






 Construction
ConstructionSimilar presentations:



. Многопролётные статически определимые балки")






Строительная механика. Статически определимые плоские комбинированные системы
1. СТАТИЧЕСКИ ОПРЕДЕЛИМЫЕ ПЛОСКИЕ КОМБИНИРОВАННЫЕ СИСТЕМЫ
СТРОИТЕЛЬНАЯ МЕХАНИКА.Часть I
СТАТИЧЕСКИ
ОПРЕДЕЛИМЫЕ
ПЛОСКИЕ
КОМБИНИРОВАННЫЕ
СИСТЕМЫ
2.
Комбинированной называетсягеометрически неизменяемая система,
состоящая из различных
по характеру своей работы частей,
совместно участвующих в восприятии
заданных воздействий.
3.
4.
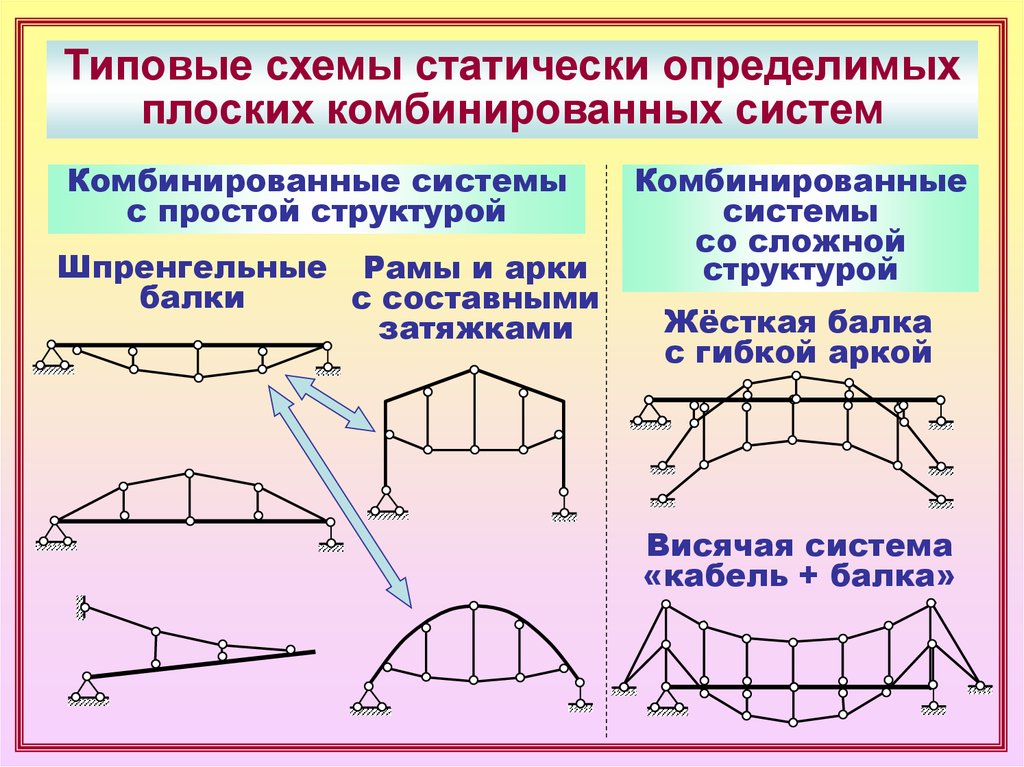
Типовые схемы статически определимыхплоских комбинированных систем
Комбинированные системы
с простой структурой
Шпренгельные Рамы и арки
балки
с составными
затяжками
Комбинированные
системы
со сложной
структурой
Жёсткая балка
с гибкой аркой
Висячая система
«кабель + балка»
5.
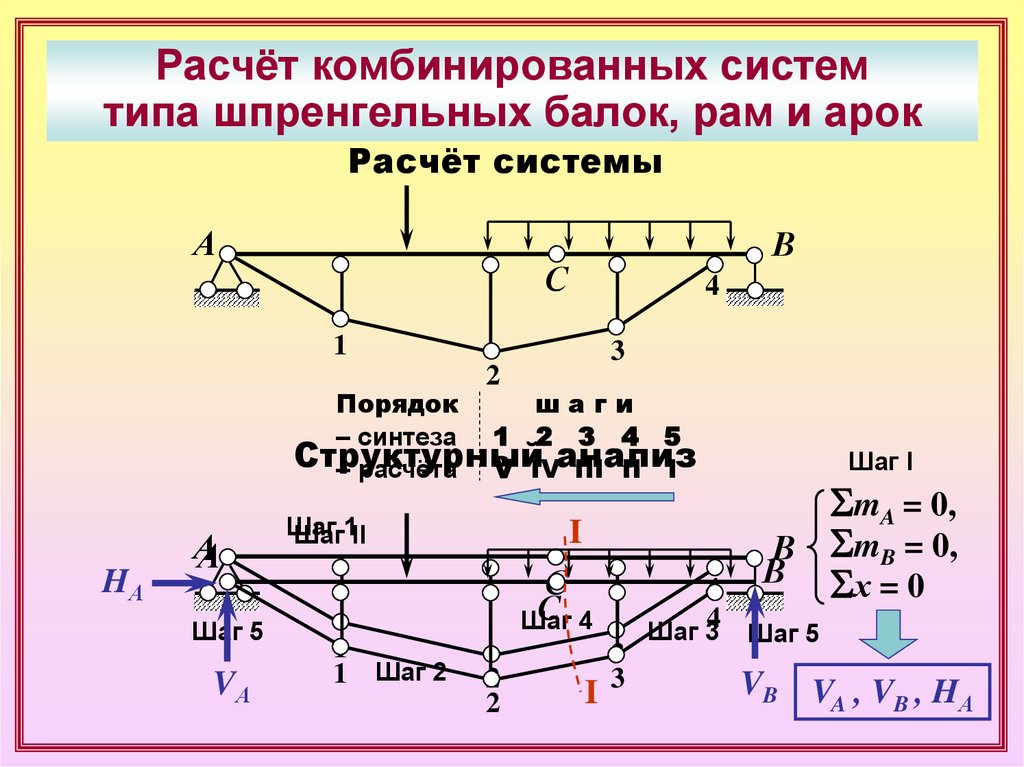
Расчёт комбинированных системтипа шпренгельных балок, рам и арок
Расчёт системы
А
В
С
4
1
3
2
Порядок
шаги
– синтеза 1 2 3 4 5
Структурный
– расчёта V IVанализ
III II I
HА
А
А
Шаг 5
VА
Шаг
Шаг1II
I
С
С 4
Шаг
1
1 Шаг 2
2
2
I
3
3
4
4
Шаг 3
Шаг I
SmA = 0,
В SmB = 0,
В Sх = 0
Шаг 5
VB VA , VB , HА
6.
