














 warfare
warfareSimilar presentations:


")







Силы и моменты, действующие на ракету в полёте
1. Тема № 2. «Зенитная управляемая ракета 9М39.»
Занятие № 3. «Силы имоменты, действующие на
ракету в полёте».
2.
Вопросы занятия:1-ый вопрос: Аэродинамическая компоновка
ЗУР.
2 - ой вопрос: Аэродинамические моменты,
действующие на ракету в полете.
3 – ий вопрос: Перегрузки, создаваемые на
ракете.
4-ый вопрос: Силы, действующие на ракету в
полёте.
3. 1-ый вопрос: Аэродинамическая компоновка ЗУР.
Под аэродинамической компоновкой ЗУР понимается взаимноеразмещение основных частей ракеты.
Аэродинамическая схема ЗУР в общем случае включает в себя корпус,
крылья, органы управления и стабилизации.
Аэродинамически симметричной называется ракета, при вращении
которой вокруг продольной оси, при заданной ориентации её
относительно набегающего воздушного потока, аэродинамические силы и
моменты не меняются как по величине, так и по направлению.
В зависимости от взаимного расположения рулей и крыльев на корпусе
ракеты, аэродинамическая компоновка её может быть выполнена:
- по нормальной схеме;
- по схеме «безхвостка»;
- по схеме «утка»;
- по схеме с поворотным крылом.
4.
Нормальнаякомпоновки ЗУР.
схема
аэродинамической
5.
Аэродинамическая схема ЗУР типа "безхвостка".6.
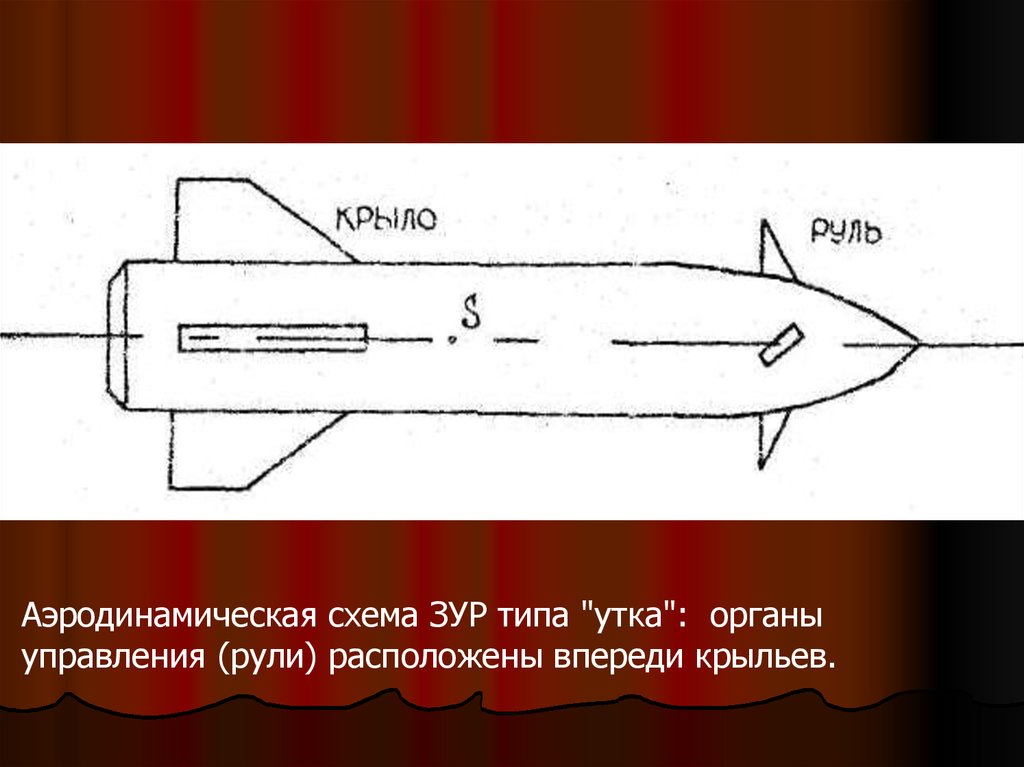
Аэродинамическая схема ЗУР типа "утка": органыуправления (рули) расположены впереди крыльев.
