

















 warfare
warfareSimilar presentations:


")


")
")

")
")
Загальні відомості про РЛС П-18М
1.
МОДУЛЬ ВП 4.5БУДОВА І ПРИНЦИП РОБОТИ РЛС П-18М
Тема 1.
Загальні відомості про РЛС П-18М.
Заняття №1. Загальні відомості про РЛС П-18М.
2.
Питання заняття1. Призначення, склад і бойові можливості
"МАЛАХИТ".
2. Склад апаратури РЛС.
3. Принцип роботи РЛС за функціональною схемою.
РЛС
3.
Призначення, склад і бойові можливості РЛС"МАЛАХИТ"
Наземна РЛС П-18М призначена для:
спостереження за повітряним простором або заданим
сектором поверхні води (землі);
автоматичного виявлення цілей у складних перешкодових
умовах;
визначення з високою точністю азимуту, дальності і
радіальної швидкості цілей;
автоматичного супроводу кожної з виявлених цілей по цих
параметрах;
супроводу траси цілей;
автоматичної передачі даних супроводжуваних цілей
споживачам РЛІ.
4.
РЛС використовується:у якості автономного засобу цілевказівки по азимуту і
похилої дальності;
для виявлення цілей при спільній роботі з іншими РЛС;
для виявлення цілей у складі автоматизованих систем
управління.
5.
Склад РЛС П-18М:станція апаратна з радіоелектронною апаратурою,
вторинними джерелами електроживлення, апаратурою
спряження з висотоміром РРВ-16А и НРЗ, контрольновимірювальною апаратурою, апаратурою телефонного і
гучномовного зв'язку (ГМЗ), кондиціонерами, апаратурою
топопривязки і радіостанцією;
машина з антенно-щогловим пристроєм і дизельної. До
складу АЩП входять електродвигун привода обертання,
електролебідка і котушки із джгутами. До складу дизельної
входять агрегати живлення, розділовий трансформатор і щит
силовий ЩС.
До РЛС надаються:
комплект експлуатаційної документації;
комплект одиночного ЗМП.
Примітка. Апаратура топопривязки, спряження з
висотоміром, і радіостанція комплектуються за заявкою.
6.
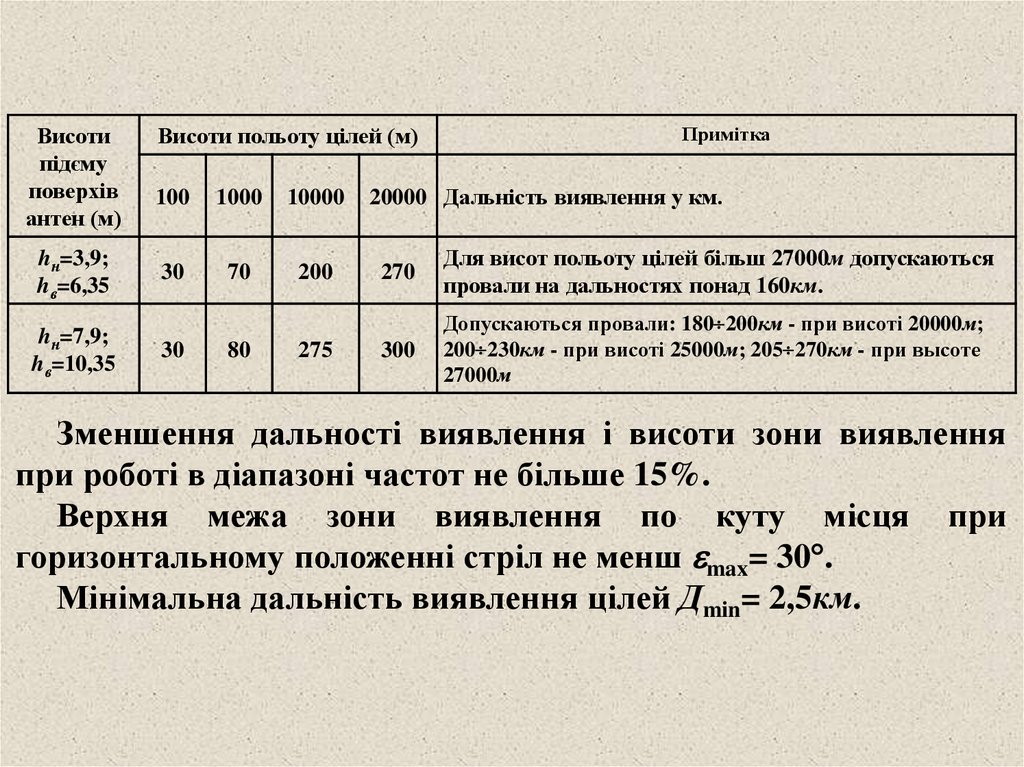
Бойові можливості РЛС П-18М.Зона огляду.