Расчёт комбинированных системтипа шпренгельных балок, рам и арок
Расчёт системы
А
В
С
1
Порядок
– синтеза
– расчёта
H
SmC,(CB) =H0C = – N
2-3
HC
Sx(CB) = 0,
Sy (CB) =N02-3= H/cosVCa3
3
2
Шаг II
4
шаги
1 2 3 4 5
V IV III II I
VC I
HC
a3
N2-3
С f
3
I
H
В
4
Шаг III
VB
7.
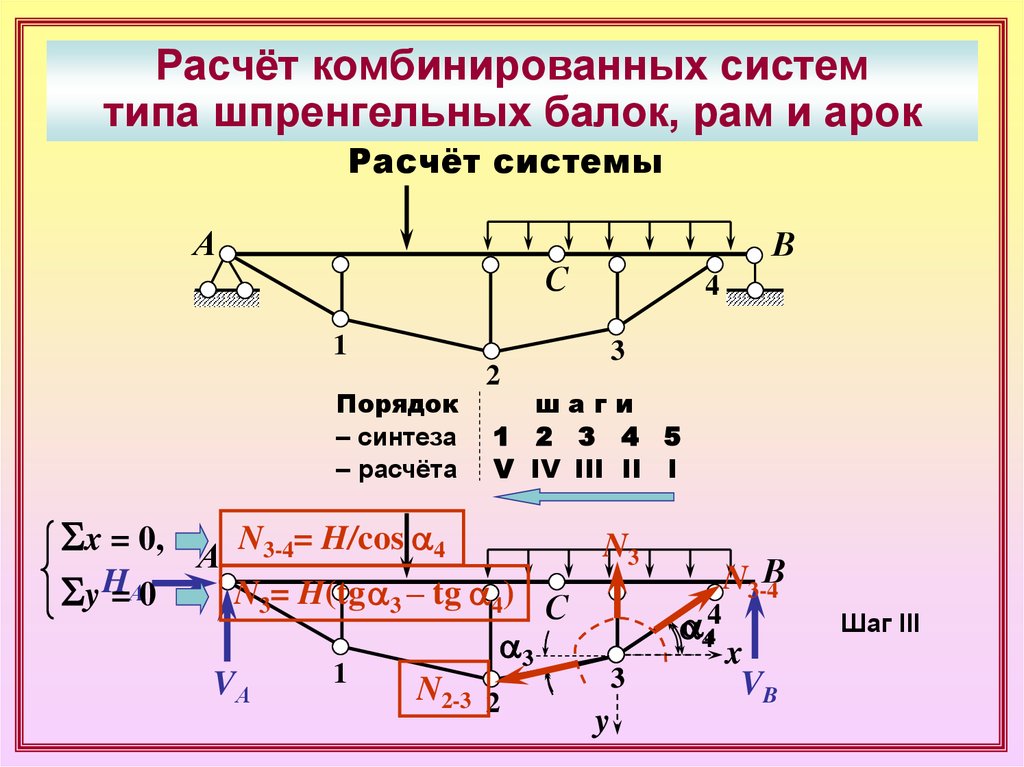
Расчёт комбинированных системтипа шпренгельных балок, рам и арок
Расчёт системы
А
В
С
4
1
Порядок
– синтеза
– расчёта
3
2
шаги
1 2 3 4 5
V IV III II I
Sx = 0, А N3-4= H/cos a4
N3
N3= H(tga3 – tg a4) С
Sy H=А0
VА
1
a3
N2-3 2
3
y
a444
N3-4В
Шаг III
x
VB
8.
Расчёт комбинированных системтипа шпренгельных балок, рам и арок
Расчёт системы
А
С
1
4
3
2
Порядок
– синтеза
– расчёта
Sx = 0,
Sy = 0
N2-1= H/cos a2
В
шаги
1 2 3 4 5
V IV III II I
N2
N2-1
N2= H(tga2 – tg a3)
a2
Шаг IV
a3
2
x
y
N2-3
9.