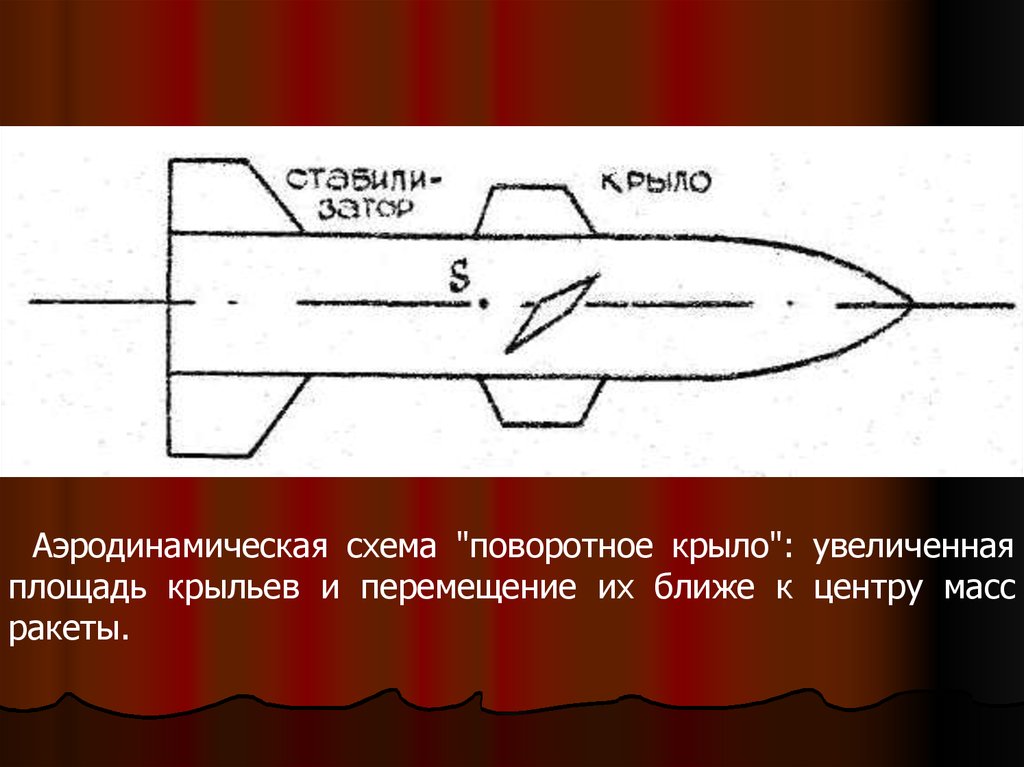
7.
Аэродинамическая схема "поворотное крыло": увеличеннаяплощадь крыльев и перемещение их ближе к центру масс
ракеты.
8. 2-ой вопрос. Аэродинамические моменты, действующие на ракету в полете.
При решении задачи аэродинамической компоновки ракетыучитывают, что центр давления и центр масс ракеты не
совпадают, и поэтому на неё действует главный момент
аэродинамических сил МR. Момент МR силы R изображают
приложенным в центре S вектором МR →
9.
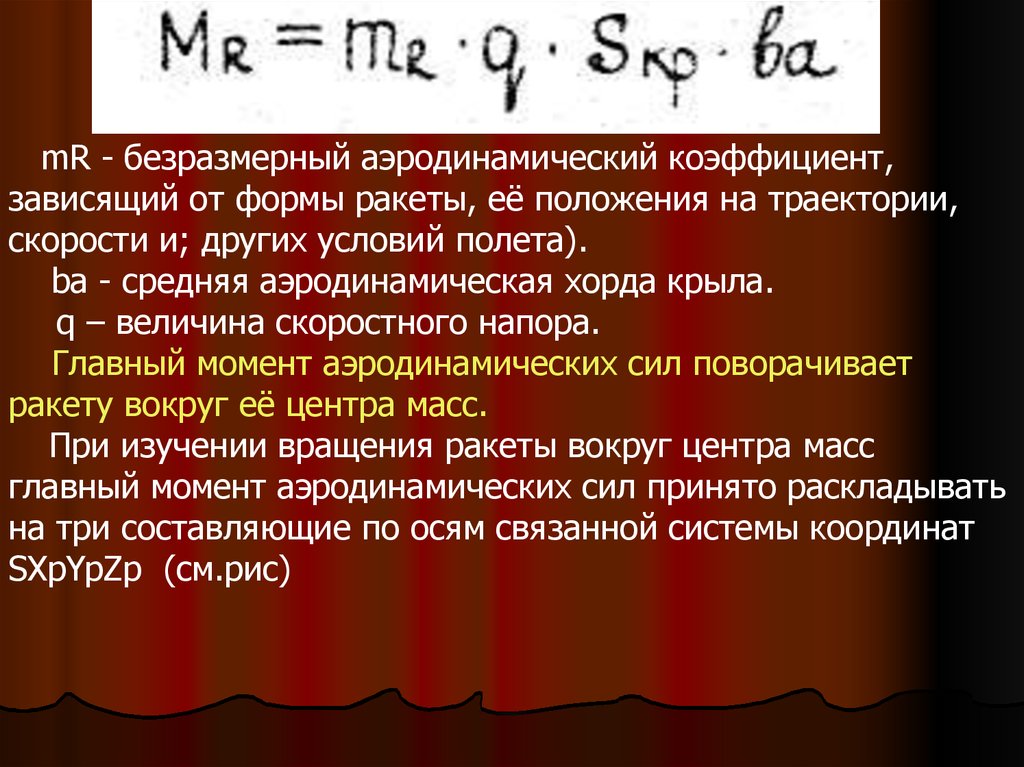
mR - безразмерный аэродинамический коэффициент,зависящий от формы ракеты, её положения на траектории,
скорости и; других условий полета).
ba - средняя аэродинамическая хорда крыла.
q – величина скоростного напора.
