












 warfare
warfareSimilar presentations:





")




Навигационное оборудование бронеобъектов
1. Военная кафедра НИУ ВШЭ
Тема 37/2 : Навигационное оборудованиебронеобъектов.
1
2. УЧЕБНЫЕ ВОПРОСЫ:
1.Подготовка рабочей карты для работы снавигационной аппаратурой. Способ и порядок
решения навигационных задач.
Способ и порядок решения навигационных задач.
Работа на аппаратуре в особых условиях.
Техническое обслуживание ТНА
2
3. Подготовка аппаратуры к работе заключается
- в изучении маршрута движения и оформлениеего на карте;
- в подготовке исходных данных;
- первоначальном ориентировании (определении
дирекционного угла объекта);
- вводе исходных данных в
аппаратуру;
- в установке топографической карты в планшет.
3
4. Подготовка рабочей карты для работы на ТНА.
Подготовка рабочей карты дляработы на ТНА.
- исходный пункт, пункт назначения и подписывают их полные прямоугольные
координаты;
- маршрут движения и расстояние в км до контрольных точек от исходного
пункта;
- контрольные точки:
- первую по маршруту намечают в 2-3 км от исходного пункта
и используют в качестве контрольной точки для контроля работы аппаратуры;
- затем по всему маршруту примерно через 20-30 км;
и подписывают сокращенные координаты из пяти цифр, которые будут на
счетчиках Х и У при наезде на эти контрольные точки;
- дирекционные углы на видимые ориентиры и на пункт назначения с
контрольных точек для контроля работы аппаратуры в процессе марша и
уточнения текущих координат;
- где ориентирование затруднено и направление движения придется выдерживать
по курсоуказателю, определяют и подписывают дирекционные углы
4
направлений.
5. Подготовка рабочей карты для работы на ТНА.
Подготовка рабочей карты дляработы на ТНА.
- координат исходного пункта Хисх, Уисх и пункта назначения Хпн,
Упн;
- разностей координат между пунктом назначения и исходным пунктом: Х = Хпн –
Хисх и У = Упн – Уисх;
- дирекционного угла продольной оси машины - исх;
- величины корректуры пути;
Величину корректуры пути определяют контрольным проездом измеренного мерной
лентой прямолинейного участка маршрута на местности, характерной для района
предстоящих действий. Отсчет, который необходимо установить на шкале
КОРРЕКТУРА ПУТИ, рассчитывают по формуле:
Х-S
К=
100 %
S
Х- отсчет по счетчику Х координатора после проезда измеренного участка, если на
координаторе были установлены отсчеты Хисх = 0 и исх = 0 - 00 ;
S- длина участка маршрута, измеренного мерной лентой.
В качестве исходного пункта следует выбирать контурные точки местности
(мосты, памятники, железнодорожные переезды...)
5
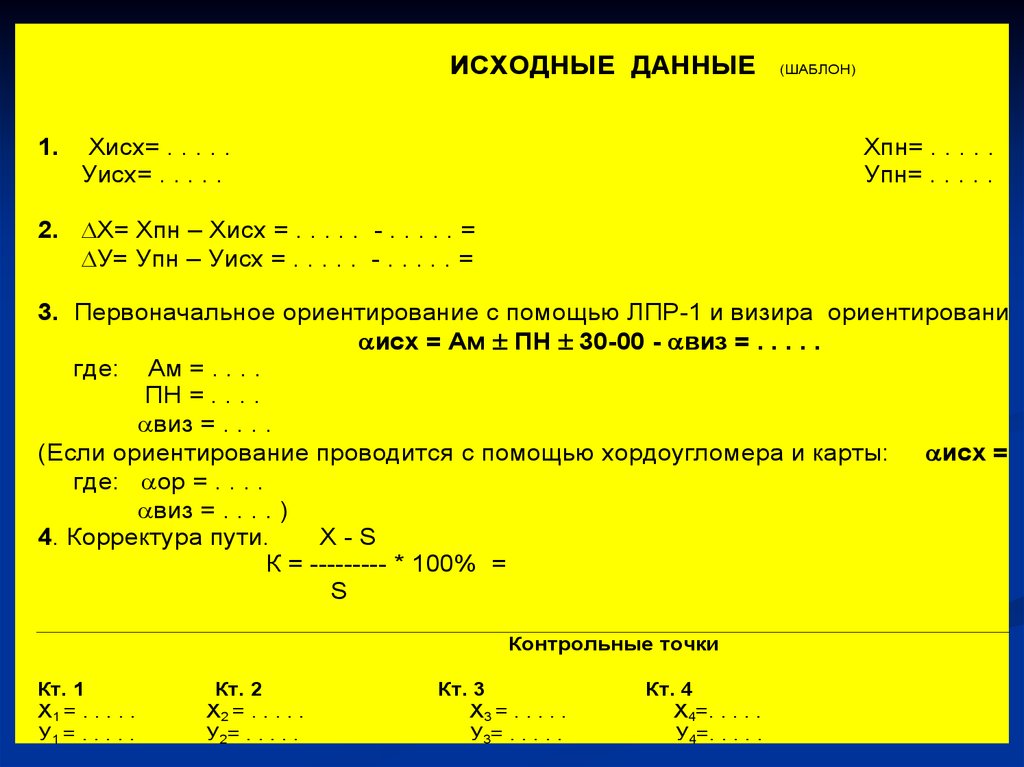
6.