Дальність виявлення цілі при розгортанні РЛС на рівному
майданчику радіусом не менше 500м, з кутами закриття не
більше 15 хвилин, при горизонтальному положенні стріл
(можлива зміна положення стріл у вертикальної площині), на
частоті 160МГц (можлива зміна несучої частоти РЛС), по
одиночним літакам типу МІГ-21, з ймовірністю 0,8, при польоті
на РЛС у відсутності перешкод залежить від висоти підєму
антени і наведена у таблиці.
7.
Висотипідєму
поверхів
антен (м)
hн=3,9;
hв=6,35
hн=7,9;
hв=10,35
Висоти польоту цілей (м)
100
1000
10000
30
70
200
30
80
275
Примітка
20000 Дальність виявлення у км.
270
Для висот польоту цілей більш 27000м допускаються
провали на дальностях понад 160км.
300
Допускаються провали: 180 200км - при висоті 20000м;
200 230км - при висоті 25000м; 205 270км - при высоте
27000м
Зменшення дальності виявлення і висоти зони виявлення
при роботі в діапазоні частот не більше 15%.
Верхня межа зони виявлення по куту місця при
горизонтальному положенні стріл не менш max= 30 .
Мінімальна дальність виявлення цілей Дmin= 2,5км.
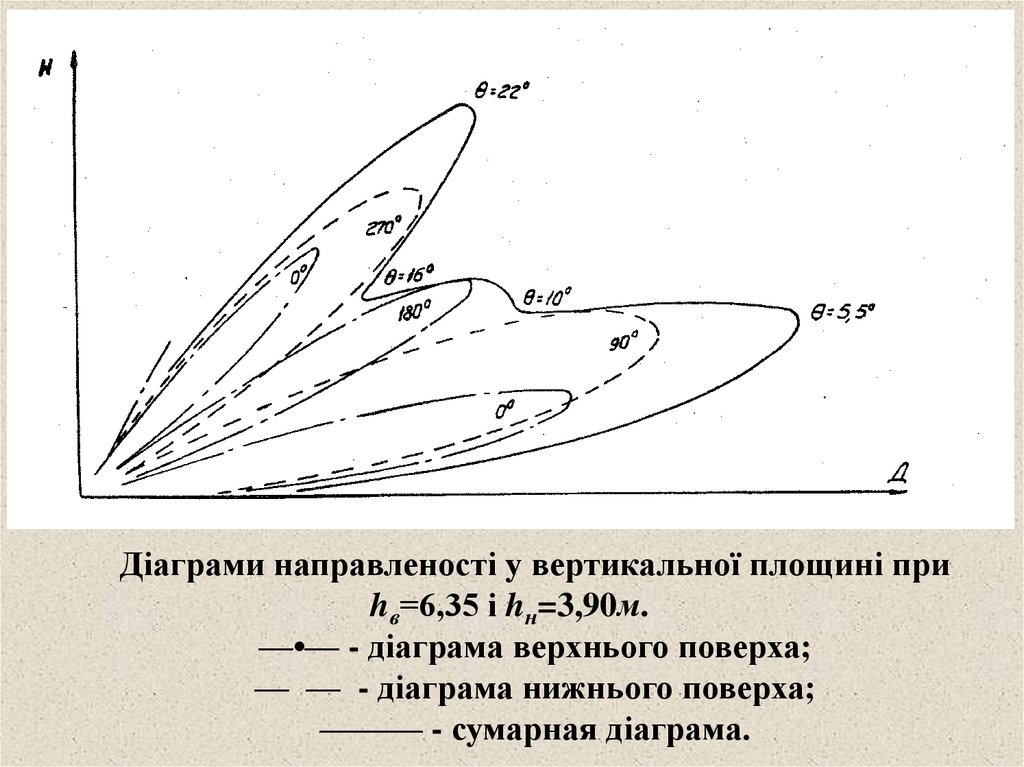
8.
Діаграми направленості у вертикальної площині приhв=6,35 і hн=3,90м.
—•— - діаграма верхнього поверха;
— — - діаграма нижнього поверха;
——— - сумарная діаграма.
9.
Діаграми направленості у вертикальної площині при hв=10,35 іhн=7,90м.