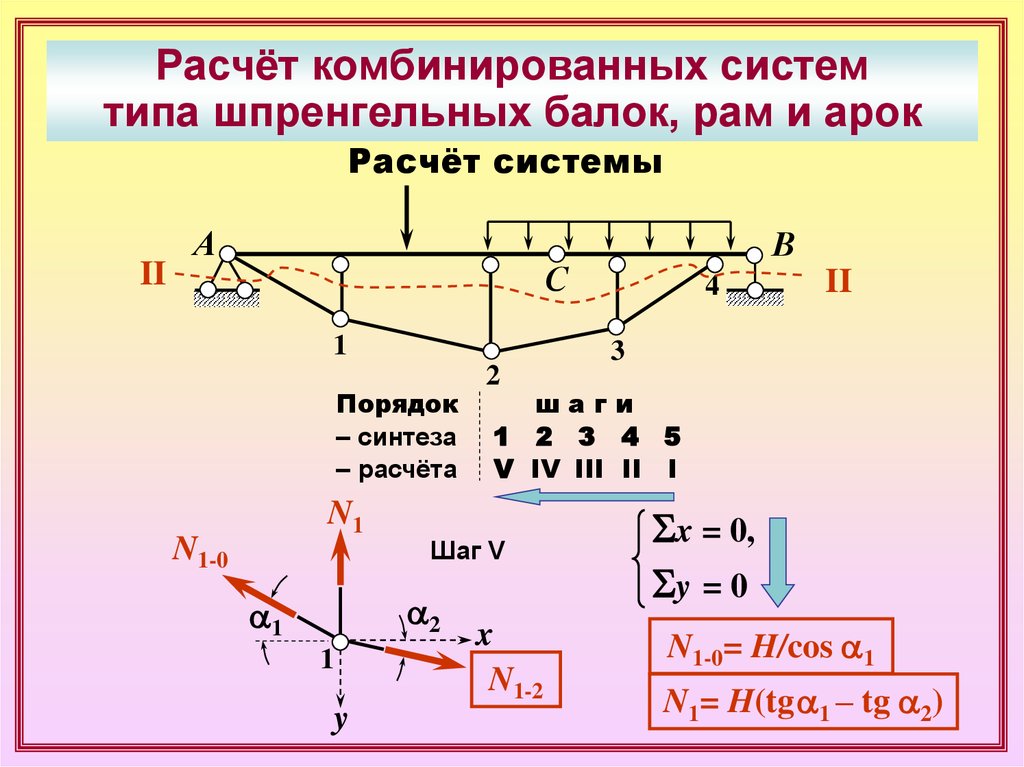
Расчёт комбинированных системтипа шпренгельных балок, рам и арок
Расчёт системы
II
А
В
С
1
Порядок
– синтеза
– расчёта
N1
N1-0
1
y
II
3
шаги
1 2 3 4 5
V IV III II I
Шаг V
a2
a1
2
4
x
N1-2
Sx = 0,
Sy = 0
N1-0= H/cos a1
N1= H(tga1 – tg a2)
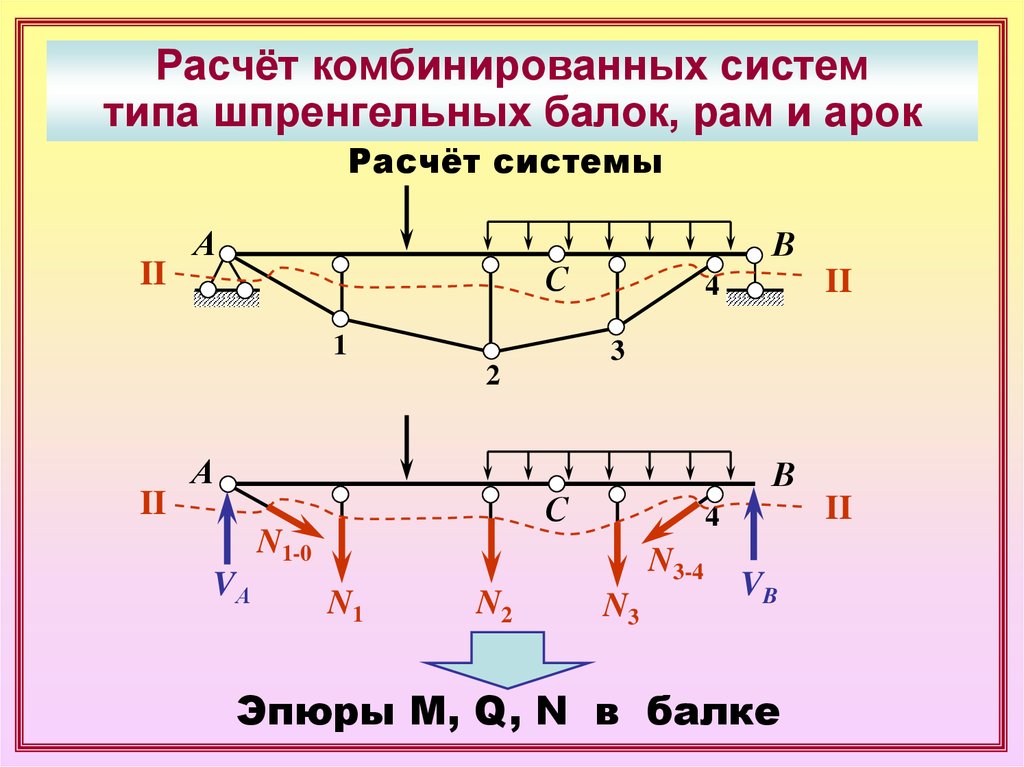
10.
Расчёт комбинированных системтипа шпренгельных балок, рам и арок
Расчёт системы
II
А
С
1
А
В
С
N3-4
N1
N2
II
4
N1-0
VА
II
4
3
2
II
В
N3
VB
Эпюры M, Q, N в балке
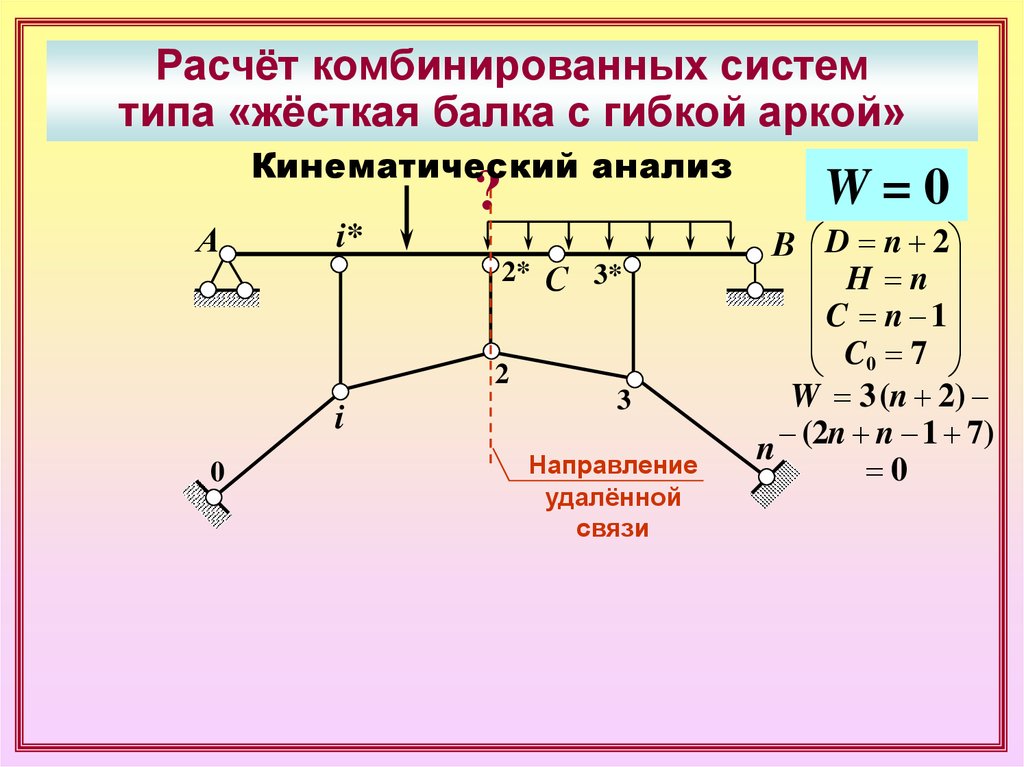
11.