ИСХОДНЫЕ ДАННЫЕ1.
Хисх= . . . . .
Уисх= . . . . .
(ШАБЛОН)
Хпн= . . . . .
Упн= . . . . .
2. Х= Хпн – Хисх = . . . . . - . . . . . =
У= Упн – Уисх = . . . . . - . . . . . =
3. Первоначальное ориентирование с помощью ЛПР-1 и визира ориентирования:
исх = Ам ПН 30-00 - виз = . . . . .
где: Ам = . . . .
ПН = . . . .
виз = . . . .
(Если ориентирование проводится с помощью хордоугломера и карты:
исх =
где: ор = . . . .
виз = . . . . )
4. Корректура пути.
Х-S
К = --------- * 100% =
S
Контрольные точки
Кт. 1
Х1 = . . . . .
У1 = . . . . .
Кт. 2
Х2 = . . . . .
У2= . . . . .
Кт. 3
Х3 = . . . . .
У3= . . . . .
Кт. 4
Х4=. . . . .
У4=. . . . .
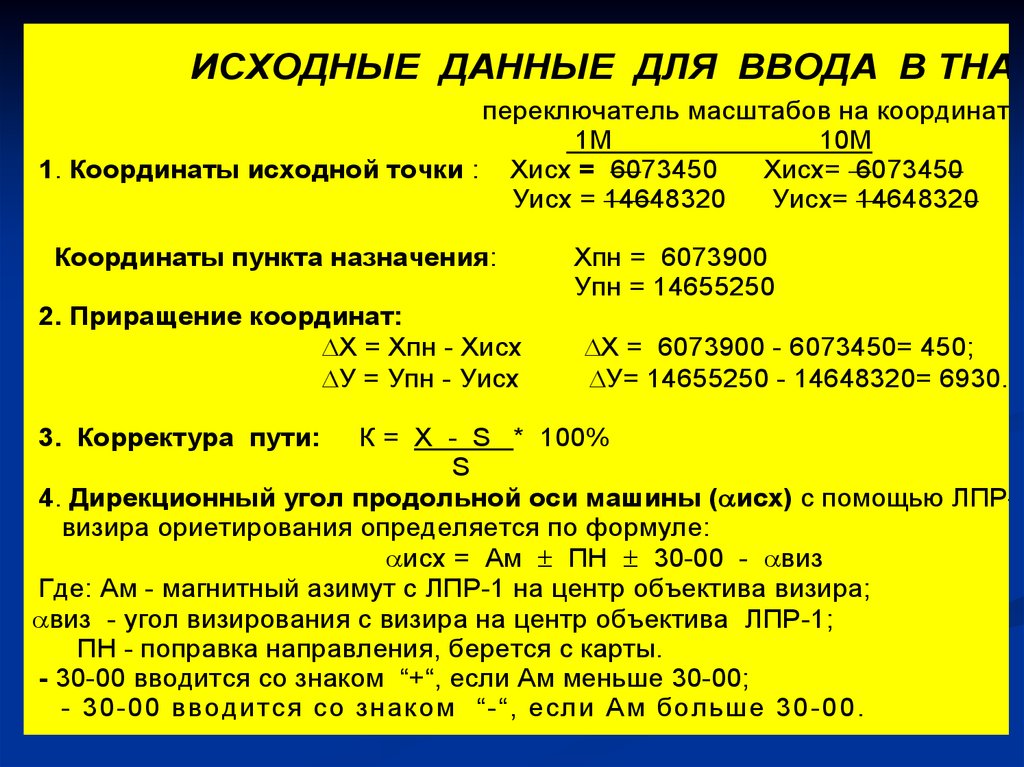
7.
ИСХОДНЫЕ ДАННЫЕ ДЛЯ ВВОДА В ТНАпереключатель масштабов на координатор
1М
10М
1. Координаты исходной точки : Хисх = 6073450
Хисх= 6073450
Уисх = 14648320
Уисх= 14648320
Координаты пункта назначения:
2. Приращение координат:
Х = Хпн - Хисх
У = Упн - Уисх
3. Корректура пути:
Хпн = 6073900
Упн = 14655250
Х = 6073900 - 6073450= 450;
У= 14655250 - 14648320= 6930.
К = Х - S * 100%
S
4. Дирекционный угол продольной оси машины ( исх) с помощью ЛПР-1
визира ориетирования определяется по формуле:
исх = Ам ПН 30-00 - виз
Где: Ам - магнитный азимут с ЛПР-1 на центр объектива визира;
виз - угол визирования с визира на центр объектива ЛПР-1;
ПН - поправка направления, берется с карты.
- 30-00 вводится со знаком “+“, если Ам меньше 30-00;
- 30-00 вводится со знаком “-“, если Ам больше 30-00.
