










































 electronics
electronicsSimilar presentations:










Классификация электрических машин
1.
2.
Классификация электрических машинГенераторы
Двигатели
преобразуют механическую энергию в
электрическую посредством ЭМ-поля
преобразуют электрическую энергию в
механическую посредством ЭМ-поля
Трансформаторы
преобразуют один уровень
напряжения и тока в другой уровень напряжения и тока
Датчики
получают информацию о механическом
перемещении и преобразуют её в
электрический сигнал
3.
Три основных закона электромеханикиПреобразование энергии осуществляется с
коэффициентом полезного действия (кпд) меньше 1
P2
η=
P1
P2= P1− Σ p
Σp — сумма электрических, магнитных и механических
потерь энергии
η = 1−
Σp
<1
P1
4.
Электрические двигатели и генераторы обратимы:одна и та же электрическая машина при наличии
ЭМ-поля может работать и в режиме двигателя, и в
режиме генератора
Электромеханическое преобразование энергии
осуществляется ЭМ-полями, неподвижными
относительно друг друга
5.
Асинхронные машины(двигатели)
6.
Асинхронные двигатели с короткозамкнутым роторомпримерно 90% всех двигателей
7.
Создатели асинхронного двигателя1888 г.
1888 г.
Никола Тесла
1889 г.
1890 г.
М.О. Доливо-Добровольский
8.
Механическая характеристика асинхронного двигателяМеханическая мощность:
Pмех = M⋅ ω=
M⋅ 2π⋅ n
60
9.
10.
11.
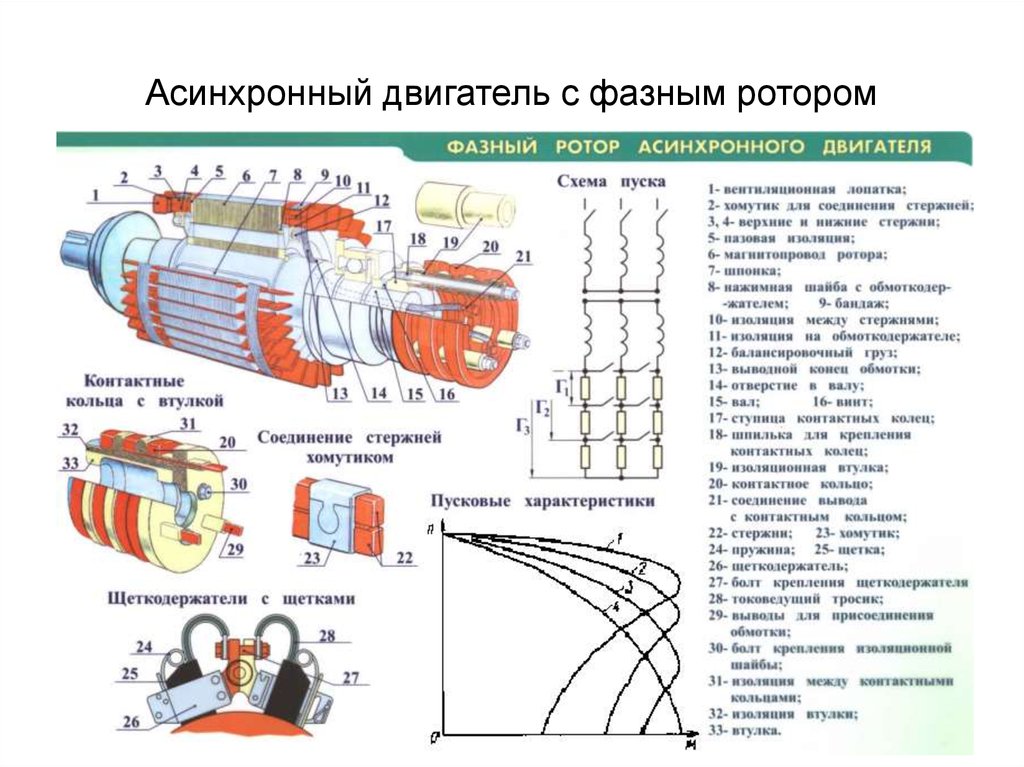
Доливо-Добровольский первым создалдвигатель с короткозамкнутым ротором
и исследовал его свойства.