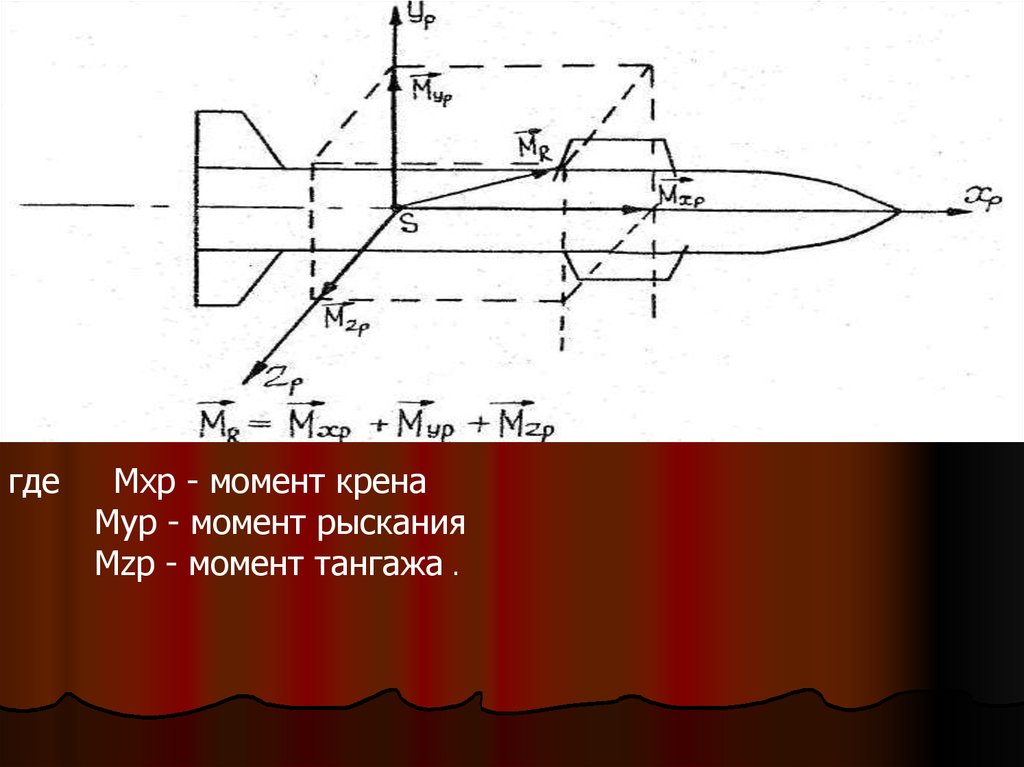
Главный момент аэродинамических сил поворачивает
ракету вокруг её центра масс.
При изучении вращения ракеты вокруг центра масс
главный момент аэродинамических сил принято раскладывать
на три составляющие по осям связанной системы координат
SXpYpZp (см.рис)
10.
гдеМхр - момент крена
Мyр - момент рыскания
Мzр - момент тангажа .
11.
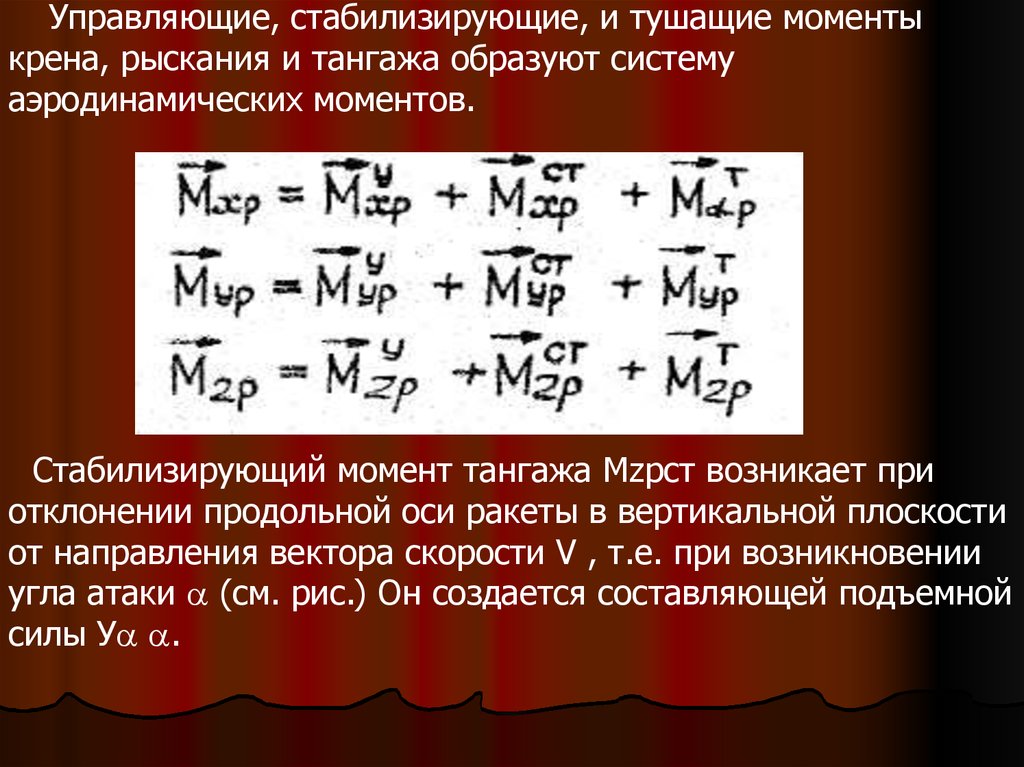
Управляющие, стабилизирующие, и тушащие моментыкрена, рыскания и тангажа образуют систему
аэродинамических моментов.