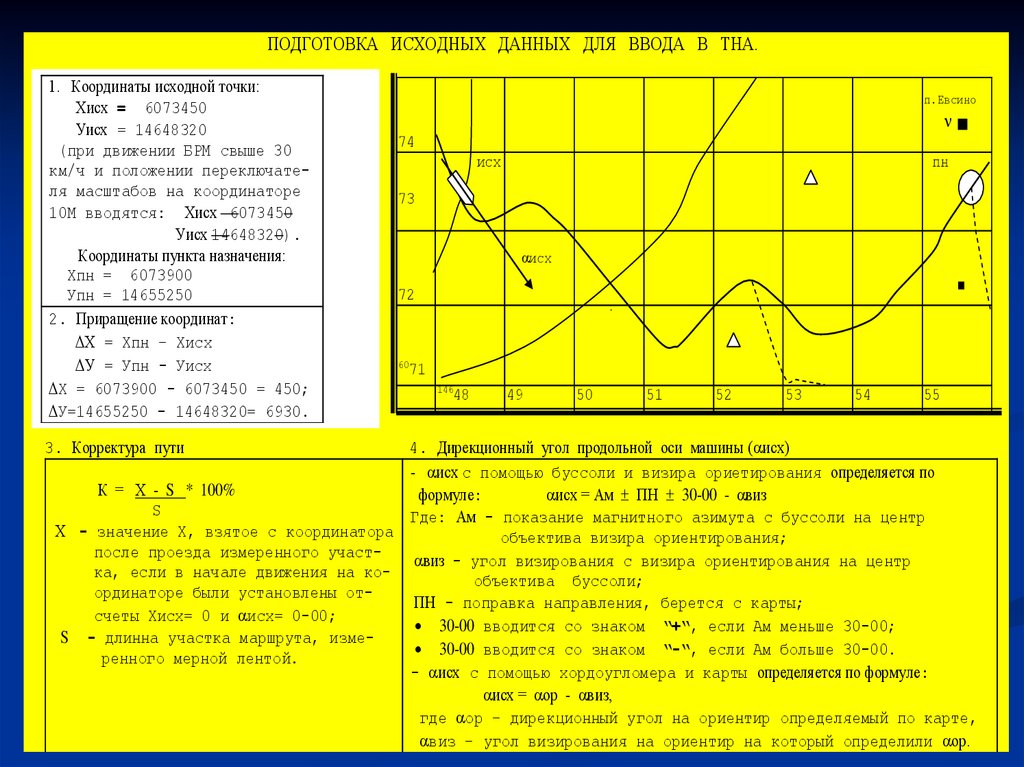
8.
ПОДГОТОВКА ИСХОДНЫХ ДАННЫХ ДЛЯ ВВОДА В ТНА.1. Координаты исходной точки:
Хисх = 6073450
Уисх = 14648320
(при движении БРМ свыше 30
км/ч и положении переключателя масштабов на координаторе
10М вводятся: Хисх 6073450
Уисх 14648320).
Координаты пункта назначения:
Хпн = 6073900
Упн = 14655250
2. Приращение координат:
Х = Хпн – Хисх
У = Упн - Уисх
Х = 6073900 - 6073450 = 450;
У=14655250 - 14648320= 6930.
3. Корректура пути
п.Евсино
74
исх
пн
73
исх
72
60
71
146
48
49
50
51
52
53
54
55
4. Дирекционный угол продольной оси машины ( исх)
- исх с помощью буссоли и визира ориетирования определяется по
К = Х - S * 100%
формуле:
исх = Ам ПН 30-00 - виз
S
Где: Ам - показание магнитного азимута с буссоли на центр
Х - значение Х, взятое с координатора
объектива визира ориентирования;
после проезда измеренного участ виз - угол визирования с визира ориентирования на центр
ка, если в начале движения на кообъектива буссоли;
ординаторе были установлены отПН - поправка направления, берется с карты;
счеты Хисх= 0 и исх= 0-00;
30-00 вводится со знаком “+“, если Ам меньше 30-00;
S - длинна участка маршрута, изме 30-00 вводится со знаком “-“, если Ам больше 30-00.
ренного мерной лентой.
- исх с помощью хордоугломера и карты определяется по формуле:
исх = ор - виз,
где ор – дирекционный угол на ориентир определяемый по карте,
виз – угол визирования на ориентир на который определили ор.
9. ОПРЕДЕЛЕНИЕ ИСХОДНОГО ДИРЕКЦИОННОГО УГЛА ОБЪЕКТА
Дирекционный угол машины ( исх) можноопределить:
- с помощью гирокомпаса (1Г11, 1Г25...);
- по топографической карте с помощью
хордоугломера;
- с помощью буссоли ПАБ-2А;
- по каталогам координат геодезических пунктов;
- по звездам при помощи азимутальной насадки АНБ-1
буссоли;
- путем решения обратной геодезической задачи.
