






 physics
physicsSimilar presentations:
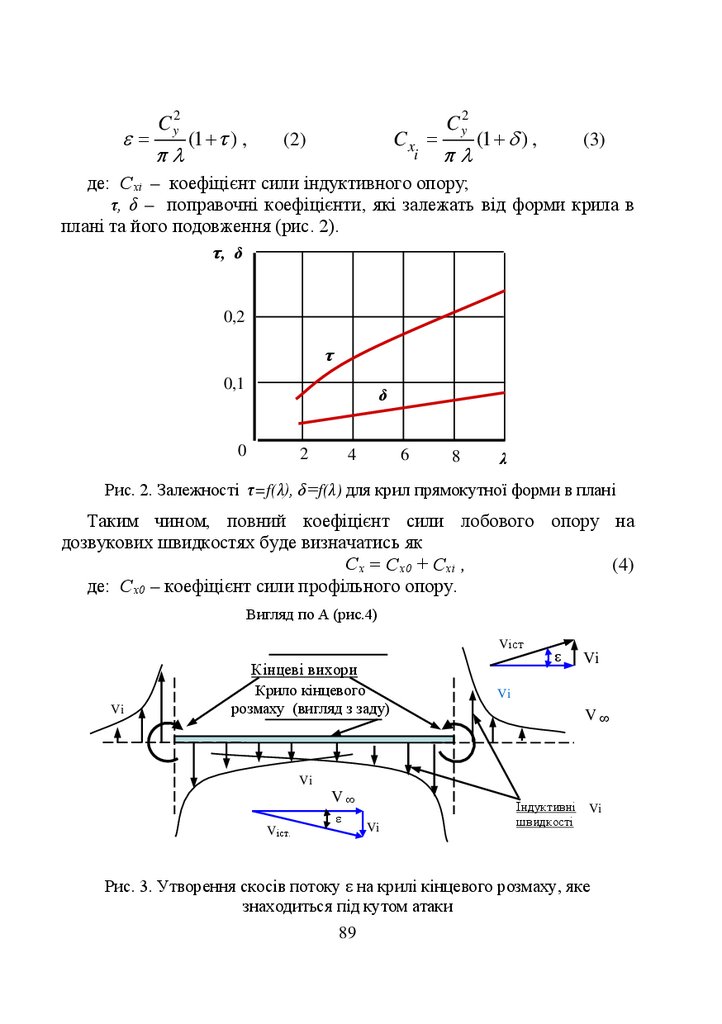
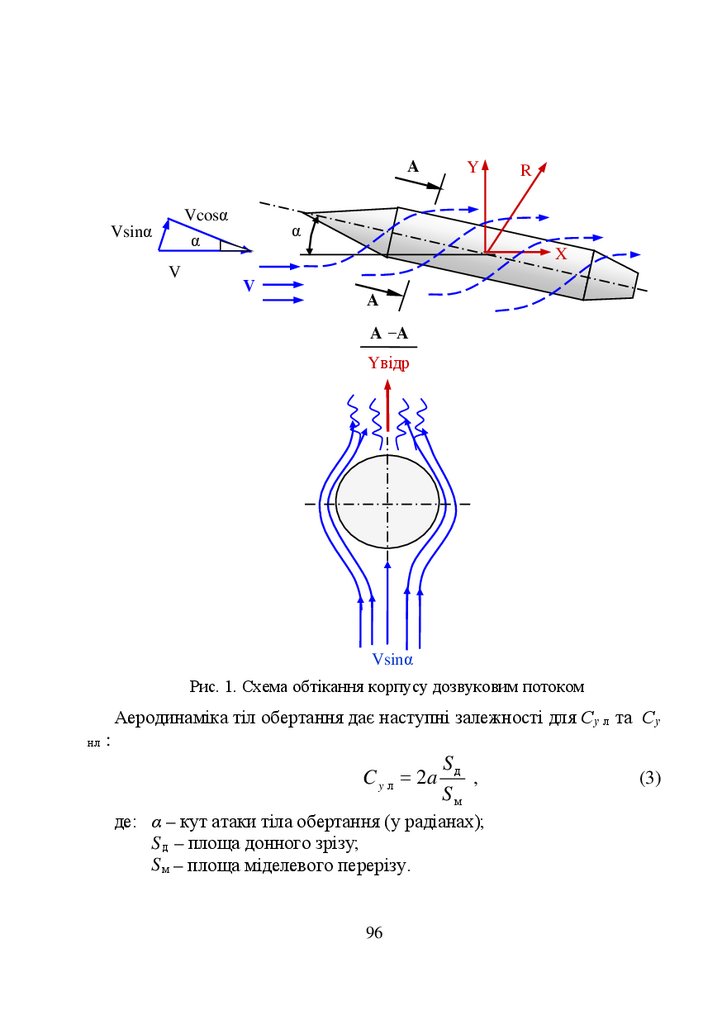
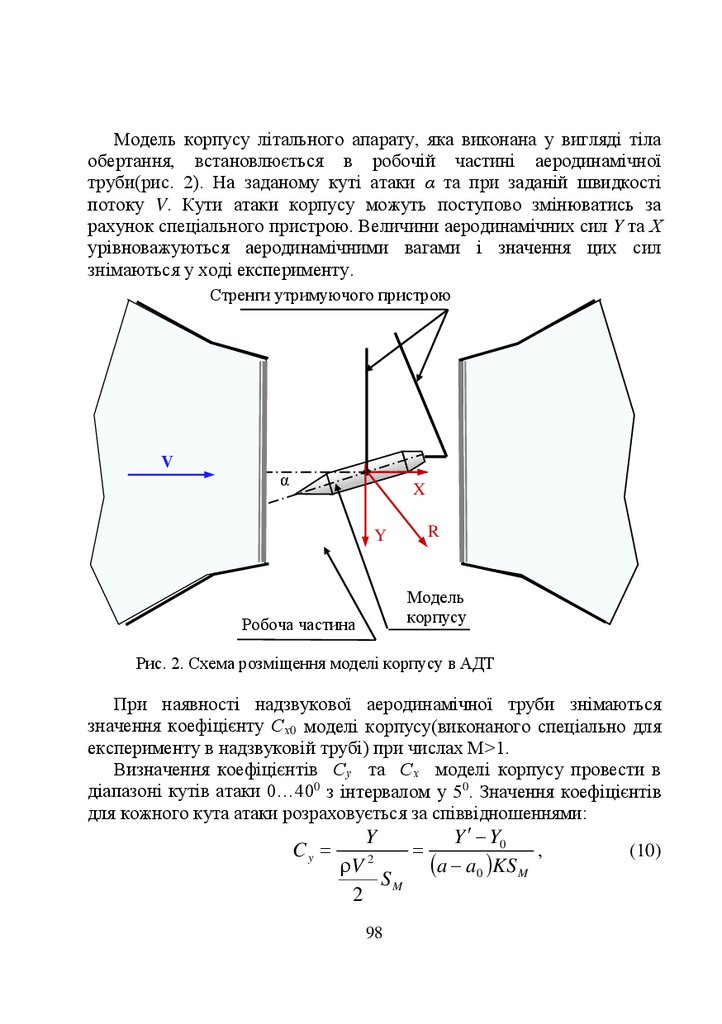
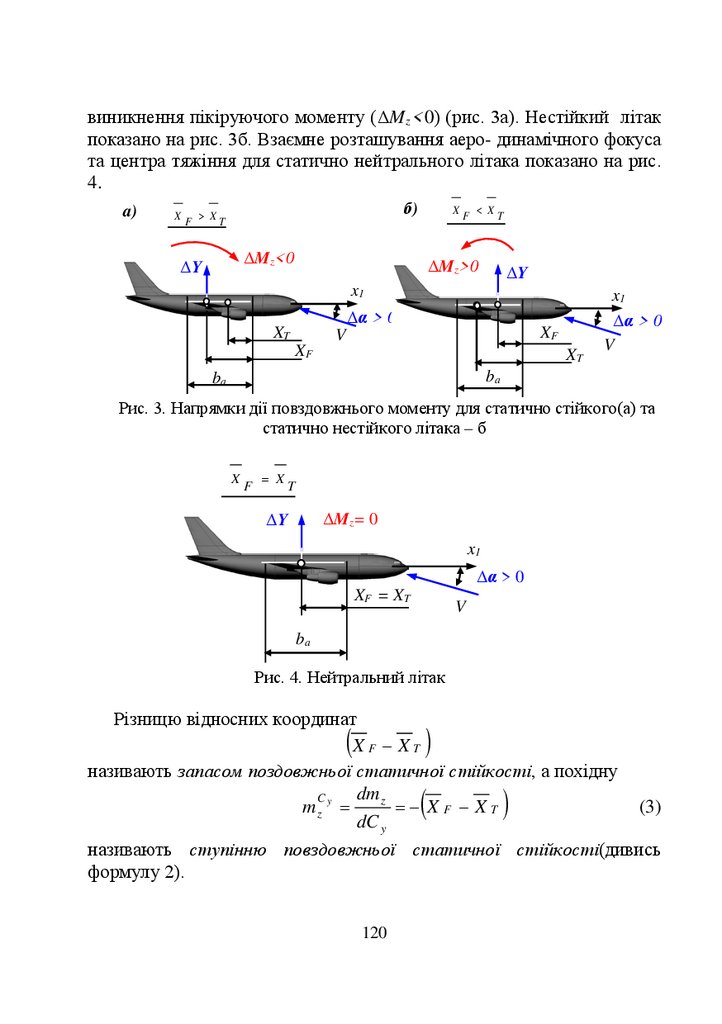
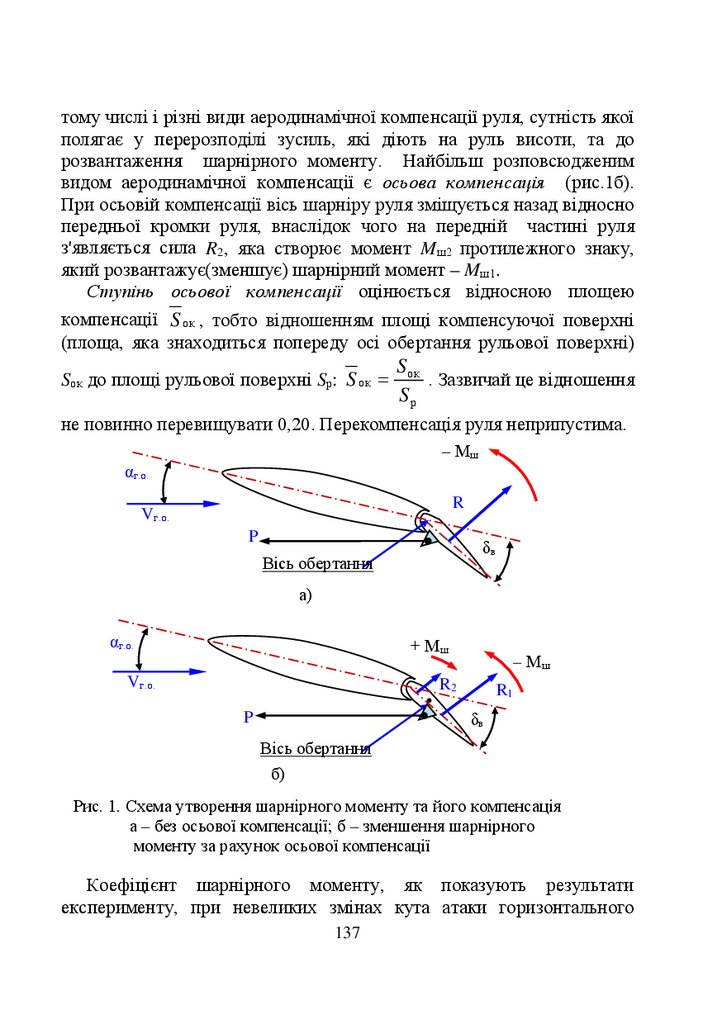
")
")
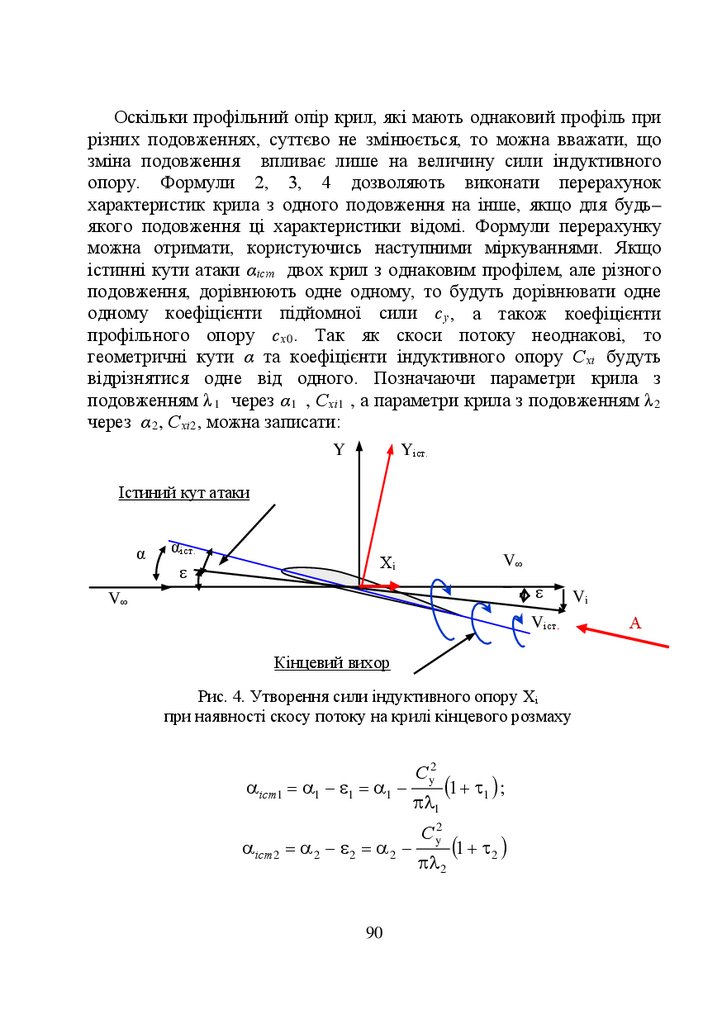
")
")
")

")
")
")

О.М. Трюхан. Експериментальна аеродинаміка
1.
КИЇВСЬКИЙ ІНСТИТУТВІЙСЬКОВО - ПОВІТРЯНИХ СИЛ
О.М. ТРЮХАН
КИЇВ
1
2.
УДК 629.735.015.3; 629.735.7;629.735.33(075.8)
ББК 053 – 01я 7
Т808
Рекомендовано Міністерством освіти і
науки, молоді та спорту України
лист №1/12-839 від 21.03.2012р.
Рецензенти: доктор технічних наук, професор Збруцький О.В.
(Національний технічний університет "Київський політехнічний інститут",
декан аерокосмічного факультету);
доктор технічних наук, професор Майборода О.М. (Державний
науково – дослідницький інститут авіації, головний науковий
співробітник);
кандидат технічних наук, доцент Чмовж В.В. (Національний
аерокосмічний університет "ХАІ", завідувач кафедри аерогідродинаміки);
Експериментальна аеродинаміка(лабораторний практикум):
Навчально-методичний посібник / О.М. Трюхан. / –К.: Транспорт,
2012, - 160с.; іл.57.
ISBN 978-966-598-759-7
Розглянуті основні положення експериментальної аеродинаміки,
установки та вимірювальна апаратура аеродинамічної лабораторії. Надані
методики підготовки, проведення та обробки результатів експериментів
щодо основних законів аеродинаміки,
визначення аеродинамічних
характеристик літаків, аеродинамічних характеристик повітряних гвинтів
та несучих гвинтів вертольотів. Велика увага надана розкриттю фізичної
суті досліджуваних явищ.
Для студентів, які навчаються у вищих навчальних закладах
авіаційного профілю III-IV рівнів акредитації за спеціальністю 7.100101
"Літаки і вертольоти", 7.100106 "Виробництво, технічне обслуговування та
ремонт повітряних суден та авіадвигунів", 7.100108 "Експлуатація
літальних апаратів", 7.100118"Системи аеронавігаційного обслуговування",
7.100408"Організація авіаційних робіт і послуг", 7.091401"Системи
управління і автоматики", 7.100107"Обладнання повітряних суден"та ін.
ISBN 978-966-598-759-7
2
© Т р ю х а н О.М. 2012
3.
ЗМІСТВступ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
стор.
3
Основні умовні позначення . . . . . . . . . . . . . . . . . . . . . . . . . .
9
Організаційно – методичні вказівки . . . . . . . . . . . . . . . . . . .
13
Аеродинамічні вимірювання, методи та прилади . . . . . . . .
18
Лабораторна робота 1. Демонстрація основних законів
руху газів та їх практичне застосування . . . . . . . . . .
Лабораторна робота 2. Градуювання приймача
повітряного тиску . . . .. . . . . . . . . . . . . . . . . . . . . . . .
Лабораторна робота 3. Визначення розподілу тиску по
поверхні кулі та циліндру . . . . . . . . . . . . . . . . . . . . .
Лабораторна робота 4. Визначення поля динамічних та
статичних тисків в робочій частині аеродинамічної
труби .. . . . . . . . . . . . . . . . . . . . . . . .
Лабораторна робота 5. Визначення характеристик
примежового шару. . . . . . . . . . . . . . . . . . . . . . . . . . .
Лабораторна робота 6. Визначення критичного числа
Рейнольдса кулі та початкової турбулентності в
аеродинамічній трубі . . . . . . . . . . . . . . . . . . . . . . . . .
Лабораторна робота 7. Визначення коефіцієнтів лобового
опору тіл різної форми . . . . . . . . . . . . . . .
Лабораторна робота 8. Визначення впливу форми крила в
плані
на
його
розподілені
аеродинамічні
характеристики . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Лабораторна робота 9. Визначення сумарних
аеродинамічних характеристик крила . . . . . . . . . . .
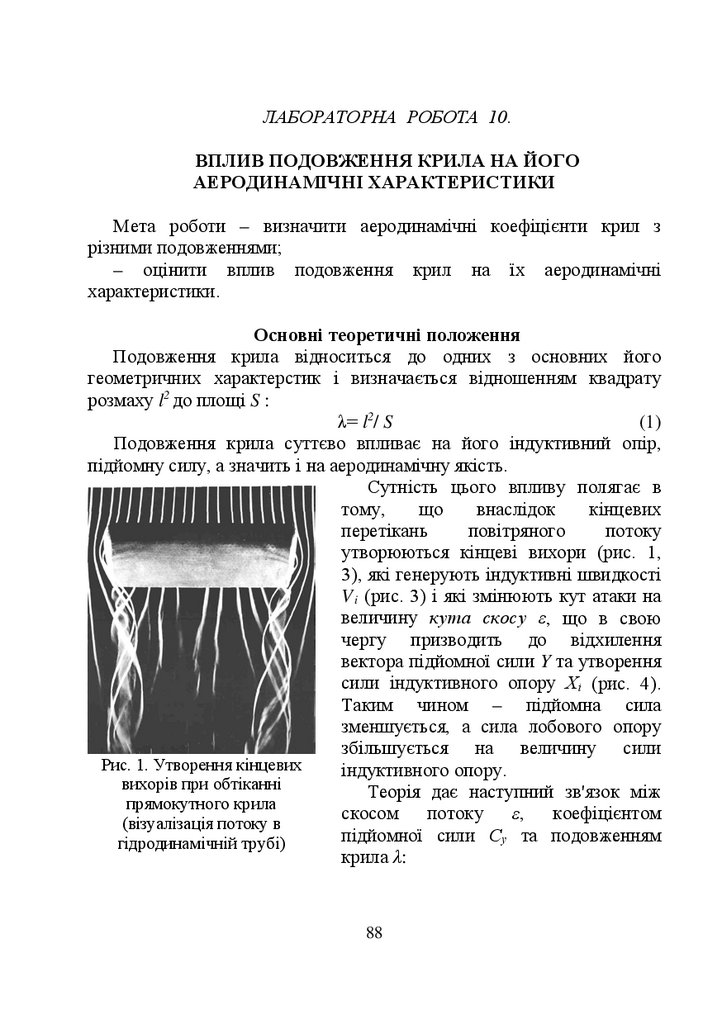
Лабораторна робота 10. Вплив подовження крила на його
аеродинамічні характеристики . .. . . . . . . . . . .
3
34
42
49
54
59
66
72
77
85
90
4.
Лабораторна робота 11. Визначення аеродинамічниххарактеристик корпусів . . . . . . . . . . . . . . . . . . . . . . .
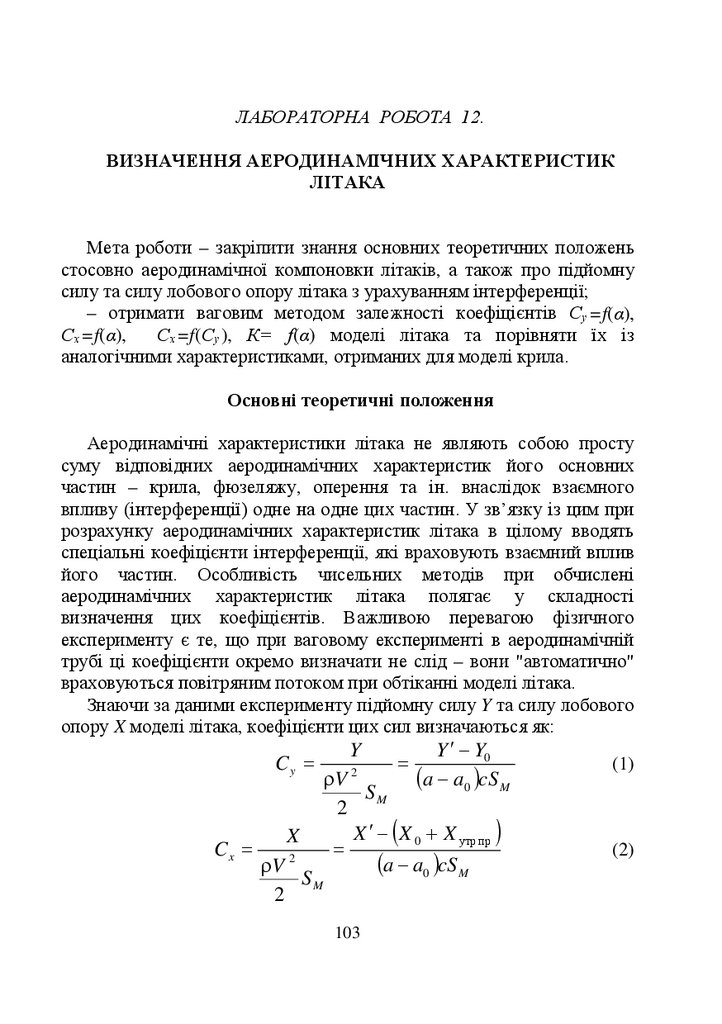
Лабораторна робота 12. Визначення аеродинамічних
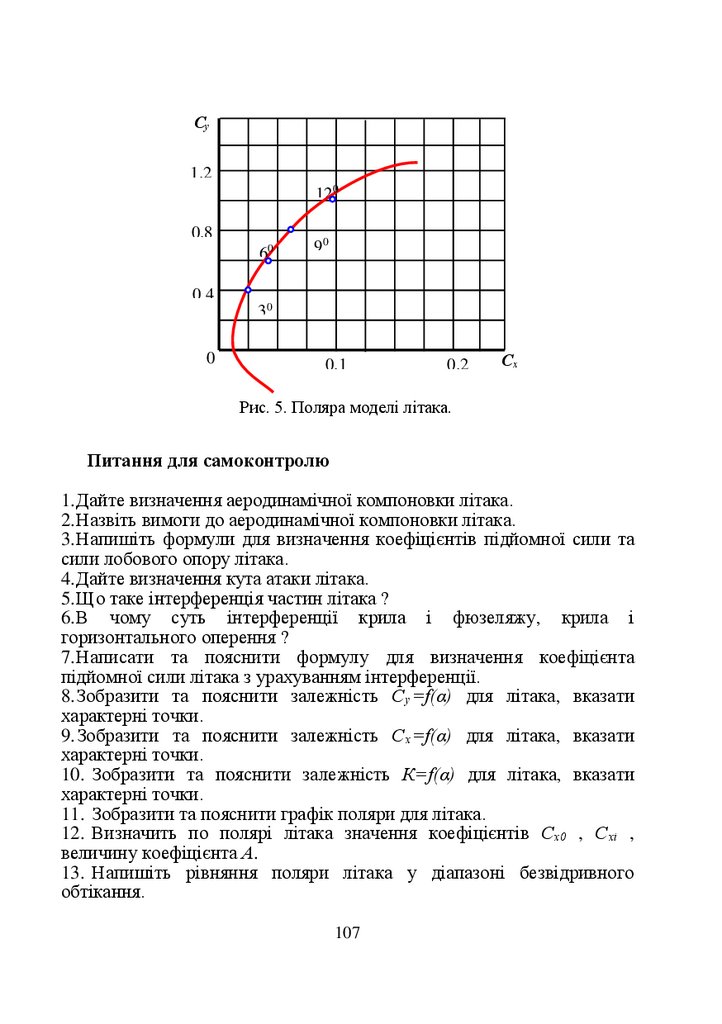
характеристик літака . . . . . . . . . . . . . . . . . . . . . . . .
Лабораторна робота 13. Визначення аеродинамічних
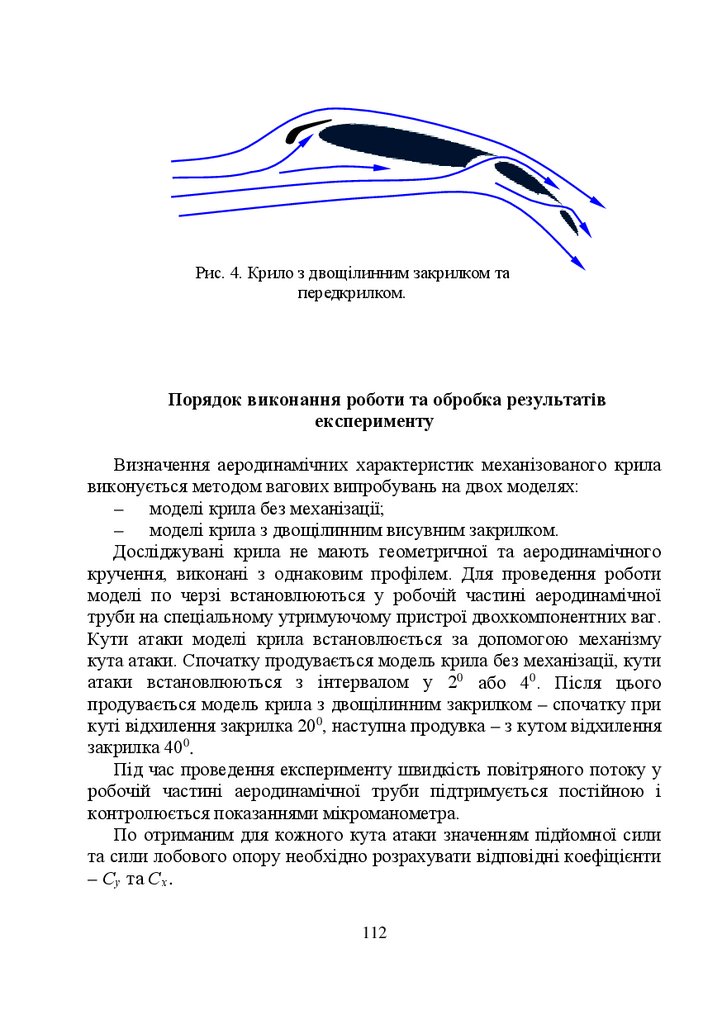
характеристик механізованого крила . . . . . . . . . . .
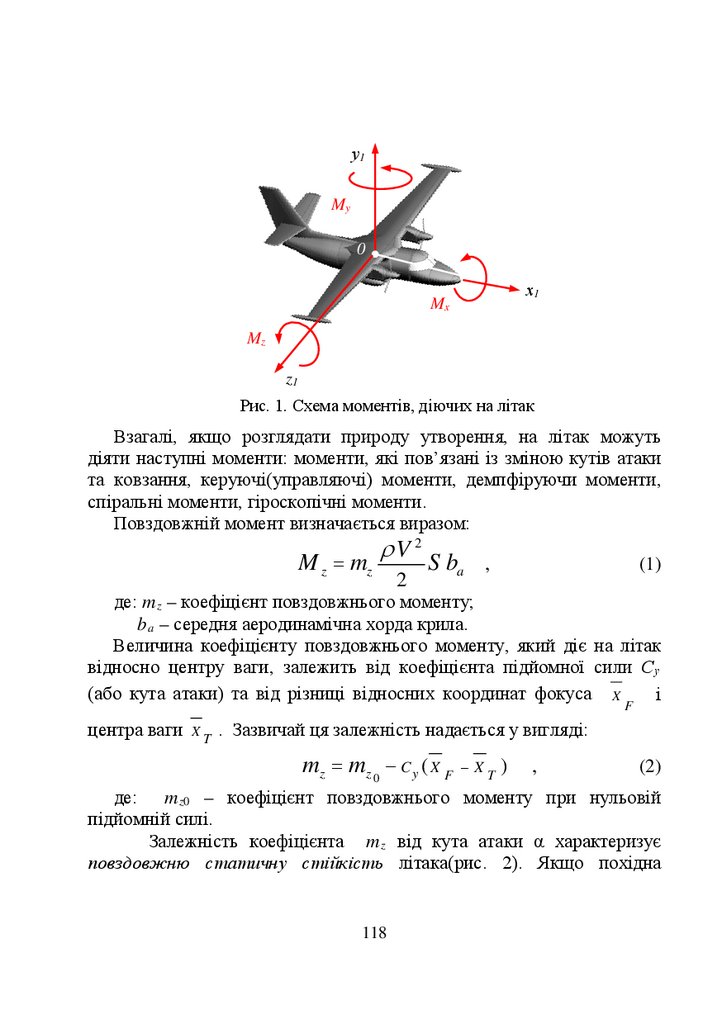
Лабораторна робота 14. Визначення поздовжнього
моменту літака .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Лабораторна робота 15. Визначення бокових моментів
літака .. . . . . . . . . . . . .
Лабораторна робота 16. Визначення шарнірного
моменту руля висоти . . . . . . . . . . . . . . . . . . . . . . . .
Лабораторна робота 17. Визначення характеристик
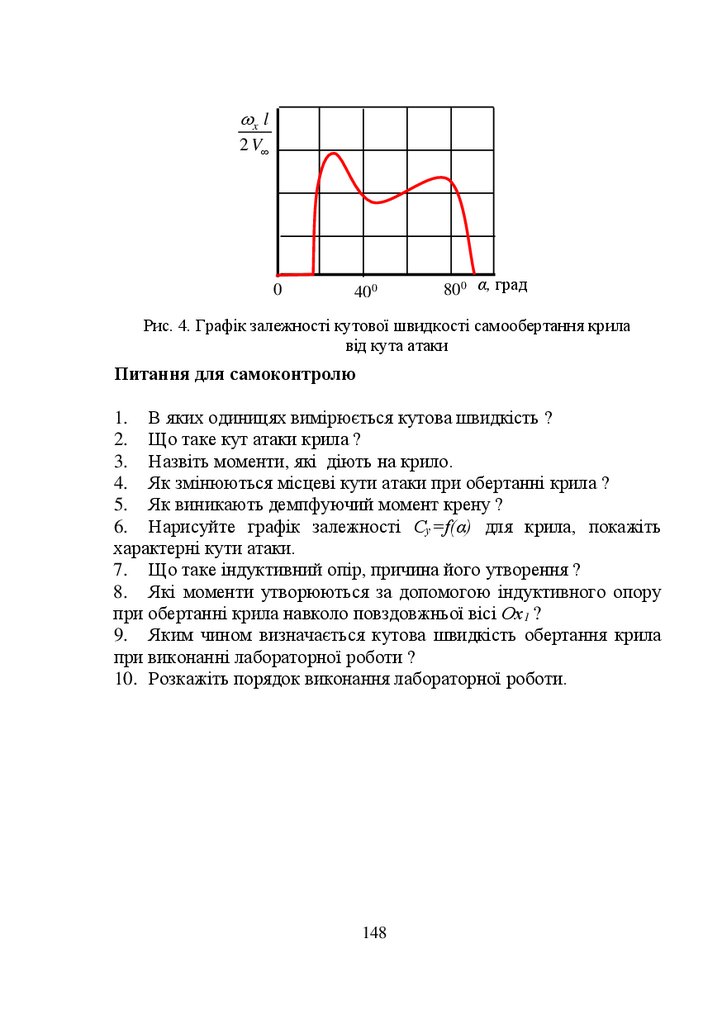
амообертання крила. . . . . . . . . . . . . . . . . . . . . . . . . .
Лабораторна робота 18. Визначення аеродинамічних
характеристик повітряного гвинта літака . . . . . . .
Лабораторна робота 19. Визначення аеродинамічних
характеристик несучого гвинта вертольота . . . . . .
Лабораторна робота 20. Визначення аеродинамічних
характеристик літака при несталому русі . . . . . . . .
