













 warfare
warfareSimilar presentations:



")
 (4/4 ч)")
")

")


Устройство выработки команд (формирователь сигнала управления ракетой (ФСУР)
1. Т е м а № 2. «Зенитная управляемая ракета 9М39.»
Занятие № 15. «Устройствовыработки команд
(формирователь сигнала
управления ракетой (ФСУР)».
2.
Вопросы занятия:1-ый вопрос: Назначение, общее устройство, принцип
работы устройства выработки команд.
2-ой вопрос: Работа УВК по функциональной схеме.
3-ий вопрос: Принцип создания управляющей силы с
помощью одной пары рулей.
3. 1-ый вопрос: Назначение, общее устройство, принцип работы устройства выработки команд.
Приавтоматическом
слежении
за
движущейся
в
пространстве воздушной целью оптическая ось КД всегда
будет отставать от линии визирования цели на величину ∆ε
= εл - εа (рис. 1), причем величина угла рассогласования ∆ε
тем больше, чем больше скорость углового перемещения
цели относительно ракеты. Следовательно, значение ∆ε с
достаточной степенью точности можно считать равным
величине угловой скорости линии визирования εл.
Информация об ∆ε, а значит, и об εл заложена в
управляющем напряжении, вырабатываемом в электронном
блоке СКЦ.
Устройство выработки команд (УВК) предназначено для
формирования сигнала (команды) управления рулями
ракеты в соответствии с принятым методом самонаведения.
4.
Рис.1 Схема выделения ошибки слежения.5.
В состав устройства выработки команд входят:- синхронный фильтр;
- динамический ограничитель;
- сумматор сигналов.
Для формирования закона управления рулями, жестко связанными с
корпусом ракеты, по методу пропорционального сближения
информацию о величине угловой скорости линии визирования
цели (ошибке наведения), следующей на частоте вращения
ротора гироскопа, необходимо преобразовать в частоту вращения
корпуса ракеты. При этом синусоидальный сигнал на частоте вращения
ракеты также должен содержать информацию о величине и направлении
ошибки наведения.
В одноканальной бортовой аппаратуре ракеты изменение
положения центра масс ракеты осуществляется с помощью одной
пары рулей, работающих в релейном режиме, т. е.
отклоняющихся от упора до упора. При этом направление отклонения
рулей зависит от полярности сигнала, сформированного устройством
выработки команд. Сигналу положительной полярности соответствует
отклонение руля в одну сторону, а отрицательной - в другую.
6.
Для создания управляющей силы с помощью одной пары рулейнеобходимо принудительно осуществлять вращение ракеты
относительно продольной оси (по крену) так, чтобы за каждый оборот
ракеты равнодействующая управляющая сила была направлена в
требуемом направлении.
Синхронный фильтр в составе собственно синхронного фильтра (СФ) и
динамического ограничителя осуществляет фильтрацию сигнала
управления с выхода усилителя коррекции (УК) узкополосным фильтром
(СФ) с обеспечением стабильности коэффициента передачи и сохранением
заданной инерционности за счет включения на выходе СФ усилителя динамического ограничителя с большим входным сопротивлением (ДО). С
выхода ДО сигнал управления по угловой скорости линии визирования
«ракета-цель» поступает на вход сумматора Σ-I. На другой его вход
поступает сигнал пропорциональный углу пеленга. Таким образом, на
выходе синхронного фильтра формируется сигнал управления по угловой
скорости линии визирования «ракета-цель» и пеленгу в виде
гармонического напряжения на суммарной частоте вращения ротора
гироскопа ωГ и корпуса ракеты ΩР. Суммарный сигнал управления
соответствует реализации закона управления по угловой скорости линии
визирования «ракета-цель» с упреждением, чем обеспечивается
эффективное управление полетом ракеты на участке встреливания.
7. 2-ой вопрос: Работа УВК по функциональной схеме.
Рис. 2. Схема построения УВК в одноканальной бортовой аппаратуреракеты.
8.
С выхода электронного блока следящего координатора цели (СКЦ)на вход фазового детектора поступает синусоидальный сигнал управления
на частоте вращения ротора гироскопа, содержащий информацию о
величине (амплитуда сигнала) и направлении (фаза сигнала) угловой
скорости линии визирования цели.
На другой вход фазового детектора подключено напряжение, снимаемое
с катушек генератора опорного напряжения (ГОН) на суммарной частоте
вращения ротора гироскопа и ракеты fГ + fР, так как они вращаются в
разные стороны. Сигнал на выходе фазового детектора содержит две
составляющие: одна - на суммарной (fР + 2fГ), а другая - на разностной
частоте (fР) вращения ракеты и ротора гироскопа. Первая составляющая
отфильтровывается с помощью фильтра фазового детектора, а вторая,
содержащая информацию о величине и направлении вектора угловой
скорости линии визирования цели на частоте вращения ракеты, поступает
на вход сумматора, где складывается с синусоидальным сигналом
генератора линеаризации, который имеет постоянную амплитуду и
частоту, равную удвоенной частоте вращения ракеты. Генератор
линеаризации расположен в автопилоте. (см. СХЕМУ)
9. 3-ий вопрос: Принцип создания управляющей силы с помощью одной пары рулей.
