




 и система создания управляющей силы (ССУС) предназначены для вывода ракеты в точку встречи с целью.")


















 warfare
warfareSimilar presentations:










Авиационные управляемые средства поражения
1. Авиационные управляемые средства поражения
Авиационныеуправляемые
средства
поражения
2. Авиационные управляемые ракеты
3.
Общая характеристика авиационных управляемых средствпоражения (АУСП)
1. Назначение, состав АУСП
2. Классификация АУСП
3. Основные характеристика АУСП
4. Методы наведения АУСП
4.
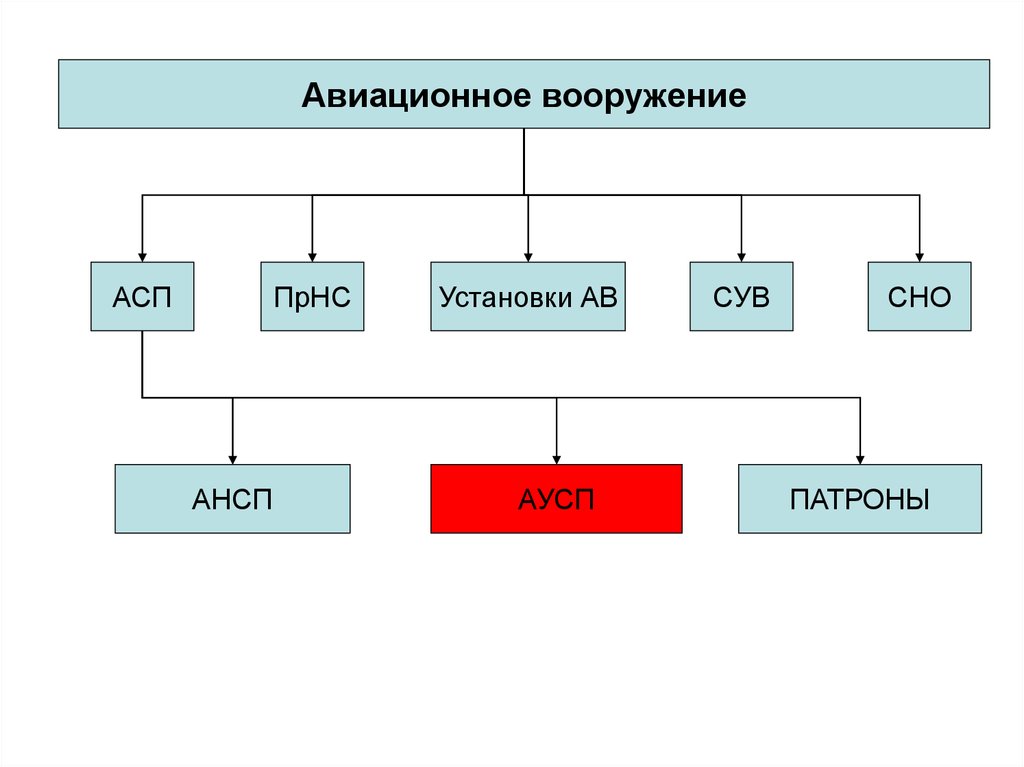
Авиационное вооружениеАСП
ПрНС
АНСП
Установки АВ
АУСП
СУВ
СНО
ПАТРОНЫ
5. Функциональная схема типовой АУР
Взрывательноеустройство
Боевая часть
Система управления
Двигательная
установка
Система создания
управляющей силы
Система
энергоснабжения
Электросистема
6. Предназначение составных частей АУР
• Боевая часть - предназначена для нанесения ущерба цели привоздействии на цель своими поражающими факторами.
БЧ для поражения воздушных целей
осколочно - фугасная
стержневая
7.