Он выяснил, что у таких двигателей
есть очень серьёзный недостаток –
ограниченный пусковой момент.
Им же была предложена конструкция
двигателя с фазным ротором.
12.
Асинхронный двигатель с фазным ротором13.
14.
Короткозамкнутый роторФазный ротор
15.
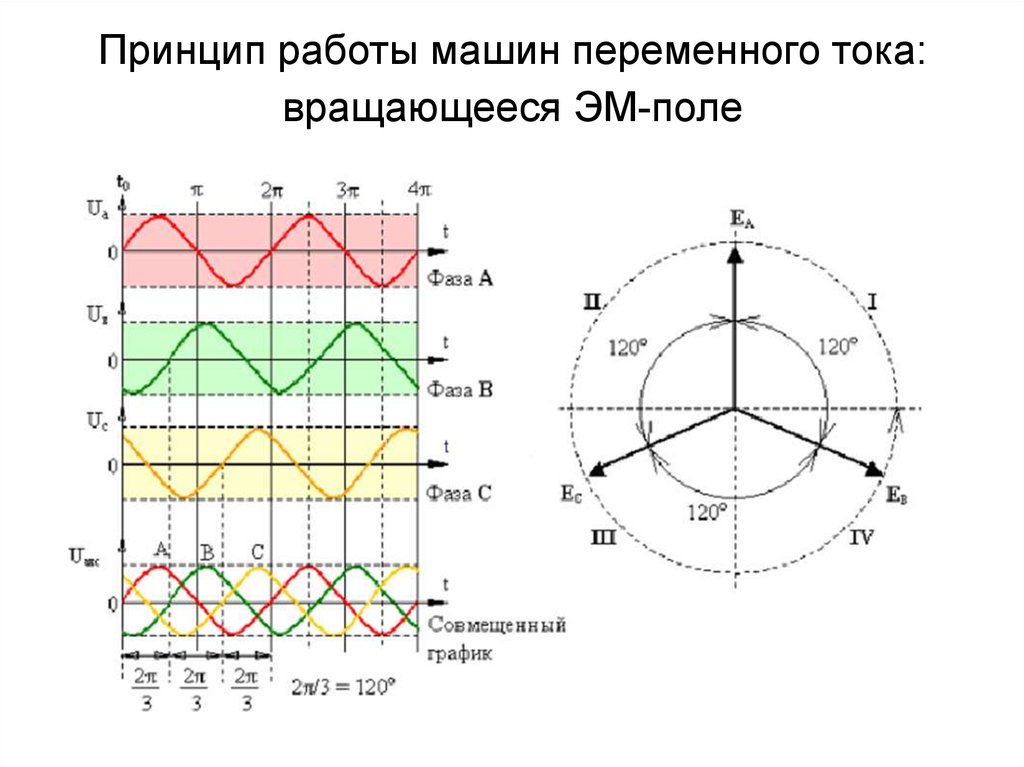
Принцип работы машин переменного тока:вращающееся ЭМ-поле
16.
Вращение асинхронного двигателя за счётдействия 2-х законов
1. Закон электромагнитной индукции
17.