96
103
109
116
124
134
141
146
154
162
Додатки. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
172
Література .. .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
181
4
5.
ВСТУПЯк у будь-якій науці, що вивчає закони природи, в аеродинаміці за
всю історію її існування впевнено
зарекомендували себе два
напрямки. Перший – напрямок строгої теорії. Виходячи з основних
положень механіки, можна дати математичні характеристики
рідинного або газоподібного середовища і намагатися потім вивести
усе більш складні закони руху рідини чисто математичним шляхом.
Другий напрямок полягає в експериментальному дослідженні
аеродинамічних
явищ,
і
результати
таких
досліджень
використовуються відповідно до потреб практики.
В експериментальній аеродинаміці студент знайомиться із
сучасними науковими методами, повинен формувати правильні
погляди на взаємодію між теорією, експериментом і практикою
льотної справи.
Викладання цього курсу повинне вестися таким чином, щоб
студент у кожній темі почував зв'язок між теорією, лабораторним
експериментом і практикою конструювання та експлуатації
літаків. При такому наданні матеріалу неминучі як повторення, так і
забігання вперед, що при словесному викладі пожвавлює курс і
підкреслює ту пов’язаність всіх питань експериментальної та
теоретичної аеродинаміки, яка є в дійсності.
Автори висловлюють вдячність викладацькому та інженерному
складу кафедри Аеродинаміки та безпеки польотів літальних апаратів
НАУ за цінні поради, зауваження, які були надані ними під час
роботи над рукописом даного посібника, та щире сприяння його
виданню.
5
6.
ОСНОВНІ УМОВНІ ПОЗНАЧЕННЯА
а
−
−
b
−
b a (b сах )
−
C
−
Ср
Сf
−
−
Сх
С у нв; С х нв;
−
−
αнв
Сх0
С х тр
Сх р
коефіцієнт відвалу поляри;
швидкість звуку; рівень рідини у
мікроманометрі;
хорда крила; плече вантажу при вимірюванні
крутячого моменту;
довжина середньої аеродинамічної хорди
крила;
відносна товщина профілю крила;
коефіцієнт тиску;
коефіцієнт тертя плоскої пластини
(односторонній);
коефіцієнт сили лобового опору крила, літака;
найвигідніші коефіцієнти підйомної сили, сили
лобового опору, кут атаки відповідно;
−
коефіцієнт сили профільного опору;
−
−
коефіцієнт сили опору тертя;
коефіцієнт сили опору тиску;
Схi
Сα
−
−
С ′у
−
коефіцієнт сили індуктивного опору;
часткова похідна коефіцієнта підйомної сили
за кутом атаки;
коефіцієнт підйомної сили перерізу крила;
у
dM
G
−
−
k
l
К
−
−
−
М
−
діаметр міделя фюзеляжу;
вага вантажу для урівноваження крутячого
моменту обертання повітряного гвинта;
показник адиабаты;
розмах крила;
аеродинамічна якість; постійна
мікроманометру;
число М польоту (число Маха);
6
7.
М крМш
Мx; Мy; Мz
−
−
−
mx; my; mz
−
C
−
критичне число Маха;
шарнірний момент рульової поверхні;
проекції аеродинамічного моменту на вісі
зв’язаної системи координат(момент крену,
рискання, тангажу);
коефіцієнти моментів крену, рискання,
тангажу;
ступінь повздовжньої статичної стійкості;
mβy
−
ступінь шляхової статичної стійкості;
mβx
N
nc
Р
р
р∞; V∞; ρ∞;
−
ступінь поперечної статичної стійкості;
−
−
−
−
потужність повітряного гвинта;
число обертів повітряного гвинта в секунду;
тяга повітряного гвинта; зусилля на штурвалі;
тиск повітря;
параметри незбуреного потоку відповідно
тиск, швидкість, щільність(густина), число М;
mz y
М∞
р*; ρ*; Т*
−
−
рi; Vi; ρ i; М i ; Тi −
R
−
Rе
S
Sм
X; Y; Z
−
−
−
Х, Y
−
Т, Н
Сх ; Сy; Сz
−
−
−
параметри гальмування потоку(швидкість
обертається в нуль);
параметри збуреного потоку в i-тій точці;
результуюча аеродинамічна сила;
універсальна газова константа; радіус гвинта;
число Рейнольдса;
площа крила;
площа міделевого перерізу фюзеляжу;
проекції результуючої аеродинамічної сили на
осі швидкісної системи координат –
відповідно сила лобового опору, підйомна
сила, бокова сила;
підйомна та пропульсивна сили несучого
гвинта;
сила тяги та повздовжня сили несучого гвинта;
коефіцієнти сили лобового опору, підйомної
7
8.
X1; Y1; Z1−
W
−
Сх 1 ; Сy 1 ; Сz 1
−
Сy го
−
х Ц.Д.
х ц.т.; (х т )
−
−
−
х F.
q
Т
t
V
Vr
α *
α0
α кр
−
сили, бокової сили;
проекції результуючої аеродинамічної сили на
осі зв’язаної системи координат, відповідно
поздовжня сила , нормальна сила, поперечна
сила;
результуюча швидкість перерізу лопаті
повітряного гвинта;
коефіцієнти повздовжньої сили, нормальної
сили, поперечної сили;
коефіцієнт підйомної сили горизонтального
оперення;
координата центру тиску крила(літака);
координата центру тяжіння літака;
координата точки переходу ламінарного
примежового шару в турбулентний;
координата аеродинамічного фокусу літака;
−
−
−
−
−
−
−
швидкісний напір;
абсолютна температура;
час; температура в С0;
істинна(повітряна) швидкість польоту;
колова швидкість перерізу лопаті гвинта;
кут атаки крила, перерізу лопаті;
кут атаки при нульовій підйомній силі;
α
−
−
критичний кут атаки;
коефіцієнт тяги повітряного гвинта;
β
γ
δ
δел; δв; δн
−
−
кут ковзання; кут притікання струменів;
коефіцієнт потужності повітряного гвинта;
−
−
−
кут крену;
товщина примежового шару;
кути відхилення відповідно елеронів, руля
висоти, руля напряму;
кути відхилення відповідно передкрилків,
закрилків;
хТ
β
δпр.;δз
−
8
9.
ευ
η
λ
−
−
−
−
μ
−
ν
φ
χ
−
−
−
χ 0.25
−
ρ
ψ
−
−
ψ
−
ω
−
z
−
кут скосу потоку за крилом;
кут тангажу;
звуження крила; ККД повітряного гвинта;
подовження крила; коефіцієнт швидкості
повітряного гвинта;
коефіцієнт динамічної в’язкості повітря;
коефіцієнт режиму роботи несучого гвинта;
коефіцієнт кінематичної в’язкості повітря;
кут установки лопаті повітряного гвинта;
кут стрілоподібності крила по передній
кромці;
кут стрілоподібності крила по лінії 0.25 хорд;
щільність(густина) повітря;
кут рискання; кут азимутального положення
лопаті несучого гвинта;
кут відхилення вантажу при визначенні
крутячого моменту гвинта;
кутова швидкість обертання повітряного
гвинта;
відносна координата пів розмаху крила.
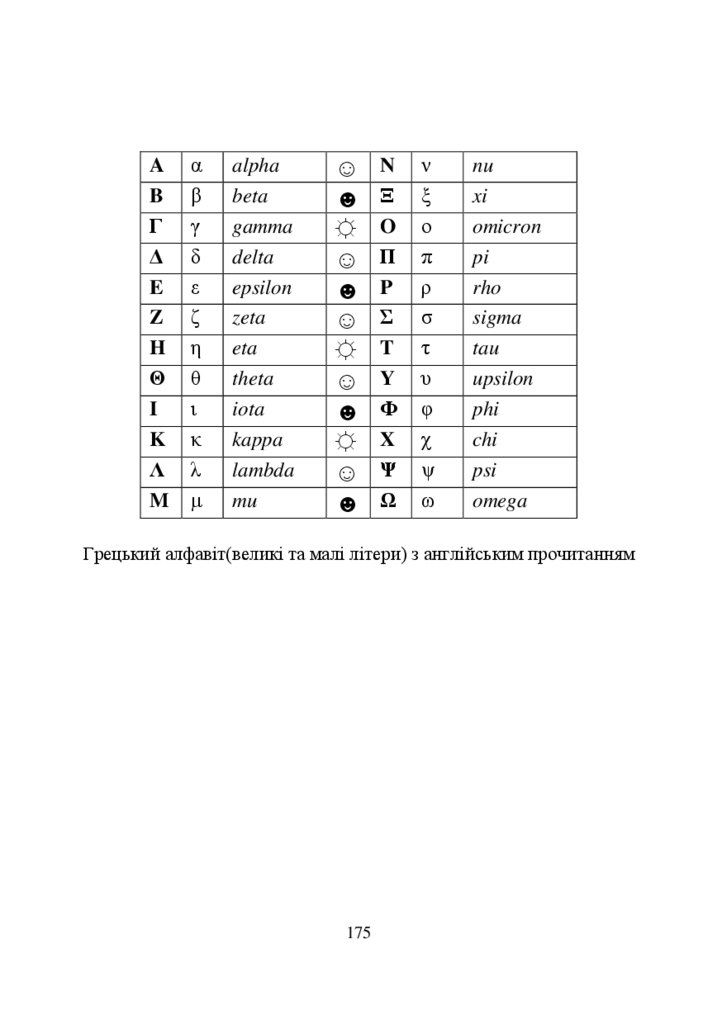
)* − прочитатання літер грецького алфавіту надано у
додатку 5.
9
10.
ОРГАНІЗАЦІЙНО – МЕТОДИЧНІ ВКАЗІВКИПризначення лабораторних занять
Важливою складовою навчального процесу, як відомо, є навчальне
заняття, в ході якого здійснюється теоретичне навчання та
прищеплення практичних навичок студентам за обраною ними
спеціальністю.
Якщо лекції, як одне з найважливіших видів навчальних занять,
повинні надавати основи наукових знань з дисципліни, що
вивчається, формувати науковий світогляд, розкривати найбільш
складні питання навчального матеріалу, то лабораторні заняття
спрямовані на прищеплення студентам практичних навичок, тобто
реалізують один з головних принципів навчання – зв'язок теорії з
практикою.
Призначення лабораторних занять при вивченні аеродинаміки
літака полягає у досягненні наступних цілей:
– закріпити студентами знання найбільш складних та важких
теоретичних положень аеродинаміки літака та його частин;
– розкрити фізичну сутність цих положень та допомогти
студентам засвоїти їх практично;
– допомогти опанувати студентами методів експериментальних та
наукових досліджень в аеродинамічній лабораторії;
– прищепити навички наукового аналізу та узагальнення
отриманих результатів;
– прищепити навички роботи з лабораторним обладнанням,
апаратурою, приладами.
Внаслідок виконання всіх робіт на лабораторних заняттях
студенти повинні
ЗНАТИ:
– основні закони, яки визначають картину обтікання літака та
його частин, прояву них у конкретних випадках обтікання, а також
чітко розуміти фізичну сутність процесів, які при цьому мають місце;
– аеродинамічні характеристики літака та його частин, їх
залежність від конструктивних та експлуатаційних факторів;
– причини виникнення кризових режимів обтікання та границі їх
розповсюдження;
10
11.
– напрямки підвищення безпеки польотів;– основні методи розрахунку аеродинамічних характеристик, які
визначають льотні можливості, стійкість та керованість літака;
– особливості
аеродинамічних
компоновок
сучасних
пасажирських та транспортних літаків, які знаходяться в експлуатації
в нашій країні та поза її межами;
ВМІТИ:
– застосовувати знання теоретичних основ аеродинаміки для
вирішення практичних інженерних задач;
– пояснювати фізичну сутність явищ, які виникають при обтіканні
літака та його окремих частин;
– аналізувати особливості впливу різних факторів на
аеродинамічні характеристики з позицій експлуатації літака у повітрі
та безпеки польоту;
– організовувати та проводити заняття з льотним та інженерним
складом експлуатуючих організацій з питань практичної
аеродинаміки;
МАТИ УЯВУ:
– щодо загальних технічних вимог, які надаються до
аеродинамічних характеристик літаків;
– про сучасні світові тенденції та напрямки розвитку аеродинаміки
транспортних літаків.
Підготовка студентів до лабораторних занять
До лабораторних занять студенти повинні ретельно готуватись,
систематично та глибоко оволодівати теоретичними основами
аеродинаміки літака.
Підготовка студентів до чергового лабораторного заняття
здійснюється самостійно та закріплюється під час самостійної роботи
в аеродинамічних лабораторіях кафедри під керівництвом викладача,
або інженера лабораторії. Підготовка включає наступні етапи:
–
вивчення програмних питань теоретичного матеріалу по
темі заняття;
–
вивчення мети роботи, її змісту та порядку виконання;
–
вивчення лабораторного обладнання, лабораторного
устаткування, об’єкта дослідження та правил техніки безпеки;
11
12.
–глибоке засвоєння фізики досліджуваного явища;
–
виконання теоретичних розрахунків, побудова теоретичних
залежностей, порівняння характеристик подібних об’єктів, складання
планів–конспектів, виступів або повідомлень (при необхідності);
–
виконання
індивідуальних
завдань
по
підготовці
лабораторного заняття та поглибленого вивчення окремих питань
теорії, які мають практичні застосування за темою даного заняття;
–
часткове оформлення звіту по лабораторному заняттю (мета
заняття, вихідні дані, розрахункова схема, робочі формули, стислий
опис фізики явища).
Про виконання цих етапів підготовки студент доповідає викладачу
або інженеру, який робить відповідну відмітку в журналі
лабораторних занять студента.
Студенти, які не підготувались до чергового лабораторного
заняття, до заняття не допускаються.
Прищеплення студентам методичних навичок
Методична підготовка студентів є однією з головних цілей
кожного лабораторного заняття і спрямована на прищеплення
навичок з організації та проведення занять з льотним та інженерним
складом авіаційних компаній цивільної авіації з питань практичної
аеродинаміки.
Прищеплення студентам методичних навичок в процесі підготовки
та проведення лабораторних занять здійснюється за наступними
напрямками:
– навчання методиці складання плану конспекту, використання
різноманітних технічних засобів навчання, написання рефератів з
найбільш актуальних питань аеродинаміки з наступним їх
заслуховуванням та обговорюванням;
– виконання конкретних індивідуальних завдань кожним
студентом та виступ з повідомленням на задану тему на
лабораторному занятті;
– поглиблене попереднє виконання лабораторного заняття
одним із призначених студентів з послідуючим роз’ясненням
студентам навчальної групи;
12
13.
– виконання обов’язків інженера-дублера та викладача-дублерапо окремим питанням навчального заняття під час підготовки до
лабораторного заняття та безпосередньо на занятті;
– вміння
контролювати
правильність
отриманих
експериментальних результатів, проводити порівняльний аналіз та
робити правильні висновки за підсумками проведеної роботи.
Методична підготовка студентів оцінюється викладачем і
враховується на заліку та екзамені.
Обробка результатів та оформлення звітів
Всі лабораторні заняття повинні закінчуватись правильно
оформленими звітами та їх захистом до виконання чергової роботи.
При наявності не захищених лабораторних робіт студент (очної
форми навчання) не допускається до написання модульної
контрольної роботи.
До якості оформлення звітів (планів конспектів, рефератів, тощо)
надаються наступні вимоги:
– всі звіти необхідно оформляти кульковими ручками
фіолетового, синього або чорного кольору, розбірливим почерком, без
скорочень
(застосовувати
пасту
червоного
кольору
–
ЗАБОРОНЯЄТЬСЯ);
– графічні залежності креслити олівцем чорного кольору на
міліметровому папері встановленого формату А4 (застосовувати
пасту для креслення графіків – ЗАБОРОНЯЄТЬСЯ);
– початок координат обов’язково повинно мати значення 0,
масштаби по осям повинні бути зручними для читання, координатні
вісі повинні мати буквені позначення та розмірність;
– усі експериментальні точки, незалежно від їх розташування,
повинні бути чітко обведені, а узагальнена крива проводиться за
відомими правилами апроксимації і повинна відповідати закону
зміни досліджуваної фізичної величини;
– звіт повинен закінчуватись висновками та підписом студента.
Зауваження викладача, який перевірив звіт, усувається студентом
негайно, після чого звіт надається для повторного захисту. При цьому
невірні розрахунки, графіки не усуваються. Журнал лабораторних
занять (або окремо оформлені звіти) з перевіреними та захищеними
13
14.
звітами надається студентом на екзамені(заліку) і зберігається накафедрі до закінчення студентом курсу навчання в університеті.
Основні правила техніки безпеки при роботі
в аеродинамічній лабораторії
З метою попередження та недопущення нещасних випадків, травм,
виведення з ладу майна та обладнання лабораторії слід виконувати
наступні правила техніки безпеки:
– включати в дію обладнання, прилади, агрегати та інше
обладнання тільки в справному їх стані. Про початок виконання
кожної лабораторної роботи доповісти викладачу або інженеру;
– забороняється знаходитись у площині обертання вентиляторів
дозвукових аеродинамічних труб, а також напроти вхідних та
вихідних пристроїв цих труб;
– не допускати попадання сторонніх предметів в робочі частини
аеродинамічних труб;
– електричні прилади вмикати в мережу відповідної напруги;
– дотримуватись послідовності вмикання та вимикання
працюючого обладнання;
– не перевищувати встановленого тиску в балонах та ресиверах із
стислим повітрям;
– рідина у вимірювальних пристроях отруйна та вогненебезпечна,
тому її ЗАБОРОНЯЄТЬСЯ вживати, розливати та підносити до
відкритого вогню (нагрівальних приладів).
14
15.
АЕРОДИНАМІЧНІ ВИМІРЮВАННЯ,МЕТОДИ ТА ПРИЛАДИ
У розділі розглядаються параметри, які характеризують фізичний
стан рідини та газу, основні закономірності його руху, призначення та
принцип роботи аеродинамічних труб, прилади, які застосовуються в
дослідних лабораторіях для вимірювання тиску, швидкості та інших
параметрів при проведенні аеродинамічних експериментів
Основні теоретичні положення динаміки руху рідини та газу
Стан та фізичні властивості газів характеризуються їх
температурою, тиском, густиною та внутрішньою енергією.
Температура газу (Т) в міжнародній системі одиниць (СІ)
вимірюється за абсолютною шкалою Кельвіна, але в зв'язку з тим, що
більшість приладів проградуйовані за шкалою Цельсія (t°С), в деяких
формулах використовується саме ця шкала.
T 0 К = t + T 0 = t 0 C + 273 0 K ,
де Т 0 = 2730К; t – температура повітря за шкалою Цельсія.
Тиск (р) (нормальна напруга) – це відношення нормальної
поверхневої сили, що діє на елементарну поверхню, до площі цієї
поверхні. Одиницею вимірювання тиску в СІ є паскаль (Па) – тиск,
який створює сила в 1 ньютон, рівномірно розподілена на поверхні з
площею 1 м2 (Па = Н/м2). Для вимірювання тиску використовують
також інші, так звані позасистемні одиниці:
атмосфера – тиск, який створює сила в 1 кілограм-сили,
рівномірно розподілена на поверхні площею 1 квадратний сантиметр
(кгс/см2). Ця одиниця використовується для вимірювання тиску в
техніці. Щоб уникнути плутанини з фізичною атмосферою (дорівнює
нормальному тиску атмосферного повітря на рівні моря) до її
найменування додають слово технічна;
бар – одиниця тиску, що дорівнює 105 Н/м2 ;
міліметр ртутного стовпчика – гідростатичний тиск стовпчика
ртуті висотою в 1 мм ;
міліметр водяного стовпчика – гідростатичний тиск стовпчика
води висотою в 1 мм.
Співвідношення між вказаними одиницями тиску:
15
16.
1 атм=
9.8 ∙104 н/м2 ;
1 бар
=
105 Па ;
1 мм рт ст. =
133.3 Па ;
1 мм вод ст. =
9.8 Па .
Щільність(густина) (ρ) – це маса речовини, яка міститься
одиниці об'єму V:
m
ρ= .
V
В системі СІ густина має розмірність [ρ] = кг/м3 .
Питома вага (γ) – це вага речовини, що міститься в одиниці
об'єму:
mg
.
γ=
V
В системі СІ питома вага має розмірність [γ] = Н/м3.
При нормальних атмосферних умовах (на рівні моря) в різних
системах одиниць параметри атмосферного повітря мають наступні
значення: тиск р =760 мм. рт. ст. = 1,013 105 Па = 10333 мм. вод. ст.;
температура Т=288 К (15о С);
густина ρ = 1,2257 кг/м3 = 0,125 кгс. с2/м4.
В практиці нерідко треба порівнювати результати випробувань
повітряних суден (ПС) та силових установок, проведених в різних
метеорологічних умовах. Для порівняння результатів таких
випробувань та встановлення даних про зміну параметрів повітря в
атмосфері, а також для аеродинамічних розрахунків прийнято
використовувати деякі умовні характеристики атмосфери у вигляді
стандартної атмосфери СА (таблиця параметрів стандартної
атмосфери в залежності від висоти надана у додатку 1).
Внутрішня енергія ( U ) характеризує енергію теплового руху
молекул одиниці маси газу. В системі одиниць СІ внутрішня енергія
вимірюється в джоулях на кілограм (Дж/кг).
Термодинамічні параметри газів пов'язані між собою рівнянням
стану. Для тисків, що не перевищують 1000 атм, параметри газів з
великою точністю задовольняють рівняння Клайперона:
p = ρRT .
(1)*
16
17.
Для повітря в СІ газова постійна R=287.14 м2/c2·K, абоR=287.14 Дж/кг· K.
Рівняння стану, яке пов'язує внутрішню енергію з температурою
газу, має вигляд:
1 p
,
(2)
U = cV ⋅ T =
k −1 ρ
де с V – питома теплоємність газу при постійному об'ємі.
Окрім внутрішньої енергії в аеродинаміці користуються поняттям
ентальпії (тепломісткість) (i), яка визначається співвідношенням
k p
,
(3)
i = cp ⋅T =
k −1 ρ
де с p – питома теплоємність газу при постійному тиску;
k = с p /с V – показник адіабати, який для повітря при дозвукових та
відносно невеликих надзвукових швидкостях течії приймають 1,4.
В багатьох задачах аеродинаміки відносна швидкість руху газу
велика, а теплообмін між окремими його струмками нехтовно малий.
У цьому випадку з рівняння збереження енергії та рівняння (1.1)
випливає співвідношення:
p/ρk = const,
(4)
яке розглядають як рівняння стану для ізоентропічної течії газу, тобто
такої течії, для якої ентропія під час процесу зміни стану газу не
змінюється, а процес є "оборотним".
Під дією тиску або температури рідини і гази при постійній масі
здатні змінювати свій об'єм і відповідно густину. Така властивість
називається стисливістю. Стисливість рідин дуже мала, тому в
більшості випадків нею нехтують і розглядають рідини як нестисливі
з рівнянням стану
ρ = const.
)* - нумерація формул та рисунків здійснюється в межах поточної
лабораторної роботи.
Стисливість газів значно більша. Вирішення питання про те, треба
чи ні при течіях газу враховувати стисливість, залежить від того,
наскільки великі перепади температури та тиску можуть виникати в
області, яка розглядається.
Якщо немає зовнішніх джерел тепла та відсутнє об'ємне виділення
тепла за рахунок поглинання променевої енергії або хімічних реакцій,
17
18.
то зміна температури і тиску викликається самим рухом газу і їхможна оцінити, використовуючи інтеграл Бернуллі. при відсутності
масових сил інтеграл Бернуллі має вигляд:
dp
V2
(5)
= const ,
+∫
2
ρ
де V – швидкість руху газу.
Якщо густина газу залежить лише від величини тиску, то такий газ
називається баротропним. Для ізоентропічної течії баротропного газу
інтеграл Бернуллі зводиться до рівняння Бернуллі:
V2
k
p
(6)
+
⋅ = const .
2 k −1 ρ
За допомогою рівнянь (1), (4) з рівняння (6) можна дійти до
висновку, що найбільші температура T o , густина ρ о і тиск p о будуть
мати місце в точці, де V=0.
Ця точка називається точкою
гальмування, а T о ,p о ,ρ о – відповідно температурою, густиною та
тиском гальмування( в деяких джерелах параметри гальмування
позначаються як T*, p*, ρ*) .
Швидкість звуку, тобто швидкість розповсюдження малих збурень
в газі, залежить від параметрів газу:
a = k ⋅ p = kRT .
ρ
Для характеристики умов прояву стисливості газу використовують
відносну величину M=V/a, яка називається числом Маха.
Використання формули (4), (1), і (2) дозволяє встановити зв'язок
між параметрами гальмування газу і відповідними параметрами в
довільній точці потоку:
k −1
T0 = T 1 +
⋅M 2 ;
(7)
2
1
k − 1 2 k −1
ρ 0 = ρ 1 +
M
2
;
(8)
.
(9)
1
k − 1 2 k −1
p 0 = p 1 +
M
2
18
19.
Аналіз рівняння (8) дозволяє зробити висновок, що при(k − 1)M 2 / 2 << 1 зміною густини можна знехтувати. Для кількісної
оцінки зміни густини розкладають вираз в рівнянні (8) в
біномінальний ряд:
M 2 2−k
ρ 0 = ρ ⋅ 1 +
+
⋅ M 4 ⋅ ⋅ ⋅ .
(10)
2
2
Якщо у виразі (10) взяти лише один додаток, то отримаємо
рівняння Бернуллі для нестислого газу:
V2
p+ρ
= p0 ,
2
яке можна безпосередньо отримати з (1.5) при ρ = const.
Таким чином, рух газу з швидкостями, значно меншими за
швидкість звуку, можна розглядати як рух нестислої рідини, а при
швидкостях, порівнюваними зі швидкістю звуку та більшими за неї,
необхідно враховувати стисливість.
Рівняння неперервності для потоку стислого газу в каналі змінного
вздовж його довжини перетину має вигляд
ρ V сер σ = const ,
(11)
де V сер – середня швидкість газу, що проходить через перетин каналу
площею σ.
Рівняння (11) показує, що масові витрати газу вздовж потоку
незмінні. Для нестислої рідини рівняння неперервності має вигляд:
V сер σ = const .
(12)
Аеродинамічні труби
Більшість досліджень обтікання твердих тіл та їх силової взаємодії
з повітряним потоком проводять на лабораторних установках, що
називаються аеродинамічними трубами (АДТ).
Використання АДТ базується на принципі обернення руху, згідно
якого картина взаємодії тіла і потоку, що його обтікає, не зміниться
від того чи потік набігає на нерухоме тіло, чи тіло рухається в
нерухомому середовищі.
19
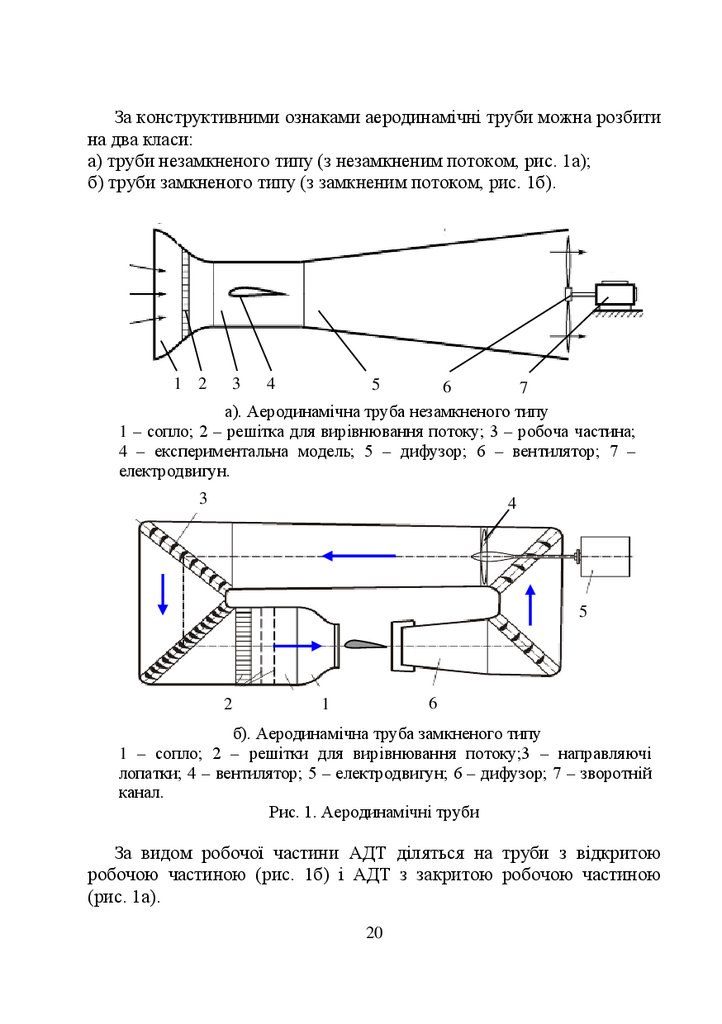
20.
За конструктивними ознаками аеродинамічні труби можна розбитина два класи:
а) труби незамкненого типу (з незамкненим потоком, рис. 1а);
б) труби замкненого типу (з замкненим потоком, рис. 1б).
1 2
3
4
5
6
7
а). Аеродинамічна труба незамкненого типу
1 – сопло; 2 – решітка для вирівнювання потоку; 3 – робоча частина;
4 – експериментальна модель; 5 – дифузор; 6 – вентилятор; 7 –
електродвигун.
3
4
5
2
7
6
1
б). Аеродинамічна труба замкненого типу
1 – сопло; 2 – решітки для вирівнювання потоку;3 – направляючі
лопатки; 4 – вентилятор; 5 – електродвигун; 6 – дифузор; 7 – зворотній
канал.
Рис. 1. Аеродинамічні труби
За видом робочої частини АДТ діляться на труби з відкритою
робочою частиною (рис. 1б) і АДТ з закритою робочою частиною
(рис. 1а).
20
21.
АДТ з відкритою робочою частиною зазвичай замкненого типу.АДТ з відкритою робочою частиною мають ряд переваг: зручність
установки моделей, спостереження і проведення експериментів. Вони
також більш економічні. Проте вони займають більшу в порівнянні з
АДТ незамкненого типу площу і в них складно забезпечити малий
рівень турбулентності потоку.
В залежності від швидкості потоку в робочій частині АДТ можуть
бути: дозвукові (0<M<0.8), білязвукові (або трансзвукові)
(0.8<M<1.2); надзвукові (1.2<M<5), гіперзвукові (М>5).
В аеродинамічній лабораторії НАУ встановлені дозвукова АДТ
замкненого типу з відкритою робочою частиною і АДТ незамкненого
типу з закритою робочою частиною.
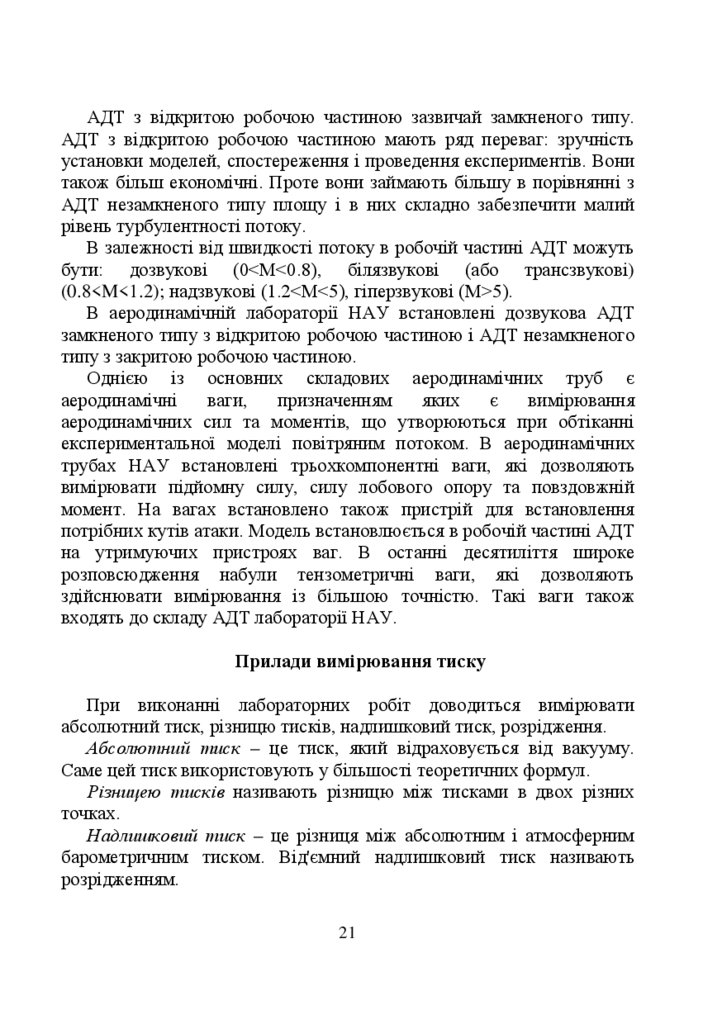
Однією із основних складових аеродинамічних труб є
аеродинамічні
ваги,
призначенням
яких
є
вимірювання
аеродинамічних сил та моментів, що утворюються при обтіканні
експериментальної моделі повітряним потоком. В аеродинамічних
трубах НАУ встановлені трьохкомпонентні ваги, які дозволяють
вимірювати підйомну силу, силу лобового опору та повздовжній
момент. На вагах встановлено також пристрій для встановлення
потрібних кутів атаки. Модель встановлюється в робочій частині АДТ
на утримуючих пристроях ваг. В останні десятиліття широке
розповсюдження набули тензометричні ваги, які дозволяють
здійснювати вимірювання із більшою точністю. Такі ваги також
входять до складу АДТ лабораторії НАУ.
