








")










































 warfare
warfareSimilar presentations:





 и омсбр (отбр). Занятие №1")

")


Навигационное оборудование бронеобъектов. Танковая навигационная аппаратура
1. Военная кафедра НИУ ВШЭ
Тема 37: Навигационное оборудование бронеобъектов.1
2. УЧЕБНЫЕ ВОПРОСЫ:
1.Состав и назначение элементов навигационнойаппаратуры. Балансировка аппаратуры.
Определение исходных дирекционных углов
машины с использованием 1г11н (1т25-1).
2. Общее устройство и принцип работы
курсоуказателя координатора и датчика пути.
3. Балансировка аппаратуры, определение углов с
использованием гирокомпаса и визира
ориентирования.
2
3. Танковая навигационная аппаратура предназначена для повышения эффективности действий частей и подразделений Сухопутных войск
при решенииразличных тактических задач в условиях затрудненного
ориентирования.
Аппаратура обеспечивает определение координат танка с
высокой точностью от пройденного пути без
переориентирования, решает следующие навигационные
задачи:
автоматическое определение координат объекта;
автоматическое определение дирекционного угла объекта;
автоматическое определение дирекционного угла на пункт
назначения;
индикация местоположения объекта на топографической карте;
автоматическое определение разностей координат
местоположения объекта и координат пункта назначения.
3
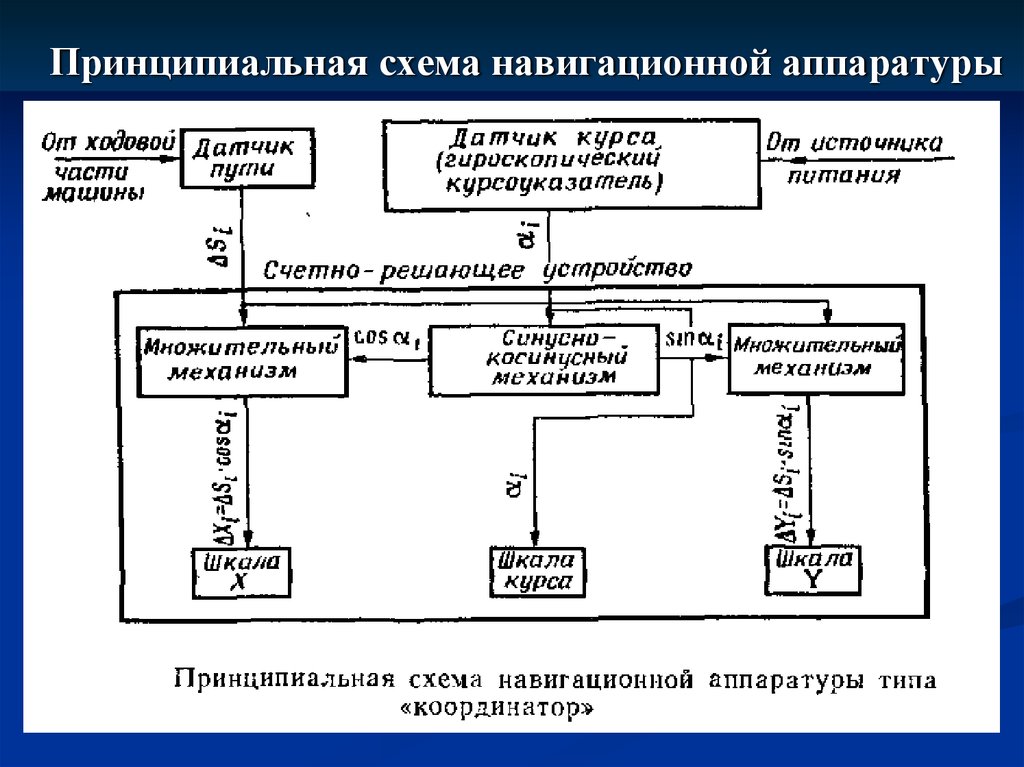
4.