Стабилизирующий момент тангажа Мzpcт возникает при
отклонении продольной оси ракеты в вертикальной плоскости
от направления вектора скорости V , т.е. при возникновении
угла атаки (см. рис.) Он создается составляющей подъемной
силы У .
12.
Ракеты, которые под действием стабилизирующего моментавозвращаются в первоначальное положение, называются статически
устойчивыми.
Величина стабилизирующего момента тангажа пропорциональна углу
атаки α.
13.
Управляющий момент тангажа Mzpу возникает приотклонении органов управления от нулевого положения и
появления, как следствие этого, составляющей подъемной
силы YδδB
Величина управляющего момента тангажа зависит от угла
отклонения органов управления
где Mzpδ - коэффициент
пропорциональности управляющего
момента тангажа.
14.
Под воздействием управляющего момента тангажа ракетаповорачивается вокруг поперечной оси SZp и изменяет свое
положение относительно набегающего потока. Если бы при
этом не возникал стабилизирующий момент Мzpст,
который действует в противоположном направлении, то
ракета непрерывно вращалась бы вокруг оси SZp. При
условии равенства стабилизирующего момента управляющему
моменту (Мzpст = Мzpу), вращение ракеты прекратится и
установится угол атаки, который будет зависеть от угла
поворота органов управления.
15.
Тушащий (демпфирующий) момент тангажа МzрT обусловленвозникновением дополнительных аэродинамических сил при вращении
летящей ракеты вокруг своей поперечной оси SZp.
При вращении ракеты дополнительные аэродинамические силы в её
передней части будут направлены вниз, а в хвостовой части вверх.
Поэтому момент, обусловленный угловой скоростью вращения ракеты
вокруг оси SZp, будет иметь направление противоположное направлению
угловой скорости zр, Этот момент препятствует вращению ракеты и
поэтому называется тушащим (или демпфирующим) моментом тангажа,
знаки тушащего момента и угловой скорости противоположны.
16.
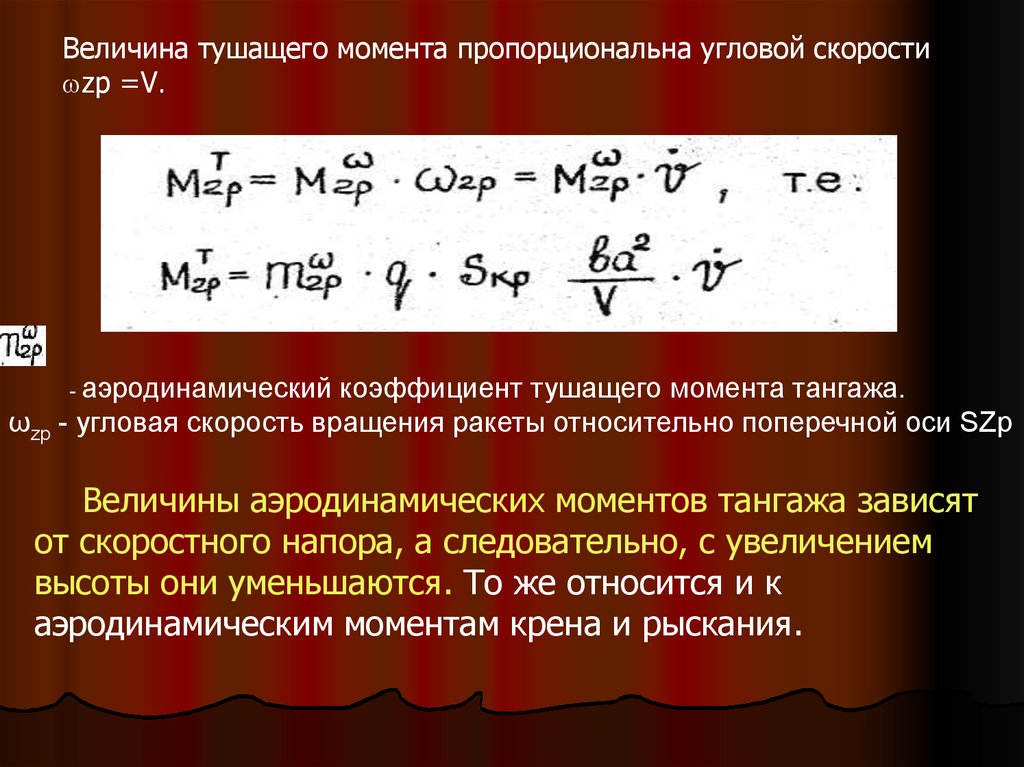
Величина тушащего момента пропорциональна угловой скоростиzр =V.
- аэродинамический
коэффициент тушащего момента тангажа.