Прилади вимірювання тиску
При виконанні лабораторних робіт доводиться вимірювати
абсолютний тиск, різницю тисків, надлишковий тиск, розрідження.
Абсолютний тиск – це тиск, який відраховується від вакууму.
Саме цей тиск використовують у більшості теоретичних формул.
Різницею тисків називають різницю між тисками в двох різних
точках.
Надлишковий тиск – це різниця між абсолютним і атмосферним
барометричним тиском. Від'ємний надлишковий тиск називають
розрідженням.
21
22.
Для вимірювання абсолютного тиску використовують прилади, щоназиваються барометрами. Говорити про принцип дії барометрів
доцільніше після того, як усвідомлений принцип дії манометрів –
приладів, призначених для вимірювання різниці тисків. За принципом
дії ці прилади діляться на такі типи:
а) рідинні манометри;
б) манометри механічного типу з пружнім чутливим елементом;
в) електричні датчики тиску.
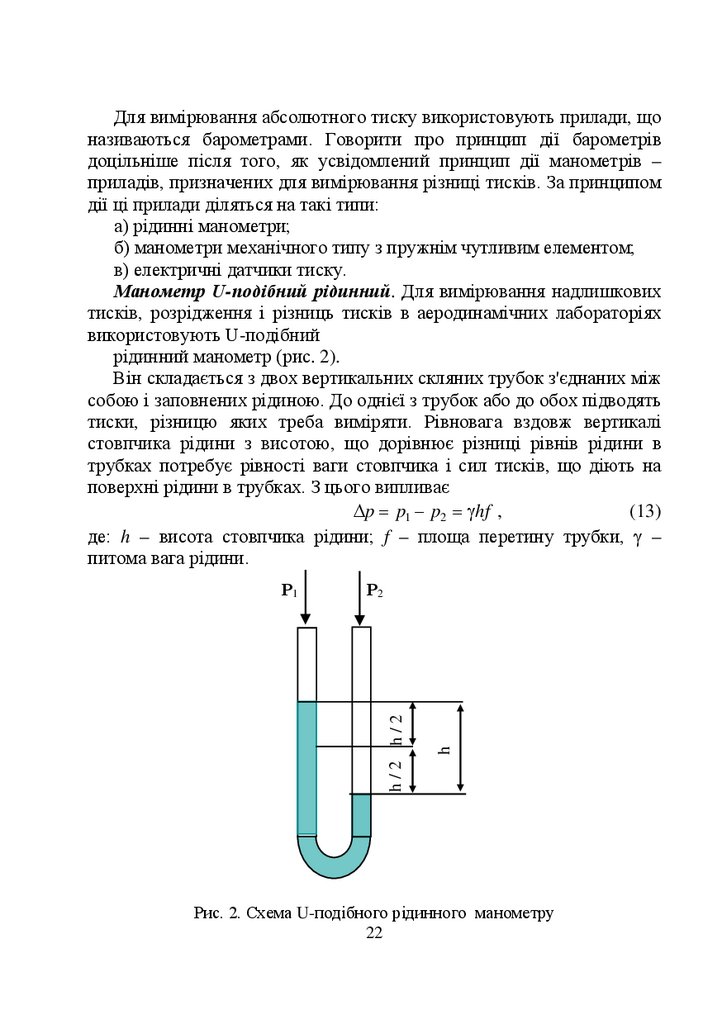
Манометр U-подібний рідинний. Для вимірювання надлишкових
тисків, розрідження і різниць тисків в аеродинамічних лабораторіях
використовують U-подібний
рідинний манометр (рис. 2).
Він складається з двох вертикальних скляних трубок з'єднаних між
собою і заповнених рідиною. До однієї з трубок або до обох підводять
тиски, різницю яких треба виміряти. Рівновага вздовж вертикалі
стовпчика рідини з висотою, що дорівнює різниці рівнів рідини в
трубках потребує рівності ваги стовпчика і сил тисків, що діють на
поверхні рідини в трубках. З цього випливає
(13)
∆p = p1 − p2 = γhf ,
де: h – висота стовпчика рідини; f – площа перетину трубки, γ –
питома вага рідини.
h
Р2
h/2 h/2
Р1
Рис. 2. Схема U-подібного рідинного манометру
22
23.
Різниця тисків зазвичай вимірюється в міліметрах стовпчикарідини, якою заповнена трубка. В лабораторії для вимірювання ∆ρ
використовують спирт або воду.
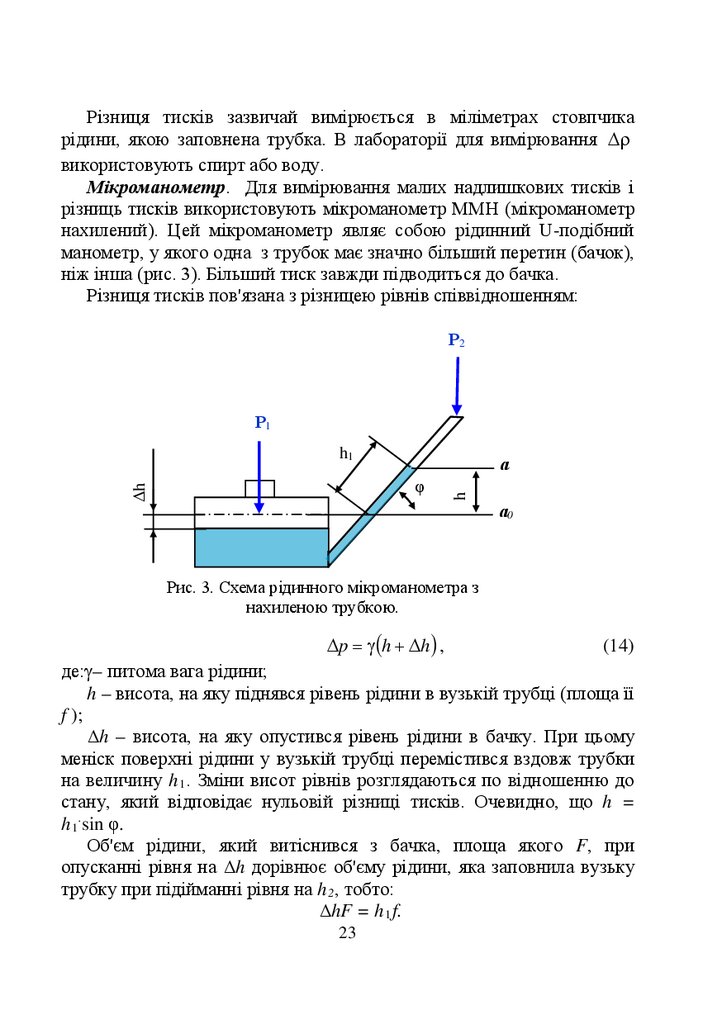
Мікроманометр. Для вимірювання малих надлишкових тисків і
різниць тисків використовують мікроманометр ММН (мікроманометр
нахилений). Цей мікроманометр являє собою рідинний U-подібний
манометр, у якого одна з трубок має значно більший перетин (бачок),
ніж інша (рис. 3). Більший тиск завжди підводиться до бачка.
Різниця тисків пов'язана з різницею рівнів співвідношенням:
Р2
Р1
h1
а
h
Δh
φ
а0
Рис. 3. Схема рідинного мікроманометра з
нахиленою трубкою.
∆p = γ (h + ∆h ) ,
(14)
де:γ– питома вага рідини;
h – висота, на яку піднявся рівень рідини в вузькій трубці (площа її
f );
Δh – висота, на яку опустився рівень рідини в бачку. При цьому
меніск поверхні рідини у вузькій трубці перемістився вздовж трубки
на величину h 1 . Зміни висот рівнів розглядаються по відношенню до
стану, який відповідає нульовій різниці тисків. Очевидно, що h =
h 1 .sin φ.
Об'єм рідини, який витіснився з бачка, площа якого F, при
опусканні рівня на Δh дорівнює об'єму рідини, яка заповнила вузьку
трубку при підійманні рівня на h 2 , тобто:
ΔhF = h 1 f.
23
24.
З останнього рівняння випливає, що Δh = h 1 f / F.Підстановка виразів для h 1 , Δh в вираз (1.14) приводить до:
f
(15)
∆p = γ sin ϕ + h1 .
F
Якщо
ввести
позначення
постійної
мікроманометру
K=γ(sinφ+f/F), h 1 =(a – a 0 ), то вираз для знаходження різниці тисків за
показаннями мікроманометра набуде простого вигляду
(16)
∆p = K (a − a0 ) ,
де: a 0 – показання мікроманометра при нульовій різниці тисків,
a – показання мікроманометра під час вимірювання різниці тисків.
Значення коефіцієнту К залежить від питомої ваги рідини γ, якою
заповнений мікроманометр, співвідношення площ перетинів
вимірювальної трубки і бачка f/F, кута нахилу вимірювальної трубки
до площини горизонту φ.
Для встановлення вимірювальної трубки на потрібний кут до
плити (основи) мікроманометра прикріплена дуга з п'ятьма отворами,
що відповідають певним кутам нахилу вимірювальної трубки. На дузі
проти кожного отвору нанесені значення постійної приладу К.
На табличці, що прикріплена до мікроманометра, вказана питома
вага спирту, якій відповідають значення постійної К, що нанесені на
дузі. На тій же табличці вказана розмірність К(кгс/м3). Якщо питома
вага спирту, яким заповнено мікроманометр буде відрізнятися від
вказаної, то необхідно вказані значення К помножити на множник
k=γ 1 /γ 0 , де γ 0 – питома вага спирту, вказана на табличці, γ 1 – питома
вага спирту реально залитого в мікроманометр.
Оскільки значення постійної К залежать від кута між
вимірювальною трубкою та горизонтальною площиною, то перед
вимірюваннями необхідно встановити плиту мікроманометра строго
горизонтально. Для цього в плиті встановлені регулюючі гвинти, для
регулювання положення плити, і два рідинні рівні, для контролю
горизонтальності. Точність вимірювання збільшується із зменшенням
кута нахилу вузької трубки φ.
Мікроманометр може вимірювати різницю тисків тільки в тому
випадку, якщо більший тиск підводиться до бачка і, відповідно,
менший до вимірювальної трубки.
Більш детальний опис мікроманометра наведений у додатку.
24
25.
Тиск вимірюють або на поверхні твердих тіл, або в потоці рідиничи газу.
Вимірювання тиску на поверхні твердого тіла полягає в тому, що
на поверхні тіла роблять невеликий отвір (діаметром приблизно 0,2
мм) і з'єднують його з манометром.
Вимірювання тиску в потоці виконується за допомогою
манометра, з'єднаного з приймачем тиску, який розташовують в тій
точці потоку, де вимірюють тиск. Далі в тексті індекс “і”
використовують для того щоб підкреслити, що вимірювання пов'язані
з певною точкою.
При дослідженнях стаціонарних течій розглядають:
– статичний тиск p і (або р) – тиск, який би вимірював прилад
(барометр), рухаючись разом з частками газу з однаковою з ними
швидкістю;
– повний тиск p 0 (або тиск гальмування) – тиск, який виник би, в
точці вимірювання внаслідок ізоентропічного гальмування потоку;
– динамічний тиск q і (або швидкісний напір) – різниця між повним
і статичним тиском. З рівняння Бернуллі для нестисливого потоку
випливає, що динамічний тиск пов'язаний з густиною та швидкістю
потоку співвідношенням q і =0,5 ρ і V і 2 .
Якщо значення тисків та інших параметрів газу відносяться до
незбуреного потоку, то замість індексу “i” пишуть значок
нескінченності “∞”.
Основна вимога до конструкції приймачів тиску полягає в тому,
щоб вони мінімально збурювали потік.
Комбінований насадок або приймач повітряного тиску(ППТ). В
якості приймача статичного тиску в дозвукових потоках
використовують насадок Прандтля. Це пустотіла циліндрична трубка
з зовнішнім діаметром d та з обтічним закритим носком у вигляді
напівсфери. На бічній поверхні насадку на відстані (3…8)d від носка,
де тиск стає рівним тиску незбуреного потоку, висвердлюється 4-8
отворів діаметром 0,1d або робиться щілина. Отвори рівномірно
розташовуються вздовж лінії перетину бічної поверхні насадку і
площини, перпендикулярної до осі насадку.
В якості приймача повного тиску використовують насадок Піто.
Це циліндрична трубка з приймальним отвором, оберненим проти
потоку.
25
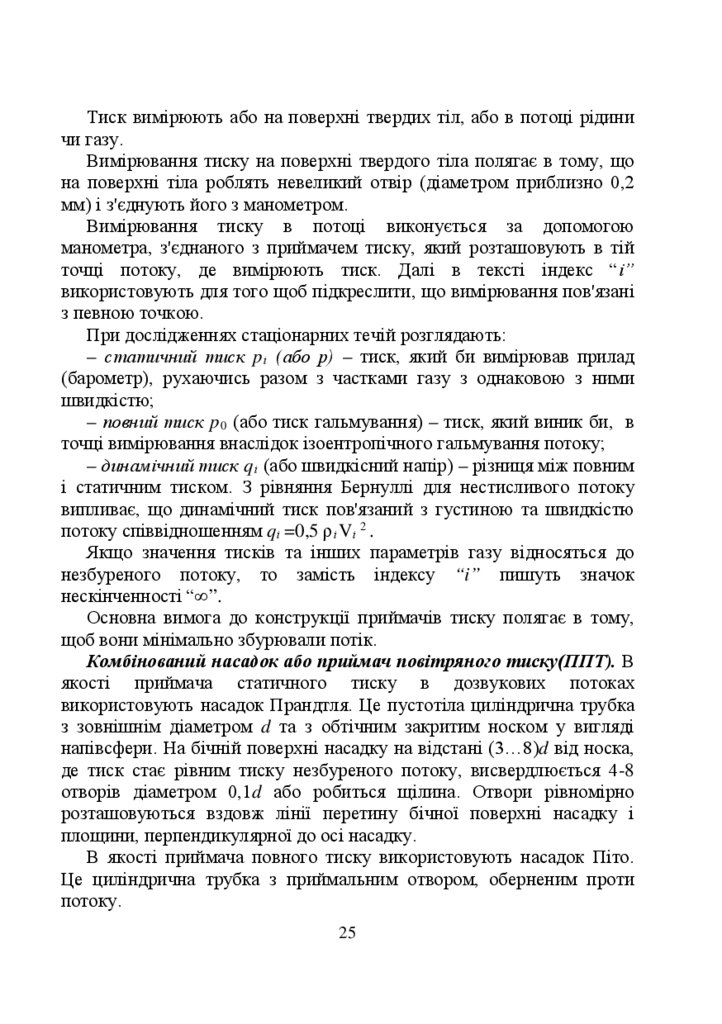
26.
Для отримання значення швидкості потоку зазвичай вимірюютьрізницю повного і статичного тисків. Найбільш поширеним приладом
для вимірювання різниці тисків є комбінований насадок ПітоПрандтля (рис. 4).
Р
Приймач статичного (Р = Р唴)
Р
Приймач повного
Р0
Р
Рис. 4. Схема комбінованого насадка
(приймача повітряного тиску – ППТ).
Насадок складається з двох трубок, які концентрично розташовані
одна в іншій і утворюють камери статичного Р ∞ і повного Р 0 тисків.
Якщо камери повного і статичного тисків з'єднати з
мікроманометром, то він зафіксує різницю між повним та статичним
тисками. Приймаючи до уваги, що у внутрішній трубці V=0, з
рівняння Бернуллі отримаємо вираз для повного тиску у вигляді:
ρ V2
p0 = p∞ + ∞ ∞ (1 + ε ) ,
2
звідки
2( p0 − p∞ )
,
(17)
V∞ =
ρ∞ (1 + ε )
M ∞2 3M ∞4
+
+ ... , поправка для врахування стисливості.
4
40
Для чисел М ∞ , що не перевищують 0,75 наближено приймають
M ∞2
, тоді
ε=
4
де ε =
26
27.
M 2 ρ ⋅ a2M2
p0 − p∞ = q∞ ⋅ 1 + ∞ = ∞ ∞ ⋅ M ∞2 ⋅ 1 + ∞ ,
4
2
4
звідки M ∞ = 2 ⋅
a∞2 = k ⋅ RT∞
2( p0 − p∞ )
−
1
,
+
1
ρ∞ a∞2
V∞ = M ∞ ⋅ a∞
Останні формули дозволяють вирахувати величини M ∞ , a∞ ,V∞ ,
виходячи з значень величин ρ0 , p∞ , T∞ , які безпосередньо
вимірюються.
Для нестисливого потоку ε = 0 і вираз (17) матиме вигляд
2( p0 − p∞ )
.
(18)
V∞ =
ρ∞
Враховуючи вирази (16), (18) і вводячи коефіцієнт похибки
насадка ξ (залежить від форми носка трубки, положення та форми
отворів статичного тиску), отримаємо кінцеву робочу формулу для
визначення швидкості потоку за допомогою насадка і
мікроманометра.
2(a0 − a∞ ) ⋅ C
,
(19)
V∞ =
ρ∞
де: ρ∞ – густина повітря;
(a–a 0 ) – різниця показань на скляній трубці мікроманометра;
C=K·ζ – узагальнений коефіцієнт мікроманометра і комбінованого
насадка.
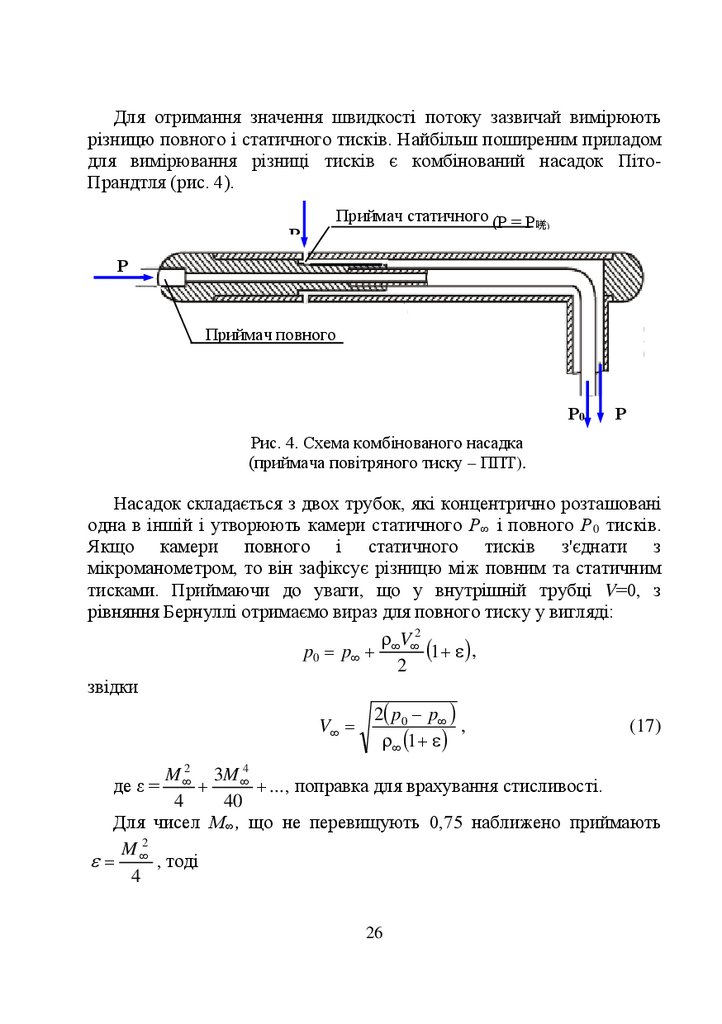
Батарейний манометр. Являє собою прилад, до якого входять
бачок великого об'єму та декілька вертикально розташованих скляних
трубок однакового діаметру (рис 5). Батарейний манометр
призначений для виміру різниці тисків одночасно у великій кількості
точок у порівнянні з деяким тиском, який рахується як контрольний.
Нижні кінці усіх трубок з’єднуються з бачком. Верхні, за винятком
крайніх, які є контрольними, з’єднуються з отворами заміру тисків.
Контрольні трубки призначені для визначення рівня робочої рідини у
бачку, який у процесі роботи змінюється за рахунок перетікання
рідини в трубки. В бачок та до контрольних трубок підводиться
контрольний тиск р, відносно якого вимірюються тиски р 1 , р 2 , …. , р і .
Різниця тисків в і-тій точці виміру буде визначатись:
27
28.
р і – р = ρ р ·g·(h i – h 0 ),де: h i – показання і-тої трубки батарейного манометру;
h 0 – показання контрольної трубки.
Робочі трубки (поєднуються з
точками, в яких вимірюється тиск)
р1
р2
рі
р
р
h2
р
hі
h0
0
Бачок з робочою рідиною
Контрольні трубки
Рис. 5. Схема батарейного манометра.
Головними перевагами рідинних приладів є нескладність
пристрою та висока точність вимірів.
До недоліків рідинних приладів відносяться досить малий діапазон
вимірюваних тисків, низька міцність скляних трубок, необхідність
використання ртуті для збільшення діапазону вимірюваних тисків, та
іншими рідинами, пари яких є отруйними.
Аеродинамічна подібність та її критерії
Закон аеродинамічної подібності є основою експериментальної
аеродинаміки. В аеродинамічних експериментах використовують
28
29.
невеликі моделі літаків або їх частин. За результатами досліджень цихмоделей міркують стосовно льотних характеристик літака чи
аеродинамічних характеристиках його частин.
Дослід показує, що результати лабораторних досліджень не завжди
співпадають з даними натурних польотів. Причиною цього є те, що
обтікання моделі повітряним потоком в умовах лабораторного
експерименту і літака в натурних умовах не є подібними. Для того,
щоб по отриманим аеродинамічним характеристикам моделі
міркувати про аеродинамічні характеристики натури, необхідні
знання щодо переходу від моделі до натури. Питання стоїть
наступним чином – як перейти від аеродинамічних характеристик
моделі до аеродинамічних характеристик натури або, яких умов
необхідно дотримуватись в експерименті, щоб забезпечити
аеродинамічну подібність явищ.
Взагалі в механіці розглядають геометричну, кінематичну та
динамічну подібність, головною і самою складною для її забезпечення
є динамічна подібність – це умови, за яких сили, діючі на схожі
елементи, пропорційні і кути відповідних векторів сил дорівнюють
один одному. Це означає, що динамічна подібність передбачає
геометричну і кінематичну подібність.
В рідині та газі діють різні сили; тиску, тертя, тяжіння, інерції,
пружності та ін. Відповідно, існує декілька критеріїв подібності,
кожний з яких являє дві різні сили різного походження. При
дотриманні кожного з критеріїв окремо має місце часткова
подібність. Надаємо основні критерії подібності, яких дотримуються
в аеромеханіці:
– число Рейнольдса
Re =
інерції до сил в’язкості;
– число Фруда Fr =
до сил тяжіння;
Vl
ν
– характеризує відношення сил
V2
– характеризує відношення сил інерції
gl
– число Струхаля Sh =
Vt
– характеризує інерційні гідро- та
l
газодинамічні сили, які виникають при нестаціонарному русі газу чи
рідини;
29
30.
– число Ейлера Eu =∆p
– характеризує відношення сил тиску
ρV 2
до сил інерції.
В умовних позначеннях:
l – характерний лінійний розмір,
V – характерна швидкість;
υ – кінематичний коефіцієнт в’язкості;
t – інтервал часу;
Δp – різниця тисків;
ρ – щільність(густина) рідини чи газу;
g = 9.81м/с2 – прискорення вільного падіння.
У випадках руху газу з великими швидкостями до числа критеріїв
подібності входить число Маха, під яким розуміють відношення
швидкості руху тіла до швидкості звуку а: М=V/а .
За умов М<1 течії газу називають дозвуковими, при М>1 –
надзвуковими.
Не всі критерії подібності у кожному конкретному випадку мають
однакову значимість. Для течій, близьких до швидкості звуку чи тих,
що перебільшують її, необхідно враховувати подібність за числом
Маха. За чисел М<0.4 впливом стислості можна нехтувати і головним
критерієм
вважати
число
Re.
У
динамічних
задачах
аеромеханіки(маневрені польоти з великими перевантаженнями) і в
течіях рідини із вільною поверхнею(випробовування морських суден)
головним критерієм вважають число Fr.
Питання для самоконтролю
1 Назвіть параметри повітряного потоку, які використовуються в
аеродинаміці.
2. Який зв'язок між параметрами температури при вимірюванні її у
С0 та К0?
3. Що таке тиск і в яких одиницях він вимірюється?
4. Що таке стандартна атмосфера і з якою метою вона
використовується?
5. Що таке густина та питома вага речовини, в яких одиницях вони
вимірюються?
30
31.
6. Запишіть рівняння Бернуллі для стислого та нестиглого потоківгазу.
7. Запишіть рівняння неперервності нестислого потоку газу.
8. Напишіть формулу для визначення швидкості звуку а через
параметри повітряного потоку.
9. Що таке число Маха ?
10. Назвіть характерні діапазони чисел Маха.
11. З якою метою використовуються аеродинамічні труби, який
принцип закладено в основу їх роботи?
12. Назвіть типи аеродинамічних труб, основні частини та їх
призначення.
13. Назвіть прилади, які використовуються для заміру тиску в
газах.
14. Розкажіть принцип роботи мікроманометру.
15. Що таке постійна мікроманометру, від чого залежить її
величина?
16. Розкажіть принцип роботи батарейного манометру та
особливості його застосування.
17. В чому полягає основний недолік лабораторного трубного
експерименту в аеродинаміці?
18. Назвіть основні види подібності в механіці.
19. З якою метою застосовують критерії подібності в
аеродинаміці?
20. Що характеризує критерій Рейнольдса?
21 Який критерій подібності застосовується при досліджені
нестаціонарного руху літака?
22. Який фізичний зміст критерію Фруда?
23. Коли застосовується подібність по Маху?
31
32.
ЛАБОРАТОРНА РОБОТА 1.ДЕМОНСТРАЦІЯ ОСНОВНИХ ЗАКОНІВ РУХУ ГАЗІВ
ТА ЇХ ПРАКТИЧНЕ ЗАСТОСУВАННЯ
Мета роботи – закріпити знання основних законів руху газів при
малих швидкостях та вміння застосовувати їх для вирішення
практичних задач;
– дати чітку уяву картини обтікання тіл дозвуковим потоком і
фізики виникнення при цьому аеродинамічних сил;
– засвоїти методи заміру швидкості руху газу різними способами
та визначення швидкості польоту літака;
– надбати елементарні навички проведення експерименту в
аеродинамічній трубі.
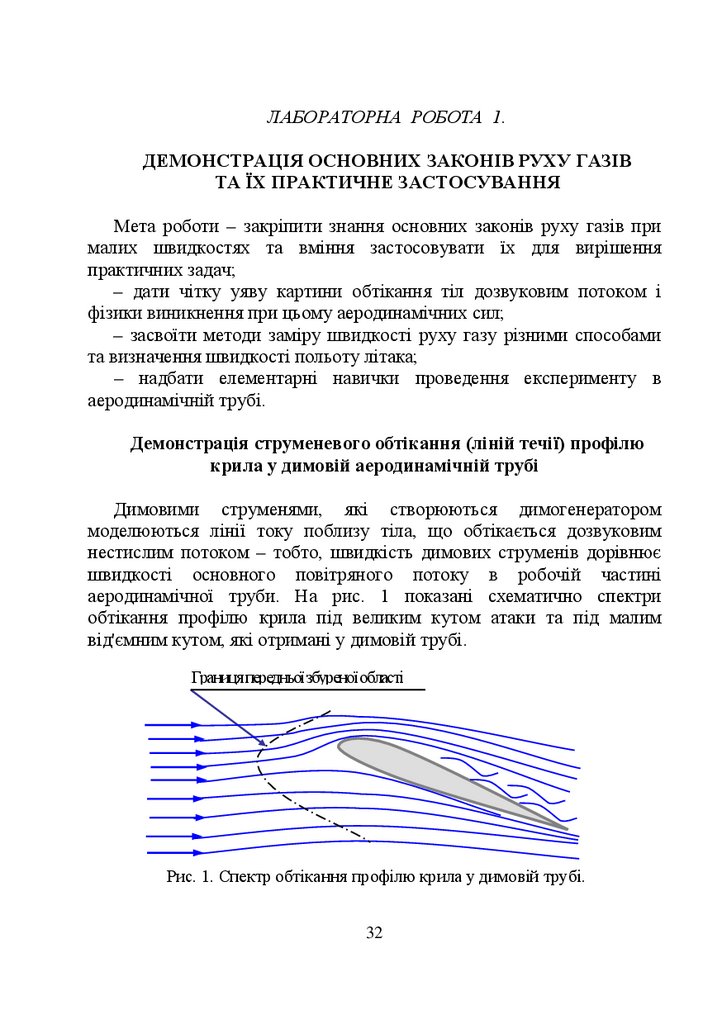
Демонстрація струменевого обтікання (ліній течії) профілю
крила у димовій аеродинамічній трубі
Димовими струменями, які створюються димогенератором
моделюються лінії току поблизу тіла, що обтікається дозвуковим
нестислим потоком – тобто, швидкість димових струменів дорівнює
швидкості основного повітряного потоку в робочій частині
аеродинамічної труби. На рис. 1 показані схематично спектри
обтікання профілю крила під великим кутом атаки та під малим
від'ємним кутом, які отримані у димовій трубі.
Границя передньої збуреної області
Рис. 1. Спектр обтікання профілю крила у димовій трубі.
32
33.
Попереду тіла добре помітна збурена область. Це область, у межахякої тіло здійснює вплив на набігаючий потік(лінії току починають
деформуватись). Біля носка профілю лінії току сильно деформуються,
наближуючись одна до одної, що призводить до деформації
струменів, суттєвому зменшенню площі їх перерізів, збільшенню
швидкості та зменшенню статичного тиску(у відповідності із
рівнянням нерозривності та Бернуллі). На тильній поверхні профілю
має місце надмірне розширення потоку, яке призводить до відриву та
створенню вихорів. В якості об’єктів спостереження можуть
використовуватись тіла різної форми.
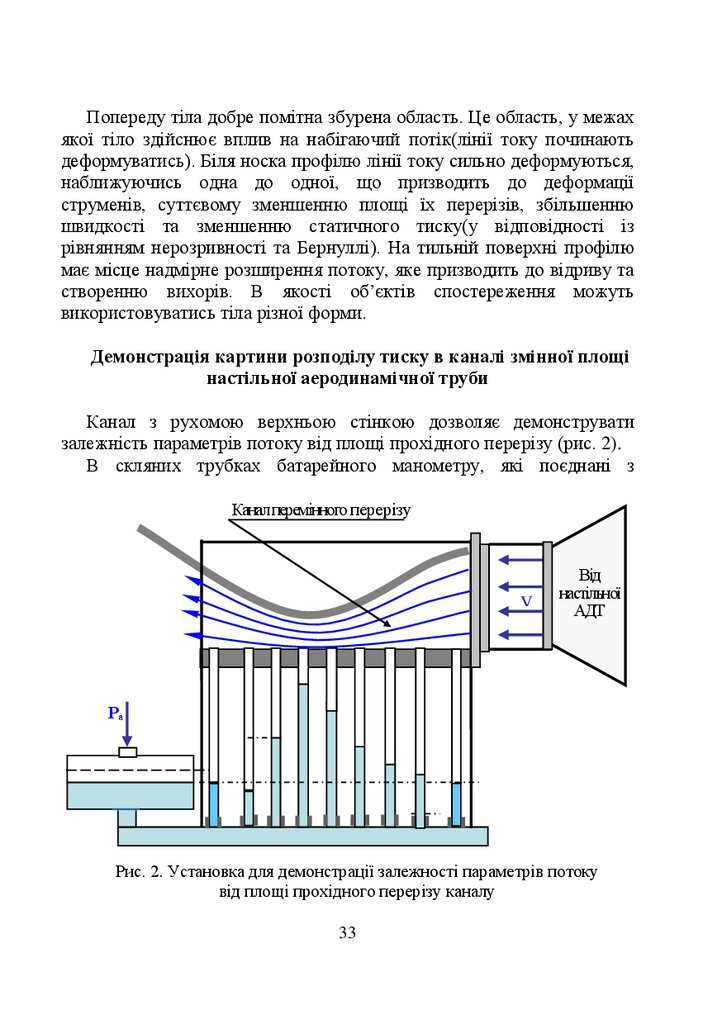
Демонстрація картини розподілу тиску в каналі змінної площі
настільної аеродинамічної труби
Канал з рухомою верхньою стінкою дозволяє демонструвати
залежність параметрів потоку від площі прохідного перерізу (рис. 2).