Расчёт комбинированных системтипа «жёсткая балка с гибкой аркой»
Кинематический анализ
А
?
i*
2* С 3*
2
i
0
3
Направление
удалённой
связи
W=0
В D n 2
H n
C n 1
C0 7
W 3 (n 2)
n (2n n 1 7)
0
12.
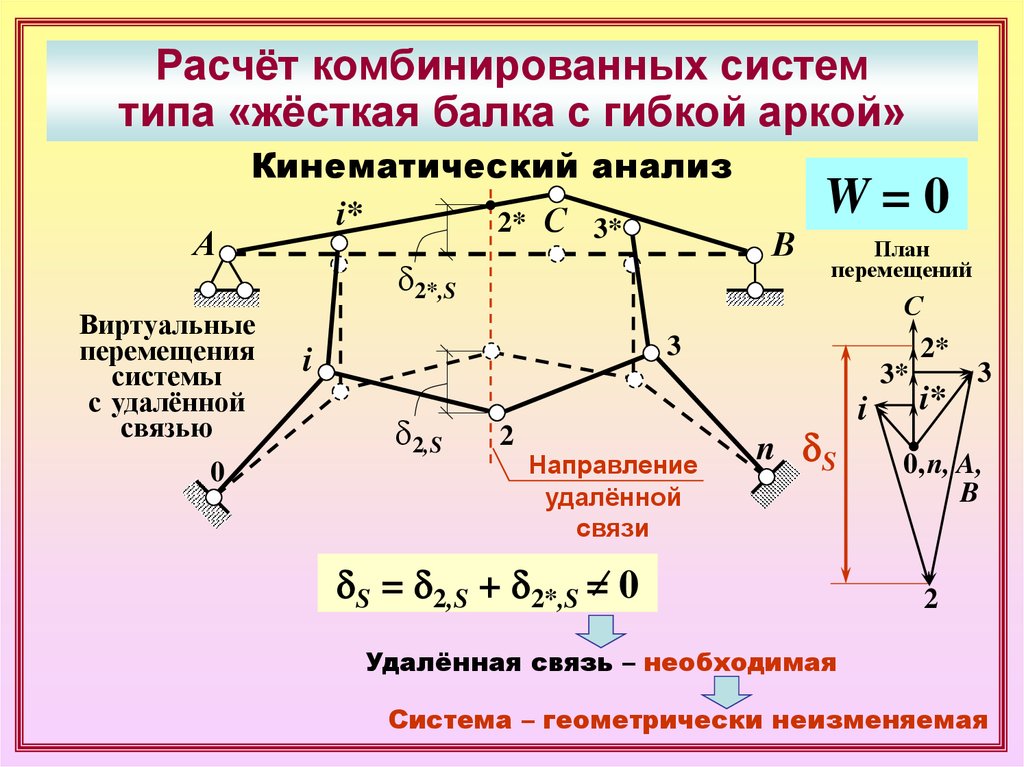
Расчёт комбинированных системтипа «жёсткая балка с гибкой аркой»
А
Кинематический анализ
i*
2* С 3*
Виртуальные
перемещения
системы
с удалённой
связью
0
d2*,S
W=0
В
План
перемещений
С
2*
3
3*
3
i
d2,S
2
Направление
удалённой
связи
n dS
dS = d2,S + d2*,S = 0
i
i*
0,n, A,
B
2
Удалённая связь – необходимая
Система – геометрически неизменяемая
13.
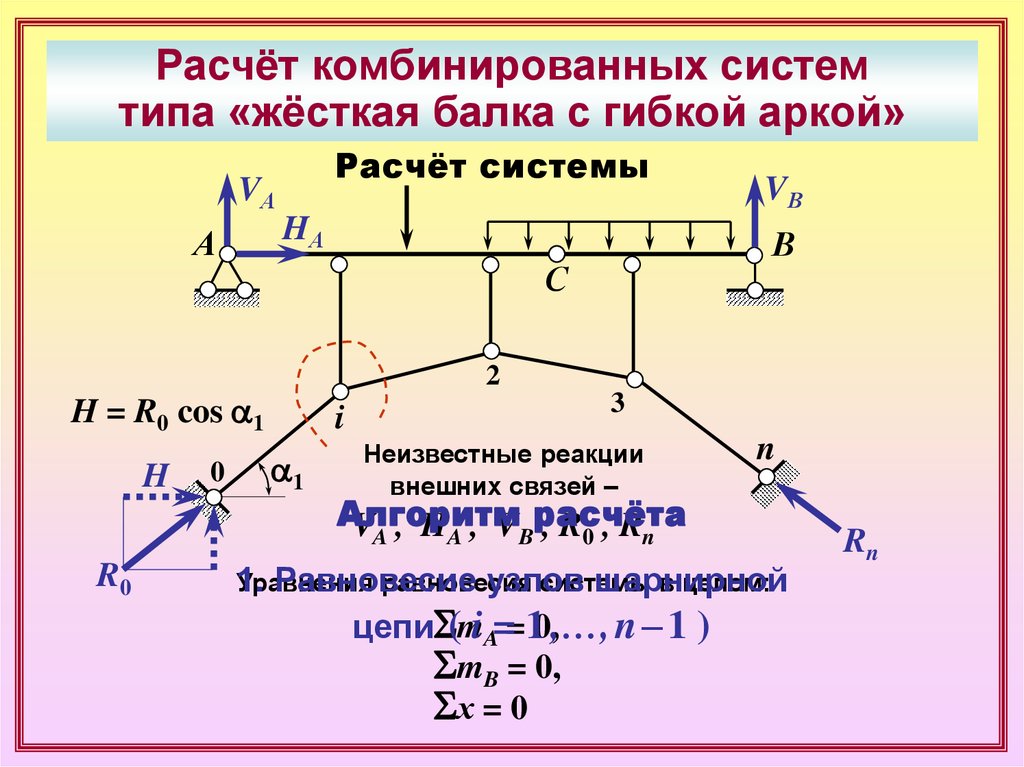
Расчёт комбинированных системтипа «жёсткая балка с гибкой аркой»
Расчёт системы
VА
HА
А
R0
0
В
С
2
H = R0 cos a1
H
VВ
i
a1
3
Неизвестные реакции
внешних связей –
n
Алгоритм
VA , HA , VBрасчёта
, R0 , Rn
Уравнения
равновесия
системы
в целом:
1.