ωzp - угловая скорость вращения ракеты относительно поперечной оси SZp
Величины аэродинамических моментов тангажа зависят
от скоростного напора, а следовательно, с увеличением
высоты они уменьшаются. То же относится и к
аэродинамическим моментам крена и рыскания.
17. 3-ий вопрос: Перегрузки, создаваемые на ракете.
18.
Кинематическая траектория ракеты представляет собой некоторуюкривую линию, каждую точку которой можно характеризовать некоторым
радиусом кривизны Rк. Этому радиусу кривизны при данной скорости
ракеты соответствует определенное значение потребных нормальных сил,
способных соответствующим образом изменить кривизну траектории
полета ЗУР.
Согласно третьему закону Ньютона
, где
- масса ракеты,
Fn - сумма проекций всех сил на ось Yc
Wn- нормальное ускорение ракеты.
Силы составляющие Fn можно измерять не в Ньютонах, а принять за
единицу измерения вес ракеты G, т.е. силу, эффект действия которой ускорение g - известен. В таком случае, разделив значение, силы Fn, на
вес ракеты G, можно сказать, сколько единиц веса содержится в ней и
какое ускорение в величинах g она создает.
Fn/G = m Wn / m g = Wn/g = n
19.
Число, полученное от деления величины силы, действующейна ракету, на вес ракеты, принято называть перегрузкой n.
Т.о. перегрузка есть число, показывающее во сколько раз сила,
действующая на ракету в полете больше веса ракеты. Перегрузки,
действующие вдоль осей SУс и SZс характеризуют быстроту изменения
направления полета ракеты в вертикальной или горизонтальной
(наклонной) плоскостях и являются нормальными по отношению к
траектории полета ракеты перегрузками. Они зависят в основном от
величины подъемной и боковой сил.
Отношение переменной силы, необходимой для движения ракеты по
кинематической траектории к весу ракеты принято называть нормальной
кинематической перегрузкой, nк.
Нормальные кинематические перегрузки, которые должна развивать
ракета для движения по траектории метода наведения с заданной
точностью называются потребными перегрузками, nтр.
Потребные перегрузки определят требования к маневренным свойствам
ракеты, т.е. к её способности осуществлять криволинейные траектории.
20.
nтр= nk +nb + nфnk - кинематические перегрузки, определяемые реализуемым методом
наведения
nb - перегрузки веса
nф - флюктуационные, случайные перегрузки.
Реальная ракета обладает ограниченной маневренностью. Нормальные
силы, изменяющие направление движения ракеты, являются
аэродинамическими силами. При данной аэродинамической компановке
ракеты, наибольшая нормальная аэродинамическая сила может быть
получена при выдаче на рули ракеты максимальной команды управления.
Параметры перегрузки, возникающие на ракете при максимальной
команде управления, называются располагаемыми перегрузками, np.
Для наведения ракеты на цель с заданной точностью, располагаемые
перегрузки всегда должны быть больше требуемых (потребных):
21. 4-ый вопрос: Силы, действующие на ракету в полёте.
При полёте ракеты в атмосфере на неё действуют: силатяжести G, сила тяги двигателя P, полная аэродинамическая
сила R.
22.
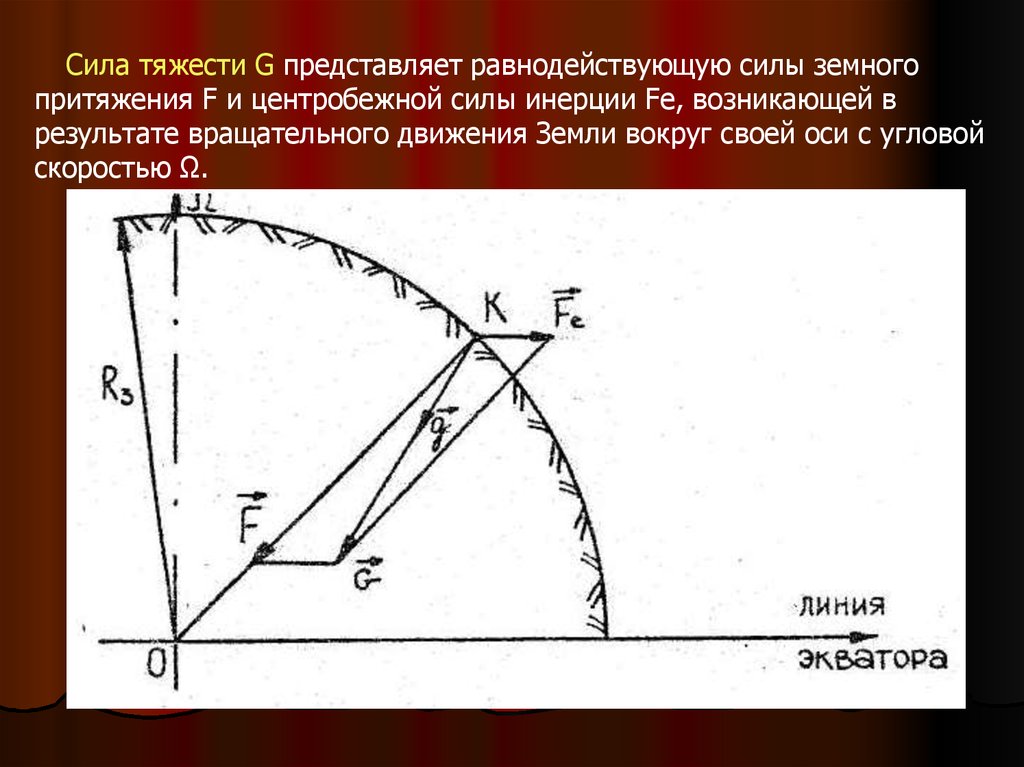
Сила тяжести G представляет равнодействующую силы земногопритяжения F и центробежной силы инерции Fе, возникающей в
результате вращательного движения Земли вокруг своей оси с угловой
скоростью Ω.