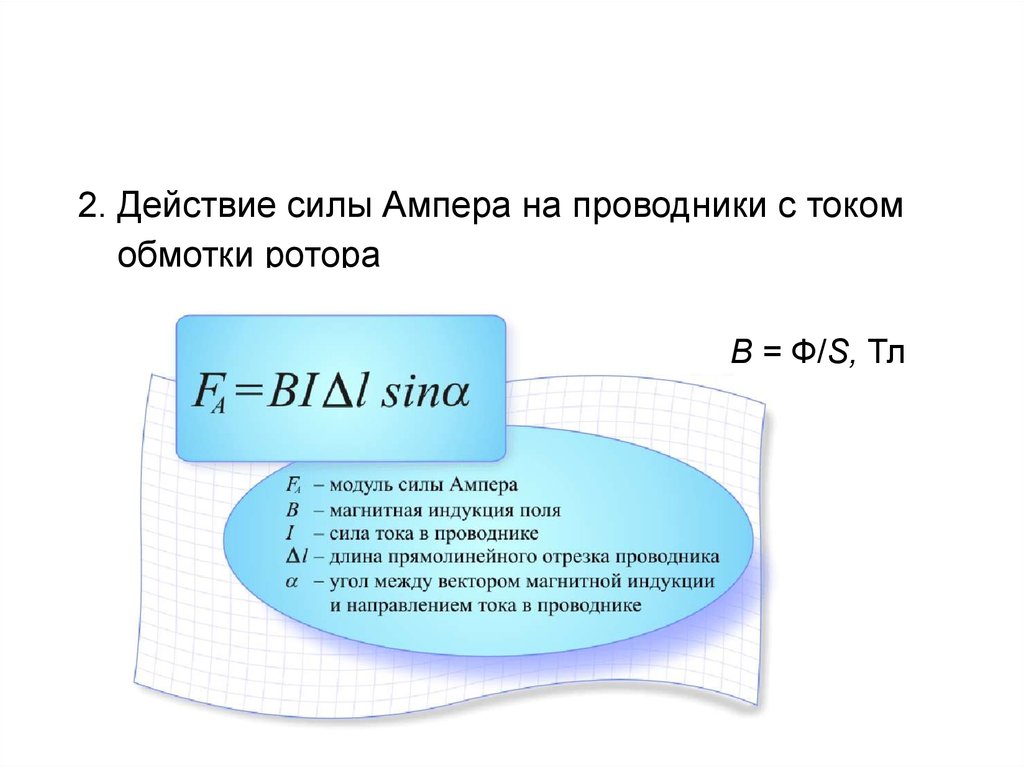
2. Действие силы Ампера на проводники с токомобмотки ротора
B = Ф/S, Тл
18.
Конструкция статораСердечник статора – полый цилиндр,
собранный из отдельных кольцевых
пластин, штампованных из листов
электротехнической стали (0,5 мм).
Пластины изолированы друг от друга
с помощью лака или оксидирования
(для уменьшения потерь на
гистерезис и вихревые токи)
19.
Собранный пакет колец статора запрессован вкорпус – станину (чугун), которая крепится к
неподвижному жесткому основанию.
В пазах статора размещаются три фазные обмотки.
Каждая фазная обмотка состоит из нескольких
последовательно включенных катушек
20.
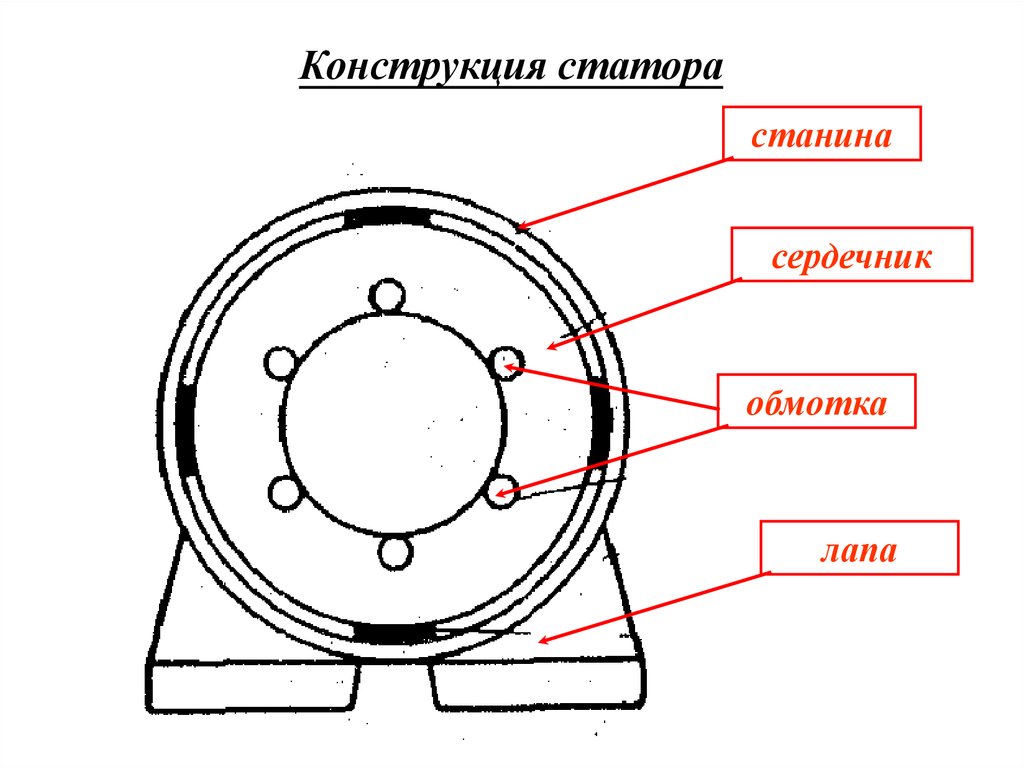
Конструкция статорастанина
сердечник
обмотка
лапа
21.