В скляних трубках батарейного манометру, які поєднані з
Канал перемінного перерізу
V
Від
настільної
АДТ
Ра
Рис. 2. Установка для демонстрації залежності параметрів потоку
від площі прохідного перерізу каналу
33
34.
отворами на нижній нерухомій стіні каналу, при наявності швидкостіпотоку виникає розрідження, і рідина в них займає рівень, що
відповідає різниці атмосферного та статичного тисків в кожній точці.
Тут також маємо прояв дії рівняння нерозривності та рівняння
Бернуллі.
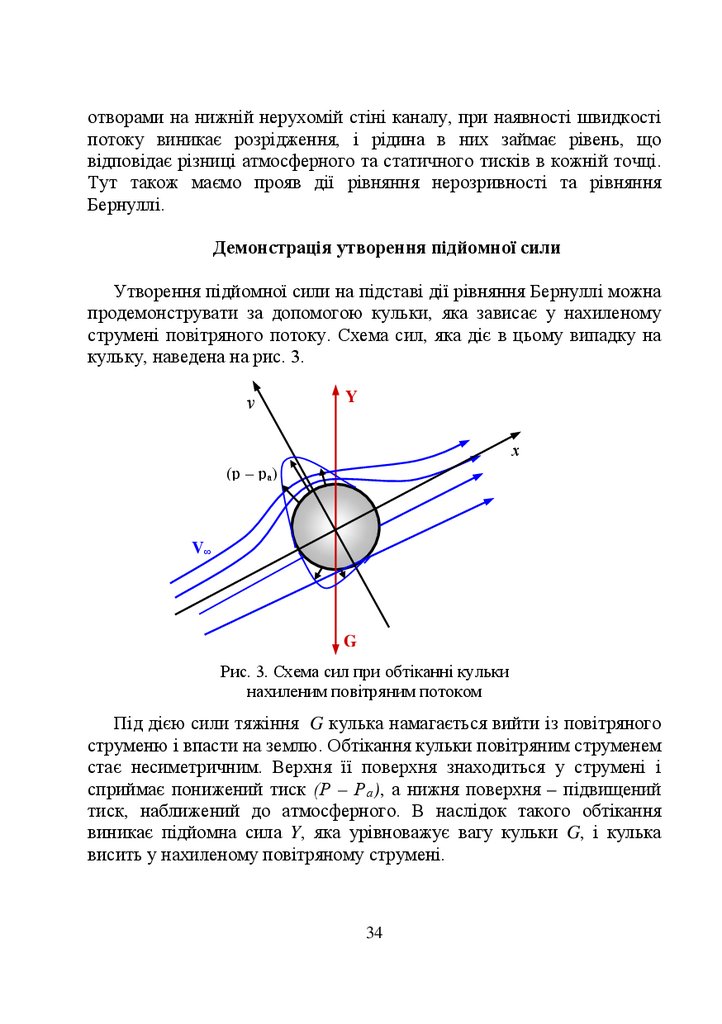
Демонстрація утворення підйомної сили
Утворення підйомної сили на підставі дії рівняння Бернуллі можна
продемонструвати за допомогою кульки, яка зависає у нахиленому
струмені повітряного потоку. Схема сил, яка діє в цьому випадку на
кульку, наведена на рис. 3.
у
Y
х
(р – ра)
V∞
G
Рис. 3. Схема сил при обтіканні кульки
нахиленим повітряним потоком
Під дією сили тяжіння G кулька намагається вийти із повітряного
струменю і впасти на землю. Обтікання кульки повітряним струменем
стає несиметричним. Верхня її поверхня знаходиться у струмені і
сприймає понижений тиск (Р – Р а ), а нижня поверхня – підвищений
тиск, наближений до атмосферного. В наслідок такого обтікання
виникає підйомна сила Y, яка урівноважує вагу кульки G, і кулька
висить у нахиленому повітряному струмені.
34
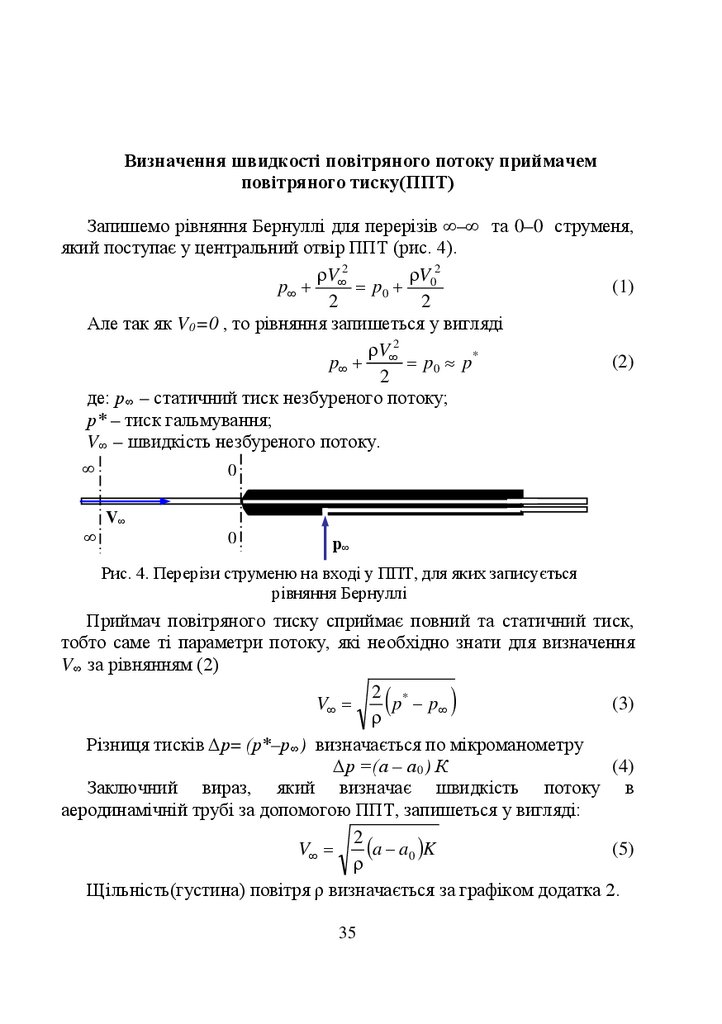
35.
Визначення швидкості повітряного потоку приймачемповітряного тиску(ППТ)
Запишемо рівняння Бернуллі для перерізів ∞–∞ та 0–0 струменя,
який поступає у центральний отвір ППТ (рис. 4).
ρV 2
ρV 2
(1)
p∞ + ∞ = p0 + 0
2
2
Але так як V 0 =0 , то рівняння запишеться у вигляді
ρV 2
(2)
p∞ + ∞ = p0 ≈ p*
2
де: р ∞ – статичний тиск незбуреного потоку;
р* – тиск гальмування;
V ∞ – швидкість незбуреного потоку.
∞
∞
0
V∞
0
р∞
Рис. 4. Перерізи струменю на вході у ППТ, для яких записується
рівняння Бернуллі
Приймач повітряного тиску сприймає повний та статичний тиск,
тобто саме ті параметри потоку, які необхідно знати для визначення
V ∞ за рівнянням (2)
2 *
(3)
V∞ =
p − p∞
ρ
Різниця тисків ∆р= (р*–р ∞ ) визначається по мікроманометру
∆р =(а – а 0 ) К
(4)
Заключний вираз, який визначає швидкість потоку в
аеродинамічній трубі за допомогою ППТ, запишеться у вигляді:
2
(5)
(a − a0 )K
V∞ =
ρ
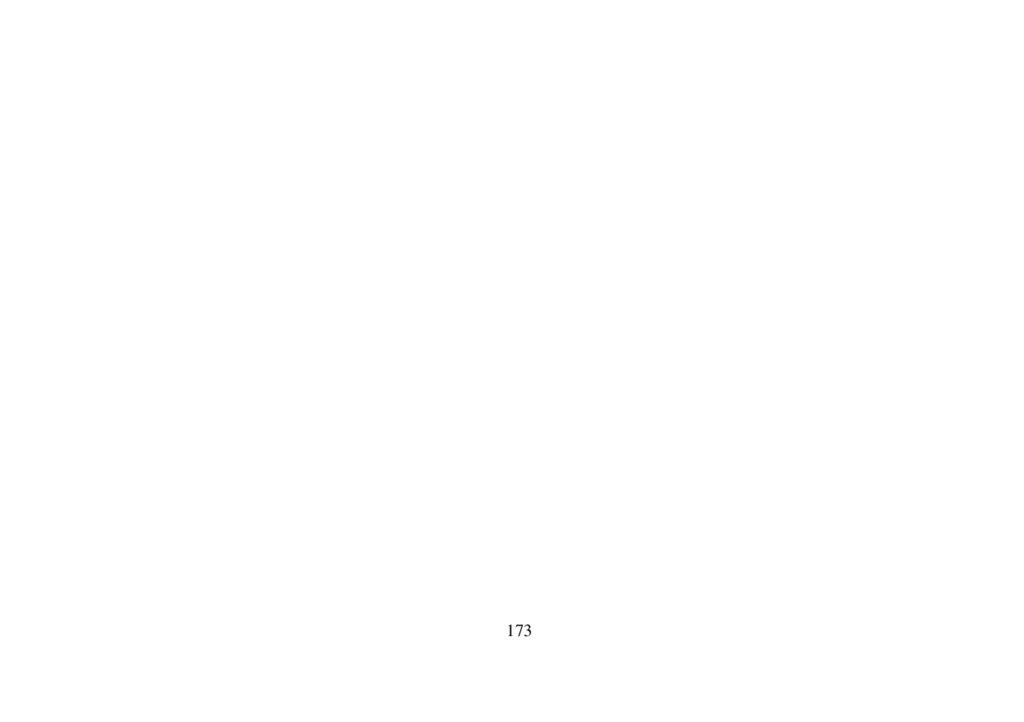
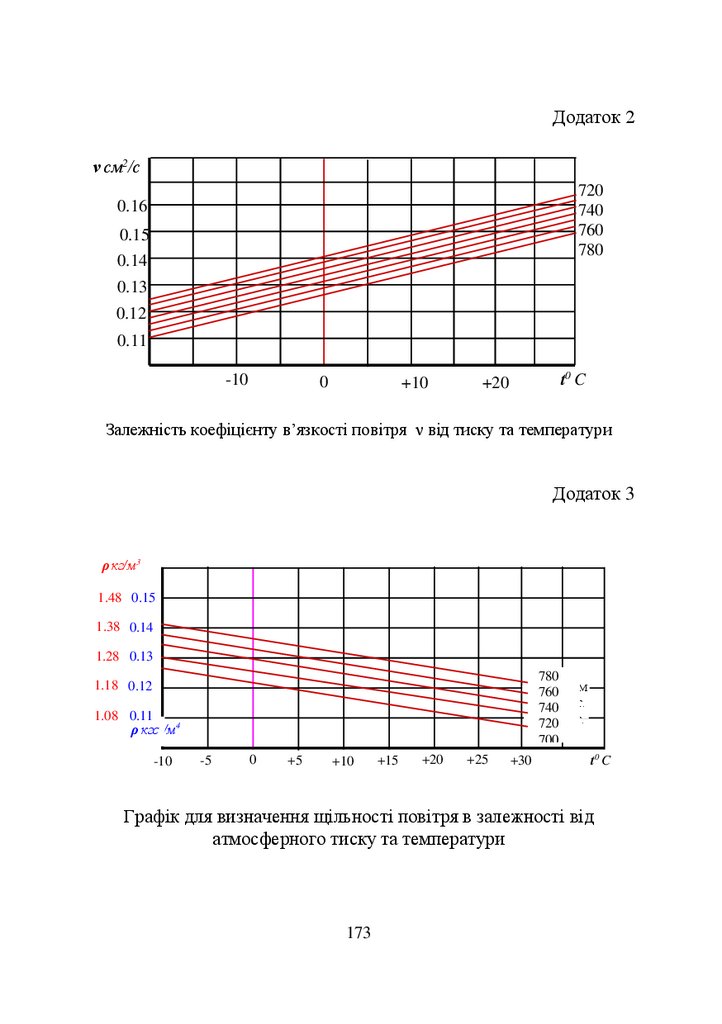
Щільність(густина) повітря ρ визначається за графіком додатка 2.
(
35
)
36.
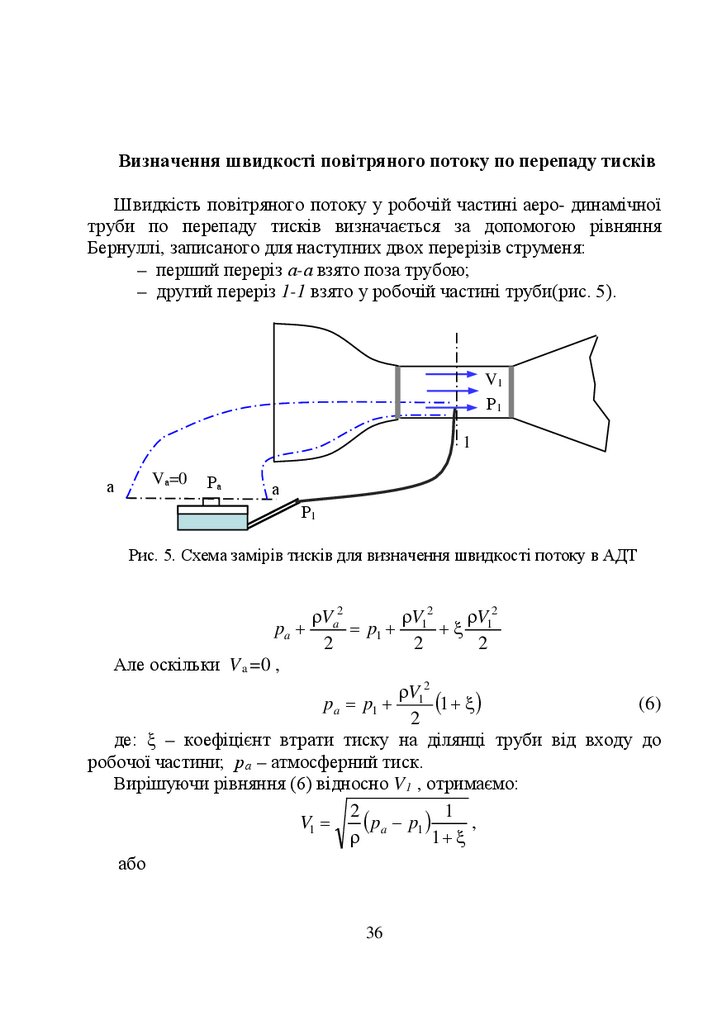
Визначення швидкості повітряного потоку по перепаду тисківШвидкість повітряного потоку у робочій частині аеро- динамічної
труби по перепаду тисків визначається за допомогою рівняння
Бернуллі, записаного для наступних двох перерізів струменя:
– перший переріз а-а взято поза трубою;
– другий переріз 1-1 взято у робочій частині труби(рис. 5).
V1
Р1
1
а
Vа=0
Ра
а
Р1
Рис. 5. Схема замірів тисків для визначення швидкості потоку в АДТ
pa +
Але оскільки V a =0 ,
ρVa2
ρV 2
ρV 2
= p1 + 1 + ξ 1
2
2
2
ρV12
(6)
(1 + ξ)
2
де: ξ – коефіцієнт втрати тиску на ділянці труби від входу до
робочої частини; р а – атмосферний тиск.
Вирішуючи рівняння (6) відносно V 1 , отримаємо:
2
( pa − p1 ) 1 ,
V1 =
ρ
1+ ξ
або
pa = p1 +
36
37.
V1 =2
( pa − p1 )µ
ρ
(7)
1
– коефіцієнт перепаду тисків (μ<1 і для кожної
1+ µ
аеродинамічної труби є відомою величиною).
Остаточно вираз для V 1 через параметри мікроманометру
запишеться у вигляді:
2
(8)
( pa − p1 )Kµ
V1 =
ρ
де: µ1 =
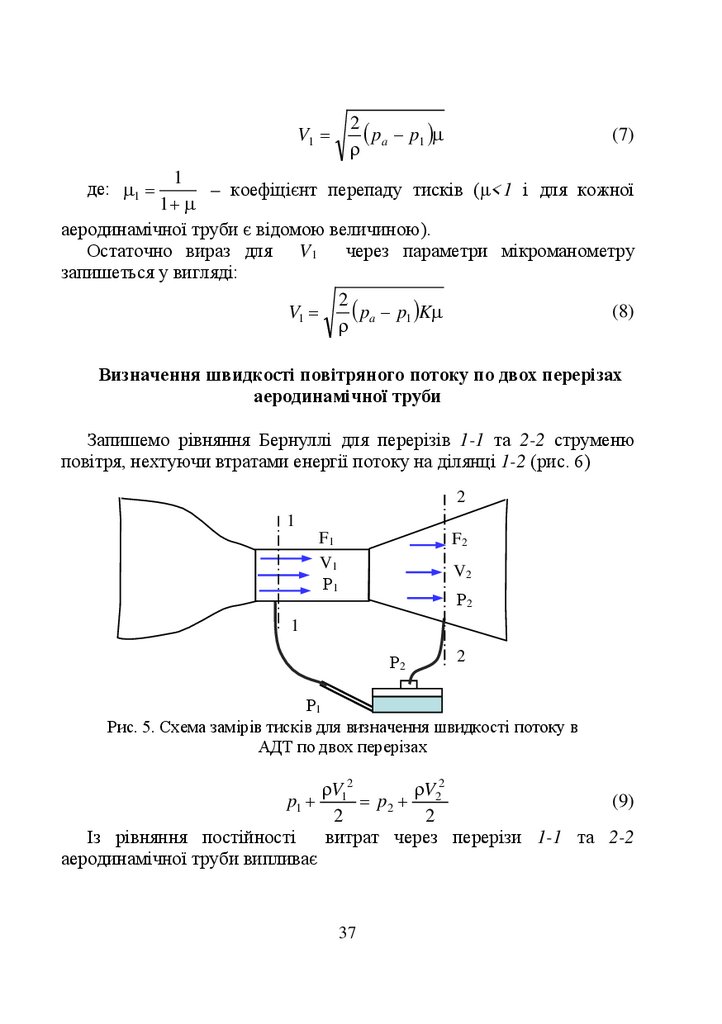
Визначення швидкості повітряного потоку по двох перерізах
аеродинамічної труби
Запишемо рівняння Бернуллі для перерізів 1-1 та 2-2 струменю
повітря, нехтуючи втратами енергії потоку на ділянці 1-2 (рис. 6)
2
1
F1
V1
Р1
F2
V2
Р2
1
Р2
2
Р1
Рис. 5. Схема замірів тисків для визначення швидкості потоку в
АДТ по двох перерізах
p1 +
Із рівняння постійності
аеродинамічної труби випливає
ρV12
ρV 2
(9)
= p2 + 2
2
2
витрат через перерізи 1-1 та 2-2
37
38.
F1F2
де F 1 та F 2 – площі відповідних перерізів труби(відомі).
Запишемо рівняння (9) з урахуванням рівняння (10):
V2 = V1
ρV 2
ρ F
p1 + 1 = p2 + V1 1
2
2 F2
(10)
2
ρV 2 F
(11)
p2 − p1 = 1 1 − 1 = a − a K
2 F2
Вирішивши рівняння (11) відносно V 1 , отримаємо
2
1
(12)
(a − a0 )K
V1 =
2
ρ
F1
1 −
F2
Швидкість повітряного потоку в робочій частині аеродинамічної
труби, яку визначено трьома способами, необхідно порівняти і
зробити висновки.
2
(
)
Питання для самоконтролю
1. Що називається лінією течії та струменем?
2. Запишіть рівняння нерозривності потоку, в чому полягає його
фізична сутність?
3. Запишіть рівняння Бернуллі, поясніть його фізичну сутність.
4. Як утворюється підйомна сила кулі у нахиленому потоці?
5. Запишіть робочу формулу для визначення швидкості потоку за
допомогою мікроманометра.
6. Як вимірюється швидкість потоку за перепадом тисків в АДТ?
7. Як заміряти швидкість потоку в аеродинамічній трубі по двох
перерізах?
38
39.
ЛАБОРАТОРНА РОБОТА 2.ГРАДУЮВАННЯ ПРИЙМАЧА ПОВІТРЯНОГО ТИСКУ
Мета роботи – визначити поправочний коефіцієнт приймача
повітряного тиску (ППТ), який градуюють, зону нечутливості ППТ
щодо кута між віссю ППТ та напрямком вектора швидкості
повітряного потоку.
Основні теоретичні положення
Градуювання – це визначення поправочного коефіцієнту ξ Г
приладу шляхом порівнянь показань приладу, що градуюється, з
дійсними показаннями точно вивіреного приладу, який беруть за
еталон.
Для усунення систематичних похибок у визначенні повітряних
швидкостей, які викликані неточністю встановлення ППТ, косим
обдуванням, проводиться градуювання ППТ і вираховується
коефіцієнт ξ Г шляхом порівняння показань мікроманометра,
з’єднаного з еталонним ППТ, для якого коефіцієнт ξе відомий. Для
цього ж визначається вплив кута відхилення осі ППТ від напрямку
швидкості повітряного потоку, що набігає, на показання
мікроманометра, з’єднаного з ППТ, що градуюється.
Під час проведення градуювання вважається, що ППТ, який
градуюється, і еталонний ППТ сприймають однаковий повний тиск.
Забезпечення виконання цієї умови складна технічна проблема. Для
вирішення цієї проблеми використовують коефіцієнт поля
динамічних тисків. В різних точках повітряного потоку можуть
існувати різні швидкості, а відповідно і різні динамічні тиски.
Коефіцієнт поля динамічних тисків характеризує ці відмінності. За
коефіцієнт поля динамічного тиску приймають відношення
динамічних тисків, виміряних у двох конкретних точках повітряного
потоку:
µ1.2 =
39
q1
q2
(1)
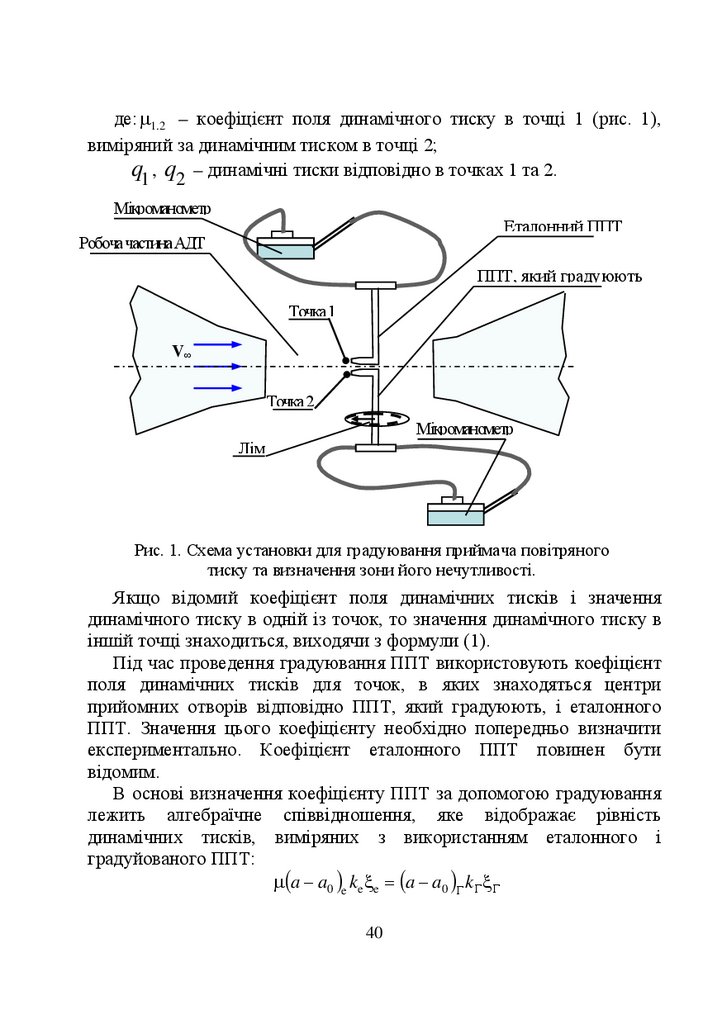
40.
де: µ1.2 – коефіцієнт поля динамічного тиску в точці 1 (рис. 1),виміряний за динамічним тиском в точці 2;
q1 , q2 – динамічні тиски відповідно в точках 1 та 2.
Мікроманометр
Еталонний ППТ
Робоча частина АДТ
ППТ, який градуюють
Точка 1
V∞
Точка 2
Мікроманометр
Лім
Рис. 1. Схема установки для градуювання приймача повітряного
тиску та визначення зони його нечутливості.
Якщо відомий коефіцієнт поля динамічних тисків і значення
динамічного тиску в одній із точок, то значення динамічного тиску в
іншій точці знаходиться, виходячи з формули (1).
Під час проведення градуювання ППТ використовують коефіцієнт
поля динамічних тисків для точок, в яких знаходяться центри
прийомних отворів відповідно ППТ, який градуюють, і еталонного
ППТ. Значення цього коефіцієнту необхідно попередньо визначити
експериментально. Коефіцієнт еталонного ППТ повинен бути
відомим.
В основі визначення коефіцієнту ППТ за допомогою градуювання
лежить алгебраїчне співвідношення, яке відображає рівність
динамічних тисків, виміряних з використанням еталонного і
градуйованого ППТ:
µ(a − a0 )e ke ξ e = (a − a0 )Г k Г ξ Г
40
41.
де: μ – коефіцієнт поля динамічних тисків для точок, в якихзнаходяться
центри
приймальних
отворів
відповідно
до
градуйованого і еталонного ППТ;
(a − a0 )e , (a − a0 )Г – покази мікроманометрів, з’єднаних,
відповідно, з еталонним ППТ і ППТ, що градуюється;
ξe , ξ Г – відповідно коефіцієнти еталонного ППТ і ППТ, що
градуюється.
Значення µ визначається за формулою
q Г (a − a0 )Г
=
qе (a − a0 )*е
*
µ=
(2)
де: q Г – динамічний тиск у точці, де знаходиться центр
приймального отвору ППТ, що градуюється;
qe – динамічний тиск у точці, де знаходиться центр приймального
отвору еталонного ППТ;
(a − a0 )e ∗ , (a − a0 )Г ∗ – покази мікроманометра, з’єднаного з
еталонним ППТ, під час попередніх вимірювань динамічних тисків у
точках, в яких під час градуювання будуть знаходитись центри
прийомних отворів відповідно еталонного ППТ і ППТ, який
градуюють.
Для визначення коефіцієнта ППТ, який градуюють, необхідно
виконати ряд одночасних вимірювань динамічних
тисків за допомогою еталонного ППТ і ППТ, який градуюють. За
результатами вимірювань в системі координат: вісь абсцис – значення
(a − a0 )Г kГ , вісь ординат – значення µ(a − a0 )e keξe зображають точки,
що відповідають окремим вимірюванням. Приблизний вигляд
вказаних побудов наведено на рис. 2.
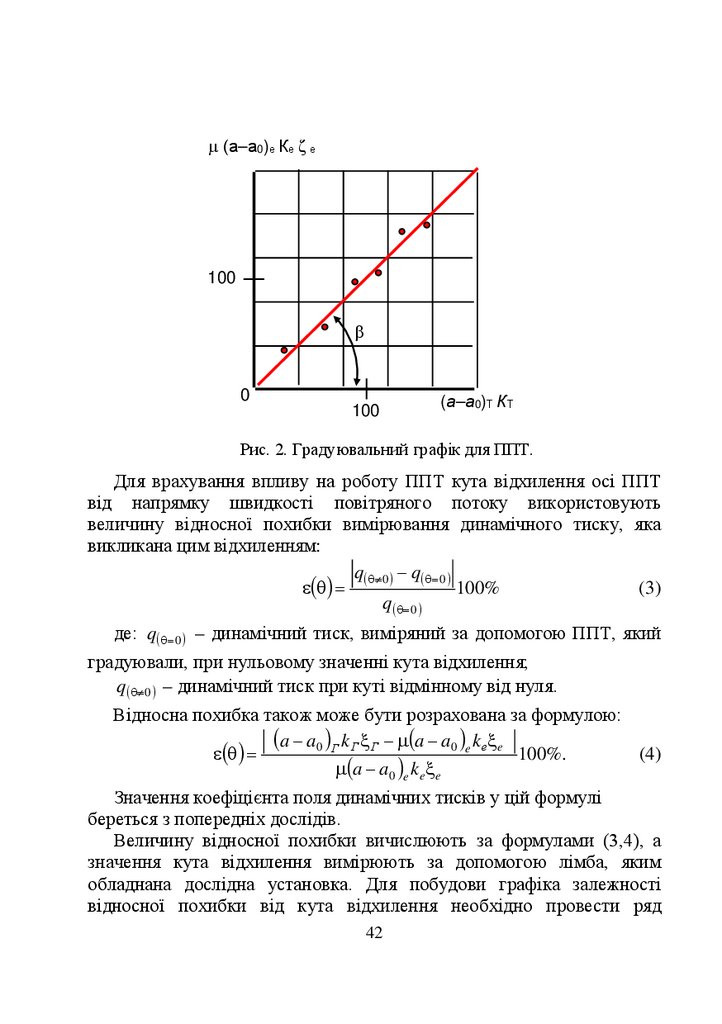
Якщо по точках, зображеним на рис. 2, провести пряму, що їх
усереднює і проходить через початок координат, то коефіцієнту
ξ Г відповідатиме значення кутового коефіцієнта вказаної прямої.
Згідно з рис. 2 кутовий коефіцієнт дорівнює tgβ, де β – кут між віссю
абсцис та прямою, за умови, що масштаби обох осей однакові.
41
42.
μ (а–а0)е Ке ζ е100
β
0
100
(а–а0)Т КТ
Рис. 2. Градуювальний графік для ППТ.
Для врахування впливу на роботу ППТ кута відхилення осі ППТ
від напрямку швидкості повітряного потоку використовують
величину відносної похибки вимірювання динамічного тиску, яка
викликана цим відхиленням:
q(θ ≠ 0 ) − q(θ = 0 )
(3)
ε(θ) =
100%
q(θ = 0 )
де: q(θ = 0 ) – динамічний тиск, виміряний за допомогою ППТ, який
градуювали, при нульовому значенні кута відхилення;
q(θ≠ 0 ) – динамічний тиск при куті відмінному від нуля.
Відносна похибка також може бути розрахована за формулою:
(a − a0 )Г k Г ξ Г − µ(a − a0 )e kеξe
(4)
ε(θ) =
100%.
µ(a − a0 )e ke ξe
Значення коефіцієнта поля динамічних тисків у цій формулі
береться з попередніх дослідів.
Величину відносної похибки вичислюють за формулами (3,4), а
значення кута відхилення вимірюють за допомогою лімба, яким
обладнана дослідна установка. Для побудови графіка залежності
відносної похибки від кута відхилення необхідно провести ряд
42
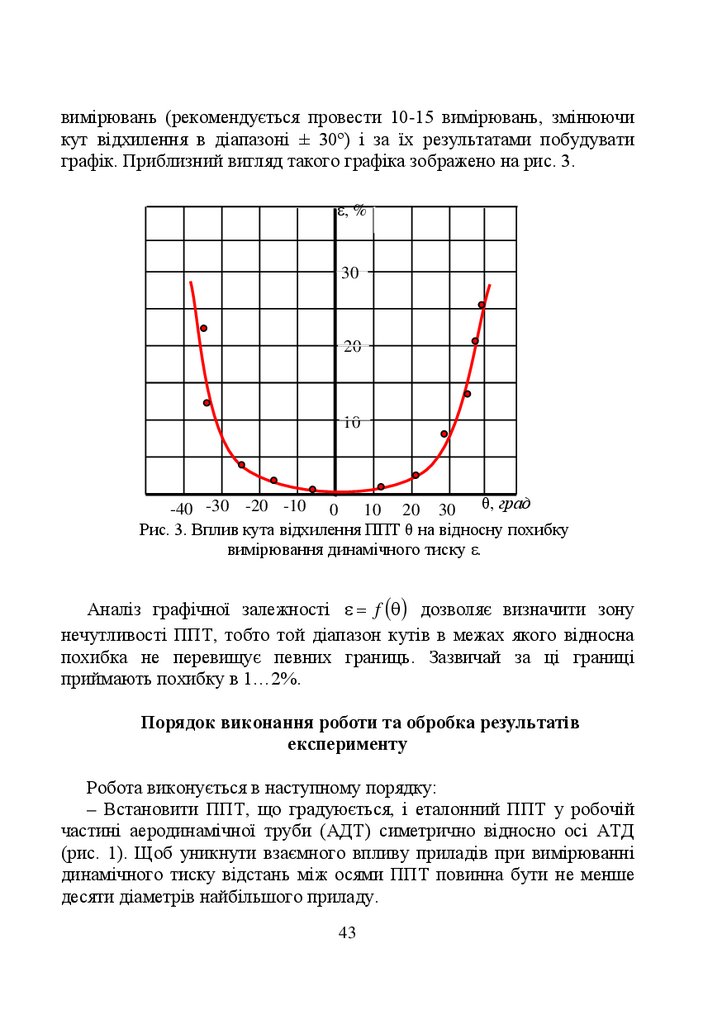
43.
