















 industry
industrySimilar presentations:





")



")
Автоматизация процессов дробления
1.
12 Автоматизация процессов дробленияКонусная
дробилка
крупного
дробления
ККД-900
2.
12 Автоматизация процессов дробленияВид
конусной
дробилки
в разрезе
3.
12 Автоматизация процессов дробленияКонусная
дробилка
крупного
дробления
ККД-900
4.
12 Автоматизация процессов дробления5.
12 Автоматизация процессов дробленияАвтоматика дробильных установок должна обеспечивать:
а) контроль уровня горной массы в приемном и
загрузочном бункерах;
б) контроль за параметрами смазки;
в) управление пуском двигателей;
г) регулирование загрузки дробилки.
6.
12 Автоматизация процессов дробленияПроцесс дробления как объект управления
Управляемые
величины
Мощность
электропривода,
потребляемая
при
дроблении; уровень
материала в пасти
дробилки
Управляющие
параметры
Производительность
дробилки по исходной
руде; частота качаний
подвижного
элемента
дробилки;
ширина
разгрузочной щели
Возмущающие
параметры
Гранулометрический
состав
и
физикомеханические свойства
исходной руды.
Износ
футеровки
дробилки
7.
12 Автоматизация процессов дробленияПри автоматическом управлении процессом дробления
используют следующие принципы:
а) стабилизация производительности дробилки по исходной
руде изменение частоты вращения привода питателя
(Q=const, n = var)
б) стабилизация мощности, потребляемой электроприводом
дробилки, изменением частоты вращения привода питателя
(P=const, n = var)
в) стабилизация суммарного сигнала производительности и
мощности с воздействием на частоту вращения привода
питателя (Uq+Up=const, n=var)
г) стабилизация уровня руды в пасти дробилки с
воздействием на частоту вращения привода питателя
(H=const, n=var).
8.
12 Автоматизация процессов дробленияа
б
LE
LE
1-1
1-1
1
1
2
2
3
4
LE
4
2-5
2-7
2-5
EE
~
~
EE
H
LA
1-2
L
NS
FC
ЕI
2-4
2-3
2-2
H
FE
2-1
2-1
2-2
5
H
LA
1-2
NS
FC
Y
2-6
2-4
2-3
L
H
Схемы автоматизации процесса дробления
а – по потребляемой мощности; б – по удельному расходу энергии
1 – бункер; 2 – питатель пластинчатый; 3 – грохот; 4 – дробилка конусная; 5 - конвейер
9.
12 Автоматизация процессов дробленияРадарный уровнемер УЛМ-31А1
Максимальная
абсолютная
погрешность
измерения
уровня
Диапазон
измерения
уровня
Цифровой
интерфейс