23.
При условии Fе<< F, G = mg. Масса ракеты меняется во времени.поэтому G(t) =m(t)g. При изучении движения ЗУР ускорение силы тяжести
g – const. по величине и направлена вертикально вниз к центру Земли. В
процессе полета ракеты сила тяжести изменяется только по величине,
вследствие изменения массы ракеты из-за выгорания топлива, т.е. ракета
является телом переменной массы.
Сила тяжести G рассчитывается по формуле
где
G0 - все ракеты перед стартом,
G1 - вес стартовых ускорителей,
Gc(t) - секундный весовой расход топлива,
t - текущее время.
24.
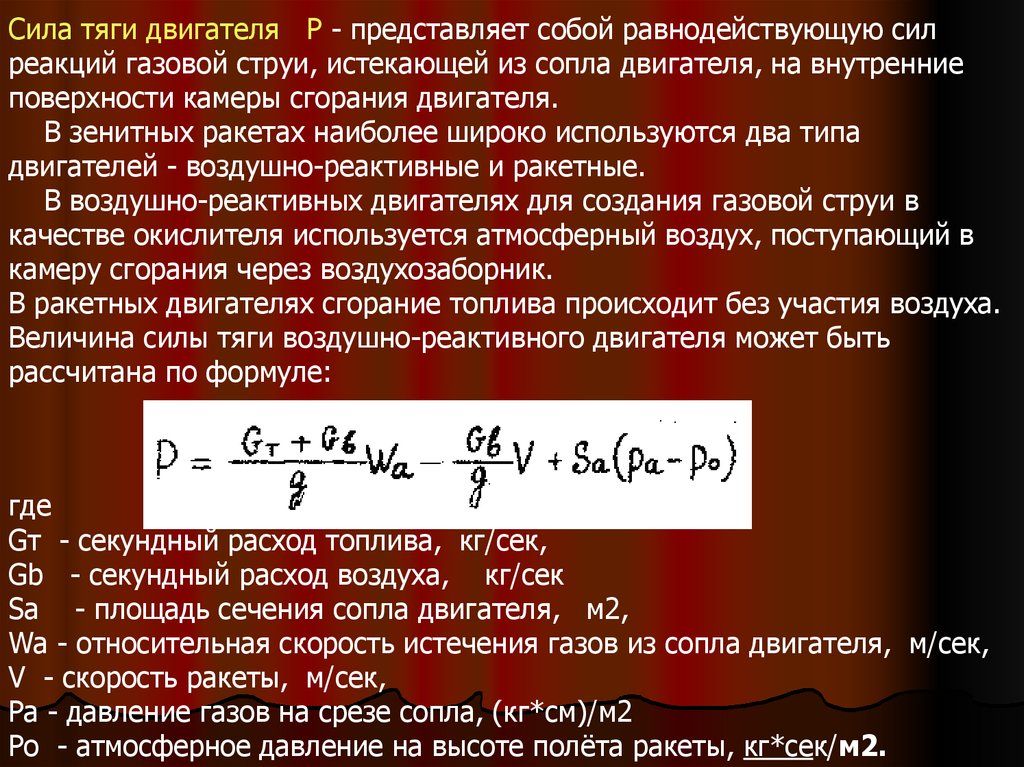
Сила тяги двигателя P - представляет собой равнодействующую силреакций газовой струи, истекающей из сопла двигателя, на внутренние
поверхности камеры сгорания двигателя.
В зенитных ракетах наиболее широко используются два типа
двигателей - воздушно-реактивные и ракетные.
В воздушно-реактивных двигателях для создания газовой струи в
качестве окислителя используется атмосферный воздух, поступающий в
камеру сгорания через воздухозаборник.
В ракетных двигателях сгорание топлива происходит без участия воздуха.
Величина силы тяги воздушно-реактивного двигателя может быть
рассчитана по формуле:
где
Gт - секундный расход топлива, кг/сек,
Gb - секундный расход воздуха, кг/сек
Sа - площадь сечения сопла двигателя, м2,
Wa - относительная скорость истечения газов из сопла двигателя, м/сек,
V - скорость ракеты, м/сек,
Pa - давление газов на срезе сопла, (кг*см)/м2
Po - атмосферное давление на высоте полёта ракеты, кг*сек/м2.
25.