вимірювань (рекомендується провести 10-15 вимірювань, змінюючикут відхилення в діапазоні ± 30º) і за їх результатами побудувати
графік. Приблизний вигляд такого графіка зображено на рис. 3.
ε, %
30
20
10
θ, град
-40 -30 -20 -10 0
10 20 30
Рис. 3. Вплив кута відхилення ППТ θ на відносну похибку
вимірювання динамічного тиску ε.
Аналіз графічної залежності ε = f (θ) дозволяє визначити зону
нечутливості ППТ, тобто той діапазон кутів в межах якого відносна
похибка не перевищує певних границь. Зазвичай за ці границі
приймають похибку в 1…2%.
Порядок виконання роботи та обробка результатів
експерименту
Робота виконується в наступному порядку:
– Встановити ППТ, що градуюється, і еталонний ППТ у робочій
частині аеродинамічної труби (АДТ) симетрично відносно осі АТД
(рис. 1). Щоб уникнути взаємного впливу приладів при вимірюванні
динамічного тиску відстань між осями ППТ повинна бути не менше
десяти діаметрів найбільшого приладу.
43
44.
– Підключити ППТ, що градуюється, і еталонний ППТ до двохмікроманометрів з відомими значеннями коефіцієнтів К.
– Встановити еталонний ППТ так, щоб центр його прийомного
отвору знаходився у точці центра прийомного отвору ППТ, який
градуюють (точка 1). Попередньо ППТ, який градуюють, забрати з
робочої частини АДТ. Запустити АДТ, встановити швидкість потоку,
яка відповідає 70% максимального динамічного тиску. Виміряти за
допомогою мікроманометра величину динамічного тиску, а також
напругу і струм у колі живлення електродвигуна вентилятора АДТ.
Записати значення виміряних величин. Не змінюючи режим роботи
АДТ (напруга і струм повинні бути постійними), помістить еталонний
ППТ у точку симетричну точці попереднього виміру (точку 2).
Виміряти величину динамічного тиску, напруги і струму. Визначити
величину коефіцієнта поля динамічних тисків для вказаних двох
точок:
(a − a0 )1
.
µ1, 2 =
(a − a0 )2
– Зменшити режим роботи АДТ до мінімального і встановити в
робочій частині АДТ ППТ, що градуюється. Встановлювати ППТ
треба так, щоб центр його приймального отвору знаходився у точці 1.
Виконати обома ППТ ряд одночасних вимірювань (не менше п’яти
вимірювань при динамічних тисках:
q1 = qmin , q2 = qmin + 0,25∆q, q3 = qmin + 0,5∆q, q4 = qmin + 0,75∆q,
(q
q5 = qmax , ∆q = (qmax − qmin ).
max відповідає показам мікроманометра, з’єднаного з еталонним ППТ,
при максимальних обертах вентилятора АДТ, qmin = 0,25qmax ). Дані
експерименту і результати їхньої обробки записати у протокол
вимірювань.
– За даними протоколу вимірювань побудувати графік залежності
µ1.2 (a − a0 )Г K Г = f [(a − a0 )e K e ] .
– При постійному режимі роботи вентилятора ( N B = const ) за
допомогою ППТ, що градуюється, вимірюють динамічний тиск у
робочій частині АДТ при різних кутах повороту ППТ до осі робочої
частини. Вважають, що коефіцієнт ξ Г при куті повороту θ = 0
44
45.
відомий. Дані експерименту та результати їхньої обробки записують упротокол вимірювань.
– За даними протоколу вимірювань побудувати графік залежності
відносної похибки вимірювання динамічного тиску ε від кута між
осями ППТ та робочої частини АДТ. Визначити зону нечутливості
ППТ, тобто інтервал кутів, в якому похибка вимірювань не перевищує
±(1…2)%.
Питання для самоконтролю
4. Роботу яких приладів кабіни пілота забезпечує приймач
повітряного тиску ?
5. Що лежить в основі роботи приймача повітряного тиску ?
6. З якою метою виконується градуювання приймача повітряного
тиску ?
7. Що таке коефіцієнт поля динамічних тисків ?
8. Запишіть формулу для визначення коефіцієнту поля динамічних
тисків для точок, в яких знаходяться центри приймальних отворів
градуйованого та еталонного ППТ.
9. В чому полягає експеримент по градуюванню ППТ ?
10. Як будується градуювальник графік ППТ ?
11. В чому полягає експеримент по визначенню зони нечутливості
ППТ до відхилення осі відносно напряму потоку ?
9. Як будується графік по визначенню кута відхилення ППТ на
відносну похибку вимірювання динамічного тиску ?
45
46.
ЛАБОРАТОРНА РОБОТА 3.ВИЗНАЧЕННЯ ПОЛЯ ДИНАМІЧНИХ ТА СТАТИЧНИХ
ТИСКІВ В РОБОЧІЙ ЧАСТИНІ АЕРОДИНАМІЧНОЇ ТРУБИ
Мета роботи – експериментально визначити розподіл швидкісних
напорів та тисків в кількох перерізах робочої частини АДТ;
–
побудувати графік коефіцієнтів поля швидкісних напорів та
тисків.
Основні теоретичні положення
Аеродинамічні труби використовуються для проведення багатьох
аеродинамічних досліджень, тому завжди необхідно, щоб умови
моделювання дотримувались достатньо точно.
В ідеальних аеродинамічних трубах швидкість і тиск всюди в
межах робочої частини повинні бути однаковими. Окрім того,
швидкість повинна бути спрямована паралельно вісі робочої частини.
Ці параметри повітряного потоку не повинні змінюватись під плином
часу.
Власно кажучи, у зв’язку із неточністю монтування труби,
дефектів, які виникають в процесі її експлуатації, швидкості в різних
точках робочої частини, як правило, дещо відрізняються одна від
одної. У цих випадках кажуть, що поле швидкостей нерівномірне.
Швидкість в аеродинамічному експерименті частіше за все
обчислюється по швидкісному напору, який вимірюється за
допомогою приймача статичного тиску. У зв’язку з цим вивчення
поля швидкостей замінюється вивченням поля швидкісних напорів.
Швидкісний напір вимірюється в багатьох закономірно обраних
точках поперечного перерізу робочої частини труби. Середнє
значення швидкісного напору рахується для даного поперечного
перерізу робочої частини. Мірою відхилення швидкісного напору у
деякій точці М від середнього швидкісного напору буде їх
відношення, яке називають коефіцієнтом поля швидкісних напорів
(динамічних тисків) труби μ, тобто:
46
47.
ρV 22
M
µ=
2
ρV
2
сер
Якщо поперечний переріз поділений на ділянки рівної площі, то
середній швидкісний напір визначається як середнє арифметичне
показників швидкісних напорів:
ρV 2
2
M
,
µ=
1 n ρV 2
∑
n i =1 2 i
де n – число точок, в яких вимірюється швидкісний напір.
В процесі експерименту можливі деякі відхилення в режимі
роботи труби, причиною яких може бути, наприклад, коливання
напруги в електромережі.
Щоб запобігти помилки, яка вноситься нестаціонарністю потоку,
одночасно із замірами в різних точках перерізу заміряється
швидкісний напір в деякій точці, яка приймається за контрольну.
Невеликі зміни значень швидкісного напору за рахунок
нестаціонарності роботи труби можна рахувати пропорційними у всіх
точках. При обчисленні коефіцієнту поля порівнюються показники в
окремій точці "i" і середній швидкісний напір, який обчислюється як
середнє арифметичне показників усіх точок перерізу, які
вимірювались у різні моменти часу.
Виключити вплив не стаціонарності можна, поділивши значення
всіх швидкісних напорів на відповідне значення швидкісного напору
в контрольній точці "к". На разі будемо мати наступну залежність :
ρV 2
µ= 2
ρV 2
1 n 2
∑
ρV 2
n i =1
2 k
ρV 2
2 k M
47
.
i
48.
Для отримання кінцевої робочої формули необхідно виразитишвидкісні напори через показники контрольного та робочого
мікроманометрів:
(а − а0 )С роб
(а − а0 ) к Ск М
µ= n
.
(а − а0 )С роб
1
∑
n i =1 (а − а0 ) к Ск і
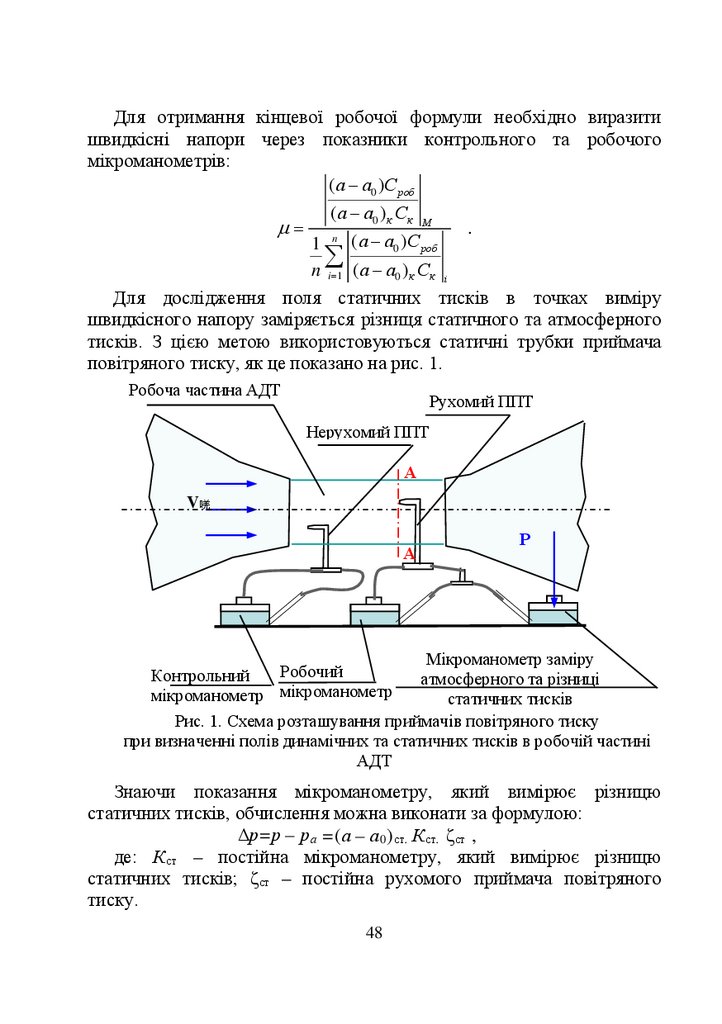
Для дослідження поля статичних тисків в точках виміру
швидкісного напору заміряється різниця статичного та атмосферного
тисків. З цією метою використовуються статичні трубки приймача
повітряного тиску, як це показано на рис. 1.
Робоча частина АДТ
Рухомий ППТ
Нерухомий ППТ
А
V唴
А
Р
Мікроманометр заміру
Робочий
Контрольний
атмосферного та різниці
мікроманометр мікроманометр
статичних тисків
Рис. 1. Схема розташування приймачів повітряного тиску
при визначенні полів динамічних та статичних тисків в робочій частині
АДТ
Знаючи показання мікроманометру, який вимірює різницю
статичних тисків, обчислення можна виконати за формулою:
Δр=р – р а =(а – а 0 ) ст. К ст. ζ ст ,
де: К ст – постійна мікроманометру, який вимірює різницю
статичних тисків; ζ ст – постійна рухомого приймача повітряного
тиску.
48
49.
Порядок виконання роботи та обробка результатівексперименту
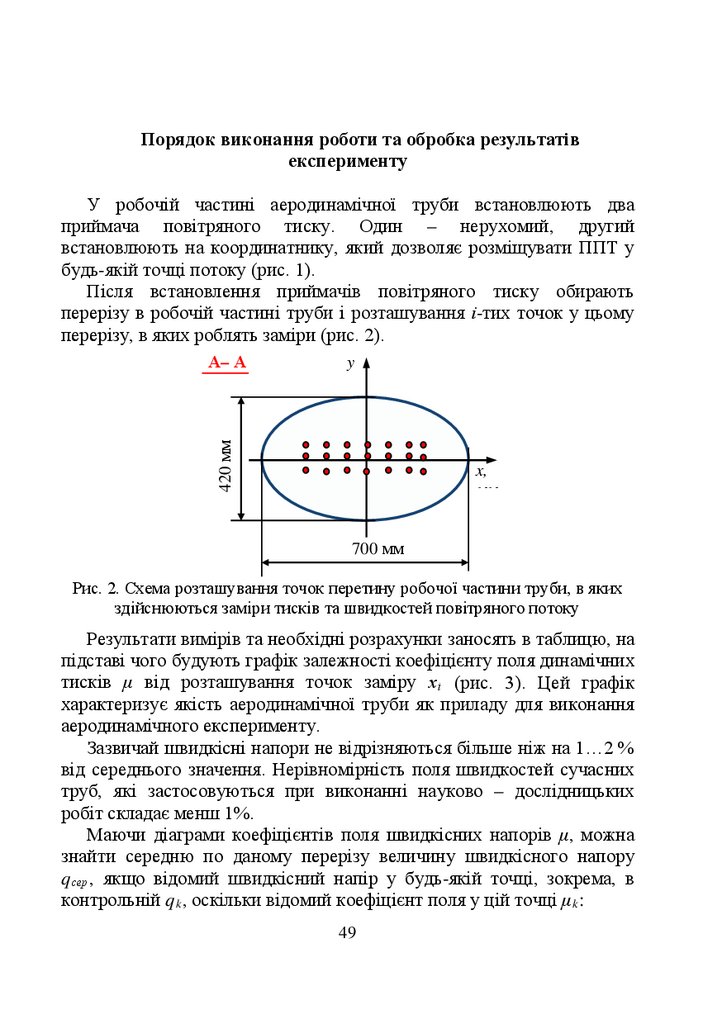
У робочій частині аеродинамічної труби встановлюють два
приймача повітряного тиску. Один – нерухомий, другий
встановлюють на координатнику, який дозволяє розміщувати ППТ у
будь-якій точці потоку (рис. 1).
Після встановлення приймачів повітряного тиску обирають
перерізу в робочій частині труби і розташування і-тих точок у цьому
перерізу, в яких роблять заміри (рис. 2).
y
420 мм
А– А
x,
мм
700 мм
Рис. 2. Схема розташування точок перетину робочої частини труби, в яких
здійснюються заміри тисків та швидкостей повітряного потоку
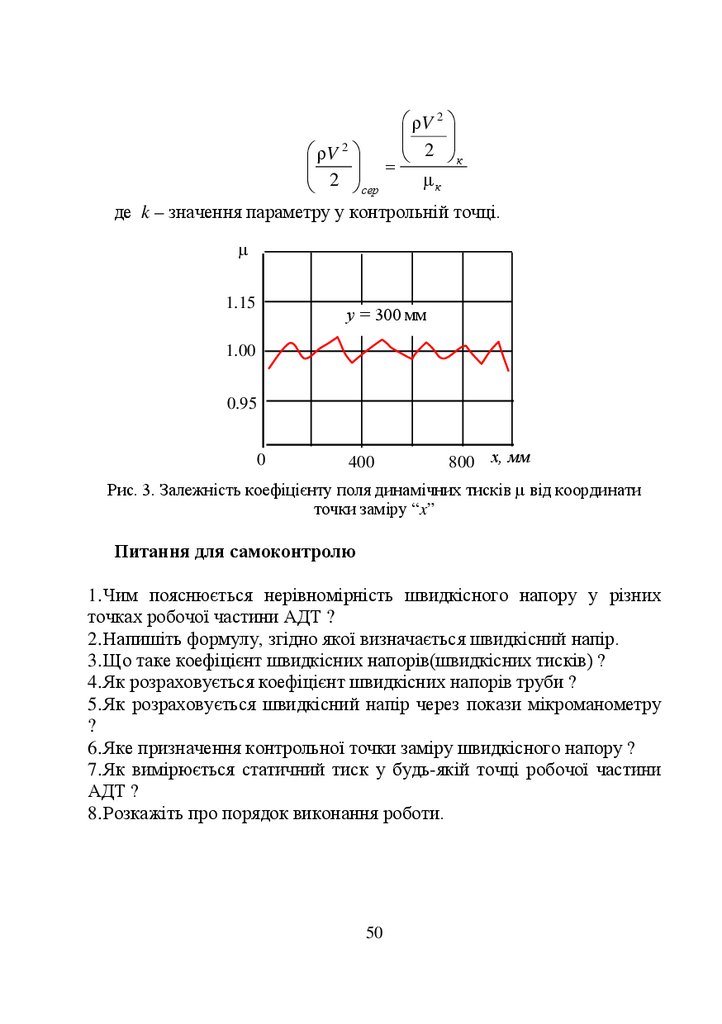
Результати вимірів та необхідні розрахунки заносять в таблицю, на
підставі чого будують графік залежності коефіцієнту поля динамічних
тисків μ від розташування точок заміру х і (рис. 3). Цей графік
характеризує якість аеродинамічної труби як приладу для виконання
аеродинамічного експерименту.
Зазвичай швидкісні напори не відрізняються більше ніж на 1…2 %
від середнього значення. Нерівномірність поля швидкостей сучасних
труб, які застосовуються при виконанні науково – дослідницьких
робіт складає менш 1%.
Маючи діаграми коефіцієнтів поля швидкісних напорів μ, можна
знайти середню по даному перерізу величину швидкісного напору
q сер , якщо відомий швидкісний напір у будь-якій точці, зокрема, в
контрольній q k , оскільки відомий коефіцієнт поля у цій точці μ k :
49
50.
ρV 22
ρV 2
к
2 = μ
к
сер
де k – значення параметру у контрольній точці.
μ
1.15
у = 300 мм
1.00
0.95
0
400
800 х, мм
Рис. 3. Залежність коефіцієнту поля динамічних тисків μ від координати
точки заміру “x”
Питання для самоконтролю
1. Чим пояснюється нерівномірність швидкісного напору у різних
точках робочої частини АДТ ?
2. Напишіть формулу, згідно якої визначається швидкісний напір.
3. Що таке коефіцієнт швидкісних напорів(швидкісних тисків) ?
4. Як розраховується коефіцієнт швидкісних напорів труби ?
5. Як розраховується швидкісний напір через покази мікроманометру
?
6. Яке призначення контрольної точки заміру швидкісного напору ?
7. Як вимірюється статичний тиск у будь-якій точці робочої частини
АДТ ?
8. Розкажіть про порядок виконання роботи.
50
51.
ЛАБОРАТОРНА РОБОТА 4.ВИЗНАЧЕННЯ РОЗПОДІЛУ ТИСКУ ПО ПОВЕРХНІ КУЛІ
ТА ЦИЛІНДРУ
Мета роботи:
– заміряти тиск на поверхні кулі в екваторіальному перетині та на
поверхні циліндру у нормальному перетині;
– порівняти експериментальні значення розподілу тиску з
теоретичними.
Основні теоретичні положення
Розподіл тиску на поверхні різних тіл вивчається шляхом
проведення аеродинамічного експерименту. Знаючи розподіл тиску,
можна визначити аеродинамічні сили, які діють на тіло, виявити
характер обтікання тіла повітряним потоком, що особливо важливо
при вивченні роботи крила на великих кутах атаки.
Розподіл тиску необхідно також знати при визначені навантаження
при розрахунках на міцність частин літака. В деяких випадках
розподіл тиску можна розрахувати теоретично і порівняти з
експериментальними даними. Таке порівняння дозволяє оцінити
правильність теоретичних досліджень та вихідних передумов для
розрахунку.
У зв’язку з тим, що величина тиску залежить від умов
експерименту (швидкість потоку, розміри моделі, температура та ін.),
то зазвичай за даними експерименту обчислюють безрозмірний
коефіцієнт тиску:
p − p∞
Cp = i
q
ρV 2
– швидкісний напір;
2
р ∞ – статичний тиск у незбуреному потоці;
р і – статичний тиск у точці, де здійснюється замірювання.
де: q =
51
52.
Коефіцієнт тиску однаковий для подібних умов експерименту,тому він знаходить широке використання в аеродинамічних
розрахунках.
Оскільки розміри моделі невеликі у порівнянні з розмірами
відкритої робочої частини аеродинамічної труби, то з достатньою
достовірністю тиск на великих відстанях від моделі можна рахувати
атмосферним. Якщо мікроманометри підключені до моделі у
відповідності зі схемою рис. 1, то коефіцієнт тиску можна підрахувати
за формулою:
(a − a0 ) p c p k p
Cp =
(a − a0 )k ck kk
де індекс "р" відноситься до значень заміряного тиску на поверхні
моделі, а індекс "k" – до заміру швидкісного напору.
В процесі роботи буде визначатись розподіл тиску по поверхні
кулі та циліндру. Для цих тіл є теоретично визначені закони
розподілу тиску по їх поверхні:
9
pi = 1 − sin 2 θ
4
для циліндру: pi = 1 − 4sin 2 θ
для кулі:
,
,
де: θ – полярна координата точки, в якій визначається коефіцієнт
тиску. За нульовий напрям прийнято напрям, протилежний напряму
швидкості.
Обидві теоретичні формули отримані у припущені, що тіла
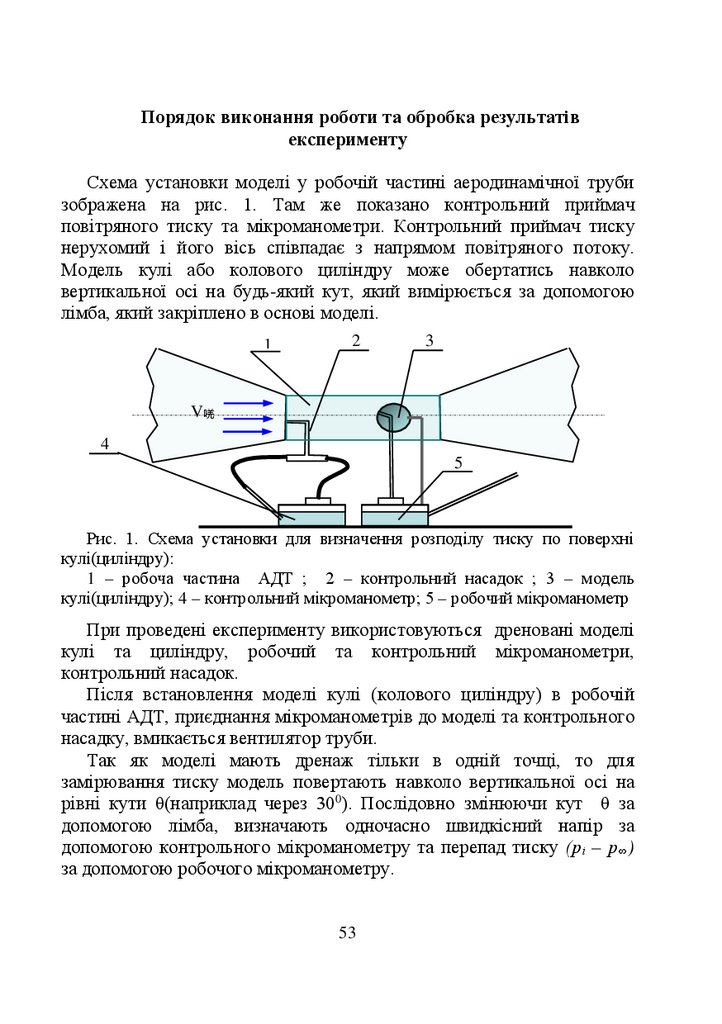
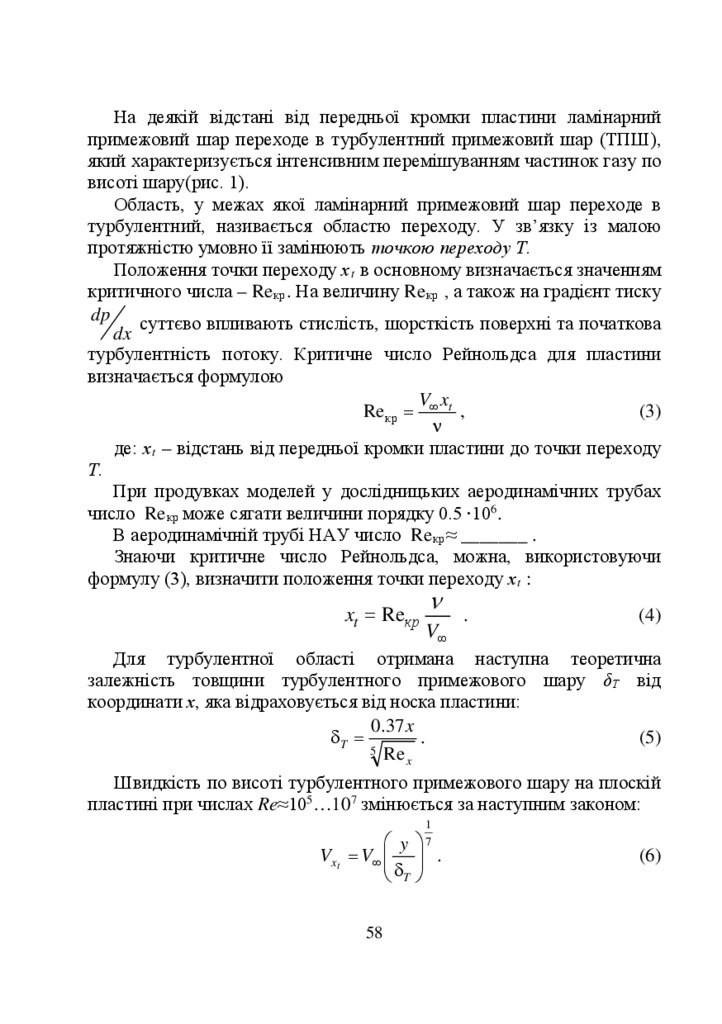
обтікаються потенціальним потоком рідини, тобто властивості
в’язкості не враховуються, внаслідок чого відрив примежового шару
відсутній. Порівняння теоретичного та експериментально визначеного
розподілу коефіцієнтів тиску показує, що в носовій частині тіл, де
обтікання безвідривне, теоретичні та експериментальні дані майже
співпадають. У кормовій частині їх різниця для тіл, що погано
обтікаються, зокрема, для кулі та циліндру, досить суттєва. Ця
різниця і пояснює виникнення сили опору тіл, коли вони рухаються у
повітрі, тобто у середовищі, якому присутні в’язкі властивості.
52
53.
Порядок виконання роботи та обробка результатівексперименту
Схема установки моделі у робочій частині аеродинамічної труби
зображена на рис. 1. Там же показано контрольний приймач
повітряного тиску та мікроманометри. Контрольний приймач тиску
нерухомий і його вісь співпадає з напрямом повітряного потоку.
Модель кулі або колового циліндру може обертатись навколо
вертикальної осі на будь-який кут, який вимірюється за допомогою
лімба, який закріплено в основі моделі.
1
2
3
V唴
4
5
Рис. 1. Схема установки для визначення розподілу тиску по поверхні
кулі(циліндру):
1 – робоча частина АДТ ; 2 – контрольний насадок ; 3 – модель
кулі(циліндру); 4 – контрольний мікроманометр; 5 – робочий мікроманометр
При проведені експерименту використовуються дреновані моделі
кулі та циліндру, робочий та контрольний мікроманометри,
контрольний насадок.
Після встановлення моделі кулі (колового циліндру) в робочій
частині АДТ, приєднання мікроманометрів до моделі та контрольного
насадку, вмикається вентилятор труби.
Так як моделі мають дренаж тільки в одній точці, то для
замірювання тиску модель повертають навколо вертикальної осі на
рівні кути θ(наприклад через 300). Послідовно змінюючи кут θ за
допомогою лімба, визначають одночасно швидкісний напір за
допомогою контрольного мікроманометру та перепад тиску (р і – р ∞ )
за допомогою робочого мікроманометру.
53
54.
Необхідно враховувати, що коефіцієнт тиску може бути якпозитивним (у носовій та кормовій частинах моделі), так і від'ємним (
в районі міделя). У зв’язку з цим при користуванні мікроманометром
необхідно при переході перепаду тиску через 0 (від плюса до мінусу)
гумову трубку, яка поєднує дренований отвір моделі з
мікроманометром, від'єднати від чашки і приєднати до нахильної
трубки, записуючи показання мікроманометра з від’ємним знаком.
Результати вимірювань та розрахунків заносяться в журнал
лабораторних робіт у табличній формі і будуються графіки розподілу
тиску у полярних або прямокутних координатах(рис. 2, 3). Сюди
наносяться і теоретичні криві. У такій же послідовності виконується
експеримент по визначенню розподілу тиску по поверхні циліндру.
Ср
Ср
експеримент
1
0
900
-1
–
1200
600
θ, град
300
теорія
+
-2
-3
–
Рис. 2. Розподіл коефіцієнту
тиску по поверхні циліндру
Рис. 3. Розподіл коефіцієнту
тиску по поверхні циліндру
(теорія)
Питання для самоконтролю
1.
2.
Що називається коефіцієнтом тиску?
З якою метою вводиться поняття коефіцієнту тиску ?
54
55.
3. Напишіть формулу для визначення динамічного тискунезбуреного потоку.
4. В чому полягає різниця обтікання тіла ідеальною рідиною та
в’язкою рідиною ?
5. Запишіть формулу для визначення розподілу коефіцієнту
тиску по поверхні кулі теоретичним шляхом.
6. Запишіть формулу для визначення розподілу коефіцієнту
тиску по поверхні циліндру теоретичним шляхом.
7. Розкажіть, що є причиною виникнення сили лобового опору
при обтіканні кулі в’язкою рідиною.
8. Розкажіть порядок виконання експерименту.
9. Наведіть графік розподілу коефіцієнту тиску по поверхні кулі,
отриманий теоретичним шляхом.
10. Наведіть графік розподілу коефіцієнту тиску по поверхні
циліндру, отриманий теоретичним шляхом.
55
56.
ЛАБОРАТОРНА РОБОТА 5.ВИЗНАЧЕННЯ ХАРАКТЕРИСТИК ПРИМЕЖОВОГО ШАРУ
Мета роботи – розкрити фізичну сутність утворення примежового
шару на плоскій пластині при обтіканні її повітряним потоком;
–
закріпити знання основних теоретичних положень про
ламінарний та турбулентний примежовий шар;
– проаналізувати епюру швидкостей та визначити товщину
ламінарного та турбулентного примежовий шару на пластині,
розрахувати положення точки переходу. Експериментальні дані
порівняти з результатами розрахунків.
Основні теоретичні положення
При вирішені задач щодо визначення сил тиску при обтіканні тіл
повітряним потоком зазвичай вважають газ нестислим середовищем.
В дійсності будь-який газ, у тому числі і повітря, є в’язким. Вплив
в’язкості проявляється помітним чином лише у тонкому шарі навколо
поверхні, яка ним обтікається. Прояв в’язких властивостей реального
газу міститься в першу чергу у виникненні градієнту швидкості
dV
поміж шарами рухомого газу, що призводить до гальмування
dy
потоку біля поверхні тіла. Гальмування потоку, обумовлене в’язкістю
газу, призводить у першу чергу до зміни інших параметрів потоку
(дотичних сил напруги, температури, тиску, щільності) і
розповсюджується на досить велику область навколо тіла. Цю область
називають примежовим шаром. Тобто, примежовий шар – це тонкий
шар рідини або газу, який прилягає до поверхні тіла, що обтікається,
і в якому проявляються в’язкі властивості, внаслідок чого швидкість
змінюється від 0 на поверхні тіла до швидкості незбуреного потоку.
Як товщину примежового шару δ умовно вважають висоту шару
рухомого газу біля поверхні тіла, на межі якого швидкість
відрізняється не більше, ніж на 1% від швидкості незбуреного
потоку, тобто V δ ≈0.99V ∞ .
56
57.
Зазвичай при обтіканні тіл спостерігається змішаний при- межовийшар, який складається з ламінарної та турбулентної ділянок шару(рис.
1).
Турбулентний примежовий шар
V∞
Ламінарний примежовий шар
δ
у
δЛ
V∞
0
хТ
х
Т
Рис. 1. Схема обтікання плоскої пластини повітряним потоком
Попереду передньої кромки пластини утворюється ламінарний
примежовий шар(ЛПШ). Його товщина зростає по мірі збільшення
відстані від передньої кромки пластини пропорційно х1/2, тому що все
усе більша кількість частинок повітря гальмується поблизу поверхні
пластини. Теоретично отримана наступна залежність між товщиною
ламінарного примежового шару δ л
і координатою х, яка
відраховується від носка пластини:
4.64 x
,
(1)
δл =
Re x
де: х – координата перерізу потоку, в якій визначається товщина
примежового шару;
V x
Re x = ∞ — число Рейнольдса для перерізу, в якому визначають
ν
параметри примежового шару.
Швидкість по висоті ламінарного примежового шару на плоскій
пластині змінюється за параболічним законом:
3 y 1 y 3
(2)
Vx л = V∞
− ,
2 δ л 2 δ л
де: у – відстань (висота) по нормалі від поверхні пластини, на якій
визначається швидкість (у ≤ δ л ).
57
58.
На деякій відстані від передньої кромки пластини ламінарнийпримежовий шар переходе в турбулентний примежовий шар (ТПШ),
який характеризується інтенсивним перемішуванням частинок газу по
висоті шару(рис. 1).