Принципиальная схема навигационной аппаратуры5. Местоположение объекта характеризуется плоскими прямоугольными геодезическими координатами X и Y, а направление движения —
дирекционным углом a.Дирекционным углом объекта называется угол
между северным направлением вертикальной
линии сетки топографической карты и
продольной осью объекта (условной линией,
совпадающей по направлению с вектором
скорости движения объекта вперед по
прямолинейному горизонтальному
участку).Навигационная информация может
отображаться стрелочными и цифровыми
индикаторами или непосредственно нанесение
5
6. Назначение приборов и устройств
Датчики первичной информации преобразуют линейные иугловые перемещения объекта в электрические сигналы.
группа гирокурсоуказателей
(ГКУ)
в качестве гирокурсоуказателей
применяются трехстепенные
гироскопические приборы,
которые вырабатывают
электрический сигнал,
пропорциональный изменению
дирекционного угла объекта
группу механических датчиков
скорости (МДС).
механические датчики скорости
электромеханического или
электронного типа предназначены
для выработки электрического
сигнала, пропорционального пути и
скорости объекта
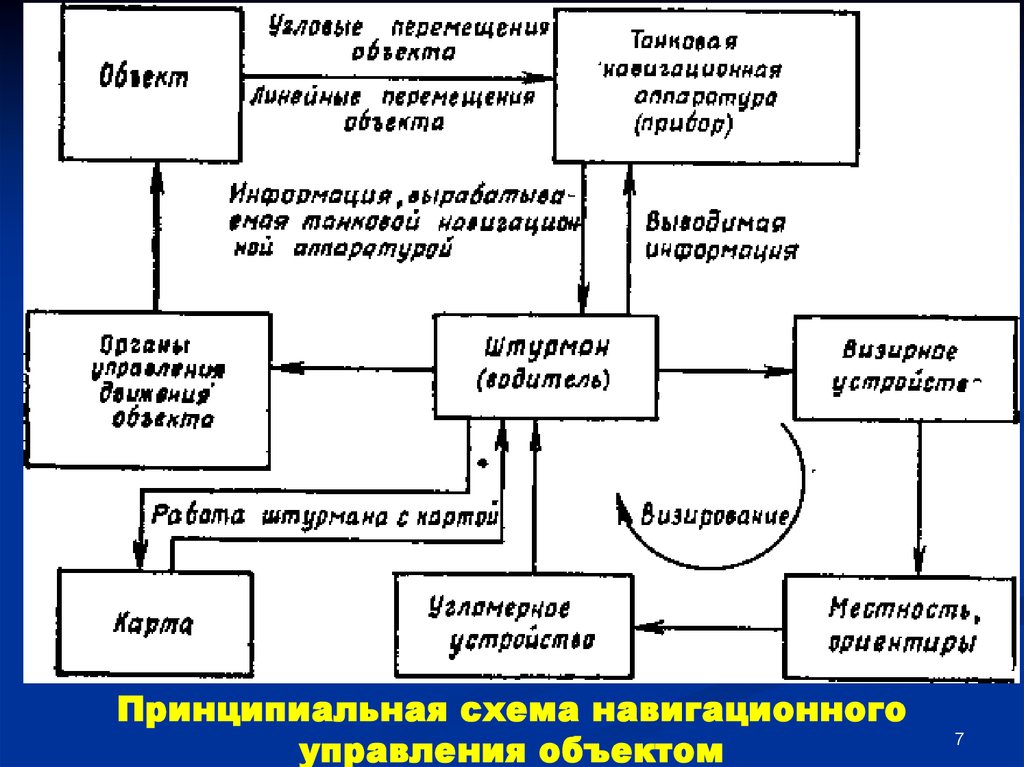
7.