9
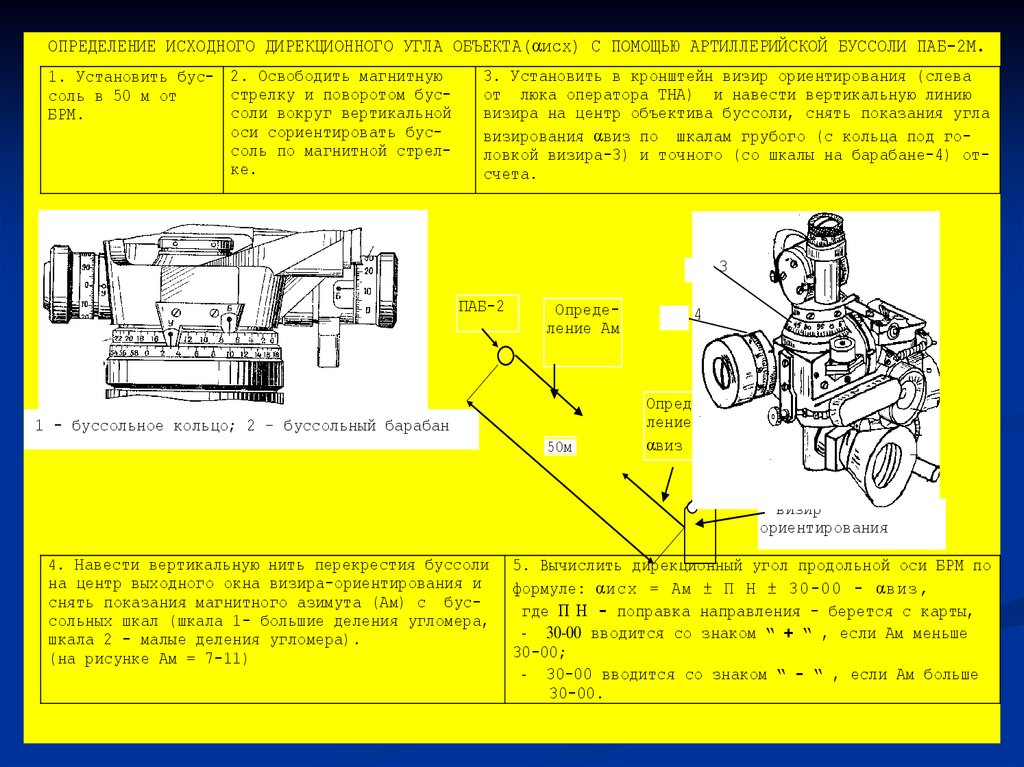
10.
ОПРЕДЕЛЕНИЕ ИСХОДНОГО ДИРЕКЦИОННОГО УГЛА ОБЪЕКТА( исх) С ПОМОЩЬЮ АРТИЛЛЕРИЙСКОЙ БУССОЛИ ПАБ-2М.1. Установить бус- 2. Освободить магнитную
стрелку и поворотом буссоль в 50 м от
соли вокруг вертикальной
БРМ.
оси сориентировать буссоль по магнитной стрелке.
3. Установить в кронштейн визир ориентирования (слева
от люка оператора ТНА) и навести вертикальную линию
визира на центр объектива буссоли, снять показания угла
визирования виз по шкалам грубого (с кольца под головкой визира-3) и точного (со шкалы на барабане-4) отсчета.
3
ПАБ-2
Определение Ам
1 - буссольное кольцо; 2 – буссольный барабан
50м
4
Определение
виз
визир
ориентирования
4. Навести вертикальную нить перекрестия буссоли
на центр выходного окна визира-ориентирования и
снять показания магнитного азимута (Ам) с буссольных шкал (шкала 1- большие деления угломера,
шкала 2 - малые деления угломера).
(на рисунке Ам = 7-11)
5. Вычислить дирекционный угол продольной оси БРМ по
формуле: и с х = А м П Н 3 0 - 0 0 - в и з ,
где П Н - поправка направления - берется с карты,
- 30-00 вводится со знаком “ + “ , если Ам меньше
30-00;
- 30-00 вводится со знаком “ - “ , если Ам больше
30-00.
11.
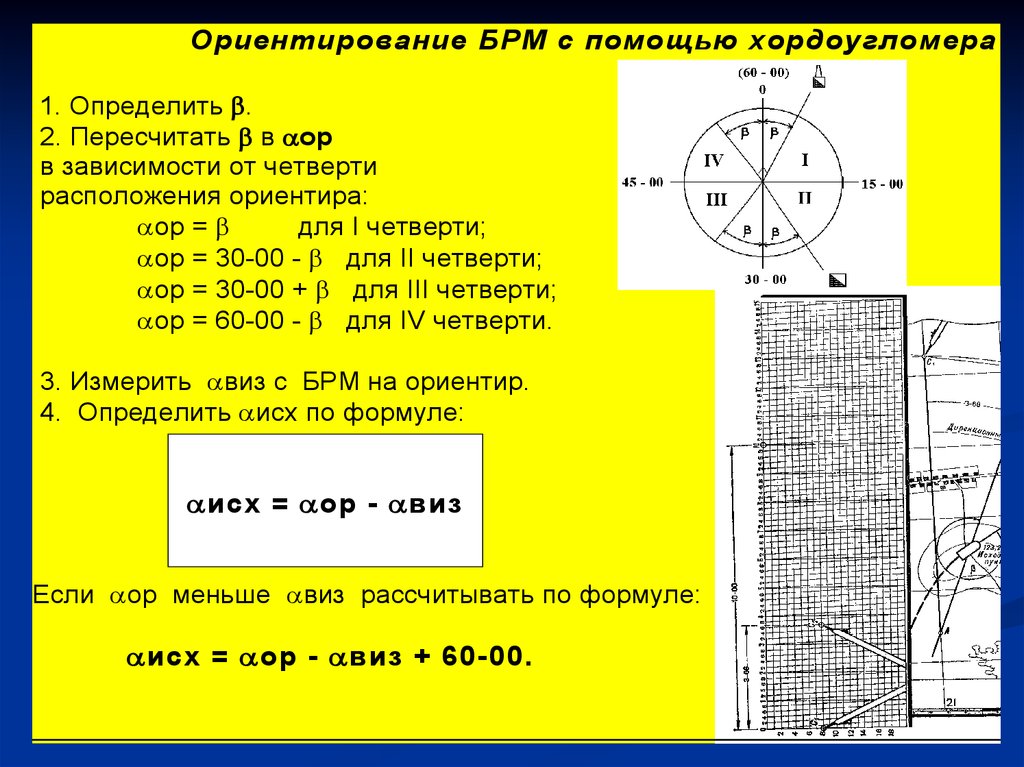
Ориентирование БРМ с помощью хордоугломера1. Определить .