22.
ГОСТ 2479-79 Машины электрическиевращающиеся. Условные обозначения
конструктивных исполнений по
способу монтажа
23.
Начала и концы фаз обмоток статоравыведены на клеммник, закреплённый на
станине. Обмотка статора может быть
соединена по схеме звезда или треугольник.
Выбор схемы соединения обмотки статора
зависит от линейного напряжения сети и
паспортных данных двигателя. В паспорте
трёхфазного двигателя задаются линейные
напряжения сети и схема соединения
обмотки статора. Например, 660/380, Y/∆.
Данный двигатель можно включать в сеть
с Uл = 660В по схеме звезда или в сеть с
Uл = 380В – по схеме треугольник.
24.
iAiB
iC
t
t1 t 2 t 3 t 4
25.
Ток в начале обмотки будемсчитать направленным к нам,
если его значение положительно
t t1
А
Y
С
Х
Z
i A 0,
i B 0,
B
iC 0
26.
t t2А
Y
С
Z
Х
i A 0,
i B 0,
B
iC 0
27.
t t3А
Y
С
Z
i A 0,
i B 0,
Х
B
iC 0
28.
t t4Y
С
А
Z
i A 0,
i B 0,
B
Х
iC 0
29.
- Если поменять любые две фазыместами, то изменится направление
вращения магнитного поля
(реверсирование)
- Видоизменив обмотку статора, можно
получить вращающееся магнитное поле
с несколькими парами полюсов.
Если каждая фаза будет состоять из
двух катушек, cдвинутых на 1800, то
магнитное поле будет иметь 2 пары
полюсов (р = 2)
30.
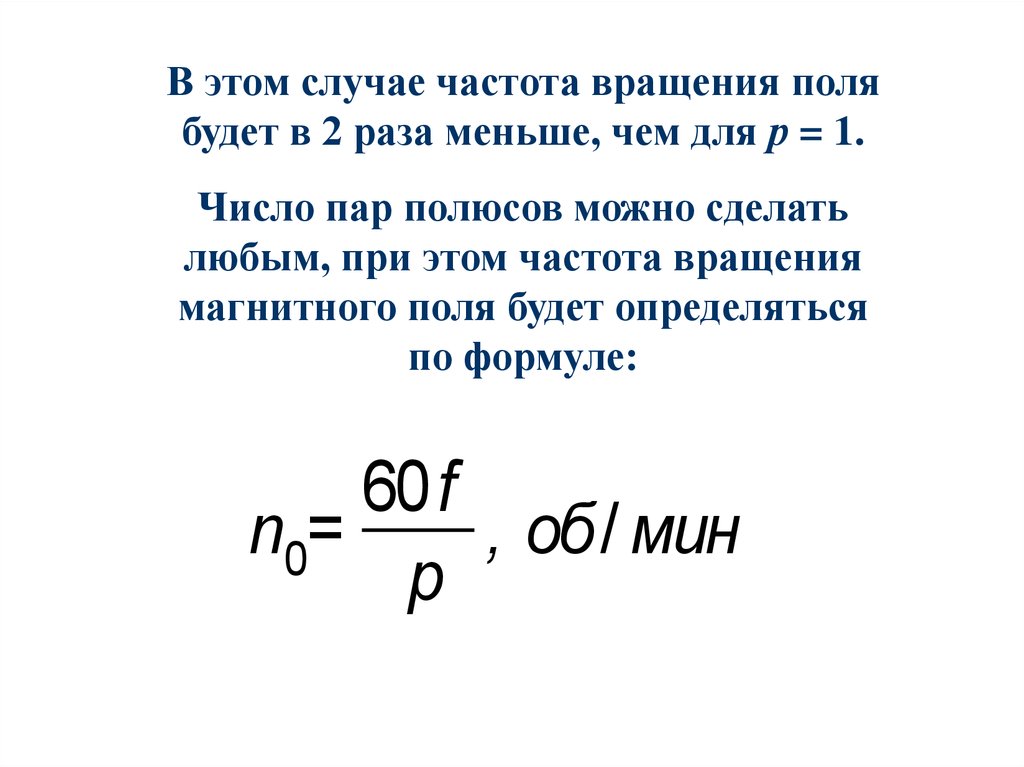
В этом случае частота вращения полябудет в 2 раза меньше, чем для р = 1.