Область, у межах якої ламінарний примежовий шар переходе в
турбулентний, називається областю переходу. У зв’язку із малою
протяжністю умовно її замінюють точкою переходу Т.
Положення точки переходу х t в основному визначається значенням
критичного числа – Re кр . На величину Re кр , а також на градієнт тиску
dp
суттєво впливають стислість, шорсткість поверхні та початкова
dx
турбулентність потоку. Критичне число Рейнольдса для пластини
визначається формулою
V x
(3)
Re кр = ∞ t ,
ν
де: х t – відстань від передньої кромки пластини до точки переходу
Т.
При продувках моделей у дослідницьких аеродинамічних трубах
число Re кр може сягати величини порядку 0.5 ∙106.
В аеродинамічній трубі НАУ число Re кр ≈ _______ .
Знаючи критичне число Рейнольдса, можна, використовуючи
формулу (3), визначити положення точки переходу х t :
xt = Reкр
ν
V∞
.
(4)
Для турбулентної області отримана наступна теоретична
залежність товщини турбулентного примежового шару δ Т від
координати х, яка відраховується від носка пластини:
0.37 x
.
(5)
δT =
5 Re
x
Швидкість по висоті турбулентного примежового шару на плоскій
пластині при числах Re≈105…107 змінюється за наступним законом:
1
y 7
Vxt = V∞ .
δT
58
(6)
59.
Експеримент виконується з використанням плоскої металевоїпластини 7, яка встановлюється у робочій частині аеродинамічної
труби під нульовим кутом атаки (рис. 2).
Поза
межами
робочої
частини
аеродинамічної
труби
встановлюються нерухомо два приймача повного тиску(ППТ) 6 таким
чином, що вони здатні переміщатись по нормалі відносно пластини.
Приймачі повного тиску розташовані у двох перетинах повітряного
потоку на відстанях х 1 та х 2 від носка пластини. Переміщення
приймачів повного тиску у перпендикулярних до пластини напрямках
здійснюється за допомогою мікрометрів, жорстко закріплених поза
межами робочої частини АДТ
2
1
3
7
4
6
5
р
V
х1
х2
Рис. 2. Схема експериментальної установки
При обертанні ноніусної головки 1 мікрометра шток 3 через хомут
4, який закріплено на трубці приймача повного тиску 6, переміщує
приймач на задану величину, Пружина 5 забезпечує постійний
контакт хомута зі штоком. Переміщення приймача повного тиску
визначається по нонісному пристрою мікрометра.
Повний тиск розраховується по показанням мікроманометра 2,
який підключено до приймача повного тиску.
Порядок виконання роботи та обробка результатів
експерименту
59
60.
Розрахувати по формулі (4) положення точки переходу х t ваеродинамічній трубі для швидкості потоку V ∞ =15…20м/с.
По формулам (1), (5) розрахувати теоретичне значення товщини
ламінарного та турбулентного примежового шару, а за формулами (2),
V
y
(6) розрахувати та побувати залежності V x =f(y), x = f (рис. 3).
V∞
δ
а)
у , мм
б
у/δ
1
х2
δт
х2
х1
δл
х1
0
V∞ V, м/с
0
1 V/ V∞
Рис. 3. Зміна швидкості по товщині ламінарного(х1) та турбулентного(х2)
примежового шару: а – в абсолютних одиницях, б – у відносних одиницях
Експериментально визначити швидкість потоку по товщині
примежового шару у ламінарній та турбулентній областях. Для цього
підняти у досліджуваному перетині приймач повного тиску (рис. 2) на
таку відстань від поверхні пластини , при якій мікроманометр покаже
величину швидкісного напору незбуреного потоку (показання
мікроманометру не змінюються). Потім повільно наближати приймач
повного тиску до пластини , спостерігаючи за показаннями
мікроманометру. З початком зменшення рівня рідини у трубці
мікроманометру, що нахиляється, зупинити переміщення ППТ та
записати показання мікроманометра та мікрометра. Після цього,
наближуючи ППТ до пластини, через кожні 4…5 мм зменшення рівня
рідини у трубці мікроманометра записувати відповідні показання
мікроманометра і мікрометра. В момент торкання приймача повного
тиску поверхні пластини буде мінімальна відстань заміру швидкості,
яка дорівнюватиме половині діаметра трубки приймача:у min =0.5d.
Заміри швидкості можна зробити і в зворотному напрямі: від
поверхні пластини до межі шару (відстань від поверхні, коли
60
61.
показаннямікроманометру
перестануть
змінюватись,
буде
відповідати товщині примежового шару).
За
отриманими
в
експерименті
значеннями
показань
мікроманометру (а–а 0 ) та відповідними їм значенням у′ (показання
мікрометра) необхідно визначити швидкість V ∞ = V х на відповідних
відстанях "у" від поверхні пластини і нанести їх у вигляді точок на
побудовані перед цим теоретичні залежності (рис. 3).
2
(a − a0 )Kε
Vx = V∞ =
ρ
у= у′– у 0 +0.5d ,
де: (а–а о ) – показання мікроманометра різниці повного та статичного тисків повітряного потоку в робочій частині АДТ;
К – коефіцієнт мікроманометра (від 0,2 до 0,8);
ε – тарувальний коефіцієнт приймача повітряного тиску.
у – відстань від поверхні пластини приймача повного тиску;
у′ – покази мікрометра;
у 0 – покази мікрометра при торканні приймача повного тиску
поверхні пластини;
d – діаметр трубки ППТ.
Порівняти розрахункові та експериментальні значення товщини
ламінарного та турбулентного примежових шарів.
По отриманим залежностям (рис. 3) проаналізувати характер зміни
швидкості потоку по товщині примежового шару у розглянутих
перетинах та зробити висновки.
Питання для самоконтролю
1.
2.
3.
4.
5.
6.
7.
8.
Що називається примежовим шаром ?
Чим обумовлено утворення примежового шару ?
Який примежовий шар зветься ламінарним ?
Який примежовий шар зветься турбулентним ?
Що таке точка переходу і чим визначається її положення ?
Що розуміють під товщиною примежового шару ?
Як змінюється швидкість по товщині примежового шару ?
Як змінюються параметри газу по товщині примежового шару
?
61
62.
9. Чим викликані і як визначаються сили тертя в ламінарному ітурбулентному примежовому шарі ?
10. Поясніть явище відриву примежового шару.
62
63.
ЛАБОРАТОРНА РОБОТА 6.ВИЗНАЧЕННЯ КРИТИЧНОГО ЧИСЛА РЕЙНОЛЬДСА КУЛІ
ТА ПОЧАТКОВОЇ ТУРБУЛЕНТНОСТІ В АЕРОДИНАМІЧНІЙ
ТРУБІ
Мета роботи – визначити критичне число Рейнольдса (Re) кулі;
– за визначеним значенням критичного числа Re визначити ступінь
початкової турбулентності потоку в аеродинамічній трубі.
Основні теоретичні положення
Кінематичні та динамічні характеристики потоку, що обтікає
тверде тіло, суттєво залежать від декількох безрозмірних величин –
критеріїв динамічної подібності (число Re , M та ін.).
Значення критеріїв подібності, при яких при малих змінах значень
критерію суттєво змінюються характеристики потоку, називають
критичними, а саме явище – кризою обтікання.
Криза обтікання обумовлена різкими змінами фізичної картини
обтікання. В аеродинаміці важливе значення має криза, обумовлена
в’язкістю середовища. У певному діапазоні
значень критерію
подібності числа Re, що характеризує співвідношення сил інерції і
тертя, відбувається перехід ламінарної
течії у турбулентну, при
а)
цьому зростає опір тертя.
В той же час значно зростає кінетична енергія примежового шару,
що призводить до зміщення точок відриву примежового шару до
задньої критичної точки і зростанню тиску у кормовій частині
тіла(рис. 1а, б).
Рис. 1. В'язка криза при обтіканні кулі: а – Re= 15000; б – Re=30000
63
б)
64.
Зростання тиску у кормовійчастині настільки велике, що
розрідження при передкризовому обтіканні змінюється надлишковим
тиском при після кризовому обтіканні, що зменшує силу лобового
опору.
Таким чином, коефіцієнт лобового опору незручно обтічних тіл
(опір, в основному, за рахунок сил тиску) в наслідок кризи не тільки
не зростає, як у зручно обтічних тіл (опір, в основному, за рахунок
сил тертя), а навіть зменшується, наприклад при обтіканні кулі, – у
3…4 рази.
Критичні значення числа Re, які визначені в різних
аеродинамічних трубах, різняться між собою, оскільки значення Re кр
в більшій мірі залежать від ступеню початкової турбулентності
набігаючого потоку.
У турбулентному потоці швидкості частинок рідини у фіксованій
точці простору швидко змінюються як за величиною, так і за
напрямом. У зв’язку з цим при вивчені турбулентних течій вводять
поняття усередненої швидкості течії та пульсації швидкості.
Усередненою швидкістю V осер течії у даній точці простору у даний
момент часу t при заданому інтервалі усереднення T називають
величину, яка визначається із співвідношення
t+
T
1 2
Vусеред (t ) =
∫ Vdt ,
T T
t−
2
де V(t) – істинна швидкість потоку у даній точці простору.
Пульсацією швидкості у даній точці простору у даний момент
часу t називають різницю між істиною та осередненою швидкістю
∆V (t ) = V (t ) − Vусеред (t ) .
Чим більша величина пульсації швидкості у порівнянні із
осередненою швидкістю, тим більша турбулентність потоку.
Дослідження свідчать, що критичне число Re для кулі залежить в
основному тільки від ступеня турбулентності набігаючого потоку,
тобто від величини ε. Ця залежність отримана в експериментах, при
яких ступінь турбулентності вимірюється доволі складними
способами, наведена на рис. 2.
За ступінь турбулентності потоку ε приймають величину
відношення середньо квадратичного відхилення пульсації швидкості
64
65.
ΔV за часом t до осередненої швидкості V усеред у тій же самій точціза один і той же проміжок часу Т:
T
1 t+ 2 2
T ∆V dt
T ∫t − 2
ε=
T
1 t+ 2
T Vосер dt
T ∫t − 2
100% .
При зміні ступеню турбулентності критичне число Рейнольдса
Reкр приймає різні значення. Ступінь початкової турбулентності
потоку пов’язана з Reкр залежністю
% 0,5exp ( 1 − Reкр ⋅10−5 ) .
ε=
ε, %
3
2
1
0
1
3
Re кр10−5
Рис. 2. Залежність Re кр від ступеню початкової турбулентності потоку ε
Чим менше Reкр , тим більше ступінь турбулентності (дивись рис.
2). За допомогою цього графіка можна визначати ступінь
турбулентності значно простіше – опосередкованим шляхом,
використовуючи в якості приладу для заміру турбулентності
дреновану або не дреновану кулю.
В експериментальній аеродинаміці дослідження обтікання кулі
використовується для визначення
внаслідок її великої чуттєвості
до характеру обтікання.
ε
65
66.
Визначитикритичне
число
Reкр
і
встановити
ступені
турбулентності можна двома методами: за допомогою дренованої кулі
– за різким зростанням коефіцієнта тиску C p в області задньої
критичної точки тіла, який з від’ємного до кризи стає додатнім після
кризи (рис. 3), тобто виміром перепаду тисків, або з різким зниженням
коефіцієнта лобового опору C xp шляхом виміру коефіцієнта лобового
опору не дренованої кулі на аеродинамічних вагах (рис. 3.б).
Сх
0.3
0.2
0.1
0.05
1 1.5 2
3 4
1 1.5 2
3
а)
10
Re кр10-5
Ср
0.2
0
-0.2
-0.4
10 Re кр10-5
б)
Рис. 3. Залежність коефіцієнтів: – лобового опору (а), - тиску (б) від числа
Re для кулі
4
66
67.
Зміна початкової турбулентності потоку призводить до змінирозподілу тиску у кормової частині кулі, що визначається полярними
координатами Θ =150 ...210 ( Θ − кут між радіусом, проведеним до
точки виміру, і напрямком потоку).
Вимірюючи при різних швидкостях потоку у робочій частині
V ⋅d
аеродинамічної труби (різних числах Re = cx ; d – діаметр кулі; ν
ν
− коефіцієнт кінематичної в’язкості) перепад тиску у точці повного
гальмування ( Θ = 0 ) та у точці з полярною координатою
Θ = 157 30′ можна побудувати залежність
де:
P0 − PΘ=157 30′
1 C pk =f ( Re ) ,
∆C p =
=−
ρ∞V∞2
2
P
−P
=
V
ρ
2
(a − a )
(a − a )
∞
0 Θ 157 30′
30′
=
Θ 157=
pк
2
∞
0 Θ=0
С
=
За перепадом
∆C p = 1, 22 ,
К
.
(2)
(3)
як показують численні дослідження,
визначається критичне число Reкр (рис. 4). Ступінь турбулентності
потоку визначається за графіком рис. 2.
67
68.
Ср2
3
Θ = 1570301
1.4
V∞
1.2
1
PΘ
1.0
0.8
1.6
2.0
1.2
2.4
Re 10-5
Рис. 4. Залежність коефіцієнту тиску Ср від числа Re для різних ступенів
початкової турбулентності : 1: ε = 1%, 2: ε = 1.5%, 3: ε = 2.5%
Порядок виконання роботи та обробка результатів експерименту
Визначення критичного числа Re кр та початкової турбулентності
ε проводиться шляхом продувки моделі кулі діаметром d в
аеродинамічній трубі при різних швидкостях потоку (числа Re ) в
наступній послідовності:
– встановити кулю у робочій частині АДТ і виміряти перепад
тисків при Θ = 0 та Θ = 157 30′ при різних швидкостях потоку;
– обчислити ∆C pk за формулою (3), ∆C p за формулою (2), число
V
Re = ∞ ; швидкість потоку
V∞
=
ν
2
(a − a )
0 Θ=0
ρ
– побудувати залежність ∆C p = f (Re) ;
–
К;
за величиною ∆C p = 1,22 на графіку ∆C p = f (Re) визначити
Re кр ;
– визначити величину ступеню початкової турбулентності потоку
аеродинамічної труби ε за графіком рис. 1.
68
69.
Питання для самоконтролю1. Від чого залежать кінематичні характеристики повітряного
потоку ?
2. У чому різниця між ламінарною та турбулентною течіями ?
3. В чому сутність кризи обтікання тіл ?
4. В чому зміст в’язкої кризи при обтіканні кулі ?
5. Як визначити Re кр шляхом вимірювання сили лобового опору
кулі ?
6. Як визначити початкову турбулентність потоку ε шляхом
вимірювання сили лобового опору кулі ?
7. Розкажіть послідовність виконання роботи.
69
70.
ЛАБОРАТОРНА РОБОТА 7.ВИЗНАЧЕННЯ КОЕФІЦІЄНТІВ ЛОБОВОГО ОПОРУ ТІЛ
РІЗНОЇ ФОРМИ
Мета роботи – експериментальне визначення коефіцієнтів
лобового опору тіл різної форми (диска, прямого і зворотного конусів,
кулі та інших) ваговим методом;
– проаналізувати вплив форми тіла на величину коефіцієнта
лобового опору;
– проаналізувати вплив якості обробки поверхні тіла на величину
його коефіцієнта лобового опору.
Основні теоретичні положення
При обтіканні тіла повітряним потоком на нього з боку потоку
діють сили тиску (нормальні до тіла) і сили тертя (дотичні до тіла), які
можуть бути зведені в загальному випадку до головного вектора
повної аеродинамічної сили R і головного моменту M . Якщо
обтікається тіло обертання при куті атаки α = 0 , то головний вектор
аеродинамічної сили буде спрямований вздовж осі тіла, а момент
відносно точки, що лежить на осі, буде дорівнювати нулю. У цьому
разі існує тільки проекція головного вектора аеродинамічної сили на
напрямок потоку, яка називається силою лобового опору Х.
Сила лобового опору тіла при дозвуковій швидкості обумовлена
силами тиску ( X тис ), тобто розподілом тиску по поверхні тіла та
силами тертя ( X тер ). При обтіканні тіл, які мають кормовий зріз,
лобовий опір від сил тиску зручно додатково розділити на донний
опір X дос та на опір, обумовлений силами тиску на бічні поверхні,
тобто
X = X тис + X дон + X тер
Тіла, лінійний розмір яких значно більший за поперечний і
основна складова сили опору створюється за рахунок сил тертя ,
називають зручно обтічними.
70
71.
Тіла, лінійний розмір яких менший чи дорівнює поперечному іосновна складова опору створюється за рахунок сил тиску, називають
незручно обтічними.
В експериментальній аеродинаміці сила лобового опору
визначається за допомогою формули
ρV 2
X = Cx ∞ S ,
2
де: C x – коефіцієнт лобового опору;
S – характерна площа тіла.
Для тіла обертання за характерну площу приймають площу
міделевого перерізу ( S мід ), тобто площу того перерізу, проекція якого
на площину, нормальну до напрямку руху, є найбільшою.
Коефіцієнт лобового опору можна визначити як
X
.
Cx =
2
ρV∞
S мід
2
Величина коефіцієнту лобового опору залежить від багатьох
факторів, в першу чергу від форми тіла, типу примежового шару,
шорсткості поверхні, числа Re .
V d
Re = ∞ мід ,
ν
де: V∞ – швидкість повітряного потоку;
d мід – діаметр тіла у міделевому перерізі,
ν – коефіцієнт кінематичної в’язкості повітря.
При продувці тіл ваги вимірюють сумарну силу опору тіла X ′ , яка
складається власне з сили опору тіла Х та сили опору утримуючого
пристрою (державки) з розтяжкою − ∆X , тобто
X ′ = X + ∆X .
Тому треба визначити ∆X = f (q ) і побудувати графік цієї
ρV∞2
– швидкісний напір.
2
Експериментально
визначення
сили
лобового
опору
досліджуваного тіла X виконується шляхом зважування тіла на
аеродинамічних вагах. З цією метою тіло за допомогою утримуючого
залежності(рис. 2), де q =
71
72.
пристрою підвішується до ваг з таким розрахунком, щоб вонознаходилось в робочій частині труби (рис. 1).
Y′
Насадок для
замірювання
швидкісного напору
Х′
Утримуючий пристрій
V∞
Досліджуване тіло (конус)
K2
K1
Рис. 1. Схема підвіски досліджуваного тіла на аеродинамічних вагах для
визначення його сили лобового опору.
До розтяжок ваг кріпляться контргрузи К 1 , К 2 , призначення яких –
створити попередній натяг розтяжок ваг. У створі сопла робочої
частини труби встановлюють насадок, поєднаний з мікроманометром,
для заміру швидкісного напору qca = (а-а 0 )k.
Порядок виконання роботи та обробка результатів
експерименту
У лабораторній роботі визначається сила лобового опору тіл різної
форми з однаковою площею міделевого перерізу.
Закріпити досліджуване тіло на утримуючому пристрої
аеродинамічних ваг. Урівноважити на вагах контргрузи. За для цього
грузи, які зважують, переміщують до нульових відміток шкал і за
допомогою балансуючих грузів урівноважити ваги.
72
73.
Увімкнути АДТ і при постійному режимі її роботи записатипоказання мікроманометра ( a − a0 ) та показання ваг X′.
Змінити швидкість потоку і знову зняти показання.
Експеримент провести для 5...6 значень швидкості.
Таким же чином визначити силу опору державки (рис. 2) з
розтяжками ∆X та побудувати тарувальний графік залежності
∆X = f (q ) .
Після визначення сил лобового опору досліджуваних тіл,
розрахувати коефіцієнти лобового опору цих тіл та порівняти їх.
ΔХ ,кг
0.15
0.1
0.05
0
50
(а-а0) К,мм
Рис. 2. Тарувальний графік залежності сили лобового опору утримуючого
пристрою ΔХ від швидкісного напору q=(a-a 0 )К (у показах мікроманометру)
Визначити, яке тіло має найменше та найбільше значення
коефіцієнту лобового опору, пояснити цю різницю.
73
74.
Вплив якості обробки поверхні визначається за результатамипродувки двох тіл однакової форми (краще брати тіла обертання,
наприклад, снаряд), але із різною якістю обробки їх поверхні.
Визначаються сили лобового опору цих тіл Х та розраховуються їх
коефіцієнти С х .
Питання для самоконтролю
1. Що таке сила лобового опору, які її складові ?
2. Поясніть сутність сили лобового опору тертя ?
3. Поясніть сутність сили донного опору.
4. Які фактори впливають на величину коефіцієнта сили
лобового опору тіла ?
5. Як враховується лобовий опір утримуючого пристрою при
визначенні лобового опору тіла ?
6. Розкажіть порядок виконання роботи.
74
75.
ЛАБОРАТОРНА РОБОТА 8.ВИЗНАЧЕННЯ ВПЛИВУ ФОРМИ КРИЛА В ПЛАНІ НА
ЙОГО РОЗПОДІЛЕНІ АЕРОДИНАМІЧНІ ХАРАКТЕРИСТИКИ
Мета роботи – розкрити фізичну сутність впливу форми крила в
плані на його розподілені аеродинамічні характеристики;
– закріпити знання основних теоретичних положень стосовно
впливу форми крила в плані на його розподілені аеродинамічні
характеристики;
– на підставі експерименту побудувати картини розподілу тиску
у кореневому, середньому та кінцевому перерізах моделей
прямокутного, стрілоподібного та трикутного крил. На підставі
отриманих результатів побудувати залежності коефіцієнтів перерізів
від розмаху C y' та форми крила. Провести порівняльний аналіз.
Основні теоретичні положення
Вивчаючи вплив сил тиску на тіло, що обтікається, визначають
зазвичай не абсолютні, а надлишкові тиски у різних точках поверхні
тіла. Для нестислого потоку надлишкові тиски визначаються за
рівнянням Бернуллі, записаному у наступному вигляді:
ρV 2 ρV 2
(1)
pi − p∞ = ∞ − i ,
2
2
де: р і та V і – статичні тиск та швидкість у розглядуваній і- тій
точці на поверхні тіла;
р ∞ та V ∞ – статичні тиск та швидкість у незбуреному потоці;
(р і – р ∞ ) – надлишковий тиск в і-тій точці.
За надлишковим тиском (р і – р ∞ ) визначаємо коефіцієнт тиску с рі
у точці, що розглядається:
ρV∞2 ρVi 2
2
−
Vi
pi − p∞
2
2
(2)
C pi =
=
= 1 −
ρV∞2
ρV∞2
V∞
2
2
75
76.
Визначивши значення коефіцієнтів тиску с рі , можна побудуватиабо векторну діаграму по поверхні тіла (наприклад профілю), або
епюру розподілу коефіцієнту тиску по хорді профілю (у деяких
джерелах – хордова діаграма коефіцієнтів тиску).
Так, у випадку обтікання крила потоком рідини чи газу,
відкладаючи у прийнятому масштабі та з урахуванням знаку с рі у
кожній точці по нормалі до профілю, отримаємо векторну
діаграму(рис. 1а). Діаграма такого виду наглядно показує розподіл
коефіцієнтів тиску по поверхні тіла, що обтікається, (надає якісну
картину розподілу тиску навколо тіла). Однак вона складна для
побудови і не дозволяє розрахувати по ній аеродинамічні коефіцієнти
нормальної сили с у1 , подовжньої сили тиску с х1 р , моменту тангажу m z
та інші.
α
cp
V∞ C p
B
–1
Рі < Р∞
α
V∞
Р∞
+
Cp
В
x
0
c pн
Cp
Рі > Р∞
_
+1
а)
н
1
б)
Рис. 1. Розподіл коефіцієнтів тиску : а – векторна діаграма розподілу
коефіцієнтів тиску по поверхні профілю крила; б – епюра розподілу
коефіцієнтів тиску по хорді профілю перерізу крила (хордова діаграма)
Якщо ж відкладати у масштабі та з урахуванням знаку величини с рі
по нормалі до хорди профілю у точках, які відповідають проекціям на
хорду розглядуваних точок профілю, отримаємо епюру розподілу
коефіцієнтів тиску по хорді профілю(рис. 1б). На горизонтальній вісі
епюри зазвичай відкладають безрозмірні абсциси
76
77.
x=x
b
,
де: х – абсциса і-тої точки;
b – хорда профілю(геометрична хорда даного перерізу крила).
Від'ємні значення коефіцієнтів тиску відкладаються уверх, а
додаткові – вниз.
У передній критичній точці профілю, де V і =0, коефіцієнт тиску
с рі =+1 (дивись формулу 2).
Коефіцієнт підйомної сили перерізу крила C y' визначається
наступним чином:
1
F
(3)
C y' = ∫ c p H − c p B d x =
mc p mx
0
(
)
()
()
де: F – площа, яка обмежена кривими, c p B = f x та c pH = f x см2.
mc p та mx – масштабні коефіцієнти, які дорівнюють кількості
сантиметрів на епюрі, що відповідають одиниці с р та одиниці x , см.
Коефіцієнт підйомної сили крила с у в цілому може бути
визначеним за формулою:
1 1 b′
(4)
cd z
cy = ∫
2 0 bсер
де: b' – хорда перерізу крила;
b сер – середня хорда крила;
z=
z
l
– відносна координата поточного перерізу крила, яка
2
відраховується вздовж розмаху від плоскості симетрії крила.
Величина підйомної сили, яка приходиться на одиницю розмаху
крила, зветься навантаженням. Розподіл навантаження по розмаху
крила характеризується залежністю місцевих значень коефіцієнта
підйомної сили C y' від координати z та зміною хорди перерізів крила
()
по розмаху b' . На характер залежності С y' = f z найбільший вплив
мають стрілоподібність крила по передній кромці χ, звуження η та
подовження крила λ. При досить малих кутах атаки (які відповідають
77
78.
льотному діапазону кутів атаки) можна рахувати, що коефіцієнтинормальної та підйомної сил рівні c'y = c y .
Порядок виконання роботи та обробка результатів
експерименту
Експеримент виконується на моделях прямого, стрілоподібного та
трикутного крил(рис. 2). Дренована у трьох перерізах (z 1 , z 2 та z 3 )
модель крила (рис. 3) встановлюється у робочій частині
аеродинамічної труби. Тиски у точках на поверхні крила у
розглядуваних перерізах передаються через отвори по резинових
трубках до батарейного манометру.
Виміри тиску у вказаних на рис. 2 точках поверхні моделі у трьох
її перерізах дозволяють побудувати епюру розподілу коефіцієнтів
тиску у кожному перерізі, розрахувати значення коефіцієнтів C y' та
побудувати залежність C y' = f ( z ) для кожної з трьох моделей крила.
При продувці трьох моделей крила заміряються по нахильному
батарейному манометру надлишкові тиски у всіх точках перетинів
кожного з крил:
р і −р ∞ = ρ рід ·g·h i ·sinφ,
(5)
де: ρ рід – щільність рідини, яка залита у батарейний манометр;
h i – висота стовпчика рідини в трубці батарейного манометру,
поєднаної з і-тою точкою поверхні моделі крила;
φ – кут нахилу батарейного манометру.
Розрахувати коефіцієнти тиску у всіх точках розглядуваних
перерізів крила, використовуючи для цього формулу 2:
ρ рід ghi sin φ
p −p
C pi = i 2 ∞ =
(a − a0 )∞ K ∞µ
ρV∞
2
де:(а-а 0 ) ∞ К ∞ – динамічний тиск незбуреного потоку в
аеродинамічній трубі у показаннях мікроманометру;
μ – середній коефіцієнт поля динамічних тисків робочої частини
АДТ.
78
79.
а)б)
в)
z1
z2
z3
=
z 1 0.05;
=
z 2 0.4;
=
z
0.7
3
Рис. 2. Моделі крил (а – прямокутне, б – стрілоподібне; в – трикутне) та
розташування перерізів, в яких заміряються тиски при проведені
експерименту
Коефіцієнт μ визначається в спеціальних дослідах і в даній
лабораторній роботі повідомляється викладачем.
Побудувати епюри розподілу коефіцієнтів тиску для розглядаємих
перерізів крил (рис. 1б).
Визначити площі епюр та обчислити значення коефіцієнтів C y'
розглядуваних перерізів усіх трьох крил(формула 3).
79
80.
А– Аz1
V唴
z2
z3
А
А
До батарейного манометру
Рис. 3. Схема дренованої у трьох перерізах моделі стрілоподібного крила
Побудувати залежності C y' = f ( z ) для моделей прямокутного,
стрілоподібного та трикутного крил(рис. 4).
Після того, як побудовано залежності C y' = f ( z ) для трьох крил,
необхідно звернути увагу на наступні обставини.
Збільшення стрілоподібності крила призводить до збільшення
коефіцієнтів C y' кінцевих перерізів крила. У цьому зв’язку із
збільшенням кутів атаки зрив потоку починається у тих перерізах
стрілоподібного та трикутного крил, де місцеві значення C y' вперше
80
81.
досягнуть значеньC y'
початку зриву. Повільне (безвідривне)
обтікання крила при цьому стає неможливим. Наявність кінцевого
зриву призводить до погіршення не тільки несучих властивостей, але і
до погіршення характеристик сталості та керованості літака.
С′y
χ = 00
χ = 450
χ = 600
0
0.2
α = const
0.4
0.6
0.8
z
Рис. 4. Залежність коефіцієнтів підйомної сили у перерізах крила по розмаху
від форми крила в плані
На прямокутному крилі місцеві значення C y' вперше досягнуть
значень C y' початку зриву у кореневих перерізах, що призводить до
різкого падіння підйомної сили всього крила.
На кінцях усіх крил, внаслідок вирівнювання тиску на нижніх та
верхніх поверхнях, місцеві значення коефіцієнтів C y' різко
зменшуються і при z = 1 стають рівними нулю.
Із збільшенням звуження крила η місцеві значення коефіцієнтів
підйомної сили C y' по мірі наближення до кінця крила збільшуються
інтенсивніше, у порівнянні із збільшенням кута стрілоподібності χ.
Однак навантаження, яке визначається добутком c'y b' , не дивлячись
на різке збільшення коефіцієнтів C y' на кінцях крила, внаслідок
81
82.
зменшення хорд перерізів крила (b′→0 для трикутного крила)зменшується.
Для запобігання відриву потоку в кінцевих перерізах крил
виконують геометричну та аеродинамічну крутку, встановлюють
аеродинамічні гребені та ін.
Питання для самоконтролю
1. Назвіть основні геометричні параметри крила.
2. Назвіть основні геометричні параметри профілю крила.
3. Які системи координат використовуються в аеродинаміці ?
4. Як називаються проекції аеродинамічних сил на осі
швидкісної та зв’язаної системи координат ?
5. Дайте визначення кута атаки крила.
6. Нарисуйте на поясніть векторну діаграму коефіцієнтів тиску
навколо профілю.
7. Нарисуйте на поясніть епюру розподілу коефіцієнтів тиску по
хорді профілю перерізу крила.
8. Як змінюється епюра розподілу коефіцієнтів тиску по хорді
профілю крила при збільшені кута атаки ?
9. Як змінюється епюра розподілу коефіцієнтів тиску по хорді
профілю крила при зменшені кута атаки ?
10. Як визначається коефіцієнт підйомної сили перерізу крила С' у
по епюрі розподілу коефіцієнтів тиску ?
11. Нарисуйте графік залежності C y' = f ( z ) для прямого та
стрілоподібного крил.
12. Поясніть вплив стрілоподібності
C y' = f ( z ) .
82
крила
на
залежність
83.
ЛАБОРАТОРНА РОБОТА 9.ВИЗНАЧЕННЯ СУМАРНИХ АЕРОДИНАМІЧНИХ
ХАРАКТЕРИСТИК КРИЛА
Мета роботи:
– розкрити фізичну сутність та закріпити знання основних
теоретичних положень щодо впливу форми крила в плані на його
сумарні аеродинамічні характеристики;
– визначити експериментальним шляхом залежності коефіцієнтів
підйомної сили, сили лобового опору, аеродинамічної якості від кута
атаки та поляри крила для прямокутного та стрілоподібного крил.
Отримані залежності порівняти між собою.
Основні теоретичні положення
Для отримання аеродинамічних характеристик крила шляхом
продувки його в аеродинамічній трубі, на аеродинамічних вагах
вимірюють підйомну силу та силу лобового опору, а потім за
відповідними формулами визначають коефіцієнти С у , С х , К для
різних кутів атаки:
Y
Y
X
; Cx =
;
K=
.
Cy =
2
2
SρV
X
SρV
2
2
Для визначення аеродинамічних характеристик беремо крило
прямокутної форми в плані з подовженням λ = 5. Для вимірювання
аеродинамічних сил модель крила за допомогою утримуючого
пристрою закріплюється на аеродинамічних вагах у трьох точках. За
допомогою кронштейнів дві передні точки закріплюються на передніх
підвісках, а задня точка – до задньої підвіски.
Підйомна сила крила визначається показниками вагових елементів
Р 1 та Р 2 . Сила лобового опору визначається показниками вагового
елементу Х. Підйомна сила крила визначається за формулою:
Y = (Р 1 – Р 10 ) + с 2 (Р 2 – Р 20 ) ,
де: Р 1 , Р 2 – показники відповідних вагових елементів під час
експерименту;
83
84.
Р 10 , Р 20 – вихідні показники вагових елементів для кожного кутаатаки без впливу потоку на модель;
с 2 – передаточний коефіцієнт вагового елементу.