Для ракетного двигателя сила тяги P определяется по формуле :Сила тяги ракетного двигателя возрастает с увеличением
относительной скорости истечения газов Wа и секундного весового
расхода топлива Gt. Современные зенитные управляемые ракеты имеют
либо стартовый и маршевый двигатели, либо двухрежимный двигатель.
Разгон ракеты осуществляется большой силой тяги, во много раз
превосходящей вес ракеты. После сброса ускорителей или окончания
первого режима работы двухрежимного двигателя полет ракеты
происходит под действием значительно меньшей силы тяги.
При изучении движения ЗУР принято, что сила тяги приложена к центру
масс и направлена вдоль продольной оси ракеты, хотя в действительности
имеют место отклонения линии действия силы Р от продольной оси
ракеты.
26.
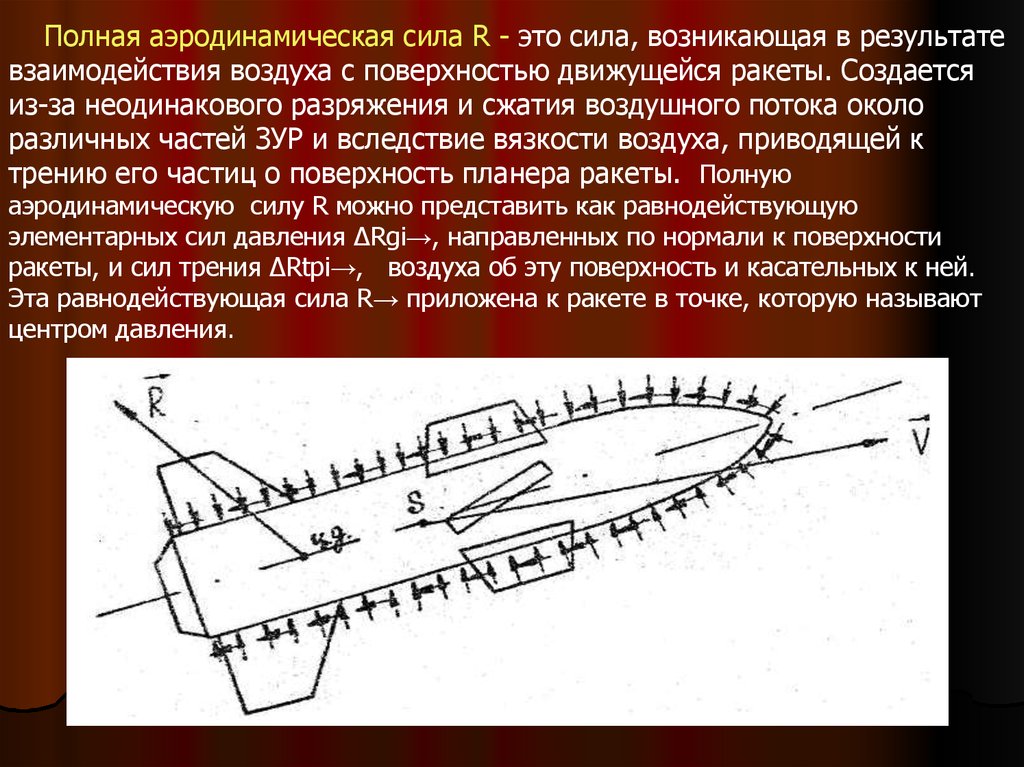
Полная аэродинамическая сила R - это сила, возникающая в результатевзаимодействия воздуха с поверхностью движущейся ракеты. Создается
из-за неодинакового разряжения и сжатия воздушного потока около
различных частей ЗУР и вследствие вязкости воздуха, приводящей к
трению его частиц о поверхность планера ракеты. Полную
аэродинамическую силу R можно представить как равнодействующую
элементарных сил давления ΔRgi→, направленных по нормали к поверхности
ракеты, и сил трения ΔRtpi→, воздуха об эту поверхность и касательных к ней.
Эта равнодействующая сила R→ приложена к ракете в точке, которую называют
центром давления.
27.
Величина полной аэродинамической силы R зависит от формы и размеров ракеты, скорости её полета, свойств атмосферы и положения корпусаракеты относительно набегающего потока воздуха. Перечисленные выше
факторы в процессе полета ЗУР изменяются, что приводит к изменению
величины и направления полной аэродинамической силы R→,а также
точки её приложения.
Величина полной аэродинамической силы определяется известной
из аэродинамики формулой
R=Cr× q× Skp
Cr- безразмерный аэродинамический коэффициент,
q- скоростной напор, равный q =ρV2/2 (кг/м2 )
ρ - массовая плотность воздуха кг*сек2/м4
Skp - характерная площадь крыла, м2.
С увеличением высоты полета уменьшается и величина полной
аэродинамической силы.
Так как величина, направление и точка приведения полной
аэродинамической сипы в процессе полёта изменяются, то с целью
удобства изучения влияния этой силы на движение ракеты её переносят в
центр масс и раскладывают на составляющие по осям скоростной системы
координат.
28.