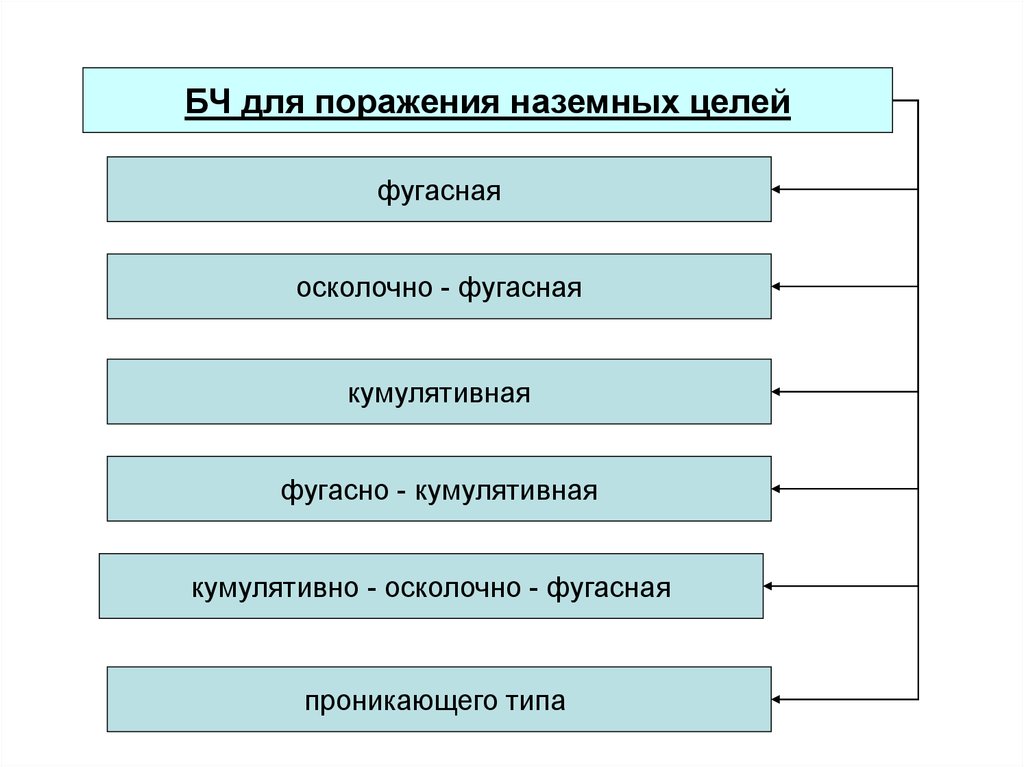
БЧ для поражения наземных целейфугасная
осколочно - фугасная
кумулятивная
фугасно - кумулятивная
кумулятивно - осколочно - фугасная
проникающего типа
8. Взрывательное устройство - обеспечивает подрыв боевой части.
Состав взрывательного устройстваконтактный взрыватель
неконтактный взрыватель
предохранительно-исполнительный механизм
9. Система управления (СУ) и система создания управляющей силы (ССУС) предназначены для вывода ракеты в точку встречи с целью.
10. Двигательная установка ракеты предназначена для создания силы тяги, в результате действия которой обеспечивается необходимая
скорость полета ракеты.Состав двигательной установки
двигатель
емкости с запасом топлива
агрегаты изменяющие режим работы
агрегаты, осуществляющие запуск двигателя
11. Система энергоснабжения обеспечивает энергией все системы ракеты после пуска.
Системы энергоснабжениябортовые источники электроэнергии
пневмосистема
гидросистема
12. Электросистема предназначена для объединения всех систем и агрегатов ракеты в единый функционирующий механизм
Электросистемаэлектропроводные соединения
коммутационная аппаратура
связь систем АУР с системой носителя
13. 2. Классификация авиационных управляемых ракет
АУР классифицируются по:месту расположения цели;
назначению;
дальности стрельбы;
типу системы управления;
типу боевой части;
типу системы создания управляющей силы;
типу двигателя.
14.
По месту расположения целейАУР класса "воздух- воздух"
АУР класса “воздух-поверхность”
15. По назначению:
тактические;
• оперативно-тактические;
• стратегические.