Равновесие
узлов
шарнирной
цепиS(miA==10,,…, n – 1 )
SmB = 0,
Sх = 0
Rn
14.
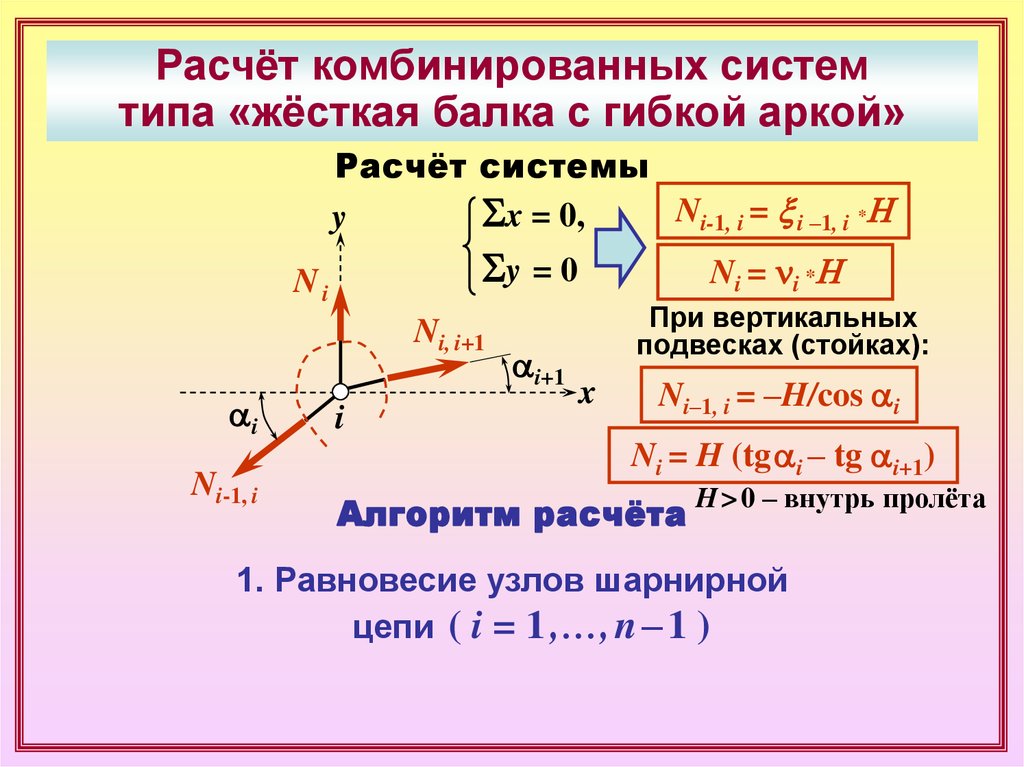
Расчёт комбинированных системтипа «жёсткая балка с гибкой аркой»
Расчёт системы
Ni-1, i = x i –1, i *H
Sx = 0,
y
Sy = 0
Ni
Ni, i+1
ai
Ni-1, i
i
ai+1
Ni = ni *H
При вертикальных
подвесках (стойках):
x
Ni–1, i = –H/cos ai
Ni = H (tgai – tg ai+1)
Алгоритм расчёта
H > 0 – внутрь пролёта
1. Равновесие узлов шарнирной
цепи ( i = 1 ,…, n – 1 )
15.
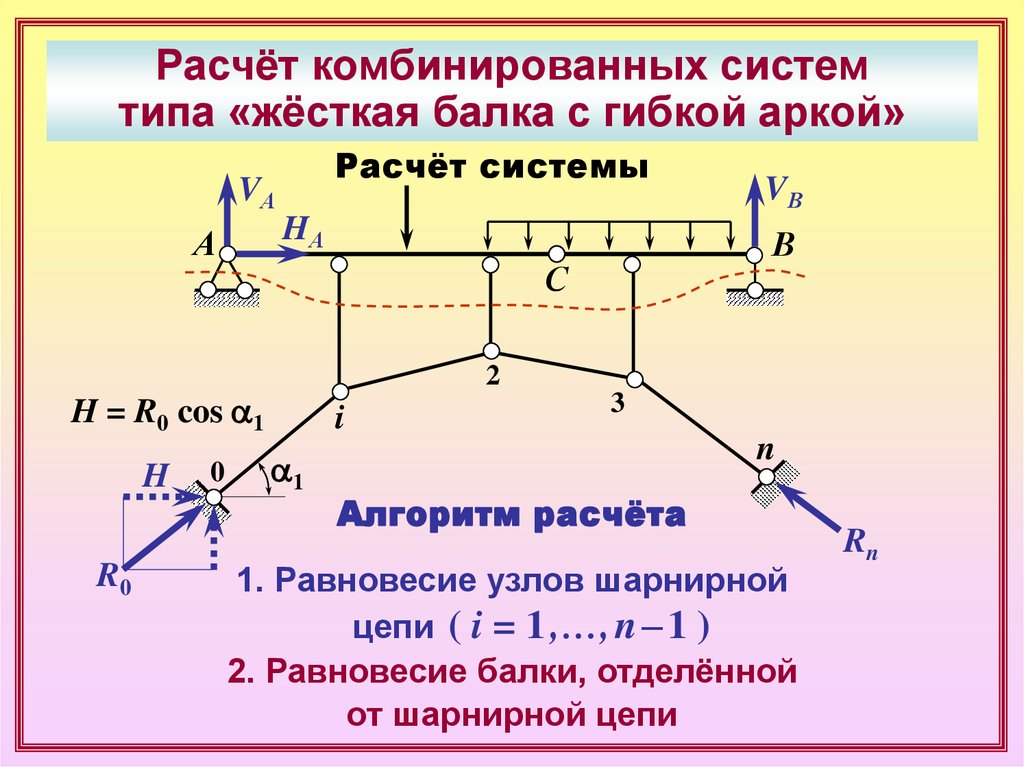
Расчёт комбинированных системтипа «жёсткая балка с гибкой аркой»
Расчёт системы
VА
HА
А
R0
0
В
С
2
H = R0 cos a1
H
VВ
i
a1
3
n
Алгоритм расчёта
1. Равновесие узлов шарнирной
цепи ( i = 1 ,…, n – 1 )
2. Равновесие балки, отделённой
от шарнирной цепи
Rn
16.