2. Пересчитать в ор
в зависимости от четверти
расположения ориентира:
ор =
для I четверти;
ор = 30-00 - для II четверти;
ор = 30-00 + для III четверти;
ор = 60-00 - для IV четверти.
3. Измерить виз с БРМ на ориентир.
4. Определить исх по формуле:
исх = ор - виз
Если ор меньше виз рассчитывать по формуле:
исх = ор - виз + 60-00.
12.
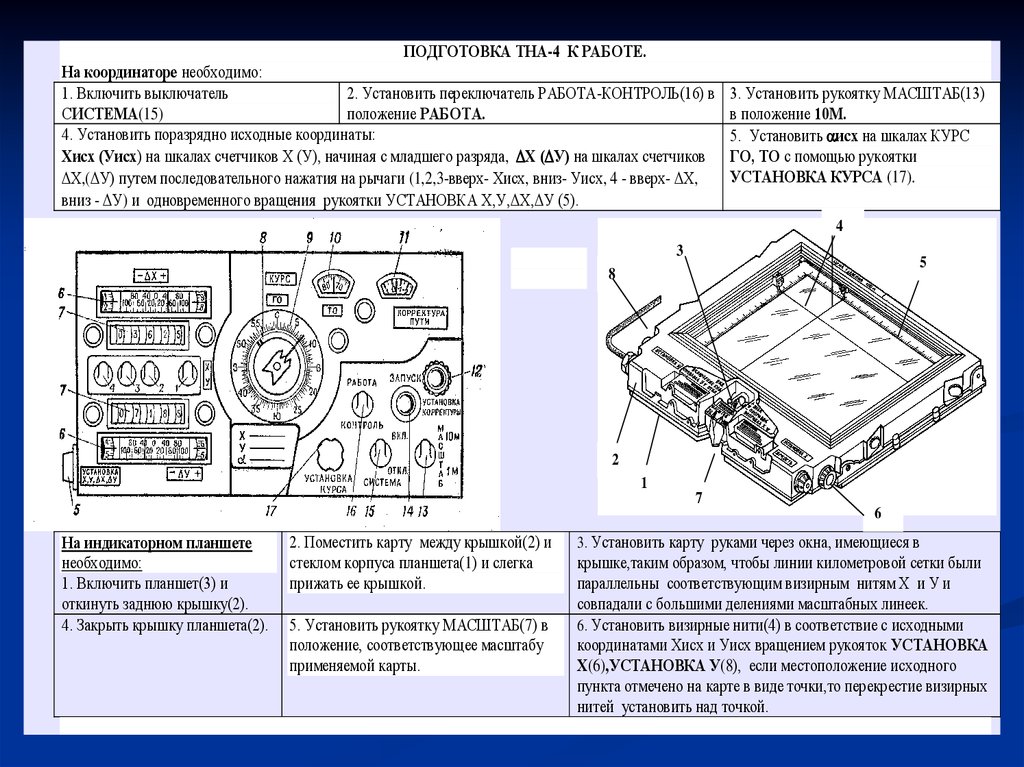
ПОДГОТОВКА ТНА-4 К РАБОТЕ.На координаторе необходимо:
1. Включить выключатель
2. Установить переключатель РАБОТА-КОНТРОЛЬ(16) в
СИСТЕМА(15)
положение РАБОТА.
4. Установить поразрядно исходные координаты:
Хисх (Уисх) на шкалах счетчиков Х (У), начиная с младшего разряда, Х ( У) на шкалах счетчиков
Х,( У) путем последовательного нажатия на рычаги (1,2,3-вверх- Хисх, вниз- Уисх, 4 - вверх- Х,
вниз - У) и одновременного вращения рукоятки УСТАНОВКА Х,У, Х, У (5).
3. Установить рукоятку МАСШТАБ(13)
в положение 10М.
5. Установить исх на шкалах КУРС
ГО, ТО с помощью рукоятки
УСТАНОВКА КУРСА (17).