Принципиальная схема навигационногоуправления объектом
7
8. Состав и назначение навигационного оборудования БРМ-1К
Состав и назначение навигационногооборудования БРМ-1К
В состав навигационного оборудования входят:
комплект гирокомпаса 1Г11;
визир ориентирования 1Т25-1;
навигационная аппаратура “КВАДРАТ-1”.
Навигационная аппаратура после ввода в нее исходных данных автоматически
вырабатывает навигационную информацию о местоположении движущегося
объекта и направлении его движения.
8
9. Комплект гирокомпаса 1Г11
1.2.
3.
Комплект гирокомпаса 1Г11 работает на
неподвижной машине и предназначен для
определения исходного дирекционного угла
продольной оси машины
Состоит:
Гирокомпас
Установочный столик
Пульт управления
9
10. Навигационная аппаратура “КВАДРАТ-1”.
1.2.
3.
Навигационная аппаратура является счетнорешающим комплексом, предназначенным:
для непрерывной автоматической выработки
координат движущейся машины;
для выработки дирекционного угла машины и
дирекционного угла на пункт назначения;
для выработки текущего местоположения
машины на карте, а также для определения
координат цели с помощью счислителя СТМ.
10
11. Технические характеристики
Среднеарифметическая ошибка выработки координат не должна превышать1.3 % по каждой координате от величины пройденного пути за время
работы без переориентирования в течение 7 часов работы при скоростях
движения объекта до 110 км/ч.
Ошибка установки и считывания показаний дирекционного угла объекта по
шкале точного отсчета координатора равна 1 д.у.
Ошибка установки и считывания разностей координат пункта назначения и
места положения объекта равна 200 м.
Ошибка удержания дирекционного угла объекта аппаратурой за час работы
не более 00-34.
Ошибка отображения положения объекта на карте - 1.0 мм.
Время готовности аппаратуры к работе 13 мин; при температуре
окружающего воздуха от минус 20 до минус 40 гр. - 20 мин.
12. Состав ТНА-3(4)
курсовая система,датчик пути
координатор
курсоуказатель
индикаторный планшет
блок коммутации
хордоугломер
циркуль-измеритель
счислитель СТМ
12
13. Размещение навигационной аппаратуры в БРМ-1К
1- визир ориентирования 1Т25-1; 2- пульт управления курсовой системы; 3гирокурсоуказатель;4-блок питания гирокомпаса; 5- преобразователь ПТ-200ЦШ; 6- блок управления гирокомпаса;
7- гирокомпас 1Г11Н; 8- планшет
индикаторный; 9- блок коммутации; 10- координатор; 11- курсоуказатель; 12датчик пути.
14. Курсовая система «Маяк»
ГирокурсоуказательПульт управления
Блок коммутации
Преобразователь ПТ-200Ц-11
14
15. Гирокурсоуказатель
16. Гирокурсоуказатель
17. Пульт управления
12
3
6
5
4
1-Корпус. Шкалы ПУ закреплены на ручках (2), предназначенных для
поворота регулировочных резисторов ЭЛБ (6) и ШИРОТА (3), Зажимы (4)
18. ПТ-200Ц
19. Датчик пути
1-крышка. 2-корпус. 3-втулка.4-гибкий вал20. Координатор
21. Координатор
22. Курсоуказатель
23. Курсоуказатель
24. Индикаторный планшет
25. Индикаторный планшет
26. Блок коммутации
32
1
4
27. Визир ориентирования
34
2
16
1
5
14
6
7
15
13
а
12
9
11
10
8
28. Визир ориентирования 1Т25
29.
30. Счислитель СТМ
31. Счислитель СТС, хордоугломер,циркуль -измеритель
32. Счислитель СТС, хордоугломер,циркуль -измеритель
33. Гирокомпас 1г 11
Состоит из:Гироузла
Визирной головки
34. Гирокомпас 1г 11
35.
Гирокомпас 1Г1135
36. ГИРОКУРСОУКАЗАТЕЛЬ прибор одометрической наземной навигационной аппаратуры с гироскопическим чувствительным элементом,
предназначенный длявыработки информации об изменении дирекционного угла объекта.