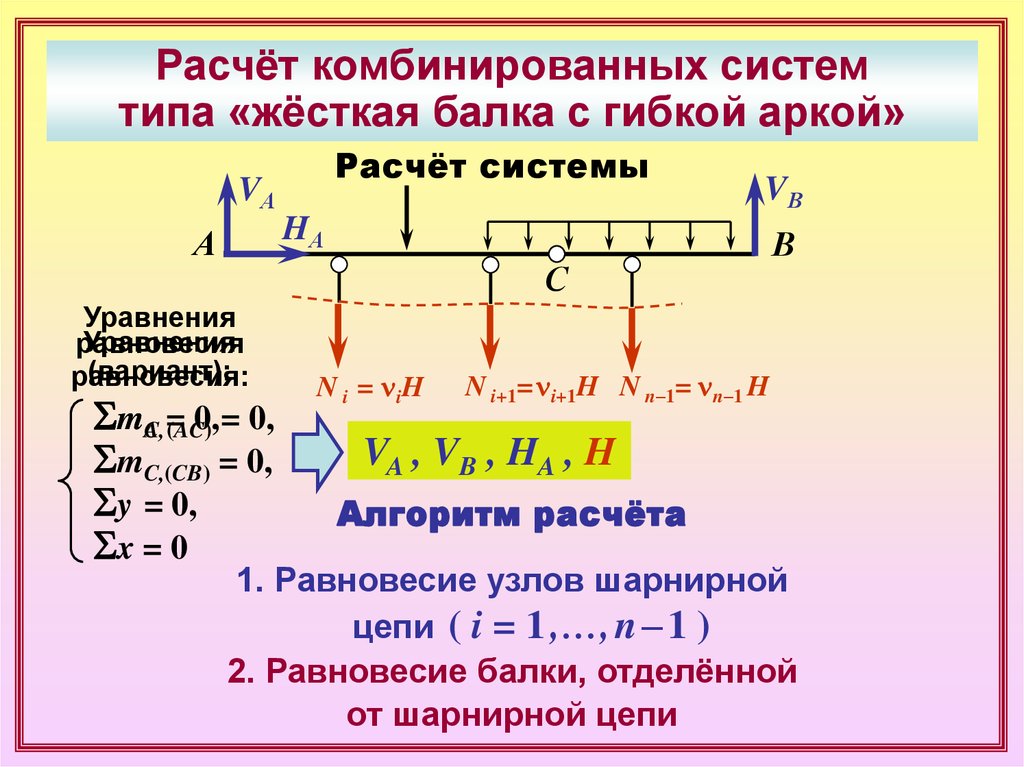
Расчёт комбинированных системтипа «жёсткая балка с гибкой аркой»
Расчёт системы
VА
VВ
HА
А
С
Уравнения
Уравнения
равновесия
(вариант):
равновесия:
SmAC,(AC)
= 0,= 0,
SmC,(CB) = 0,
Sy = 0,
Sx = 0
N i = n iH
В
N i+1= ni+1H N n–1= nn–1 H
VA , VB , HA , H
Алгоритм расчёта
1. Равновесие узлов шарнирной
цепи ( i = 1 ,…, n – 1 )
2. Равновесие балки, отделённой
от шарнирной цепи
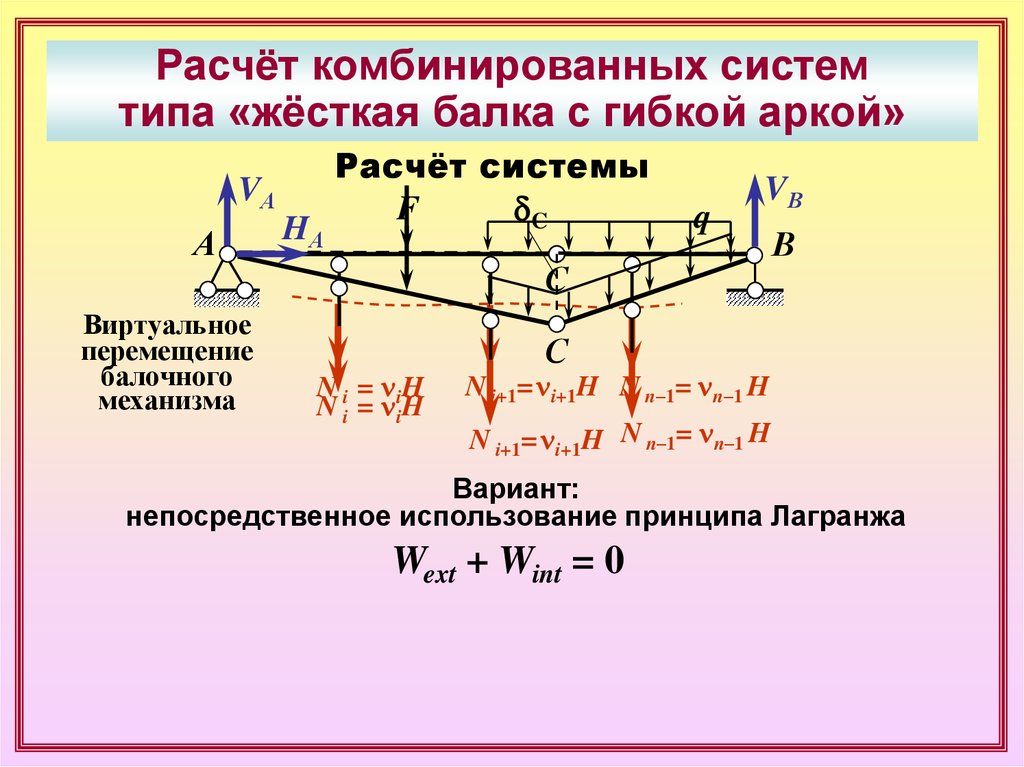
17.