4
3
5
8
2
1
7
6
На индикаторном планшете
необходимо:
1. Включить планшет(3) и
откинуть заднюю крышку(2).
4. Закрыть крышку планшета(2).
2. Поместить карту между крышкой(2) и
стеклом корпуса планшета(1) и слегка
прижать ее крышкой.
5. Установить рукоятку МАСШТАБ(7) в
положение, соответствующее масштабу
применяемой карты.
3. Установить карту руками через окна, имеющиеся в
крышке,таким образом, чтобы линии километровой сетки были
параллельны соответствующим визирным нитям Х и У и
совпадали с большими делениями масштабных линеек.
6. Установить визирные нити(4) в соответствие с исходными
координатами Хисх и Уисх вращением рукояток УСТАНОВКА
Х(6),УСТАНОВКА У(8), если местоположение исходного
пункта отмечено на карте в виде точки,то перекрестие визирных
нитей установить над точкой.
13.
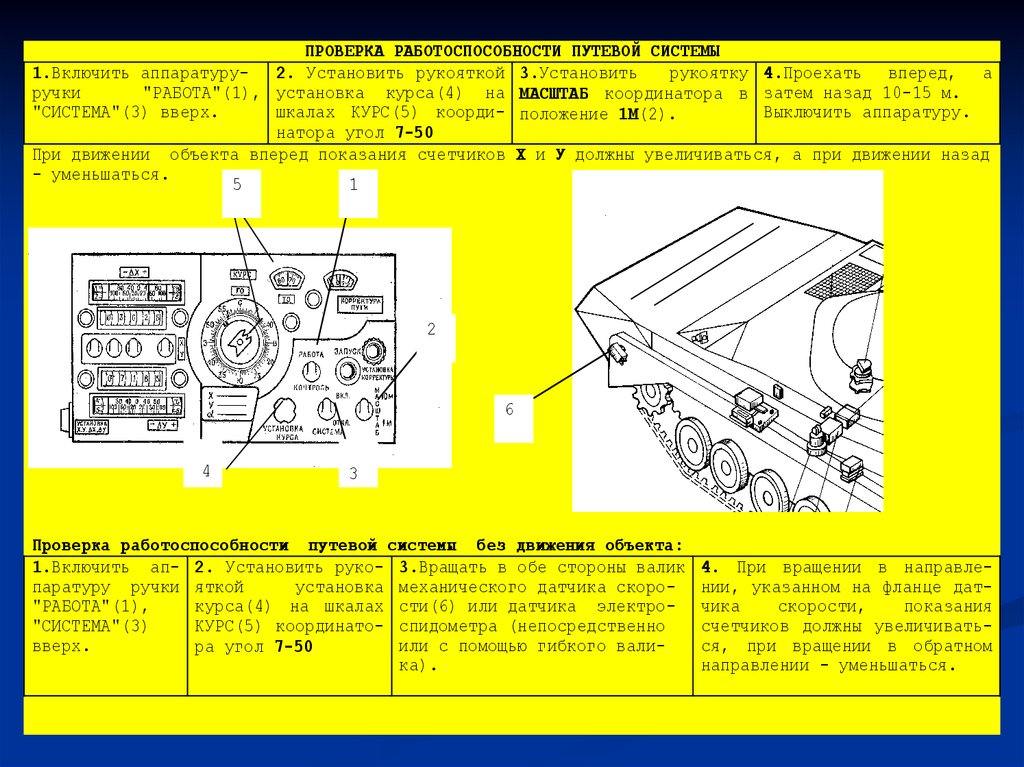
ПРОВЕРКА РАБОТОСПОСОБНОСТИ ПУТЕВОЙ СИСТЕМЫ1.Включить аппаратуру- 2. Установить рукояткой 3.Установить
рукоятку 4.Проехать вперед, а
ручки
"РАБОТА"(1), установка курса(4) на МАСШТАБ координатора в затем назад 10-15 м.
"СИСТЕМА"(3) вверх.
шкалах КУРС(5) коорди- положение 1М(2).
Выключить аппаратуру.
натора угол 7-50
При движении объекта вперед показания счетчиков Х и У должны увеличиваться, а при движении назад
- уменьшаться.
5
1
2
6
4
3
Проверка работоспособности путевой системы без движения объекта:
1.Включить ап- 2. Установить руко- 3.Вращать в обе стороны валик
паратуру ручки яткой
установка механического датчика скоро"РАБОТА"(1),
курса(4) на шкалах сти(6) или датчика электро"СИСТЕМА"(3)
КУРС(5) координато- спидометра (непосредственно
вверх.
или с помощью гибкого валира угол 7-50
ка).
4. При вращении в направлении, указанном на фланце датчика
скорости,
показания
счетчиков должны увеличиваться, при вращении в обратном
направлении - уменьшаться.
14.