В качестве чувствительного элемента используется гироскоп с тремя степенями свободы.
Под гироскопом понимается тяжелый симметричный маховик, вращающийся с большой
частотой, одна из точек которого неподвижна.
Ротор 1 гироскопа с большой угловой скоростью ω вращается
вокруг оси X-X, называемой главной осью гироскопа.
Карданов подвес 2, состоящий из двух рамок, обеспечивает
свободу вращения ротора гироскопа вокруг неподвижной
точки.
В наружную рамку 3 установлена главная ось, которая может
поворачиваться вокруг оси Y-Y.
У
Наружная рамка вместе с внутренней и ротором может
поворачиваться вокруг оси Z-Z относительно основания 4.
Схема гироскопа с тремя
степенями свободы:
1- ротор;
2-внутренняя рамка;
3-наружная рамка;
4-основание
Оси X-X, У-У и Z-Z перпендикулярны и пересекаются в одной точке О,
являющейся неподвижной. Карданов подвес обеспечивает ротору
гироскопа свободу вращения относительно трех осей, поэтому гироскоп,
установленный в кардановом подвесе, называют гироскопом с тремя
степенями свободы или свободным (гироскоп, у которого сумма
моментов внешних сил по любой его оси равна нулю ).
37. Гирокурсоуказатель
Сельсинтрансформаторгоризонтальный и вертикальный
корректоры
маятниковый переключатель
гиромотор
триггер Шмитта
38. Гирокурсоуказатель
39. гироскопический курсоуказатель
чувствительным элементом которого служиттрехстепенной гироскоп. Обеспечивает
непрерывное определение и передачу в
координатор значения дирекционного угла
направления движения машины.
Пульт управления служит для включения и
выключения аппаратуры и широтной
балансировки гироскопа.
39
40. ПТ-200Ц
41. Датчик пути
1-крышка. 2-корпус. 3-втулка.4-гибкий вал42. Датчик пути
представляет собой электромеханическийприбор, соединенный с ходовой частью
машины гибким валиком. Энергия
механического вращения валика при
движении машины превращается в
электрические сигналы, которые поступают в
координатор. Таким образом датчик пути
непрерывно определяет величину
пройденного расстояния и передает ее в
координатор.
42
43. Координатор
44. Назначение приборов и устройств
Счетно-решающие приборы предназначены для обработкисигналов датчиков первичной информации по заданным
алгоритмам.
Корректирующие устройства служат для компенсации
погрешностей, возникающих при работе датчиков первичной
информации.
Устройство ввода информации служит для ввода исходных
данных, необходимых для работы навигационной аппаратуры.
Устройство выходной информации служит для
автоматического отображения вырабатываемой в СРП
навигационной информации.
Встроенный контроль обеспечивает проверку исправности
основных систем, узлов и приборов навигационной аппаратуры и ее
готовности к работе.
Блоки питания обеспечивают электропитанием приборы
навигационной аппаратуры.
45. Координатор
Прибор наземной навигации. Его основу составляетсчетно-решающее устройство, которое по данным,
поступающим от датчиков пути и курса,
непрерывно вырабатывает прямоугольные
координаты местоположения движущейся
машины, курс движения, дирекционный угол
направления на конечный пункт маршрута и
расстояние до него по приращениям (разностям)
координат. Это позволяет точно выдержать
направление движения и прибыть в указанный
пункт, не пользуясь топографической картой даже
в сложных и трудных условиях ориентирования.
45
46. Визир ориентирования
34
2
16
1
5
14
6
7
15
13
а
12
9
11
10
8
47. Учебный вопрос №3 Балансировка аппаратуры, определение углов с использованием гирокомпаса и визира ориентирования
48. Балансировка гирокурсоуказателя:
является совокупность действий, направленных насведение к минимуму постоянных составляющих
ухода гироскопа. Данная работа проводится
одновременно с проверкой уходов
гирокурсоуказателя в движении.
Два этапа:
1. грубая балансировка в неподвижном объекте
(установка шкалы поправочного потенциометра);
2. проверка ухода гироскопа в движении (на
подготовленном участке местности).