Расчёт комбинированных системтипа «жёсткая балка с гибкой аркой»
VА
А
Виртуальное
перемещение
балочного
механизма
HА
Расчёт системы
F
dC
q
VВ
С
N i = n iH
N i = n iH
В
С
N i+1= ni+1H N n–1= nn–1 H
N i+1= ni+1H N n–1= nn–1 H
Вариант:
непосредственное использование принципа Лагранжа
Wext + Wint = 0
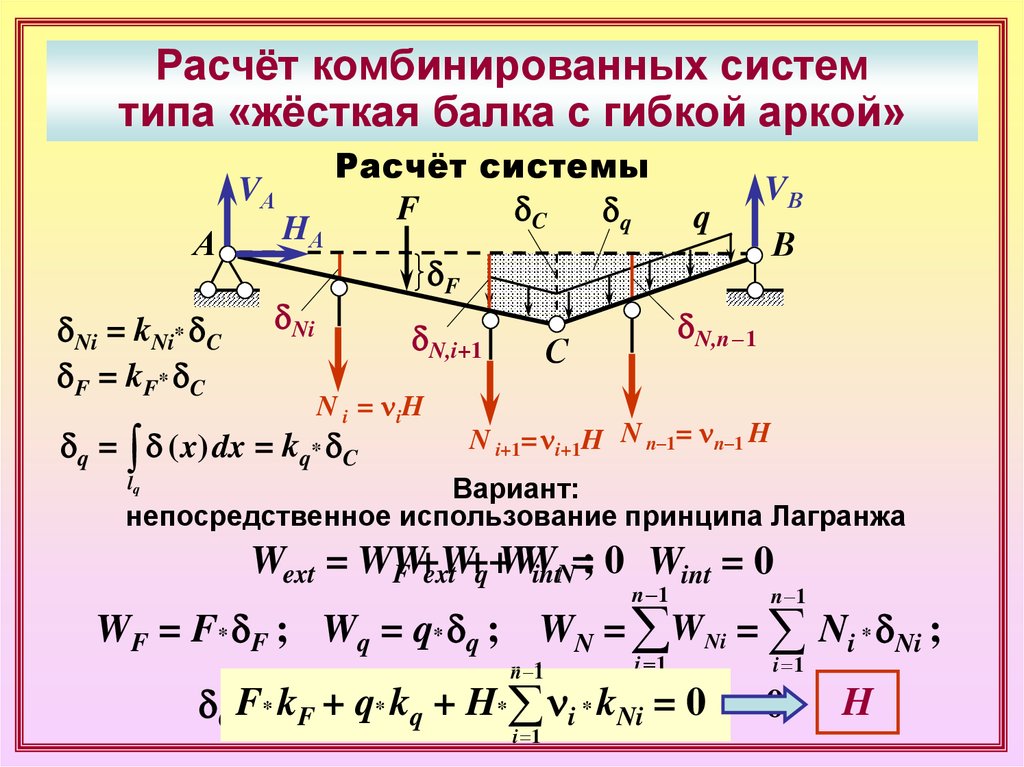
18.
Расчёт комбинированных системтипа «жёсткая балка с гибкой аркой»
VА
А
HА
dNi = kNi* dC
dF = kF* dC
dNi
Расчёт системы
F
dC
dq
dF
dN,i+1
N i = n iH
dq = d ( x) dx = kq* dC
q
VВ
В
dN,n –1
С
N i+1= ni+1H N n–1= nn–1 H
Вариант:
непосредственное использование принципа Лагранжа
lq
Wext = WW
F +W
ext +
q+WW
intN=; 0 Wint = 0
n 1
n 1
i 1
i 1
WF = F* dF ; Wq = q* dq ; WN = W Ni = Ni * dNi ;
n 1
kF* k+Fq+* kqq* k+q H
=Ni0 ) = 0
dCF* (* F
+* nni i**kH
Ni* k
i 1
H
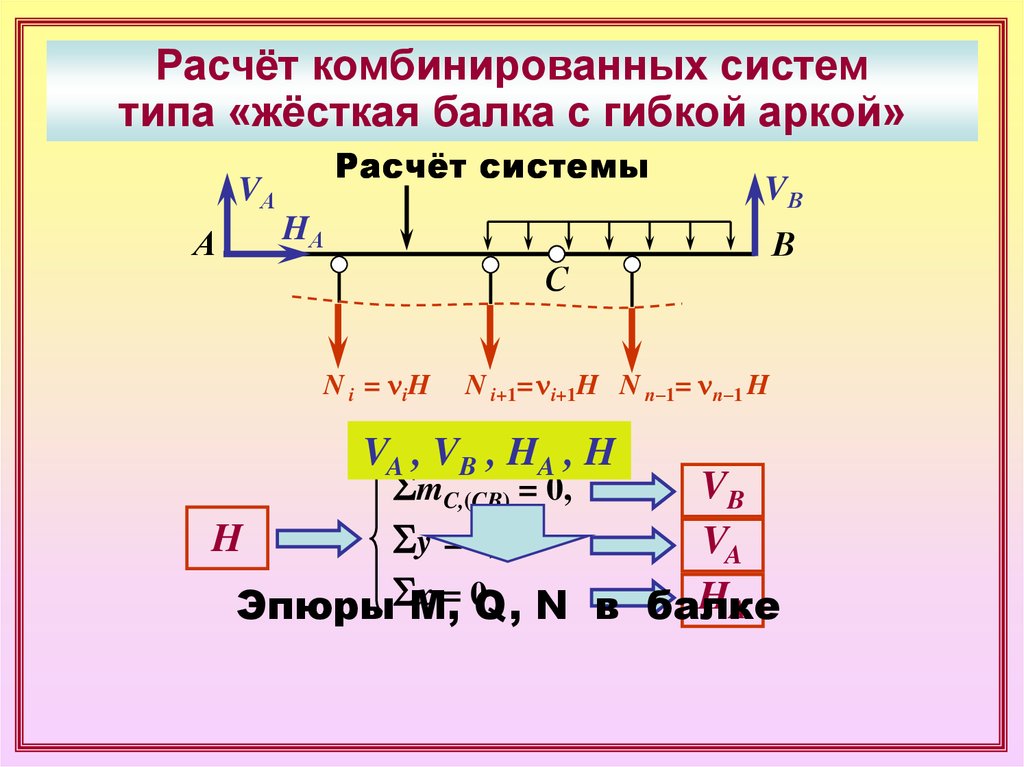
19.