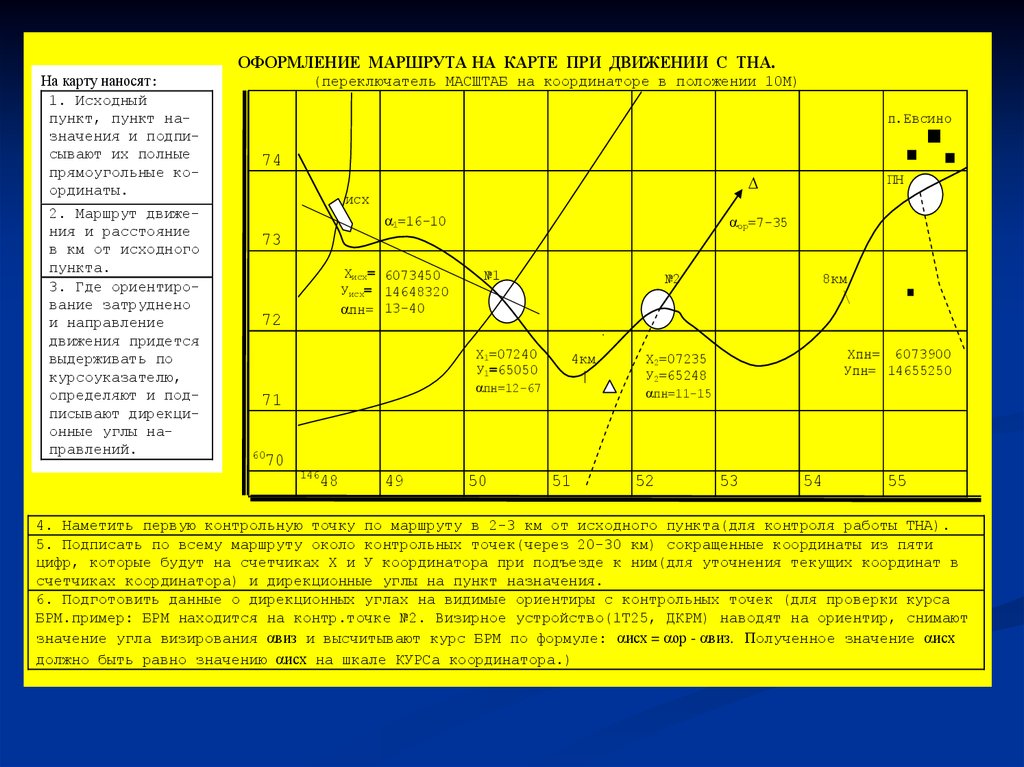
На карту наносят: :1. Исходный
пункт, пункт назначения и подписывают их полные
прямоугольные координаты.
2. Маршрут движения и расстояние
в км от исходного
пункта.
3. Где ориентирование затруднено
и направление
движения придется
выдерживать по
курсоуказателю,
определяют и подписывают дирекционные углы направлений.
ОФОРМЛЕНИЕ МАРШРУТА НА КАРТЕ ПРИ ДВИЖЕНИИ С ТНА.
(переключатель МАСШТАБ на координаторе в положении 10М)
п.Евсино
74
исх
1=16-10
ор=7-35
73
Хисх= 6073450
Уисх= 14648320
пн= 13-40
72
№1
60
№2
8км
\
Х1=07240
У1=65050
4км
|
пн=12-67
71
ПН
Хпн= 6073900
Упн= 14655250
Х2=07235
У2=65248
пн=11-15
70
146
48
49
50
51
52
53
54
55
4. Наметить первую контрольную точку по маршруту в 2-3 км от исходного пункта(для контроля работы ТНА).
5. Подписать по всему маршруту около контрольных точек(через 20-30 км) сокращенные координаты из пяти
цифр, которые будут на счетчиках Х и У координатора при подъезде к ним(для уточнения текущих координат в
счетчиках координатора) и дирекционные углы на пункт назначения.
6. Подготовить данные о дирекционных углах на видимые ориентиры с контрольных точек (для проверки курса
БРМ.пример: БРМ находится на контр.точке №2. Визирное устройство(1Т25, ДКРМ) наводят на ориентир, снимают
значение угла визирования виз и высчитывают курс БРМ по формуле: исх = ор - виз. Полученное значение исх
должно быть равно значению исх на шкале КУРСа координатора.)
15. Первая навигационная задача
Первая навигационная задача - определение плоскихпрямоугольных геодезических координат X и Y
местоположения подвижного объекта и его
дирекционный угол;
Для решения первой навигационной задачи
используются параметры движения объекта:
скорость и дирекционный угол.
15
16. ПЕРВАЯ НАВИГАЦИОННАЯ ЗАДАЧА
Для решения задачи используютсяпараметры движения объекта:
скорость и дирекционный угол.
Принцип определения координат X и
Y местоположения объекта при его
движении по горизонтальному
участку сводится следующему:
Решение первой навигационной задачи
Условия:
Объект передвигается из точки 0 к точкам 1, 2 и т. д.
За малый промежуток времени Δt его скорость v и
дирекционный угол а остаются неизменными.
Криволинейный путь объекта можно заменить
прямолинейными участками ΔS1r, ΔS2r и т. д.
Приращения координат ΔХ и ΔY на этих участках
будут равны:
Координаты объекта в любой момент могут быть
получены
алгебраическим
суммированием
исходных координат Хисх и Yисх с приращениями
координат ∑ΔХi, и ∑ΔYi, то есть:
17.