Аналоговый
выход
Дискретные
выходы
±3мм
0,6 ÷ 30м
RS485,
Modbus
4-20 мА
2 контактные
группы реле
10.
12 Автоматизация процессов дробленияПринцип действия радарного уровнемера.
11.
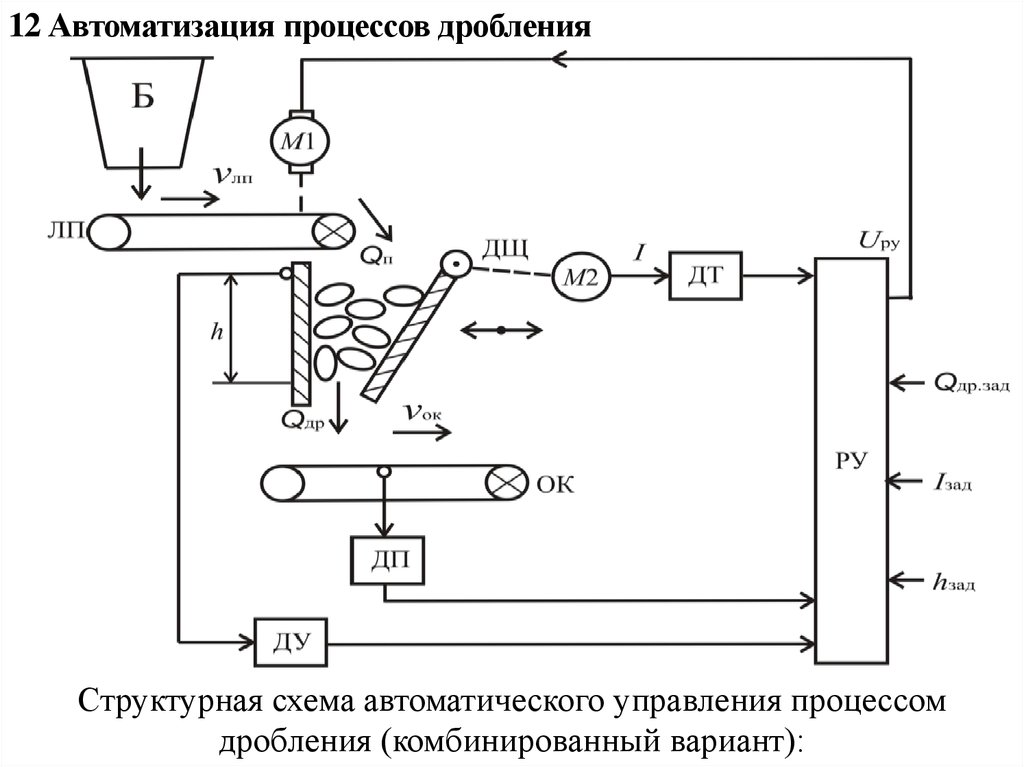
12 Автоматизация процессов дробленияСтруктурная схема автоматического управления процессом
дробления (комбинированный вариант):
12.
12 Автоматизация процессов дробленияЩековая дробилка
13.
12 Автоматизация процессов дробленияПринцип работы щековой дробилки
14.
12 Автоматизация процессов дробленияПереходные процессы в дробилке, работающей с постоянной
частотой ω и амплитудой А качания щеки, можно описать,
используя уравнение материального баланса:
где
– производительность соответственно
дробилки и питателя, т/ч; М – запас материала в дробилке, т.
15.
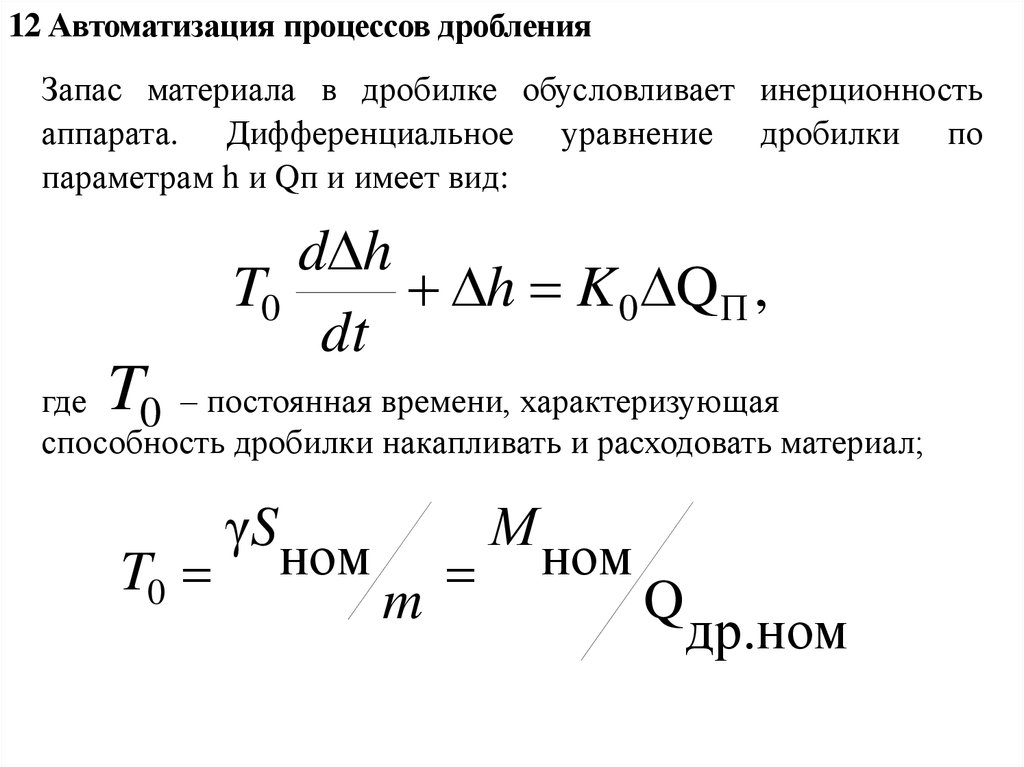
12 Автоматизация процессов дробленияЗапас материала в дробилке обусловливает инерционность
аппарата. Дифференциальное уравнение дробилки по
параметрам h и Qп и имеет вид:
d h
T0
h K 0 Q П ,
dt
T
где
0 – постоянная времени, характеризующая
способность дробилки накапливать и расходовать материал;
T0
γS
ном
m
М
ном
Q
др.ном
16.
12 Автоматизация процессов дробленияγ – плотность материала, т/м3;
Sном – площадь верхнего сечения пасти дробилки, м2;
m
Q
др
– коэффициент пропорциональности, определяемый
h
статической характеристикой дробилки;
K0=l/m – передаточный коэффициент.
Зависимость Qдр h нелинейна и имеет ограничения
по уровню hmax и производительности Q др max
при данных частоте вращения вала и амплитуде А колебаний
щеки дробилки.
17.
12 Автоматизация процессов дробленияСтатическая характеристика щековой дробилки
18.
12 Автоматизация процессов дробленияПередаточная функция щековой дробилки по каналу Qп – h
имеет вид:
Передаточная функция дробилки по каналу Qп – Qдр с учетом
Запаздывания
, обусловленного способом измерения Qдр с
помощью датчика производительности, установленного на
отгружающем конвейере на некотором расстоянии lдп от
разгрузочной щели дробилки, может быть представлена
выражением
Где
- скорость движения ленты отгружающего
конвейера, м/с; lдп – расстояние установки датчика ДП.
19.
12 Автоматизация процессов дробленияАлгоритмическая структурная схема системы
автоматического регулирования процесса дробления