Число пар полюсов можно сделать
любым, при этом частота вращения
магнитного поля будет определяться
по формуле:
60f
n0=
, об/ мин
p
31.
Частоты вращения магнитногополя
p
n0
1
2
3
4
5
3000 1500 1000 750 600
32.
Режимы работы трехфазнойасинхронной машины
Режим двигателя: на обмотку статора
подается симметричная система токов и
в машине создается вращающееся
магнитное поле с частотой вращения n0.
Силовые линии этого поля пересекают
обмотку ротора, и в ней по закону
электромагнитной индукции наводится
ЭДС, и по обмотке ротора протекают
токи.
33.
Взаимодействие вращающегосямагнитного поля и токов ротора создает
вращающий момент, увлекающий ротор
за вращающимся магнитным полем.
Если этот момент достаточно велик, то
ротор приходит во вращение и его
установившаяся частота вращения n2
соответствует равенству вращающего
момента МВР тормозному МТ,
приложенному к валу от приводимого
во вращения механизма и внутренних
сил трения.
34.
Относительную разность частотвращения магнитного поля и ротора
называют скольжением:
В режиме двигателя, т.е. преобразование
электрической энергии в механическую
0 s 1
35.
Режим генератораЕсли на работающем двигателе ротор
разогнать с помощью двигателя до
частоты > n0 в том же направлении, то
машина перейдет в генераторный режим
и избыток механической мощности
преобразуется в электрическую.
s 0
36.
Режим электромагнитного тормоза (S ≥ 1).Ротор вращается в направлении,
противоположном направлению вращения поля
статора.
Это возможно при реверсе (поле поменяло
направление вращения, а ротор все еще
вращается в противоположном направлении
(если МТ > МВР).
Применяется для быстрой остановки двигателя,
для торможения приводного механизма
(крановые и подъемные устройства при спуске
грузов)
37.
n2двигатель
тормоз
n0
генератор
s
0
1
38.
Влияние S на частоту э.д.с.ротора и её значение
E1= 4.44 f1w1ФМ
E2= 4.44 f2s w2ФМ
f1 - частота сети,
f2s – частота изменения магнитного поля
во вращающемся роторе
W1 и W2- число витков в фазных обмотках
статора и ротора,
ФМ – магнитный поток статора
f1 ≠ f2s
39.
n s = n 1 – n2частота скольжения
f2s = nsp где р – число пар полюсов
f2s = nS pn0 /n0
f2s = spn0
f2s = sf1
Тогда
Е2s = sE20
где E20 - э.д.с. ротора в состоянии покоя
40.
Зависимость электромагнитного момента от скольженияМмакс
неустойчивый режим
перегрузка
Мном
Рабочий
режим
SКР
S
41.
Механическая характеристикаМC
n
n1
в
а
nКР
б
0
Мном
Ммакс
М макс
2 2.5
М ном
М
42.
Регулирование частоты вращенияасинхронного двигателя
Частота вращения ротора
60 f
n2
(1 s )
p
С короткозамкнутым ротором:
- метод частотного регулирования:
- метод изменения числа пар полюсов
вращающегося магнитного поля.
С фазным ротором - также метод реостатного
регулирования.
43.