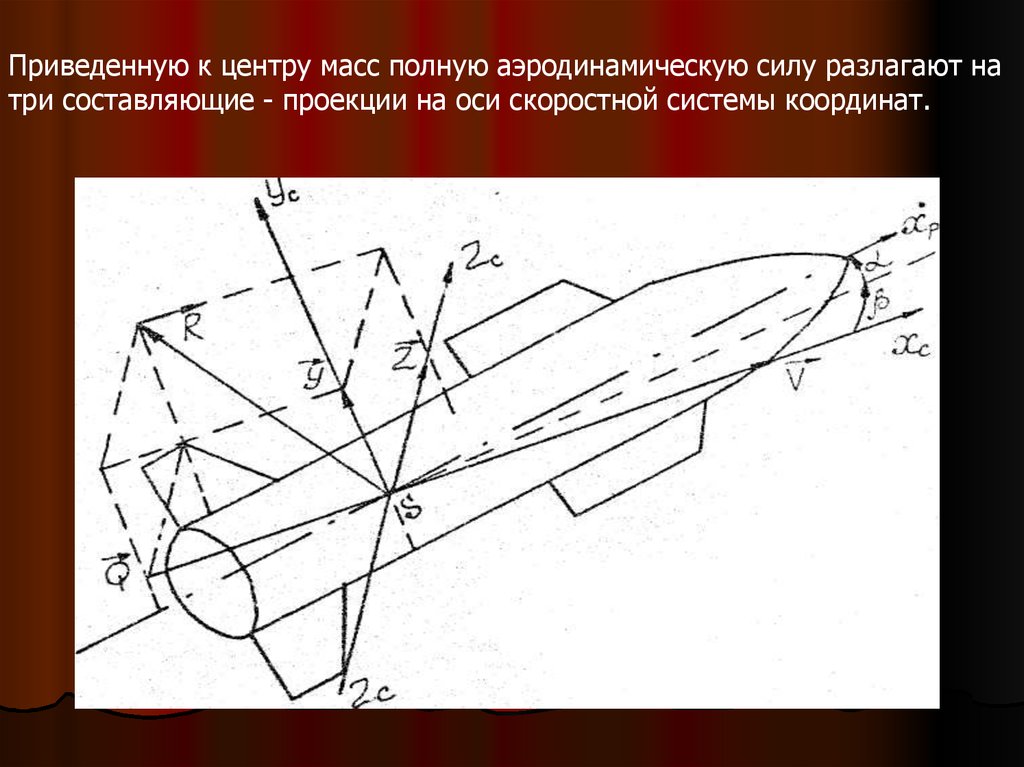
Приведенную к центру масс полную аэродинамическую силу разлагают натри составляющие - проекции на оси скоростной системы координат.
29.
Проекция полной аэродинамической силы на ось SXc направлена всторону, противоположную вектору скорости ракеты Т, и называется
лобовым сопротивлением Q→. Проекция на ось SУс называется подъемной
силой У→, а проекция на ось SZc - боковой силой Z→.
R = Q + Y + Z
где: Cx, Сy, Cz - коэффициенты аэродинамических сил лобового
сопротивления, подъемной силы и боковой силы.
30.
Лобовое сопротивление Q→ действует в направленииуменьшения скорости ракеты. Для его преодоления
расходуется анергия двигательной установки. Чем меньше
Q→, тем больше при прочих одинаковых условиях дальность
полета ЗУР, которая в значительной степени определяет
положение дальней границы зоны поражения. Поэтому
всегда при создании ракет, путем выбора формы и других
конструктивных характеристик ЗУР, стремятся уменьшить
величину их лобового сопротивления.
Величина силы лобового сопротивления существенно
зависит от коэффициента Сx,который в свою очередь
зависит, в основном, от форм и размеров ракеты, числа М
=V/a, углов атаки α и скольжения β и углов отклонения
органов управления δ, и определяется экспериментально.
С увеличением высоты полета величина лобового
сопротивления падает.
31.
Подъемная Y и боковая Z силы лежат в плоскости, перпендикулярнойвектору скорости ракеты, и представляет собой нормальные силы. Они не
изменяют величины вектора V→, а влияют только на его направление.
Подъемная сила Y→ влияет на направление полета ракеты в вертикальной
плоскости, а боковая сила Z→ - на направление полета в горизонтальной
плоскости. Чем больше они по величине, тем больше возможности ракеты
изменять направление полета. Значит, эти силы могут быть использованы для
управления движением ракеты. Изменяя величины сил Y→ и Z→, представляется
возможным наводить ракету на цель. Величина подъемной силы Y
существенно зависит от коэффициента Су→.
Су=Суα α + Cyσ δв
где Суα , Cyσ – коэффициенты пропорциональности, характеризующие
приращение коэффициента подъемной силы Су, при изменении
соответственно угла атаки α и угла отклонения органа управления δв по
высоте на единицу и зависящие от числа М.
Формулу для подъемной силы можно записать в виде:
32.
Вводя обозначение, где Уα α - составляющая подъемной силы от αYδ δв - составляющая подъемной силы от δв.
При одинаковых условиях полёта ракеты типа "утка" и "поворотное
крыло", у которых органы управления расположены впереди центра масс,
при одном и том же угле поворота органов управления δв могут создать
большую величину подъемной силы Y, чем ракета нормальной
аэродинамической схемы.