АУР «В-В»
АУР «В-П»
оперативно-тактические
тактические
стратегические
16. По дальности стрельбы:
АУР класса « воздух-воздух»Малой дальности ( < 15 км )
Средней дальности ( < 50 км )
Большой дальности ( > 50 км )
17. По дальности стрельбы:
АУР класса «воздух - поверхность»Малой дальности ( < 100 км )
Средней дальности ( < 1000 км )
Большой дальности ( > 1000 км )
18.
По типу системы управления:автономного управления
телеуправления
самонаведения
комбинированная
19.
По способу созданияуправляющей силы:
аэродинамическая
газодинамическая
аэрогазодинамическая
20.
Аэродинамические схемы ракетНормальная
Элевонная (безхвостка)
Обратная (утка)
С поворотным крылом
21. 3. Основные характеристики авиационных управляемых ракет
Тактико-технические характеристики АУР:назначение;
типы ЛА, с которых применяются АУР;
допустимые условия применения;
стартовая масса и геометрические размеры;
тип и масса боевой части;
тип системы управления;
тип двигателя;
максимальная управляющая перегрузка;
время управляемого полета;
точностные характеристики АУР.
22. Эксплуатационные характеристики АУР:
• состояние поставки от предприятийпромышленности;
• допустимые условия эксплуатации;
• гарантийный ресурс;
• межрегламентный ресурс;
• тип позиции предварительной подготовки ракет;
• трудозатраты на подготовку ракеты к боевому
применению.
23. 4. Методы наведения АУР
Методы наведения самонаводящихся АУР:прямого наведения;
погони (флюгерный);
наведение с заданным углом пеленга;
пропорционального наведения (пропорциональной
навигации).
24. Схема основных векторных величин, определяющих положение центра масс АУР
XDY0
Ц
D
Vp
X1
Ц
Z0 М
X0
25.
• V ð - скорость ракеты;• D - вектор дальности до цели;
• X 1 - строительная ось ракеты;
- угол, определяющий положение D в вертикальной
плоскости - угол возвышения цели; (бортовой угол
места цели),
- угол, определяющий положение D в
горизонтальной плоскости - бортовой угол;
• - угол тангажа;
• - курсовой угол (угол рыскания);
• - угол, определяющий положение вектора V ð в
вертикальной плоскости,
• - угол, определяющий положение вектора V ð в
горизонтальной плоскости.
26. Метод прямого наведения
Необходимо, чтобы в процессе полета ракеты ее продольная осьOX совпадала с линией ракета - цель вектора D. В противном
случае будет иметь место ошибка рассогласования:
1
1
- параметр управления по вертикали (1-й канал управления)
Параметр управления по горизонту (2- канал управления):
2 ( ) cos
Достоинство метода: простота реализации данного метода.
Недостаток метода: резкое увеличение требуемых нормальных
перегрузок при приближении АУР к цели.
27. Метод погони
Вектор скорости ракеты V ð направлен на цель по линии ракета –цель (по вектору D).
Параметры управления определяются из следующих уравнений
(см. схему основных векторных величин, определяющих положение
центра масс АУР ):
•по вертикали (1-й канал)
1
•по горизонту (2-й канал)
2 ( ) cos
Недостаток метода: резкое возрастание требуемых нормальных
перегрузок по мере приближения ракеты к движущийся цели и
невозможность наведения в упрежденную точку встречи с
движущейся целью из-за больших значений промаха.
28. Наведение с заданным углом пеленга
Угол между OX (продольной осью ракеты) и вектором D равензаданному значению.
Уравнения связи:
ÏÂ 0;
ÏÂ 0.
ÏÂ , ÃÏ
-
заданные
значения углов
пеленга цели в
вертикальной и
горизонтальной
плоскостях
Метод наведения с заданным углом пеленга
29. Метод пропорционального наведения
Вектор D в процессе наведения ракеты не должен вращаться.Скалярные уравнения
связи:
0
0
Схема сближения
ракеты с целью в
вертикальной
плоскости
30.
Достоинства метода:• сравнительная простота (для формирования параметра
управления достаточно иметь измеритель угловой скорости
вектора дальности ракета - цель);
• потребная кривизна траектории получается значительно
меньше, чем у других методов;
• позволяет АУР успешно поражать сильно маневрирующие цели
на разных высотах и ракурсах.