Метод частотного регулированияЭто плавное регулирование частоты
вращения магнитного поля путем
регулирования частоты тока в
обмотке статора .
Достоинства:
-плавность
и
большой
диапазон
регулирования частоты,
-экономичность, т.к. не выделяются
дополнительные потери.
44.
45.
Метод изменения числа пар полюсовОснован на изменении числа пар полюсов
вращающегося магнитного поля статора, т.
е. на изменении частоты вращения
магнитного поля n1 = 60 f1 /р
2π
⋅
f
При f1 =const ω =
П
p
зависит только от р
1 способ (у АД небольшой мощности): на статор
поместить две отдельные обмотки.
2 способ (у АД большой мощности): путем
изменения схемы соединения катушек одной
обмотки статора, что приведет к изменению
числа пар полюсов.
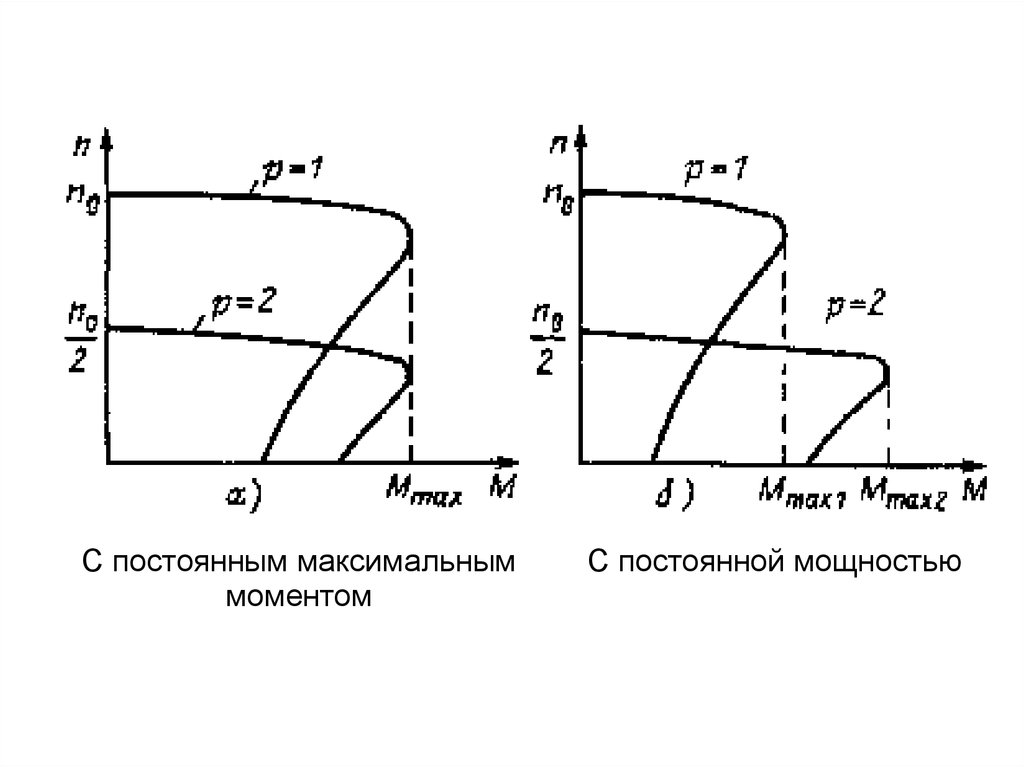
46.
С постоянным максимальныммоментом
С постоянной мощностью
47.