—•— - діаграма верхнього поверха;
— — - діаграма нижнього поверха;
——— - сумарная діаграма.
10.
Діаграми направленості у вертикальної площині при hв=8,35 іhн=5,90м.
—•— - діаграма верхнього поверха;
— — - діаграма нижнього поверха;
——— - сумарная діаграма.
11.
Точність вимірювання координат.Середньоквадратичні відхилення помилок визначення
координат цілей в умовах відсутності перешкод, не більше:
по дальності 100м;
по азимуту 0,4 ;
по швидкості 10м/с.
Роздільна здатність по координатам.
по дальності 450м;
по азимуту на дальностях більш 50км в діапазоні частот
6 8 .
12.
Перешкодозахищеність.Зменшення дальності і висоти зони виявлення цілей у зоні
дії пасивних перешкод типу “Лента У-2М” щільністю 5 пачок
на 100м шляху, на частоті 160МГц не більше 15%;
- в діапазоні частот не більше 30%.
Зменшення дальності і висоти зони виявлення цілей при
активних перешкодах з дальності 200км з еквівалентною
спектральною щільністю потужності 80Вт/МГц по бічних
пелюстках діаграми направленості РЛС при роботі на частоті
160МГц і одиночному постановнику перешкод не бельше 40%;
-при двох постановниках перешкод, рознесених по
азимуту на кут не менше ширини діаграми
направленості РЛС не більше 50%;
-в диапазоніе частот 30%.
Коефіцієнти подавлення перешкод:
- місцевих предметів Кмп=40дБ;
- активних шумових перешкод Кашп=25дБ.
13.
Інформаційна здатність.Кількість одночасно супроводжуваних цілей не менш 256.
Пропускная способность аппаратуры автоматической
передачи данных 256 цілей за 10сек.
Апаратура передачі даних забезпечує передачу інформації
про 256 супроводжуваних цілях зовнішнім споживачам:
по чьотирьохдротової виділеної лінії за допомогою модему зі
швидкістю передачі не менше 9600бод на відстань не більше
12км;
по інтерфейсу RS 422 на відстань не більше 1,2км.
14.
Надійність.Термін служби до планового заводського ремонту 10 років
або 10000 годин.
Ресурс (срок службы), 20 років.
Маневрені характеристики.
час розгортання (згортання) РЛС розрахунком з 5 чоловік
60хв.
Час підйому або опускання антени електролебідкою 5хв.
Час включення РЛС (при прогрітих агрегатах), 120сек.
Середня швидкість руху при транспортуванні РЛС:
- по грунтових дорогах 25км/год;
- по шосейних дорогах 40км/год.
15.
Склад апаратури РЛСВиріб складається з окремих приладів і блоків, кожному з
яких привласнено умовне цифрове позначення. До складу
станції апаратній входять:
передавач прилад М2.1;
антенний комутатор блок ВЧ М;
приймач прилад М3.1;
пульт оператора прилад М5.1;
виносной пульт оператора прилад М5.2;
прилад
спряження
з
наземним
радіолокаційним
запитувачем прилад М6.1;
блок розподілу, захисту і контролю електроживлення блок
М34;
блок управління приводом антени блок БУА;
16.
апаратура телефонного і гучномовного зв'язку;перехідний щит станції апаратній ПЩА;
санітарний вентилятор;
кондиціонер;
конвектор електричний;
приймач GPS.
17.
До складу машини з АЩП входять:антена блок 1;
привод обертання антени блок 31М;
блок управління лебідкою блок БУЛ;
пульт управління лебідкою;
щит силовий ЩС;
розділовий трансформатор блок ТР;
агрегати живлення.
18.
Принцип роботи РЛС за функціональноюсхемою
Зондувальні імпульси ВЧ виробляються в модулі
формування зондувальних сигналів ФЗС.03, підсилюються
передавальним пристроєм і випромінюються в простір
антеною. Цією же антеною приймаються відбиті від цілі
сигнали, які підсилюються приймальним пристроєм,
розкладаються на квадратурні складові, перетворюються в
цифровий код у модулі цифрової обробки сигналів ЦОС.04,
проходять через оптимальний фільтр, пристрій захисту від
перешкод і надходять у пристрій первинної обробки РЛІ, де в
автоматичному режимі визначаються координати відміток
цілей, які відображаються на екрані відеомонітора.
Із пристрою первинної обробки РЛІ координати відміток
цілей надходять у пристрій вторинної обробки, де здійснюється
автоматична або напівавтоматична зав'язка траєкторій і
супровід виявлених цілей.
19.
