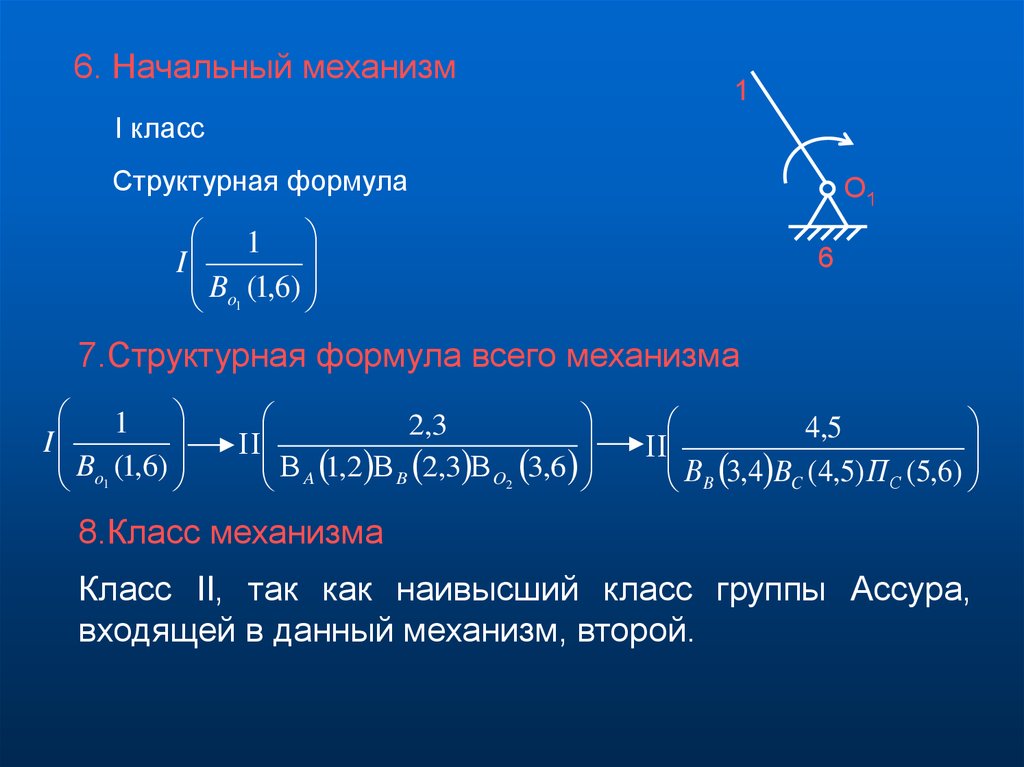
24.
6. Начальный механизм1
I класс
Структурная формула
O1
1
I
Bo (1,6)
1
6
7.Структурная формула всего механизма
1
I
Bo (1,6)
1
2,3
A 1,2 B 2,3 O 3,6
2
4,5
ВB 3,4 BC ( 4,5) П С (5,6)
8.Класс механизма
Класс II, так как наивысший класс группы Ассура,
входящей в данный механизм, второй.