Расчёт комбинированных системтипа «жёсткая балка с гибкой аркой»
Расчет системы
Расчёт
VА
А
VВ
HА
С
N i = n iH
В
N i+1= ni+1H N n–1= nn–1 H
VA , VB , HA , H
VB
SmC,(CB) = 0,
H
Sy = 0,
VA
x = 0Q, N в балке
HA
ЭпюрыSM,
20.
Расчёт комбинированных системтипа «жёсткая балка с гибкой аркой»
Аналогия с трёхшарнирной аркой
А
С
2
i
А/
В
C/ 3
n
B/
0
Ограничение:
только при вертикальной нагрузке
и вертикальных стойках (подвесках)
21.
Расчёт комбинированных системтипа «жёсткая балка с гибкой аркой»
Аналогия с трёхшарнирной аркой
х
А
В
С
х
А/
H a0
q(х)
Mа (x)
Qа (x)
C/
f
H
B/
х
H = M0,C /f
Внутренние силовые факторы
в сечении балки комбинированной системы:
M(x) = Mа (x)
Q (x) = Qа (x) / cos q(x)
Усилия в стойках и элементах шарнирной цепи:
Ni = ni H
Ni–1, i = xi–1, i H
22.
Расчёт комбинированных системтипа «жёсткая балка с гибкой аркой»
Аналогия с трёхшарнирной аркой
хK
А
F = 1 Линии влияния силовых факторов
В
K
С
F=1
хK
K’
А/
H a0
qK’
Л.В. Ni = ni * Л.В. H
Л.В. Ni–1, i = xi–1, i * Л.В. H
C/
f
H
a b/(f l)
a
b
B/
х
Л.В. H
Л.В. MK = Л.В. MK’
1
Л.В. QK = Л.В. QK’ /cosqK‘
23.
Контрольные вопросы( в скобках даны номера слайдов, на которых можно найти ответы на вопросы;
для перехода к слайду с ответом можно сделать щелчок мышью по номеру в скобках*);
для возврата к контрольным вопросам сделать щелчок правой кнопкой мыши
и выбрать «Перейти к слайду 22» )
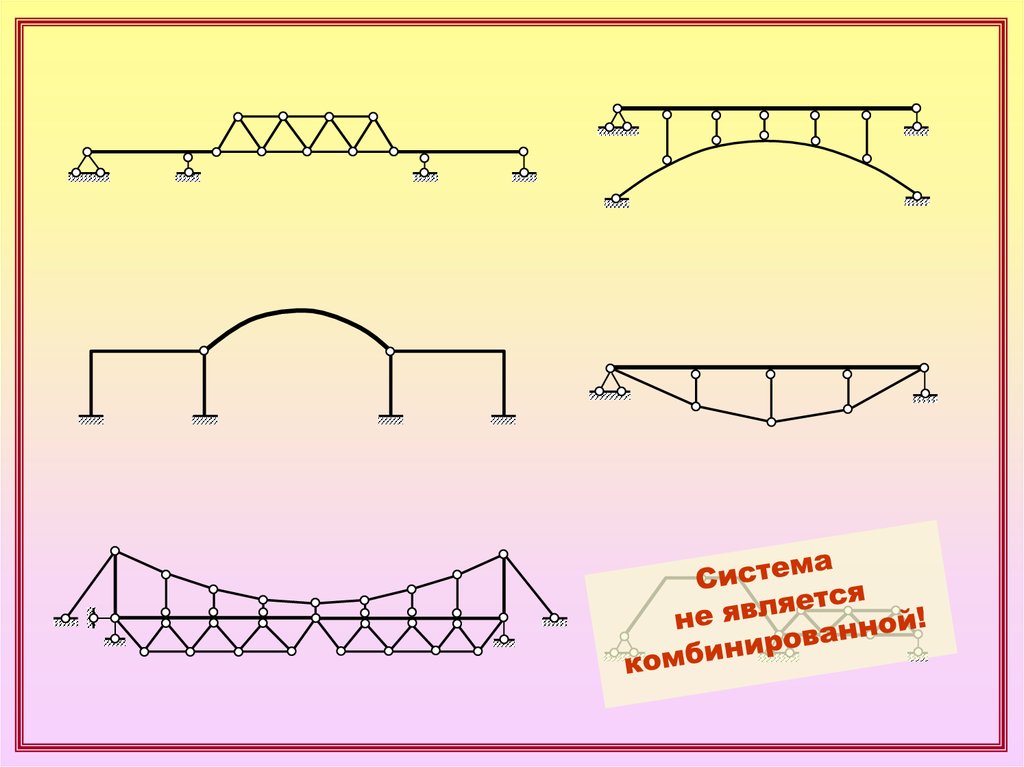
1. Какие системы называются комбинированными? ( 2 )
2. Является ли комбинированной
изображённая система? ( 2, 3 )
3. Как определяется рациональный порядок расчёта комбинированных систем с простой
структурой? Какую роль играет при этом структурный анализ системы? ( 5 )
4. В каком порядке рассчитывается система типа «шпренгельная балка»? ( 5 – 10 )
5. Как выполняется кинематический анализ системы типа «жёсткая балка с гибкой аркой
– ЖБГА» ( комбинированной системы со сложной структурой )? ( 11 )
6. Какова рациональная последовательность расчёта системы типа ЖБГА? ( 13 – 19 )
7. Через какой силовой фактор удобно выражать усилия в элементах шарнирной цепи
и стойках ( подвесках )? ( 13, 14 ) Какие уравнения для этого используются? ( 14 )
8. Как определяются реакции связей ( опорных и соединительного шарнира )
балочной части комбинированной системы типа ЖБГА? ( 16 – 19 )
9. В чём состоит аналогия между комбинированной системой типа ЖБГА
и трёхшарнирной аркой? Каковы ограничения в применении этой аналогии? ( 20 )
10. Как задаётся очертание оси и места расположения шарниров в арке-аналоге? ( 20 )
11. По каким формулам вычисляются изгибающие моменты и поперечные силы в балке
комбинированной системы через моменты и поперечные силы в арке-аналоге? ( 21 )
12. Как с помощью арки-аналога строятся линии силовых факторов в комбинированной
системе? ( 22 )
_____________________________________________________________
*)
Только в режиме «Показ слайдов»