Функциональная схема РЛСНапряжение двигателя 3~380 В
Команды управления
Команда
на отключение тормоза преобразователем частоты
Перегрев двигателя
Двигатель
наклона
RS - 422 (Линия 11)
Плата УП ПЧ
Низкочастотный
Команды управления (вверх, вниз)
токосъемник
Плата управления преобразователем частоы
Сигнал датчика угла наклона
Датчик
угла наклона
Прибор М5.1
Компьютер
Аппаратный
пульт оператора
RS- 422
(Линия 8,
Линия 2,
Линия 13)
Вкл. ант.
Прибор
М6.1
Модуль
интерфейсов
RS- 422
(Линия 1)
RS - 232 (Линия 7)
RS- 422
(Линия 1)
Компенсационные антенны
RS - 485
(Линия 5)
RS - 485
(Линия 5)
RS- 422
(Линия 8)
Сигнал
RS - 232 (Линия 4)
Модуль У.03
Упр.F
Код F
Синхр. F
Запись F
Коды адреса,
коды данных
Сигнал
Гт.
Синхронизация,
+24 В
Данные
Синхр.
ПРМ/ПРД
ПРМ/ПРД АМ
ПРМ/ПРД ЛЧМ
Модуль контроля
ПЧ
Модуль ФКС.02
КГ (25 МГц)
Формирователь
контрольных сигналов
Модуль
ЦОС.04
Прибор
управления
НРЗ
Код азимута,
Готовность азимута
Такты азимута
ПРМ/ПРД TTL
Блок М3.1.1
Передатчик
Зондирующий
сигнал
Модуль СЧ.02
Синтезатор частот
Модуль КГ.04
Модуль С.05
Гт.
КГ
25 МГц
КГ
25 МГц
Когерентный
гетеродин
Запуск 64
Система цифровой обработки
и отображения радиолокационной
информации (ЦООРИ)
Прибор
М5.2
25 МГц
Контроль 6
Упр.F
Зондирующий
сигнал
Синхронизатор
Модуль ФЗС.03
Формирователь
зондирующего
сигнала
Блок М3.1.3
Модуль ВИП.02
Гт
Модуль защиты
Вкл. антенны
(Линия 1)
Устройство
управления
ЛЧМ
Импульс
запуска АМ
Разрешение
контроля
RS - 422
RS - 485
(Линия 5)
Выносной
пульт оператора
(прибор вторичной
обработки информации)
Компьютер
Модуль
интерфейсов
RS-232
(Линия 10)
Модем
На автоматизированный
командный пункт (АКП)
Прибор М2.1
Модуль
СВ.04
Имп. синхрониз.
Модуль К.02
Откл. пит. ПРД
Устройство
управления
ПЧ
Приемник
ПРМ/ПРД
Контроль 6
Вкл. антенны
Имп. синхрониз.
Модуль ПРМ.04
Упр. F
ПРМ/ПРД АМ
ПРМ/ПРД ЛЧМ
Код
режима
РРУ
Строб М
Откл.
пит. ПРД
Блок ВЧ М
Коммутатор
RS - 485
(Линия 5)
Излучение
Модуль управления
Автостроб
Сигнал
Модуль
ОС.02
Код азимута,
Готовность азимута
Такты азимута
Прибор
АКАП4-02
ВПУ
АПУ
Модуль
защиты
Прибор М3.1
RS- 422
(Линия 1)
RS - 422 (Линия 1)
Высокочастотный
токосъемник
Делитель
входной
Сигнал
Преобразователь частоты
Электродвигатель
вращения
Редуктор
наклона
RS - 485 (Линия 5)
Антенна
Блок БУА
Тормозной
выпрямитель
RS - 422 (Линия 1)
Редуктор
вращения
Данные
Отключение тормоза
Тормоз
Блок 1
Приемник
GPS
Данные
К прибору М5.2
(при установке вне
станции аппаратной)
Сигналы
управления НРЗ
RS - 485 (Линия 5)
Цифровой
датчик азимута
К экстракторам ЭПРВ
ПРВ1 ПРВ2
RS - 422 (Линия 2)
Синхронизация,
+24 В
Сигналы
управления высотомером
Система вращения
и наклона антенны
(СВА)
Синхронизация,
+24 В
Сельсин- датчик
Привод вращения
антенны
50 Гц 380 В
Блок 31М
3~50 Гц 380 В
Антенно-фидерная
система
От электростанции
RS - 422 (Линия 13)
Напряжение
синхронизации ~110 В с НРЗ
к НРЗ
20.