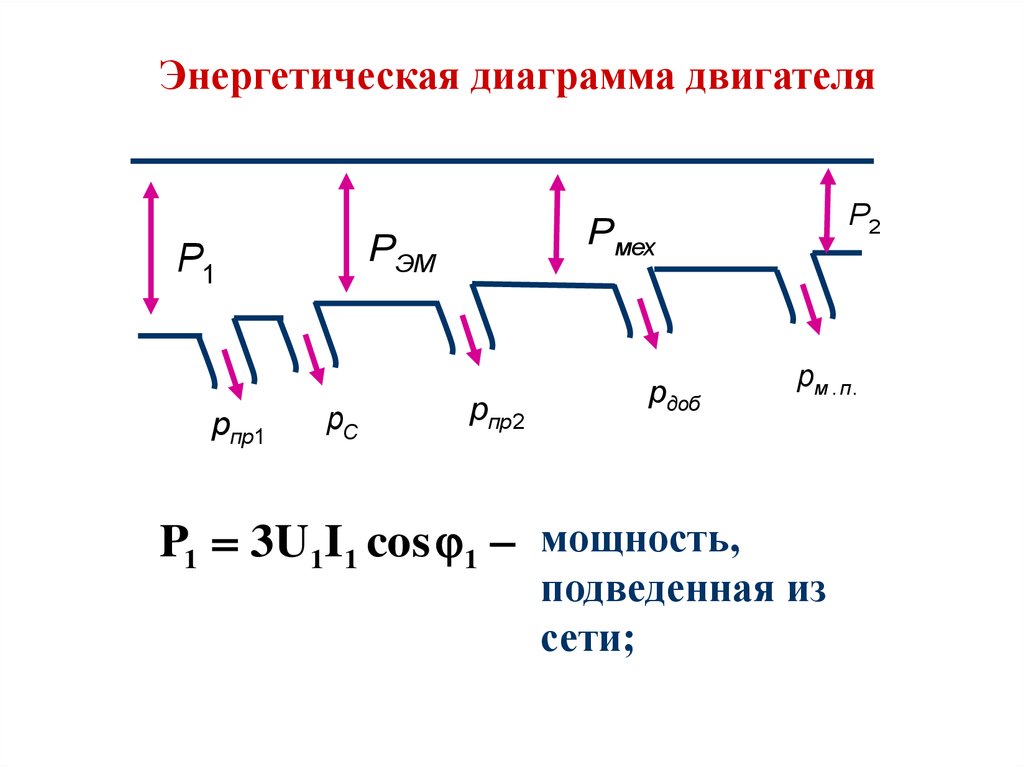
Энергетическая диаграмма двигателяpпр1
Pмех
PЭМ
P1
pC
P2
pпр2
pдоб
P1 3U1I 1 cos 1 мощность,
pм . п.
подведенная из
сети;
48.
pпр1 −pC −
мощность потерь на нагревание
проводов обмотки статора (потери в
меди);
мощность потерь на гистерезис и
вихревые токи в обмотке статора (потери в
стали);
электромагнитная
PЭМ М ВР 1 мощность, передаваемая
ротору;
мощность потерь на нагревание
pпр2−
проводов обмотки ротора (потери в
меди);
Pмех М ВР 2 механическая мощность;
49.
pдоб−pм . п.−
P2
добавочные потери (создаются
пульсациями магнитного поля);
механические потери;
полезная механическая мощность,
отдаваемая на валу двигателя
P2
η=
P1
50.
Режимы работы электрических машин см. в ГОСТ IEC 60034-1-201451.
Синхронные машины52.
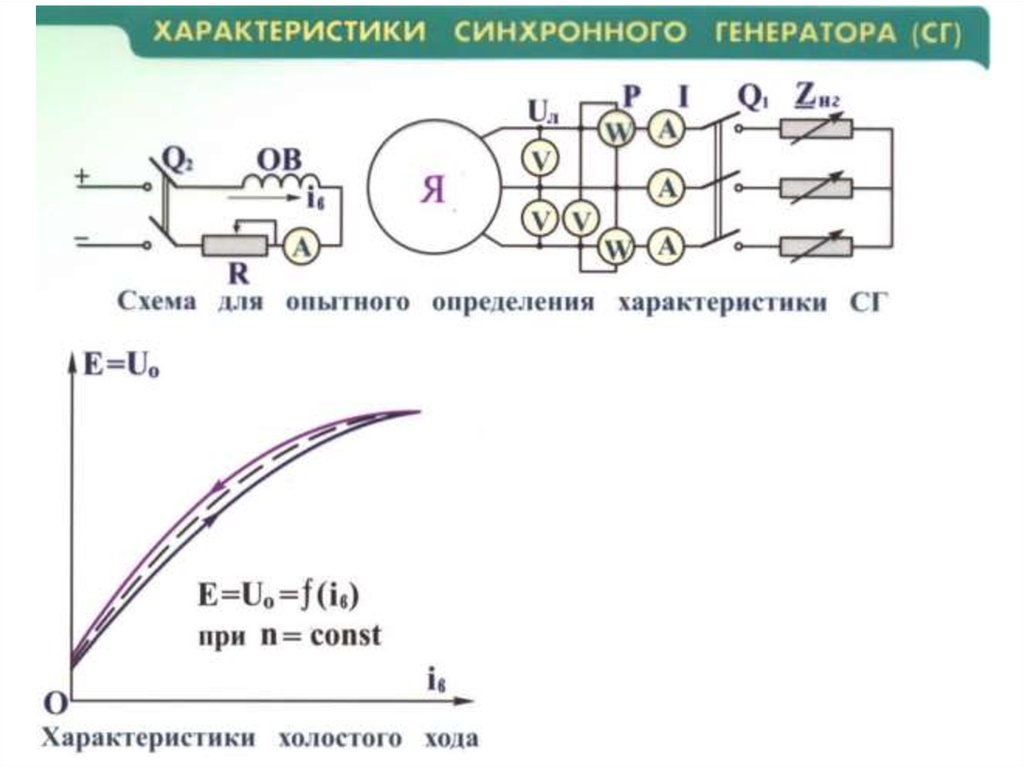
53.