Коефіцієнт с 2 визначається за формулою:
c2 =
R
,
l cos α
де: R – радіус сектору, який дорівнює 300 мм (дивись схему
трьохкомпонентних аеродинамічних ваг кафедри);
l – повздовжня перемінна база, яка залежить від розмірів
моделі крила;
α – кут атаки крила.
Сила лобового опору моделі крила визначається за формулою:
Х мод. = Х зам. – Х підв . ,
де: Х зам. – показник вагового елементу Х при замірюванні сили
опору моделі;
Х підв . – лобовий опір підвіски при відповідних швидкостях
потоку.
До величини сили лобового опору моделі крила Х мод входить не
тільки сила лобового опору утримуючого пристрою, але і приріст
сили лобового опору крила, обумовленого впливом утримуючого
пристрою на потік, у якому знаходиться крило. Графік додатку 4, що
являє собою залежність сили лобового опору утримуючого пристрою
від швидкості, яка включає і приріст лобового опору крила,
обумовлений наявністю інтерференції.
По отриманим значенням підйомної сили, сили лобового опору
визначаємо коефіцієнти С у , С х , К:
(P − P ) + c2 (P2 − P20 ) ;
Y
= 1 10
2
SρV
S (a − a0 ) cµ
2
Cy
X
X − X підв
K=
Cχ = мод2 = зам
Cx
S (a − a0 )cµ
SρV
2
Cy =
84
85.
Порядок виконання роботи та обробка результатівексперименту
Для проведення експерименту необхідно чотири чоловіка – для
одночасного зняття показників на вагових елементах Р 1 , Р 2 Х, а
також для відліку показників мікроманометру, за допомогою якого
визначається швидкісний напір
ρV 2
2
.
Внаслідок впливу критеріїв Re та М на аеродинамічні коефіцієнти
в роботі необхідно визначити число Рейнольдса:
Re =
Vb
,
ν
де: V – швидкість незбуреного потоку;
b – хорда крила;
ν – коефіцієнт кінематичної густини повітря.
Для визначення швидкості незбуреного потоку використаємо
значення швидкісного напору:
V=
2 (a − a0 ) c µ
ρ
.
Щільність ρ та коефіцієнт кінематичної густини ν знаходимо по
графікам, які наведені у додатках, в залежності від температури та
тиску повітря навколишнього середовища.
При побудові поляри крила масштаб коефіцієнту опору С х
збільшують у п’ять (а інколи в десять) разів порівняно з масштабом
коефіцієнту підйомної сили С у .
Для проведення експерименту крило підвішується знизу до
аеродинамічних ваг. Для виміру швидкості набігаючого потоку на
робочій ділянці труби розміщується приймач повітряного тиску, який
поєднано з мікроманометром.
Перед виконанням експерименту крило балансується на вагах за
допомогою гир і встановлюється під кутом атаки, який відповідає
куту атаки нульової підйомної сили. Вмикається двигун труби. Кут
атаки крила послідовно збільшують на величину, яка вказується
викладачем. Для кожного кута атаки знімають показання ваг та
мікроманометру. Кути атаки збільшують до тих пір, доки підйомна
85
86.
сила не почне зменшуватись. У такій же послідовності виконуютьексперимент по визначенню сумарних аеродинамічних характеристик
стрілоподібного крила. В залежності від часу, відведеного на
проведення лабораторної роботи, експериментальні дані щодо
стрілоподібного крила можуть надатися викладачем у готовому
вигляді (попередньо оброблені)
Після продувки крил дані експерименту обробляються і
розраховуються коефіцієнти С у , С х та аеродинамічна якість крила К.
За даними виконаного експерименту будуються графіки залежностей
С у =f(α), С х =f(α), К=f(α), С у =f(С х ) для прямокутного та
стрілоподібного крил, якісний вигляд яких надано на рис.1.
Су
Cx
1.2
0.12
0.8
0.08
0.4
0.04
0
60
12
18
24
α
К
Су
15
1.2
10
0.8
0
120
α
180
αкр
100
50
5
60
10
0.4
150
0
150
50
0
60
120
180
α
0
0.1
0.2
Рис. 1. Сумарні аеродинамічні характеристики крил
86
Сх
87.
Питання для самоконтролю1. Напишіть формули для визначення коефіцієнтів підйомної сили та
сили лобового опору.
2. Наведіть графік залежності С у =f(α) для крила із симетричним та
несиметричним профілем.
3. Наведіть та поясніть залежності С у =f(α) для крил прямокутної та
стрілоподібної форм.
4. Визначте значення C αy для прямокутного та стрілоподібного крил
по графіку С у =f(α).
5. Визначити α кр . для прямокутного та стрілоподібного крил.
6. Визначте на залежності С х =f(α) для вказаного кута атаки значення
С х0 та С хі .
7. Напишіть рівняння поляри крила.
8. Вкажіть характерні точки на полярі крила.
9. Наведіть графік поляри крила.
10. Чим визначається аеродинамічна якість крила ?
11. Зобразити графік К max =f(α), покажіть характерні точки.
12. Чим визначається максимальна аеродинамічна якість крила ?
13. Як визначити К max по полярі крила ?
14. Як визначити коефіцієнт А , використовуючи поляру крила ?
15. Як впливає стрілоподібність крила на C αy ?
87
88.
ЛАБОРАТОРНА РОБОТА 10.ВПЛИВ ПОДОВЖЕННЯ КРИЛА НА ЙОГО
АЕРОДИНАМІЧНІ ХАРАКТЕРИСТИКИ
Мета роботи – визначити аеродинамічні коефіцієнти крил з
різними подовженнями;
– оцінити вплив подовження крил на їх аеродинамічні
характеристики.
Основні теоретичні положення
Подовження крила відноситься до одних з основних його
геометричних характерстик і визначається відношенням квадрату
розмаху l2 до площі S :
λ= l2/ S
(1)
Подовження крила суттєво впливає на його індуктивний опір,
підйомну силу, а значить і на аеродинамічну якість.
Сутність цього впливу полягає в
тому,
що
внаслідок
кінцевих
перетікань
повітряного
потоку
утворюються кінцеві вихори (рис. 1,
3), які генерують індуктивні швидкості
V i (рис. 3) і які змінюють кут атаки на
величину кута скосу ε, що в свою
чергу призводить до відхилення
вектора підйомної сили Y та утворення
сили індуктивного опору Х і (рис. 4).
Таким чином – підйомна сила
зменшується, а сила лобового опору
збільшується на величину сили
Рис. 1. Утворення кінцевих
індуктивного опору.
вихорів при обтіканні
Теорія дає наступний зв'язок між
прямокутного крила
скосом
потоку
ε,
коефіцієнтом
(візуалізація потоку в
підйомної
сили
С
у та подовженням
гідродинамічній трубі)
крила λ:
88
89.
ε=
C y2
πλ
(1 + τ ) ,
=
Cx
(2)
i
C y2
πλ
(1 + δ ) ,
(3)
де: С хі – коефіцієнт сили індуктивного опору;
τ, δ – поправочні коефіцієнти, які залежать від форми крила в
плані та його подовження (рис. 2).
τ, δ
0,2
τ
0,1
δ
0
2
4
6
8
λ
Рис. 2. Залежності τ=f(λ), δ=f(λ) для крил прямокутної форми в плані
Таким чином, повний коефіцієнт сили лобового опору на
дозвукових швидкостях буде визначатись як
С х = С х0 + С хі ,
(4)
де: С х0 – коефіцієнт сили профільного опору.
Вигляд по А (рис.4)
Vіст
Кінцеві вихори
Vi
Крило кінцевого
розмаху (вигляд з заду)
ε
Vi
Vi
V∞
Vi
V∞
Vіст.
ε
Vi
Індуктивні Vi
швидкості
Рис. 3. Утворення скосів потоку ε на крилі кінцевого розмаху, яке
знаходиться під кутом атаки
89
90.
Оскільки профільний опір крил, які мають однаковий профіль прирізних подовженнях, суттєво не змінюється, то можна вважати, що
зміна подовження впливає лише на величину сили індуктивного
опору. Формули 2, 3, 4 дозволяють виконати перерахунок
характеристик крила з одного подовження на інше, якщо для будь–
якого подовження ці характеристики відомі. Формули перерахунку
можна отримати, користуючись наступними міркуваннями. Якщо
істинні кути атаки α іст двох крил з однаковим профілем, але різного
подовження, дорівнюють одне одному, то будуть дорівнювати одне
одному коефіцієнти підйомної сили с у , а також коефіцієнти
профільного опору с х0 . Так як скоси потоку неоднакові, то
геометричні кути α та коефіцієнти індуктивного опору С хі будуть
відрізнятися одне від одного. Позначаючи параметри крила з
подовженням λ 1 через α 1 , С хі1 , а параметри крила з подовженням λ 2
через α 2 , С хі2 , можна записати:
Yіст.
Y
Істиний кут атаки
α
αіст.
ε
Хi
V∞
_
V∞
ε
Vіст.
Кінцевий вихор
Рис. 4. Утворення сили індуктивного опору Хі
при наявності скосу потоку на крилі кінцевого розмаху
α іст1 = α1 − ε1 = α1 −
α іст 2 = α 2 − ε 2 = α 2 −
90
С y2
πλ1
(1 + τ1 ) ;
С y2
πλ 2
(1 + τ 2 )
Vi
А
91.
Сx = Cx1
Сx = Cx
2
Оскільки:
то
0
0
1
2
+ Cx
+ Cx
i1
i2
= Cx
= Cx
01
0
+
+
2
C y2
π λ1
C y2
π λ2
(1 + δ1 ) ;
(1 + δ 2 ) ;
С х 0 1 = С х 0 2 ; α іст 1 = α іст 2 ,
α1 −
С y2
(1 + τ1 ) = α 2 −
С y2
(1 + τ 2 ) ;
πλ1
πλ2
C2
C2
С x − y (1 + δ1 ) = С x − y (1 + δ 2 );
1
2
π λ1
π λ2
Звідціля отримаємо формули перерахунку:
C y2 1 + τ1 1 + τ 2
α1 =
α2 +
−
;
π λ1
λ2
C y2 1 + δ1 1 + δ 2
−
Cx =
Cx +
.
1
2
π λ1
λ2
(5)
(6)
Слід пам’ятати, що у формулі (5) кути α 1 та α 2 надані у радіанах.
Щоб перейти до градусної міри необхідно добуток при
с2 у
домножити на 57.3, тобто
C y2 1 + τ1 1 + τ 2
α1 =
α + 57,3
−
.
2
π λ1
λ2
0
0
0
(7)
Порядок виконання роботи та обробка результатів
експерименту
Моделі крил різних подовжень (λ 1 =3, λ 2 =5, λ 3 =6) розміщують
на утримуючому пристрої в робочій частині аеродинамічної труби і
по черзі продувають в діапазоні льотних кутів атаки. При цьому для
кожної моделі на кожному куті атаки вимірюється підйомна сила
Y = Y′ – Y 0
(8)
та сила лобового опору
Х = Х повне – Х утр. пр
(9)
91
92.
де: Х утр. пр – сила лобового опору утримуючого пристрою(державки), визначається по графіку додатка 4 в залежності від
швидкості незбуреного потоку.
За даними значень Y та Х визначаються відповідні коефіцієнти
аеродинамічних сил:
Cy =
Y
ρV 2
S
2
(10);
Cx =
X
ρV 2
S
2
(11),
та будуються графіки С у = f (α, λ) , С х = f (С у , λ) (рис. 5, 6).
Динамічний тиск визначається за показаннями приймача повного
тиску, тоді:
cx
=
1
X
⋅
( a − a0 )∞ [ K ⋅ µ ⋅ S ⋅ g ]
;
1
Y
.
cy
=
⋅
( a − a0 )∞ [ K ⋅ µ ⋅ S ⋅ b ⋅ g ]
(12)
де: (а – а 0 ) – показання мікроманометра; К, μ – постійні
мікроманометра та приймача повного тиску.
Наступним етапом необхідно за формулами (5) та (6) виконати
перерахунок характеристик. В якості вихідних даних необхідно взяти
характеристики крила з подовженням λ = 3.
92
93.
Су1.2
λ=6
λ=5
0.8
λ=3
0.4
α0
0
4
8
12
16
– 0.4
Рис. 5. Графік залежності Су= f (α) для крил з різними видовженнями
Су
1.2
λ=6
λ=5
0.8
0.4
λ=3
Cx
0
0.2
– 0.4
Рис. 6. Поляри прямокутних крил з різними подовженнями
Перераховані точки нанести на графіки відповідних залежностей
(рис. 5, 6).
Всі розрахунки виконуються у табличній формі
відповіно
протоколу лабораторної роботи.
93
94.
Питання для самоконтролю1. Чим визначається подовження крила ?
2. Дайте визначення кута атаки крила.
3. Що таке скіс потоку ?
4. Що є причиною утворення індуктивних швидкостей ?
5. Як впливає скіс потоку на величину підйомної сили та сили
лобового опору ?
6. В чому причина утворення індуктивної сили лобового опору ?
7. Назвіть складові сили лобового опору крила.
8. Як впливає подовження крила на силу лобового опору та її
складові ?
9. Зобразіть графік залежності С у = f (α) для прямокутних крил з
різним подовженням.
10. Розкажіть послідовність виконання лабораторної роботи.
94
95.
ЛАБОРАТОРНА РОБОТА 11.ВИЗНАЧЕННЯ АЕРОДИНАМІЧНИХ ХАРАКТЕРИСТИК
КОРПУСІВ
Мета роботи – розкрити фізичну сутність утворення
аеродинамічних сил на корпусі(фюзеляжі) літака;
– отримати експериментальним шляхом залежності коефіцієнтів
С у =f(α); С х =f(α); С х =f(М) моделі корпусу літака. Отримані результати
порівняти з розрахунковими;
– засвоїти методику визначення та розрахунку основних
аеродинамічних характеристик корпусів літаків.
Основні теоретичні положення
На корпус, який знаходиться в повітряному потоці під кутом атаки
α, діє аеродинамічна сила R, проекції якої на осі швидкісної системи
координат являють собою підйомну силу Y та силу лобового опору Х
(рис. 1).
Коефіцієнт підйомної сили корпусу
Cy =
Y
ρV 2
SM
2
(1)
визначається силами тиску, які діють на головну, хвостову та
циліндричну частини. Підйомна сила головної та хвостової частин
обумовлена потенційним обтіканням корпуса у вигляді тіла обертання
і лінійно залежить від кута атаки. Підйомна сила циліндричної
частини обумовлена відривом потоку на верхній поверхні корпусу(
фактично – це сила опору циліндричного тіла, яке обтикається
в’язким поперечним потоком із швидкістю Vsin α, нелінійно залежить
від кута атаки).
Загальний коефіцієнт підйомної сили корпусу у вигляді тіла
обертання можна надати як суму лінійної та нелінійної по куту атаки
складових
С у = С у лін + С у нл
(2)
95
96.
AVcosα
α
Vsinα
V
Y
R
α
X
V
A
A −A
Yвідр
Vsinα
Рис. 1. Схема обтікання корпусу дозвуковим потоком
Аеродинаміка тіл обертання дає наступні залежності для С у л та С у
нл :
C y л = 2a
Sд
,
Sм
де: α – кут атаки тіла обертання (у радіанах);
S д – площа донного зрізу;
S м – площа міделевого перерізу.
96
(3)
97.
Cy = c4
(λ ц + λ хв )sin 2 α ,
π
(4)
де: с – коефіцієнт, який залежить від числа Re тіла обтікання
( Re =
VDм
), с=0.35 при Re>1.105;
ν
λ ц , λ хв – подовження хвостової та циліндричної частин корпусу.
Вираз (2) з урахуванням виразів (3), (4) запишеться у вигляді:
C y = 2α
Sд
4
+ c (λ ц + λ хв )sin 2 α
Sм
π
(5)
Коефіцієнт лобового опору корпусу розраховується за відомою
формулою
Cx =
X
ρV 2
SM
2
(6)
і визначається силами тиску, які діють на головну та хвостову
частини, розрідженням за донним зрізом і силами тертя. Загальний
коефіцієнт лобового опору корпусу С х (як і крила) надається у вигляді
суми коефіцієнтів лобового опору, один з яких не залежить від
підйомної сили – С х0 , і другий, який залежить від підйомної сили – С хі
:
С х = С х0 + С хі . (7)
Якщо при дозвукових швидкостях польоту коефіцієнт С х0
визначається в основному силами тертя(С х тертя ), то при біля звуковій
та надзвуковій швидкостях опір тиску складає більшу долю усього
опору (за рахунок хвильового опору). Хвильовий опір(С х хв ) в значній
мірі залежить від форми головної частини. Це дозволяє записати
наступні співвідношення для коефіцієнтів С х0 корпусу при дозвуковій
та надзвуковій швидкостях:
С х0 = С х тиску + С х тертя
(M ≤M кр ) ;
(8)
С х0 = С х хв + С х тертя
(M >M кр ) .
(9)
Порядок виконання роботи та обробка результатів
експерименту
97
98.
Модель корпусу літального апарату, яка виконана у вигляді тілаобертання, встановлюється в робочій частині аеродинамічної
труби(рис. 2). На заданому куті атаки α та при заданій швидкості
потоку V. Кути атаки корпусу можуть поступово змінюватись за
рахунок спеціального пристрою. Величини аеродинамічних сил Y та Х
урівноважуються аеродинамічними вагами і значення цих сил
знімаються у ході експерименту.
Стренги утримуючого пристрою
V
α
X
R
Y
Модель
корпусу
Робоча частина
Рис. 2. Схема розміщення моделі корпусу в АДТ
При наявності надзвукової аеродинамічної труби знімаються
значення коефіцієнту С х0 моделі корпусу(виконаного спеціально для
експерименту в надзвуковій трубі) при числах М>1.
Визначення коефіцієнтів С у та С х моделі корпусу провести в
діапазоні кутів атаки 0…400 з інтервалом у 50. Значення коефіцієнтів
для кожного кута атаки розраховується за співвідношеннями:
Cy =
Y
ρV
SM
2
2
98
=
Y ′ − Y0
,
(a − a0 )KS M
(10)
99.
Cx =X
ρV
SM
2
2
=
X ′ − (X 0 + X утр пр )
(a − a0 )KS M
,
(11)
де: Y′ − поточне значення заміряної величини підйомної сили на
заданому куті атаки;
Y 0 – показання ваг при виставлені моделі на кут атаки α = 0;
S М – площа міделевого перетину корпусу;
(а – а 0 ) –
величина рівня рідини у нахильній трубці
мікроманометра;
Х утр. пр . – сила опору утримуючого пристрою аеродинамічних
ваг(в залежності від швидкості потоку, визначається за графіком,
додаток 4).
V – швидкість повітряного потоку в АДТ, утримується
постійною.
Використовуючи формули (3), (4) розрахувати теоретичні
значення лінійної та нелінійної складових коефіцієнта підйомної сили
для кутів атаки, на яких замірювались сили У, Х в експерименті.
При наявності надзвукової аеродинамічної труби визначити силу
Х 0 і відповідно коефіцієнт С х0 моделі корпусу для чисел М = 1,5; 2,2;
2,5.
За отриманими в ході експерименту значенням коефіцієнтів С у та
С х для дозвукових швидкостей побудувати графіки залежностей
С у =f(α); С х =f(α), якісний вигляд яких надано на рис. 3, 4. Звернути
увагу на нелінійний характер залежності С у =f(α) (починаючи з
α ≈ 100). На цей же графік нанести розраховані за формулами (3), (4)
залежності лінійної та нелінійної складових коефіцієнта С у .
Порівняти теоретичну та експериментальну залежності С у =f(α).
99
100.
Cy0.6
Су нл
експеримент
0.4
Су л
0.2
0
10
20
30
α0
Рис. 3. Графік залежності Су=f(α) корпусу
На графіку С х =f(α). показати профільну С х0 та індуктивну С хі
складові.
Cх
0.6
0.4
Cхі
0.2
Cх0
0
10
20
30
α0
Рис. 4. Графік залежності Сх=f(α) корпусу
По отриманим у ході експерименту значенням коефіцієнту С х0 для
дозвукової та надзвукової(при наявності) швидкостей побудувати
графік залежності С х0 = f(M), якісний вигляд якої надано на рис. 5.
Оцінити, у скільки разів коефіцієнт С х0 більше на надзвукових
100
101.
швидкостях ніж на дозвукових (при наявності експерименту внадзвуковій АДТ).
Cх0
0.6
0.4
0.2
0
0.5
1.0
1.5
М
Рис. 5. Графік залежності С х0 = f(M) корпусу
За результатами порівнянь зробити висновки (що є головною
причиною збільшення С х0 при переході на надзвукові швидкості).
Питання для самоконтролю
1. Назвіть основні геометричні характеристики корпусів.
2. Поясніть фізичну сутність утворення лобового опору тіла
обертання при обтіканні його повітряним потоком з дозвуковою
швидкістю.
3. Поясніть фізичну сутність утворення донного опору.
4. Поясніть, як утворюється підйомна сила тіла обертання при
дозвуковій швидкості.
5. Напишіть та поясніть теоретичний вираз лінійної складової
коефіцієнта С у .
6. Напишіть та поясніть теоретичний вираз нелінійної складової
коефіцієнта С у .
7. Зобразіть та поясніть графік залежності С у =f(α) корпусу у
вигляді тіла обертання
8. Зобразіть та поясніть графік залежності С х =f(α) корпусу у
вигляді тіла обертання.
101
102.
9. Як впливає форма головної частини корпусу на лобовий опір ?10. Розкажіть порядок виконання лабораторної роботи.
11. Напишіть формулу для визначення коефіцієнту підйомної сили
в експерименті.
12. Напишіть формулу для визначення коефіцієнту сили лобового
опору в експерименті.
102
103.
ЛАБОРАТОРНА РОБОТА 12.ВИЗНАЧЕННЯ АЕРОДИНАМІЧНИХ ХАРАКТЕРИСТИК
ЛІТАКА
Мета роботи – закріпити знання основних теоретичних положень
стосовно аеродинамічної компоновки літаків, а також про підйомну
силу та силу лобового опору літака з урахуванням інтерференції;
– отримати ваговим методом залежності коефіцієнтів С у =f(α),
С х =f(α),
С х =f(С у ), К= f(α) моделі літака та порівняти їх із
аналогічними характеристиками, отриманих для моделі крила.
Основні теоретичні положення
Аеродинамічні характеристики літака не являють собою просту
суму відповідних аеродинамічних характеристик його основних
частин – крила, фюзеляжу, оперення та ін. внаслідок взаємного
впливу (інтерференції) одне на одне цих частин. У зв’язку із цим при
розрахунку аеродинамічних характеристик літака в цілому вводять
спеціальні коефіцієнти інтерференції, які враховують взаємний вплив
його частин. Особливість чисельних методів при обчислені
аеродинамічних характеристик літака полягає у складності
визначення цих коефіцієнтів. Важливою перевагою фізичного
експерименту є те, що при ваговому експерименті в аеродинамічній
трубі ці коефіцієнти окремо визначати не слід – вони "автоматично"
враховуються повітряним потоком при обтіканні моделі літака.
Знаючи за даними експерименту підйомну силу Y та силу лобового
опору X моделі літака, коефіцієнти цих сил визначаються як:
Cy =
Cx =
X
Y
=
Y ′ − Y0
(a − a0 )cS M
ρV
SM
2
X ′ − (X 0 + X утр пр )
=
(a − a0 )cS M
2
ρV 2
SM
2
103
(1)
(2)
104.
K=Cy
Cx
,
(3)
де Y′ та Х′ – поточні показання ваг при вимірюванні підйомної
сили та сили лобового опору моделі літака;
Y 0 та Х 0 – показання ваг при нульовому значенні кута атаки та
урахуванні ваги моделі літака;
S – площа крила моделі літака;
с – постійна мікроманометру та приймача повітряного тиску;
(а–а 0 ) – поточне та нульове показання мікроманометру.
Порядок виконання роботи та обробка результатів
експерименту
На заданому куті атаки α та при заданій швидкості V на модель
буде діяти повна аеродинамічна сила R, проекції якої на вісі
швидкісної системи координат (підйомна сила та сила лобового
опору) урівноважуються на аеродинамічних вагах.
Для визначення швидкості незбуреного потоку використаємо
значення швидкісного напору:
V=
2(a − a0 )cµ
.
ρ
Щільність ρ знаходимо по графікам, які наведені у додатках, в
залежності від температури та тиску повітря навколишнього
середовища.
Для проведення експерименту модель літака на утримуючому
пристрої підвішується знизу до аеродинамічних ваг (рис. 1). Для
виміру швидкості набігаючого потоку на робочій ділянці труби
розміщується приймач повітряного тиску, який поєднано з
мікроманометром.
Перед виконанням експерименту модель балансується на вагах за
допомогою гир і встановлюється під кутом атаки, який відповідає
куту атаки нульової підйомної сили. Вмикається двигун труби. Кут
атаки крила послідовно збільшують на величину, яка вказується
викладачем (приблизно через 30…50) знімають показання ваг (Y′ та Х′)
та мікроманометру. Кути атаки збільшують до тих пір, доки підйомна
сила не почне зменшуватись.
104
105.
Робоча частинаМодель літака на
утримуючому пристрої
V∞
Мікроманометр
Рис. 1. Схема розміщення моделі літака в робочій частині аеродинамічної
труби для проведення вагового експерименту по визначенню підйомної сили
та сили лобового опору при різних кутах атаки
Після продувки моделі
дані експерименту обробляються і
розраховуються коефіцієнти С у , С х за формулами 1, 2 та
аеродинамічна якість крила К(формула 3) для всіх кутів атаки. За
даними виконаного експерименту будуються графіки залежностей
С у =f(α), С х =f(α), К=f(α), С у =f(С х ), якісний вигляд яких надано на рис.
2, 3, 4, 5.
Су
1.2
0.8
0.4
0
6
12
18
24
α,
Рис. 2. Графік залежності Су= f(α) моделі літака.
105
106.
При побудові поляри крила масштаб коефіцієнту опору С хзбільшують у п’ять (а інколи в десять) разів порівняно з масштабом
коефіцієнту підйомної сили С у .
Cx
0.12
0.08
0.04
0
6
12
18
α, град
Рис. 3. Графік залежності Сх=f(α).
К
15
10
5
0
6
12
18
α, град
Рис. 4. Графік залежності К=f(α).
106
107.
Су1.2
120
0.8
60
0.4
0
90
30
0.1
0.2
Сх
Рис. 5. Поляра моделі літака.
Питання для самоконтролю
1. Дайте визначення аеродинамічної компоновки літака.
2. Назвіть вимоги до аеродинамічної компоновки літака.
3. Напишіть формули для визначення коефіцієнтів підйомної сили та
сили лобового опору літака.
4. Дайте визначення кута атаки літака.
5. Що таке інтерференція частин літака ?
6. В чому суть інтерференції крила і фюзеляжу, крила і
горизонтального оперення ?
7. Написати та пояснити формулу для визначення коефіцієнта
підйомної сили літака з урахуванням інтерференції.
8. Зобразити та пояснити залежність С у =f(α) для літака, вказати
характерні точки.
9. Зобразити та пояснити залежність С х =f(α) для літака, вказати
характерні точки.
10. Зобразити та пояснити залежність К=f(α) для літака, вказати
характерні точки.
11. Зобразити та пояснити графік поляри для літака.
12. Визначить по полярі літака значення коефіцієнтів С х0 , С хі ,
величину коефіцієнта А.
13. Напишіть рівняння поляри літака у діапазоні безвідривного
обтікання.
107
108.
14. Назвіть шляхи підвищення аеродинамічної якості при створенісучасних транспортних літаків.
108
109.
ЛАБОРАТОРНА РОБОТА 13.ВИЗНАЧЕННЯ АЕРОДИНАМІЧНИХ ХАРАКТЕРИСТИК
МЕХАНІЗОВАНОГО КРИЛА
Мета роботи – показати необхідність застосування механізації
крила, розкрити фізичну сутність утворення додаткової підйомної
сили на механізованому крилі;
– закріпити знання основних теоретичних положень стосовно
механізованого крила;
– визначити основні аеродинамічні характеристики моделі крила
із щілинним закрилком, для чого у ході експерименту отримати
залежності С у =f(α, δ з ), С у =f(С х , δ з ), К max =f(δ з ), провести
порівняльний аналіз із характеристиками крила без механізації.
Основні теоретичні положення
Швидкість літака в момент відриву або торкання при посадці
злітно-посадкової смуги визначається формулою:
Vвідр =
( S)
2G
відр
C y пос ρ 0
, Vпос =
( S)
2G
пос
C y пос ρ 0
(1)
де: V відр , V пос – швидкості відриву та посадки літака;
G – вага літака у момент відриву та посадки відповідно;
S – площа крила;
С у відр , С у пос , – коефіцієнти підйомної сили літака при зльоті та
посадці відповідно(визначаються, в основному, крилом);
ρ 0 – щільність повітря на аеродромі зльоту або посадки
(залежить від атмосферного тиску, висоти аеродрому над рівнем
моря, температури повітря під час зльоту чи посадки).
Механізація задньої кромки крила у вигляді закрилків та щитків
призначена для збільшення коефіцієнту підйомної сили крила С у на
режимах зльоту та посадки, а завдяки цьому, – збільшенню підйомної
сили крила(літака).
109
110.
При відхилені закрилків змінюється кривизна профілю, змінюєтьсякартина його обтікання за рахунок збільшення розрідження над
верхньою поверхнею (рис. 1) та зростанням тиску під крилом,
збільшується кут атаки крила на +Δα за рахунок зміни положення
хорди при відхилені закрилків (рис. 2). На важких літаках, де
застосовуються дво- та трищілинні висувні закрилки, при їх випуску
збільшується також і площа крила. Все це приводить до того, що
підйомна сила крила з відхиленим закрилком при одному й тому ж
куті атаки збільшиться.
1
2
V∞
Рис. 1. Вплив відхилення закрилку на векторну
діаграму розподілу тиску по верхній поверхні
профілю: 1 – при не відхиленому закрилку; 2 – при
відхиленому закрилку
Положення хорди крила
при прибраних закрилках
+ Δα
V∞
Положення хорди крила
при випущених закрилках
Рис. 2. Збільшення кута атаки крила при
випущених закрилках
Однак при відхилені простого закрилка на кути δ з ≈150…200
виникає зрив потоку з його поверхні. у зв’язку з цим найшли
застосування щілинні, двощілинні та багатощілинні закрилки, у яких
через спеціально сформовані профільовані щілини здійснюється
110
111.
здування примежового шару, що відірвався від верхньої поверхні(рис. 3). Завдяки цьому зрив потоку з закрилка стримується,
припустимі кути відхилення закрилка збільшуються, зростає за
рахунок цього і приріст підйомної сили на крилі.
Застосування двощілинних висувних закрилків (рис. 2) дозволяє
відтягнути відрив потоку до кутів δ з ≈ 500…600. в наслідок цього
ефективність механізації суттєво зростає.
1
у
V∞
2
Рис. 3. Розподіл швидкостей у примежовому шарі:
1 – без наявності профільованої щілини;
2 – при наявності профільованої щілини між
крилом та закрилком
Відхилення закрилків на великі кути викликає відрив потоку з
передньої кромки крила, що значно зменшує його критичні кути
атаки. Для запобігання цьому використовується механізація передньої
кромки крила –носки, що відхиляються або передкрилки.
При відхилені передкрилка утворюється також профільована
щілина(рис. 4), завдяки чому потік, проходячи крізь неї,
прискорюється, збільшується кінетична енергія примежового шару,
що сприяє затягуванню його відриву на більші кути атаки.
111
112.
Рис. 4. Крило з двощілинним закрилком тапередкрилком.
Порядок виконання роботи та обробка результатів
експерименту
Визначення аеродинамічних характеристик механізованого крила
виконується методом вагових випробувань на двох моделях:
– моделі крила без механізації;
– моделі крила з двощілинним висувним закрилком.
Досліджувані крила не мають геометричної та аеродинамічного
кручення, виконані з однаковим профілем. Для проведення роботи
моделі по черзі встановлюються у робочій частині аеродинамічної
труби на спеціальному утримуючому пристрої двохкомпонентних ваг.
Кути атаки моделі крила встановлюється за допомогою механізму
кута атаки. Спочатку продувається модель крила без механізації, кути
атаки встановлюються з інтервалом у 20 або 40. Після цього
продувається модель крила з двощілинним закрилком – спочатку при
куті відхилення закрилка 200, наступна продувка – з кутом відхилення
закрилка 400.
Під час проведення експерименту швидкість повітряного потоку у
робочій частині аеродинамічної труби підтримується постійною і
контролюється показаннями мікроманометра.
По отриманим для кожного кута атаки значенням підйомної сили
та сили лобового опору необхідно розрахувати відповідні коефіцієнти
– С у та С х .
112
113.
У відповідності із показаннями мікроманометра коефіцієнтирозраховуються за формулами:
Y
Y
=
2
(a − a0 )KµS
ρV
S
2
X
X
=
Cx =
2
(a − a0 )KµS
ρV
S
2
Cy =
(2)
(3)
де: Y = (Y′ – Y 0 ) – значення підйомної сили (Y′ – поточні покази
ваг, Y 0 – покази ваг при урівноваженні сили тяжіння моделі крила та
нульовому куті атаки );
(а– а 0 )К μ= q – динамічний тиск у показниках мікроманометру
(а– а 0 )– поточні показання мікроманометру, К – коефіцієнт
мікроманометру, μ – коефіцієнт поля динамічних тисків);
S – площа моделі крила.