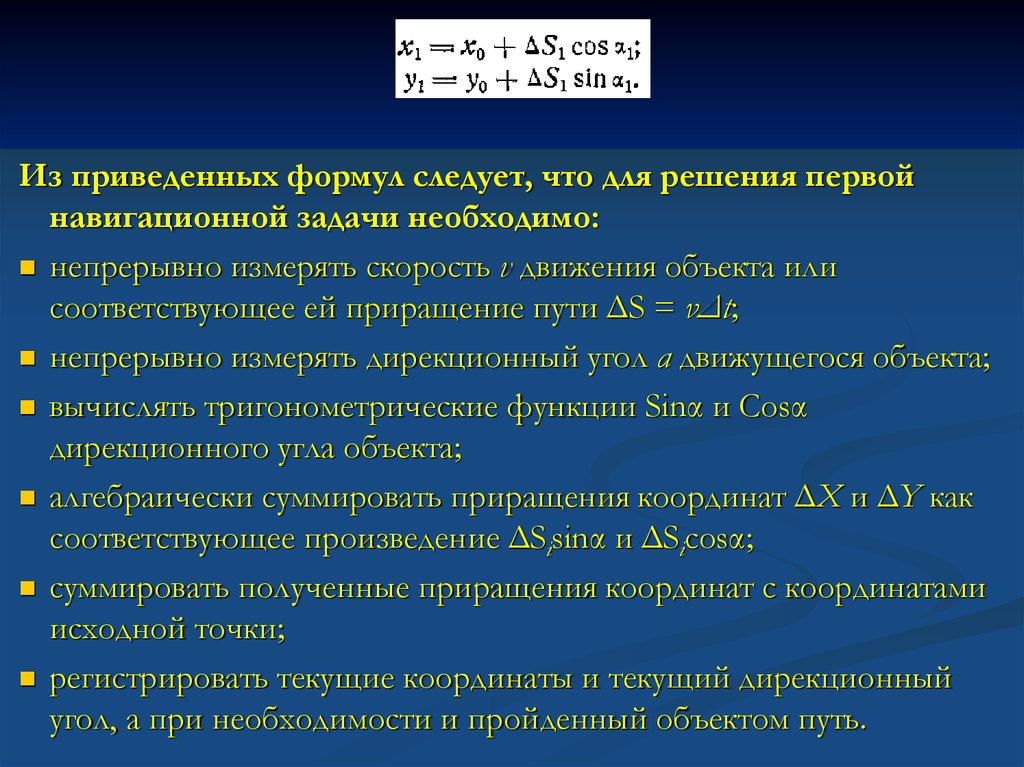
Из приведенных формул следует, что для решения первойнавигационной задачи необходимо:
непрерывно измерять скорость v движения объекта или
соответствующее ей приращение пути ΔS = νΔt;
непрерывно измерять дирекционный угол а движущегося объекта;
вычислять тригонометрические функции Sinα и Cоsα
дирекционного угла объекта;
алгебраически суммировать приращения координат ΔХ и ΔY как
соответствующее произведение ΔSisinα и ΔSicosα;
суммировать полученные приращения координат с координатами
исходной точки;
регистрировать текущие координаты и текущий дирекционный
угол, а при необходимости и пройденный объектом путь.
18. Вторая навигационная задача
Вторая навигационная задача - определениедирекционного угла на пункт назначения и
дальности до него.
Исходными данными для решения второй
навигационной задачи являются координаты пункта
назначения и текущие координаты объекта.
18
19. ВТОРАЯ НАВИГАЦИОННАЯ ЗАДАЧА
Исходными данными для решениявторой навигационной задачи
являются координаты Хпн и Упн
пункта назначения и текущие
координаты Хт и Ут объекта.
Принцип решения второй навигационной задачи
сводится к следующему:
Из прямоугольного треугольника АВС дальность до
пункта назначения Sпн и дирекционный угол апн на
него определяются из соотношений:
В некоторых случаях вторая задача решается
не в полном объеме, а ограничивается
определением
апн
и
приращений
по
координатным осям ΔХПН и ΔУПН от объекта до
пункта назначения.
Решение второй навигационной
задачи:
а-схема взаимного расположения объекта
и пункта назначения; б-схема взаимного
расположения объекта и пункта назначения
20. Третья навигационная задача
Третья навигационная задача — определение плоскихпрямоугольных геодезических координат цели Х и У
по известным плоским прямоугольным геодезическим
координатам объекта, дальности до цели и
дирекционному углу на цель.
Необходимость решения третьей навигационной
задачи возникает на объектах, которые предназначены
для ведения разведки и определения координат
обнаруженных целей. Входными данными для
решения этой задачи являются дальность до цели и
угол визирования на нее.
20
21. ТРЕТЬЯ НАВИГАЦИОННАЯ ЗАДАЧА Для объектов, предназначенных для ведения разведки и определения координат обнаруженных целей.
Входными данными для решения этой задачи являются дальностьдо цели SЦ и угол визирования αвиз на нее. Зная текущие координаты
объекта Хт и Ут и его дирекционный угол ат, представляется
возможным определить координаты Хц и Уц цели по углу визирования
αвиз на цель и дальности SЦ до нее.
22. Задание на самостоятельную подготовку
Отработать материал практического занятия;Тренироваться в решении навигационных
задач.
22