54.
55.
56.
57.
Реакция якоря в синхронном генератореАктивная нагрузка
Индуктивная нагрузка
Емкостная нагрузка
58.
59.
U-образные характеристикисинхронного двигателя / компенсатора
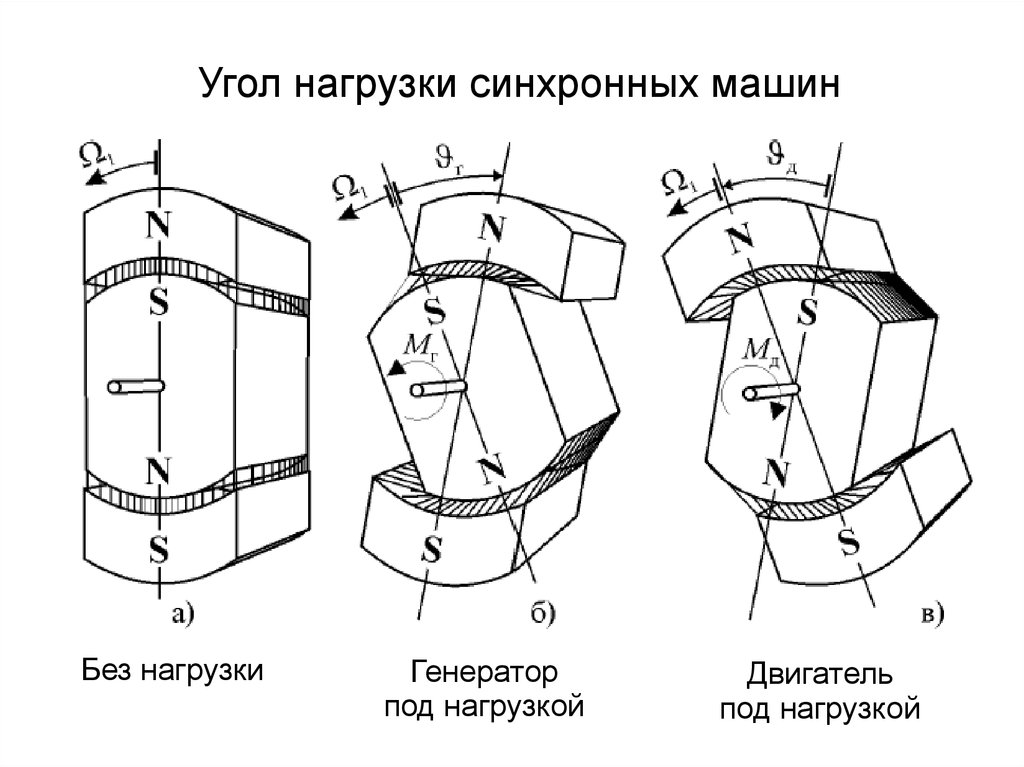
60.
Угол нагрузки синхронных машинБез нагрузки
Генератор
под нагрузкой
Двигатель
под нагрузкой