Антенно-фідерна система складається з антени із системоюрозподілу потужності на випромінювачі (блок 1), щоглового
пристрою, високочастотного струмознімача і блоку ВЧ М
(комутатору).
Антена формує зону виявлення станції, в який
забезпечується спостереження за повітряною обстановкою,
виявлення і проводка цілей і яка залежить від висоти підйому
антени та рельєфу місцевості, на якій розгорнута РЛС.
Щогловий
пристрій
є
механічною
опорою,
що
використовується для підйому антени.
Високочастотний струмознімач здійснює передачу енергії
від нерухливого лінійного фідера до фідерного тракту, що
обертається разом з антеною.
Блок ВЧ М служить для автоматичного перемикання
антенно-фідерної системи з передачі на прийом та назад і
забезпечує захист приймального пристрою від потужних
імпульсів передавача (зондувальних імпульсів).
21.
Передавальний пристрій формує потужні імпульси енергіївисокої частоти в робочому діапазоні частот.
До складу передавального пристрою входить формувач
зондувального сигналу (модуль ФЗС.03, розташований у блоці
М3.1.1 приладу М3.1) і твердотільний транзисторний
підсилювач потужності (прилад М2.1).
Вмикання передавального пристрою і вибір його режимів
запуску проводиться із приладу М5.1 натисканням клавіші
“ИЗЛУЧ“ і одного з перемикачів (“СИММЕТР“, “ВОБУЛ 2“
або “ВОБУЛ 4“) у групі “ЗАПУСК ПРД“ відповідно.
22.
Приймальний пристрій здійснює підсилення і перетворенняслабких відбитих від цілей сигналів (відлуння), що надійшли з
антени, до величини, достатньої для їхньої обробки в приладі
М5.1. До складу приймального пристрою входить модуль
ПРМ.04.
Система цифрової обробки і відображення радіолокаційної
інформації (ЦОВРІ) містить у собі прилади М5.1 і М5.2.
Прилад М5.1 виконує первинну обробку відеосигналу РЛС,
відображає результати обробки на індикаторі і передає їх у
прилад М5.2.
23.
Прилад М5.2 виконує:вторинну обробку інформації, що прийнята з приладу М5.1;
відображає результати обробки на індикаторі;
формує заявки на вимір висоти на висотомір (“ПРВ“, РРВ) і
заявки для визначення державної приналежності об'єктів, що
виявляються, на НРЗ;
ухвалює цифрові дані із РРВ і НРЗ, формує масиви
цифрових даних по супроводжуваних цілям і передає їх на
віддалений КП;
приймає команди від КП і відповідає повідомленнями.
Прилад М5.2 може бути винесений зі станції апаратної на
віддалений пост, на відстань від РЛС до 500м (1000м - опція).
24.
Система управління і контролю призначена для управліннярежимами роботи РЛС, сигналізації про включені режими,
контролю працездатності виробу і пошуку несправностей з
точністю до змінного модуля.
Система складається з апаратного пульта управління
(прилад М5.1), призначеного для управління станцією зі
станції апаратній, виносного пульта управління (прилад М5.2),
а також модулів: контролю К.02, управління У.03, формувача
контрольних сигналів ФКС.02, і індикаторів блоку М3.1.3
приладу М3.1.
25.
Система передачі азимута призначена для передачі насистеми станції напруг (або кодів), відповідних до положення
антени по азимуту.
Система складається із цифрового датчика азимута М3
блоку 31М, модуля СВ.04, модуля ЦОС.04 і процесорного
модуля комп'ютера, що входять до складу приладу М5.1.
Апаратура захисту від перешкод складається із пристрою
захисту від пасивних перешкод (модуль ЦОС.04, що входить до
складу приладу М5.1), пристрою захисту від активних
перешкод (прилад АКАП4-02А) і пристрою захисту від
імпульсних несинхронних перешкод.
Система перебудови частоти (СПЧ) служить для швидкої
зміни робочої частоти зондуючого сигналу.
26.
Пристрій синхронізації призначений для формуванняімпульсів запуску і забезпечення узгодження в часі роботи
апаратури станції (модуль С.05).
Система обертання і нахилу антени служить для обертання
антени в азимутальній площині і нахилу стріл антени у
вертикальній площині. Система містить у собі привод
обертання і нахилу антени (блок 31М) і блок управління
приводом антени (блок БУА).
Система спряження з іншими виробами призначена для
забезпечення спільної роботи РЛС П-18 “Малахит“ із
запитувачем 1Л22 і одним або двома радіовисотомірами “ПРВ16А”. До складу системи спряження входить прилад М6.1, що
забезпечує спряження із запитувачем.