48
49. ОПРЕДЕЛЕНИЕ ИСХОДНОГО ДИРЕКЦИОННОГО УГЛА ОБЪЕКТА
Дирекционный угол машины ( исх) можноопределить:
- с помощью гирокомпаса (1Г11, 1Г25...);
- по топографической карте с помощью
хордоугломера;
- с помощью буссоли ПАБ-2А;
- по каталогам координат геодезических пунктов;
- по звездам при помощи азимутальной насадки АНБ-1
буссоли;
- путем решения обратной геодезической задачи.
49
50.
ОПРЕДЕЛЕНИЕ ИСХОДНОГО ДИРЕКЦИОННОГО УГЛА ОБЪЕКТА( исх) С ПОМОЩЬЮ АРТИЛЛЕРИЙСКОЙ БУССОЛИ ПАБ-2М.1. Установить бус- 2. Освободить магнитную
стрелку и поворотом буссоль в 50 м от
соли вокруг вертикальной
БРМ.
оси сориентировать буссоль по магнитной стрелке.
3. Установить в кронштейн визир ориентирования (слева
от люка оператора ТНА) и навести вертикальную линию
визира на центр объектива буссоли, снять показания угла
визирования виз по шкалам грубого (с кольца под головкой визира-3) и точного (со шкалы на барабане-4) отсчета.
3
ПАБ-2
Определение Ам
1 - буссольное кольцо; 2 – буссольный барабан
50м
4
Определение
виз
визир
ориентирования
4. Навести вертикальную нить перекрестия буссоли
на центр выходного окна визира-ориентирования и
снять показания магнитного азимута (Ам) с буссольных шкал (шкала 1- большие деления угломера,
шкала 2 - малые деления угломера).
(на рисунке Ам = 7-11)
5. Вычислить дирекционный угол продольной оси БРМ по
формуле: и с х = А м П Н 3 0 - 0 0 - в и з ,
где П Н - поправка направления - берется с карты,
- 30-00 вводится со знаком “ + “ , если Ам меньше
30-00;
- 30-00 вводится со знаком “ - “ , если Ам больше
30-00.
51.
Ориентирование БРМ с помощью хордоугломера1. Определить .
2. Пересчитать в ор
в зависимости от четверти
расположения ориентира:
ор =
для I четверти;
ор = 30-00 - для II четверти;
ор = 30-00 + для III четверти;
ор = 60-00 - для IV четверти.
3. Измерить виз с БРМ на ориентир.
4. Определить исх по формуле:
исх = ор - виз
Если ор меньше виз рассчитывать по формуле:
исх = ор - виз + 60-00.
52. Подготовка рабочей карты для работы на ТНА.
Подготовкарабочей карты для работы на ТНА.
по карте намечают маршрут движения с
учетом проходимости, выбирают хорошо
видимую на местности и нанесенную на карту
четко выраженную контурную точку
(перекресток дорог, мост...), на которую можно
наехать (или подъехать вплотную) при
начальном ориентировании.
52
53. При оформлении маршрута движения на карту наносят
- исходный пункт, пункт назначения и подписывают их полныепрямоугольные координаты;
- маршрут движения и расстояние в км до контрольных точек от исходного
пункта;
- контрольные точки:
- первую по маршруту намечают в 2-3 км от исходного пункта
и используют в качестве контрольной точки для контроля работы
аппаратуры;
- затем по всему маршруту примерно через 20-30 км;
и подписывают сокращенные координаты из пяти цифр, которые будут на
счетчиках Х и У при наезде на эти контрольные точки;
- дирекционные углы на видимые ориентиры и на пункт назначения с
контрольных точек для контроля работы аппаратуры в процессе марша и
уточнения текущих координат;
- где ориентирование затруднено и направление движения придется
выдерживать по курсоуказателю, определяют и подписывают
53
дирекционные углы направлений.
54. Задание на самостоятельную подготовку
Отработать материал группового занятия;54