Из рис. 3, а следует, что если подать с выхода УВК синусоидальныйсигнал, пропорциональный ошибке наведения на частоте вращения
ракеты (без суммирования с напряжением линеаризации), то рули будут
перебрасываться из одного крайнего положения в другое через каждую
половину оборота ракеты (рис. 3, б).
10.
Если за начало отсчета взять момент, когда управляющая силанаправлена строго вверх (точка 0 на рис. 3, в), то за первую четверть
оборота ракеты направление управляющей силы будет меняться по
окружности между точками 0 и 1. Изменение равнодействующей
управляющей силы показано на рис. 3, г (точки 0 и 1). Изменение
направления и равнодействующей управляющей силы за вторую четверть
оборота ракеты происходит по кривым между точками 1 и 2 (рис. 3, в, г).
Через половину оборота ракеты рули перебрасываются в другое крайнее
положение и направление управляющей силы меняется на 180° (точки 2 и
2' на рис. 3, в). Управляющая сила опять направлена вверх и за вторую
половину оборота ракеты изменение управляющей силы и ее
равнодействующей повторяется.
11.
Величина и направление равнодействующей силы показаны на рис.3, г векторами:
R1 - за первую четверть оборота ракеты;
R2 - за половину оборота ракеты;
R3 - за три четверти оборота ракеты;
R4 - за оборот ракеты.
В итоге за полный оборот ракеты по крену равнодействующая
управляющей силы будет направлена вправо и иметь максимальную
величину Rmax.
Изменяя фазу сигнала, можно управлять направлением
равнодействующей силы в пространстве.
Основным недостатком рассмотренного способа создания
управляющей силы является невозможность реализации метода
пропорционального сближения ракеты с целью, так как при этом
управляющая сила не зависит от величины (амплитуды) ошибки
наведения. Этот факт и вызывает необходимость ввода напряжения
линеаризации.
12.
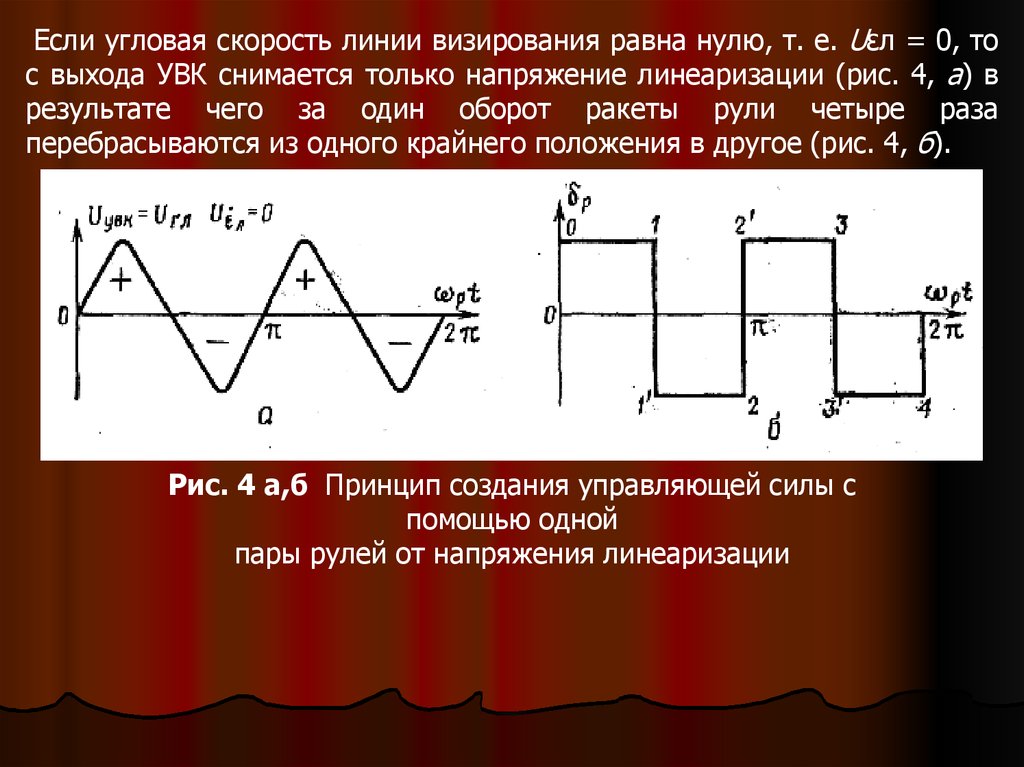
Если угловая скорость линии визирования равна нулю, т. е. Uεл = 0, тос выхода УВК снимается только напряжение линеаризации (рис. 4, а) в
результате чего за один оборот ракеты рули четыре раза
перебрасываются из одного крайнего положения в другое (рис. 4, б).
Рис. 4 а,б Принцип создания управляющей силы с
помощью одной
пары рулей от напряжения линеаризации
13.
Изменение направления управляющей силы через каждуючетверть оборота ракеты показано на рис. 4, в:
точки 0 и 1 - за первую четверть;
точки 1' и 2 -за вторую четверть;
точки 2' и 3 - за третью четверть;
точки 3' и 4 - за четвертую четверть.
Рис. 4 в. Принцип создания управляющей силы с помощью одной пары рулей
от напряжения линеаризации.
14.
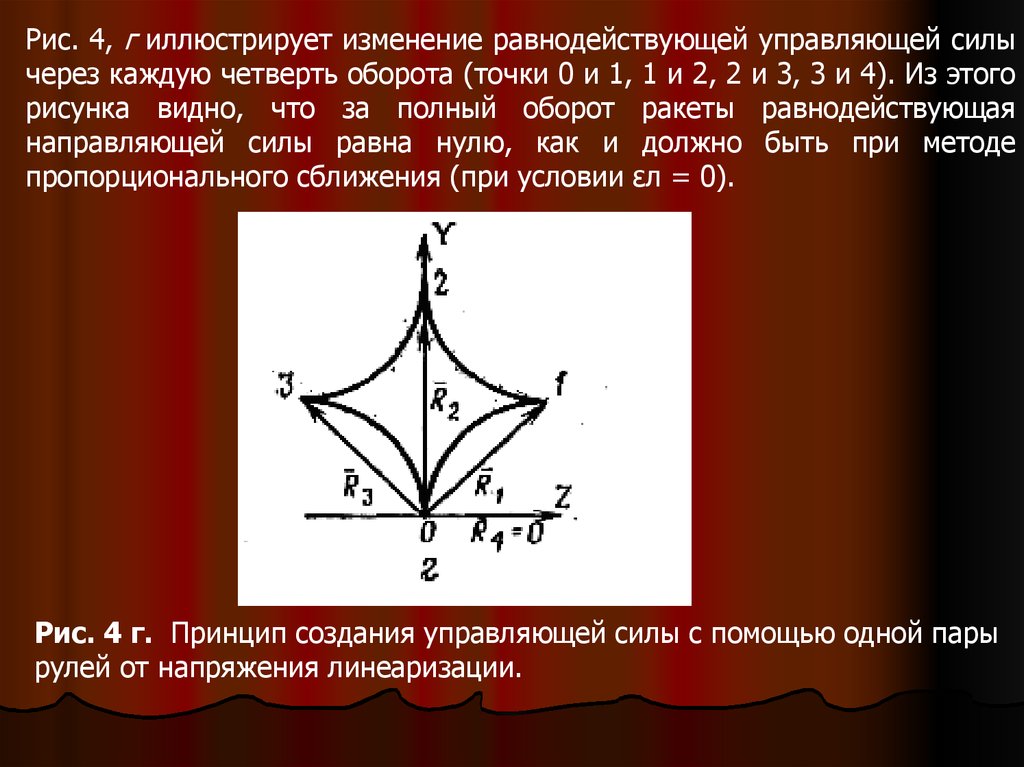
Рис. 4, г иллюстрирует изменение равнодействующей управляющей силычерез каждую четверть оборота (точки 0 и 1, 1 и 2, 2 и 3, 3 и 4). Из этого
рисунка видно, что за полный оборот ракеты равнодействующая
направляющей силы равна нулю, как и должно быть при методе
пропорционального сближения (при условии εл = 0).
Рис. 4 г. Принцип создания управляющей силы с помощью одной пары
рулей от напряжения линеаризации.
15.
Если значение угловой скорости линии визирования не равно нулю, топосле сложения напряжения с фазового детектора Uεл с напряжением
линеаризации UГЛ результирующее напряжение с УВК UУВК изменяется
по закону, изображенному на рис. 5, а.
Рис. 5 а. Принцип образования управляющей силы с помощью одной
пары рулей
в одноканальной бортовой аппаратуре
16.
На рис. 5, б показаны моменты (по отношению к углу поворотаракеты) переброса рулей.
Рис. 5 б. Принцип образования управляющей силы с
помощью одной пары рулей
в одноканальной бортовой аппаратуре
17.
Характер изменения направления управляющей силы иллюстрируется нарис. 5, в,
Рис. 5 в. Принцип образования управляющей силы с
помощью одной пары рулей
в одноканальной бортовой аппаратуре
18.
Характер изменения равнодействующей силы показан на рис. 5, г.Рис. 5 г. Принцип образования управляющей силы
с помощью одной пары рулей
в одноканальной бортовой аппаратуре