Х = (Х′ – Х 0 ) – значення сили лобового опору (Х′– поточні
покази ваг; Х 0
– показання ваг при урівноваженні сили тяжіння
моделі крила та нульовому куті атаки).
По розрахованим значенням коефіцієнтів С у та С х побудувати
залежності С у = f(α, δ з ) та С у = f(С х , δ з ) для двох моделей крила (рис. 5,
6).
Використовуючи залежності С у = f(α, δ з ), визначити приріст ΔС у
моделі крила із двощілинним закрилком для кутів відхилення
закрилків δ з =0, 200, 400 при нульовому куті атаки та побудувати
графік залежності ΔС у = f(δ з ) (рис. 7)
За побудованими полярами крила (рис. 6) визначити
графоаналітичним способом значення максимальної аеродинамічної
якості К max моделі крила із щілинним закрилком при δ з = 0, 200, 400 та
побудувати графік залежності К max =f(δ з ) (рис. 8).
113
114.
Суδз = 400
δз = 200
1.2
δз = 0
0.8
0.4
0
40
120
80
160
α, град
Рис. 5. Графік залежності коефіцієнта підйомної сили крила від кутів
атаки при різних кутах відхилення закрилків
Отримані залежності проаналізувати, звернувши увагу на приріст
коефіцієнтів С у , С х , К max та критичного кута атаки α кр при різних
кутах відхилення закрилків.
114
115.
Су1.2
δз = 20
δз = 0
δз = 400
0
0.8
0.4
0
0.4
0.2
Сх
0.6
Рис. 6. Поляри крила при різних кутах відхилення закрилків
ΔСу
Кmax
0.5
5
0
200
400 δз , град 0
Рис. 7. Графік залежності
ΔСу= f(δз)
200
400 δз , град
Рис. 8. Графік залежності
Кmax= f(δз)
115
116.
Питання для самоконтролю1. З якою метою застосовується механізація задньої кромки крила ?
2. З якою метою застосовується механізація передньої кромки крила ?
3. Назвіть основні види механізації крила.
4. Як впливає відхилення закрилку на залежність С у =f(α )?
5. Поясніть характер розподілу тиску по поверхні крила при δз=0 та
δз =400.
6. Як впливає відхилення простого закрилку на похідну C αy крила ?
7. Чому при зльоті літака закрилки відхиляються на менший (або
рівний) кут, ніж при посадці ?
8. В чому перевага щільового закрилку перед простим закрилком ?
9. З якою метою застосовується механізація передньої кромки крила ?
10.
Як впливає відхилення механізації крила на аеродинамічну
якість літака ?
116
117.
ЛАБОРАТОРНА РОБОТА 14.ВИЗНАЧЕННЯ ПОВЗДОВЖНЬОГО МОМЕНТУ ЛІТАКА
Мета роботи – закріпити знання основних теоретичних положень
щодо утворення повздовжнього моменту при зміні кута атаки;
– розкрити фізичну сутність впливу положення центру ваги на
повздовжній момент літака;
– закріпити знання основних теоретичних положень щодо
аеродинамічного фокуса літака;
– отримати експериментально та проаналізувати залежності
m z =f(α)для різних центрівок моделі літака, визначити ступені
C
повздовжньої статичної стійкості mz y та координати фокуса X F для
цих центрівок.
Основні теоретичні положення
Визначення моментів, які діють на літак здійснюється у зв’язаній
системі координат Ох 1 у 1 z 1 , початок якої міститься у центрі тяжіння
(позначається ЦТ або Т) літака т.0 (рис 1). Осі зв’язаної системи
координат: Ох 1 – повздовжня(співпадає з повздовжньою віссю
літака), Оу 1 – нормальна (перпендикулярна до Ох 1 і лежить у площі
симетрії літака), Оz 1 – поперечна (перпендикулярна до площі Ох 1 у 1 і
спрямована вздовж правого пів крила).
Проекції результуючого
моменту М, який діє на літак, на осі зв’язаної системи координат
називаються: М х – момент крену, М у – момент рискання(або момент
курсовий), М z – момент тангажа, причому позитивний –
кабріруючий, негативний – пікіруючий. Оскільки моменти
визначаються тільки у зв’язаній системі координат, то індекс "1" біля
індексу осі у позначені моменту не ставиться. Рух літака вздовж осей
Ох 1 , Оу 1 (у площі Ох 1 у 1 ) та обертання навколо осі Оz 1 – зветься
повздовжнім рухом(або рух у повздовжньому каналі). Звідси ще одна
назва моменту тангажу – повздовжній момент. Рух літака вздовж осі
Оz 1 та обертання навколо осей Ох 1 та Оу 1 зветься боковим рухом
(боковий канал).
117
118.
у1My
0
Mx
х1
Mz
z1
Рис. 1. Схема моментів, діючих на літак
Взагалі, якщо розглядати природу утворення, на літак можуть
діяти наступні моменти: моменти, які пов’язані із зміною кутів атаки
та ковзання, керуючі(управляючі) моменти, демпфіруючи моменти,
спіральні моменти, гіроскопічні моменти.
Повздовжній момент визначається виразом:
M z = mz
ρV 2
2
S ba ,
(1)
де: m z – коефіцієнт повздовжнього моменту;
b a – середня аеродинамічна хорда крила.
Величина коефіцієнту повздовжнього моменту, який діє на літак
відносно центру ваги, залежить від коефіцієнта підйомної сили С у
(або кута атаки) та від різниці відносних координат фокуса X
і
F
центра ваги X T . Зазвичай ця залежність надається у вигляді:
=
mz mz 0 − C y ( X F − X T )
,
(2)
де: m z0 – коефіцієнт повздовжнього моменту при нульовій
підйомній силі.
Залежність коефіцієнта m z від кута атаки α характеризує
повздовжню статичну стійкість літака(рис. 2). Якщо похідна
118
119.
αdmz
dmz
=0 –
< 0 , то літак вважається статично стійким, якщо
dα
dα
dmz
літак статично нейтральний, якщо dα > 0 , літак статично нестійкий.
mz ≈
mz
Δmz > 0
не стійкий
0
Δα > 0
α
Δmz < 0
нейтральний
стійкий
Рис. 2. Графік залежності коефіцієнту повздовжнього моменту mz
від кута атаки α (для стійкого з ділянками нейтральності та
нестійкості та нестійкого літаків)
Дійсно, якщо на статично стійкий літак буде діяти зовнішнє
збурення, наприклад, збільшення кута атаки на Δα (за рахунок
вертикального пориву вітру), то виникне приріст коефіцієнту
повздовжнього моменту на Δm z , під впливом якого літак буде
намагатись зменшити кут атаки, тобто повернутись до початкового
урівноваженого режиму.
Для статично нестійкого літака позитивний приріст кута
атаки(Δα>0) буде призводити до позитивного приросту коефіцієнту
повздовжнього моменту (Δm z >0). Для статично нейтрального літака
зміна кута атаки будь-якого знаку не змінює коефіцієнту
повздовжнього моменту.
Це пояснюється взаємним розташуванням центру тяжіння та
фокуса (точки прикладення приросту підйомної сили при зміні кута
атаки). Якщо фокус знаходиться позаду центру тяжіння, тобто
X F > X T , то позитивний приріст кута атаки(Δα>0) призведе до
119
120.
виникнення пікіруючого моменту (ΔM z <0) (рис. 3а). Нестійкий літакпоказано на рис. 3б. Взаємне розташування аеро- динамічного фокуса
та центра тяжіння для статично нейтрального літака показано на рис.
4.
a)
X
F
> X
б)
T
X
ΔMz<0
ΔY
F
< X
T
ΔMz>0
ΔY
x1
Δα > 0
XT
XF
V
XF
XT
x1
Δα > 0
V
ba
ba
Рис. 3. Напрямки дії повздовжнього моменту для статично стійкого(а) та
статично нестійкого літака – б
X
F
= X
T
ΔMz= 0
ΔY
x1
Δα > 0
XF = XT
V
ba
Рис. 4. Нейтральний літак
Різницю відносних координат
X F − XT
називають запасом поздовжньої статичної стійкості, а похідну
dm z
C
(3)
mz y =
=− XF − XT
dC y
називають ступінню повздовжньої статичної стійкості(дивись
формулу 2).
(
)
(
120
)
121.
На положення фокуса суттєво впливає кут стрілоподібності крила.Так, кінцевий зрив потоку, який виникає на кінцях стрілоподібного
крила навіть при відносно невеликих кутах атаки, призводить до
зменшення несучих властивостей кінцевих перерізів крила та до
збільшення несучих властивостей центральних перерізів. В наслідок
чого фокус може зміщуватись вперед, а запас повздовжньої статичної
стійкості буде зменшуватись.
Порядок виконання роботи та обробка результатів
експерименту
Модель літака встановлюється на моментному пристрої, який
дозволяє змінювати кут атаки моделі завдяки наявності осі обертання
0z 1 . Вісь обертання може змінювати своє положення по хорді моделі,
що дозволяє моделювати зміну її центру тяжіння – координату Х Т .
Вісь обертання жорстко скріплена з диском, на якому встановлена
стрілка, яка дозволяє контролювати кут атаки моделі(рис. 5, 6).
Повздовжній момент, виникаючий при зміні кута атаки
урівноважується важелями за рахунок тяг, поєднаних із диском.
121
122.
Вісь обертання O z1Модель літака
V
Шкала кутів атаки
моделі літака
Робоча частина АДТ
Важелі
–G1
Поворотний диск
+ G2
Рис. 5. Схема експериментальної установки для визначення
повздовжнього моменту моделі літака
Моментний пристрій встановлюється в робочій частині
аеродинамічної труби. Для заданої центрівки моделі ( X T ≈ 0.3 )
1
отримати експериментальні значення повздовжнього моменту М z в
діапазоні кутів атаки α ≈ –100…+200. Величина повздовжнього
моменту визначається як (рис. 6):
(4)
M=
(G1 − G2 ) r ,
z
де: G 1 та G 2 – значення важелів при урівноважені моделі на
заданому куті атаки( в залежності від того, кут атаки буде більший чи
менший за 0, один із важелів буде дорівнювати нулю);
r – радіус поворотного диску, а точніше – плече, на якому діє
сила важеля при урівноваженні повздовжнього моменту на даному
куті атаки α ї
122
123.
Шкала кутів атакиПоворотний
диск
F
+ΔY
Вісь
обертання
ЦТ (вісь
обертання)
–ΔMz
r
–ΔMz
x1
V
+Δα
Y ≈ Y1
а)
+ G2
Рис. 6. Утворення повздовжнього
моменту
на
моделі
літака,
розміщеній
на
поворотному
пристрої(а)
та
розрахунок
величини моменту Мz
в
експерименті (б)
G1=0
б)
–ΔMz = G2 r
Швидкість потоку витримувати постійною і контролювати за
допомогою мікроманометру.
Збільшити центрівку у два рази ( X T ≈ 0.6 ) і повторити
2
експеримент для тих же кутів атаки і того ж режиму роботи АДТ.
По отриманим значенням моменту тангажу Мz для різних кутів
атаки та положень центрівки розрахувати коефіцієнти повздовжнього
моменту mz за формулою:
(G1 − G2 )r ,
Mz
(5)
mz =
=
2
(
a
− a0 )cµSba
ρV
Sba
2
де с, μ – постійні мікроманометра;
(а-а0) – показання мікроманометра при контролі за швидкістю
повітряного потоку.
За даними експерименту будуються графіки залежностей
коефіцієнту моменту тангажу mz від кута атаки α для двох значень
центрівки, примірний вигляд яких надано на рис. 2.
Наступним етапом необхідно для кожної центрівки X T ≈ 0.3 та
1
α
X T 2 ≈ 0.6 графічно визначити похідну mz та по відомому значенню
123
124.
похідної C αy моделі літака визначити ступені повздовжньої статичноїстій- кості моделі літака, користуючись наступною формулою:
∆m z ∆α
mα
C
mz y ≈
⋅
≈ zα .
∆α ∆C y C y
(6)
Використовуючи формулу (3) даної роботи, визначити відносну
координату аеродинамічного фокуса моделі літака:
C
(7)
X= X
− mz y .
F
T
Особливо слід звернути увагу на те, що оскільки аеродинамічна
компоновка моделі літака у нас не змінювалась, то значення відносної
координати фокуса для двох положень центрівки повинні бути
рівними.
C
Порівняння величин похідних mαz та mz та їх знаків, відносних
координат фокуса X F , а також міркування щодо повздовжньої
статичної стійкості моделі літака при двох розглянутих центрівках
відобразити у висновках по лабораторній роботі.
y
Питання для самоконтролю
1. В якій системі координат визначаються моменти, які діють на
літак ?
2. Як називаються проекції результуючого моменту на вісі
зв’язаної системи координат ?
3. Що називається аеродинамічним фокусом літака ?
4. В чому полягає сутність виникнення повздовжнього моменту
при зміні кута атаки ?
5. Написати формулу для визначення моменту тангажу.
6. Відобразіть залежність mz=f(α) та поясніть характер її
протікання.
7. Що зветься повздовжньою статичною стійкістю літака?
8. Що розуміють під запасом та ступінню повздовжньої
статичної стійкості літака ?
9. Назвіть та поясніть всі умови повздовжньої статичної
стійкості літака.
124
125.
10. Як впливає горизонтальне оперення на координату фокусалітака ?
11. Як впливає відхилення керуючих поверхонь на повздовжній
момент літака ?
12. Як зміниться залежність mz=f(α) при збільшенні або
зменшенні координати центра тяжіння?
.
125
126.
ЛАБОРАТОРНА РОБОТА 15.ВИЗНАЧЕННЯ БОКОВИХ МОМЕНТІВ ЛІТАКА
Мета роботи – розкрити фізичну сутність утворення бокових
моментів літака та вплив на них кутів атаки та ковзання;
– закріпити знання основних теоретичних положень щодо
бокового руху літака;
– отримати експериментально та проаналізувати залежності
mx=f(β, δел), my= f(β, δн) моделі літака для різних кутів ковзання,
визначити значення похідних
mxβ та mуβ
і вплив на них кутів
відхилення керуючих поверхонь.
Основні теоретичні положення
При польоті літака із ковзанням (β≠0) виникають бокові моменти
крену Мх та рискання Му, обумовлені тим, що бокова сила Z, діюча на
літак, не проходить через центр тяжіння(де міститься початок
зв’язаної системи координат т.0), а прикладена у боковому фокусі.
Бокова сила Z утворюється, головним чином, вертикальним
оперенням (во), фюзеляжем (ф), мотогондолами та ін. Разом з цим,
кут ковзання суттєво змінює несучі властивості крила вздовж
розмаху, створюючи цим крен літака.
У загальному випадку моменти крену та рискання визначаються
наступним чином:
ρV 2
Sl ,
2
ρV 2
M y = my
Sl ,
2
M x = mx
(1)
(2)
де: mx та my – коефіцієнти моментів крену та рискання;
l – розмах крила.
Величина коефіцієнтів mx та my залежить від кута ковзання літака
β, аеродинамічної компоновки літака, кута відхилення управляючих
поверхонь δ, кута атаки α (якісні залежності коефіцієнтів mx та my від
деяких із названих факторів показані на рис. 1, 2.
126
127.
mxχ = const
β
mx < 0
-β
β
0
α = 40 , δел=00
α = 40 , δел=200
Рис. 1. Залежність коефіцієнту моменту крену mx
від кута ковзання β та кута відхилення
елеронів δел
Залежність коефіцієнтів mx та my від кута ковзання характеризує
бокову статичну сталість літака, тобто усувати ковзання при його
виникненні та здійснювати крен на крило протилежне ковзанню.
Умовами статичної стійкості літака у боковому русі є негативне
β
β
значення похідних mx < 0 та m y < 0 . Якщо ці похідні позитивні, то
літак вважається статично несталим у боковому русі.
my
β
mу < 0
-β
β
0
δ р.н. < 0
δ р.н. =
δ р.н. >
0
0
Рис. 2. Залежність коефіцієнту моменту
рискання mу від кута ковзання β та кута
відхилення руля напряму δрн
127
0
128.
Розглянемо вплив ковзання, кутів атаки, форми крила в плані, атакож відхилення рульових поверхонь на бокові моменти літака.
При ковзані літака виникають бокові сили: на фюзеляжі (у носовій
його частині) – Zф та на вертикальному оперені – Zво.
Природа виникнення цих сил аналогічна природі виникнення
підйомної сили фюзеляжу та крила (див. рис. 3а). Бокова сила
фюзеляжу Zф прикладена у носовій його частині(попереду центру
тяжіння) і створює відносно нього (цт) дестабілізуючий момент Муф,
який намагається збільшити кут ковзання. Бокова сила вертикального
оперення
Zво
прикладена позаду центру тяжіння і створює
флюгерний момент Му во , який намагається зменшити кут ковзання.
Результуюча бокова сила Z прикладена у боковому фокусі літака
FБ(рис. 4) та створює момент Му, який спрямований на зменшення
кута ковзання β, якщо боковий фокус знаходиться позаду центру
β
тяжіння. У цьому випадку похідна m y < 0 , літак статично стійкий. У
протилежному випадку – літак статично не стійкий. У розглянутому
випадку зміна кута атаки незначно впливає на величину моменту Му.
При ковзані літака із стрілоподібним крилом суттєво змінюються
несучі властивості правого та лівого пів крил внаслідок зміни
ефективних
кутів
стрілоподібності.
Ефективний
кут
стрілоподібності – це кут між передньою кромкою крила та
площиною, яка перпендикулярна до вектору швидкості незбуреного
потоку(швидкості польоту). Так, для випадку, показаного на рис. 3а
ефективна стрілоподібність правого пів крила дорівнює (χ−β), а лівого
– (χ+β). Іншими словами, праве пів крило ближче до прямого, а у
лівого – стрілоподібність збільшується. Тому підйомна сила правого
пів крила Yпр. буде більше підйомної сили лівого пів крила Yл (рис.
3.1, рис. 3,б). Внаслідок цього виникає момент крену Мх<0. Сприяє
збільшенню моменту крену і бокова сила Zво , точка прикладення якої
лежить вище повздовжньої вісі Ох1 , внаслідок чого відносно
нормальної вісі Оу1 на плечі до центру тяжіння вона створює момент
Му во. Збільшення кута атаки у цьому випадку збільшує різницю
підйомних сил між правим та лівим пів крилами(дивись рис. 3.1) , а,
значить, і момент крену Мх .
128
129.
х1V
а)
+β
Z ф.
χ
еф. лів = χ + β
χ
еф.пр = χ –β
β
χ
z1
эф. лів.
0
χ
χ
FБ
Z
β
еф. прав.
χ
-Му
Xлів
Xпр.
ZBO.
б)
А
По А
у1
Yправ.
Yлів.
ZBO.
z1
0
-Мх
Рис. 3. Утворення моментів Мх та Му на літаку із стрілоподібним
крилом: а) вплив ефективної стрілоподібності на моменти Мх та Му; б)
вплив крила та вертикального оперення на утворення моменту крену
129
130.
Суχ
еф. прав.
∆ Су
χ
αі
0
еф. лів.
α
Рис. 3.1 Утворення моментів Мх та Му на літаку із стрілоподібним крилом:
залежність несучих якостей крил із різною стрілоподібністю при різних
кутах атаки.
Різниця за величиною коефіцієнтів підйомної сили правого та
лівого пів крил створюють різницю і в силах індуктивного опору
правого і лівого пів крил, що сприяє курсовій стійкості літака
(створюється момент рискання спрямований на зменшення кута
ковзання).
Моменти крену та рискання утворюються, окрім зміни кута
ковзання, також за допомогою керуючих поверхонь – органів
поперечного та курсового керування – елеронами, інтерцепторами,
рулями напрямку, диференційно, що відхиляються консолями
стабілізатора. Тому коефіцієнти mx та my при відхилені елеронів та
руля напрямку більші за абсолютною величиною, ніж при не
відхилених рульових поверхнях(рис. 1, 2). Однак на великих кутах
атаки внаслідок зриву повітряного потоку на крилі, особливо на
стрілоподібних крилах у кінцевих перерізах, ефективність елеронів
різко знижується. Момент крену, який виникає внаслідок
несиметричного зриву потоку, може бути за величиною таким, що
його неможливо буде компенсувати відхиленням елеронів. По цій
причині виникає звалювання літака на крило.
Для збільшення ефективності поперечного керування літаком
застосовують поряд з елеронами інтерцептори, на тяжких літаках
застосовують по дві секції елеронів – внутрішню та зовнішню, на
великих швидкостях застосовують зовнішню, на малих – обидві.
130
131.
На етапі зниження та посадки у зв’язку із великою поперечноюстійкістю літаків із стрілоподібними крилами та "нехваткою елеронів"
вводиться обмеження по величині бокового вітру(не більше 15м/с).
Порядок виконання роботи та обробка результатів
експерименту
Для визначення моменту рискання літака Му модель кріпиться
на осі Оу1 , яка жорстко поєднана з поворотним диском моментного
пристрою, радіус якого r (рис. 4).
Вісь обертання O у1
Модель літака
V
Шкала кутів
ковзання моделі
Робоча частина АДТ
Важелі
–G1
Поворотний диск
+ G2
Рис. 4. Схема експериментальної установки для визначення
моменту рискання моделі літака
Цей моментний пристрій встановлюється у робочій частині
аеродинамічної труби. Встановлюються кути ковзання β від –200 до
+200 через кожні 50. Контроль кутів β виконується за допомогою
стрілки та шкали кутів ковзання. Швидкість повітряного потоку
витримується
постійною
протягом
всього
експерименту.
131
132.
Урівноважується модель на заданому куті ковзання за допомогоюважелів, тяги яких жорстко поєднані з поворотним диском. Таким
чином момент рискання при даному куті β буде дорівнювати: Му=–
G1r або Му=G2 r , в залежності від того, який момент никання
створюється – позитивний чи негативний. Наступним етапом
необхідно відхилити руль напряму моделі спочатку на +150 , а потім –
на -150 та провести так само вимірювання моменту рискання у тому ж
діапазоні кутів β =–200…+200.
Для визначення моменту крену літака Мх модель кріпиться у
моментному пристрої на осі Ох1, яка здатна обертатись разом з
моделлю (рис. 5).
На цій осі жорстко кріпиться поворотний диск, на який
підвішуються
важелі G3, G4 для урівноважування моделі на
заданому куті крену γ.
Модель з віссю Ох1 розташовується у рухомій рамці, яка здатна
обертатись навколо осі Оу1 і тим самим встановлювати модель під
заданим кутом ковзання β. Кут ковзання контролюється по шкалі
кутів ковзання. Цей моментний пристрій розташовується у робочій
частині аеродинамічної труби. Задаючи кут ковзання в діапазоні –
200…+200 через кожні 50, урівноважуємо момент крену за допомогою
важелів.
G3, G4. Знаючи радіус диску r2, визначаємо момент крену Мх на
заданому куті ковзання:
Мх = (–G3 +G4)r2 .
(3)
В залежності від знаку кута ковзання, один із важелів буде
дорівнювати 0. Після цього, визначаємо моменти крену при
відхилених елеронах на кут 200 у тому ж діапазоні кутів ковзання (β=200…+200). Швидкість повітряного потоку витримується постійною
протягом всього експерименту.
Визначивши моменти крену та рискання, визначаємо
коефіцієнти цих моментів для заданих кутів ковзання:
mx =
Mx
(G1 − G2 )r1
=
2
(a − a0 )KcSl
ρV
Sl
2
132
(4)
133.
my =Вісь обертання Ох1
My
ρV
Sl
2
2
=
(G3 − G4 )r2
(a − a0 )KcSl
(5)
Вісь обертання Оу1
Важелі каналу крену
Поворотний диск
А
V
Рамка
G3
G4
Шкала кутів
ковзання моделі β
Поворотний диск
133
Модель літака
134.
Вид А (γ≠0)Шкала кутів
крену моделі γ
Рамка
Поворотний
диск
G3
Важелі каналу
крену
G4
Рис. 5. Схема моментного пристрою для
визначення моменту крену моделі літака
На підставі отриманих значень коефіцієнтів бокових моментів
будуються графіки їх залежностей від кутів ковзання та відхилення
елеронів та руля напряму – mx= f(β, δел), my= f(β, δн), якісний вигляд
яких надано на рис. 1, 2.
Використовуючи побудовані графіки необхідно визначити похідні
mβx ≈
∆m
y
x та mβ ≈
.
y
∆β
∆β
∆m
У висновках по роботі відзначити, що розуміють під боковою
статичною стійкістю літака, які фактори впливають на статичну
стійкість по крену та рисканню, умови статичної стійкості літака у
боковому каналі.
Питання для самоконтролю
1. Що називається кутом ковзання ?
2. Що називається боковою силою та як вона утворюється на літаку
?
134
135.
3. Який знак має бокова сила вертикального оперення привід'ємному та позитивному значеннях кута ковзання ?
4. Що таке момент крену ?
5. Які частини літака утворюють момент крену при ковзані ?
6. Як впливає стрілоподібність крила на утворення моменту крену
?
7. Як впливає на момент крену кут поперечного "V" крила ?
8. Як впливає кут атаки на величину моменту крену літака із
стрілоподібним крилом ?
9. Зобразіть та поясніть залежність mx=f(β, δел ).
10. Який момент називають моментом рискання ?
11. Які частини літака утворюють момент рискання при наявності
ковзання ?
12. Як зміниться момент рискання, якщо збільшити подовження
носової частини фюзеляжу ?
13. Як зміниться момент рискання літака, якщо площу вертикального
оперення збільшити ?
14. Як зміниться момент крену літака, якщо збільшити висоту
вертикального оперення при тій же самій його площі ?
15. Зобразіть та поясніть залежність mу=f(β, δн ).
16. Що розуміють під боковою статичною стійкістю літака ?
17. Назвіть та поясніть умови бокової статичної стійкості літака.
135
136.
ЛАБОРАТОРНА РОБОТА 16.ВИЗНАЧЕННЯ ШАРНІРНОГО МОМЕНТУ РУЛЯ ВИСОТИ
Мета роботи – розкрити природу утворення шарнірних моментів
рульових поверхонь та визначити коефіцієнт шарнірного моменту при
різних кутах атаки та кутах відхилення руля висоти.
Основні теоретичні положення
Шарнірним моментом руля висоти називають момент аеродинамічної сили R, який діє на руль висоти. Цей момент визначається відносно осі обертання (осі шарніру), відносно якої
повертається руль висоти (рис. 1а).
Шарнірний момент характеризує величину зусилля, яке льотчик
повинен прикласти для керування літаком по тангажу, рисканню,
крену. Величина аеродинамічної сили, її положення, а, відповідно, і
величина шарнірного моменту залежить від форми рульової поверхні,
положення осі обертання, кута атаки стабілізатора(крила), кута
ковзання вертикального оперення та кута відхилення відповідної
рульової поверхні, швидкості польоту та ін. Шарнірний момент
визначається за формулою:
M ш = mш
2
ρVг.о.
S р.в.bр.в
2
(1)
де: mш – коефіцієнт шарнірного моменту;
Vг.о. – швидкість повітряного потоку біля горизонтального
оперення ( з урахуванням гальмування потоку, що має місце при
обтіканні крила та фюзеляжу);
S р.в. – площа руля висоти;
bр.в.
– середня хорда руля висоти.
Із збільшенням швидкості та площі руля шарнірний момент
збільшується. Разом з цим збільшується зусилля на органи
управління, яке може перебільшити фізичні можливості льотчика. З
метою зменшення шарнірного моменту застосовують різні способи, у
136
137.
тому числі і різні види аеродинамічної компенсації руля, сутність якоїполягає у перерозподілі зусиль, які діють на руль висоти, та до
розвантаження шарнірного моменту. Найбільш розповсюдженим
видом аеродинамічної компенсації є осьова компенсація (рис.1б).
При осьовій компенсації вісь шарніру руля зміщується назад відносно
передньої кромки руля, внаслідок чого на передній частині руля
з'являється сила R2, яка створює момент Mш2 протилежного знаку,
який розвантажує(зменшує) шарнірний момент – Mш1.
Ступінь осьової компенсації оцінюється відносною площею
компенсації S ок , тобто відношенням площі компенсуючої поверхні
(площа, яка знаходиться попереду осі обертання рульової поверхні)
Sок до площі рульової поверхні Sр: S ок =
S ок
. Зазвичай це відношення
Sр
не повинно перевищувати 0,20. Перекомпенсація руля неприпустима.
– Мш
αг.о.
R
Vг.о.
P
δв
Вісь обертання
а)
αг.о.
+ Мш
Vг.о.
– Мш
R2
P
R1
δв
Вісь обертання
б)
Рис. 1. Схема утворення шарнірного моменту та його компенсація
а – без осьової компенсації; б – зменшення шарнірного
моменту за рахунок осьової компенсації
Коефіцієнт шарнірного моменту, як показують результати
експерименту, при невеликих змінах кута атаки горизонтального
137
138.
оперення α г.о. та відхиленнях руля δ є лінійною функцією цих кутів іможе бути наданий у вигляді:
(2)
mш = mшα α г.о. − mшδ δ
де: mшα =
∂mш
∂mш
; mшδ =
∂δ
∂α
Для рулів з осьовою компенсацією при числах М < Мкр.
значення mшα та mшδ можуть бути визначеними за наступними
формулами:
3
2
S
δ
о.к.
α
mш = −0,14 1 − 6,5
S г.о.
р.в
(3)
S р.в.
S о.к.
1 − 3,6
α г.о.
S г.о.
S р.в.
(4)
mшα = −0,12
де: Sо.к. – площа осьової компенсації;
Sр.в. – площа горизонтального оперення ( S о.к. =
S о.к.
; S р.в.
відносна площа осьової компенсації)
аг.о. – похідна від Су г.о. по куту атаки г.о. (як правило
аг.о ≈ 0.05…0.07, якщо кути атаки вимірюються у градусах).
Знаючи величину шарнірного моменту можна визначити силу Р,
яка урівноважує шарнірний момент і передається на ручку або педалі
керування літаком:
Рр.к. = – kш Р ,
(5)
де: kш – коефіцієнт передачі.
Порядок виконання роботи та обробка результатів
експерименту
Схема експериментальної установки наведена на рис. 2.
Горизонтальне оперення, до якого належать стабілізатор та руль
висоти, закріплено у моментному приладі з таким розрахунком, щоб
вісь приладу співпадала з віссю шарніру руля. Стабілізатор
138
139.
закріплюється непохитно на тому чи іншому куті атаки. Руль висотиможе вільно обертатись навколо свого шарніру. Шарнірний момент,
який виникає при обдувці оперення, урівноважується важелями G1 та
G2 ваг так, що
Мш = (G1 – G2 ) r ,
(6)
де: r – радіус поворотного диску (плече, на якому діє важіль (G1
– G2).
Стабілізатор
Руль
висоти
Вісь обертання
Vг.о.
αго
Vг.о.
-δв
+δв
Шкала кутів
відхилення руля
Важелі
Поворотний
–G1
+
Рис. 2. Схема експериментальної установки для визначення шарнірного
моменту руля висоти
Задаючись рядом значень α г.о. і відхиляючи на кожному куті
атаки руль у межах
±δ0 (діапазон зміни кутів α г.о. та δв0
визначається викладачем), обчислюють для кожного значення α г.о.
та δ0 значення шарнірного моменту Мш. Значення коефіцієнту mш
визначають за формулою:
mш =
Mш
ρV
S р.в.bр.в.
2
2
139
(7)
140.
Швидкіснийнапір
біля
оперення
2
ρVг.о.
2
визначається
за
допомогою трубки повного тиску, яка встановлюється у потоці:
2
ρVг.о.
= c(a − a0 )µ
2
(8)
де: (а – а0) – показання мікроманометру;
с – константа мікроманометру; μ – коефіцієнт поля динамічних
тисків АДТ.
Знак шарнірного моменту визначається по загальному правилу: в
бік зменшення кута δв0 – мінус, в бік збільшення кута δв0 – плюс (див.
рис. 2).
Результати замірів та константи експерименту заносяться у
відповідні таблиці протоколу лабораторної роботи.
За даними розрахунків будують графіки mш=f(αг.о., δв)(рис. 3) та
роблять висновки стосовно необхідності компенсації.
αг.о.= - 60
mш
0.08
-20
20
0
δ0в
–0.08
αг.о.=
00
60
120
–0.16
Рис. 3. Графік залежності коефіцієнту шарнірного моменту від кута атаки
горизонтального оперення та кута відхилення руля висоти δв
Для визначення безпосереднього впливу ступеню осьової
компенсації на величину шарнірного моменту виконується наступний
експеримент. На тій же самій моделі горизонтального
оперення використовується руль висоти з трьома положеннями
осей обертання, які відповідають різним ступеням осьової компенсації
140
141.
відповідно Sок = 0; 0.15; 0.35(рис. 4). Продувки виконуються для кутаатаки горизонтального оперення αго = 00 з відхиленням руля висоти на
кути δв=0…300 через кожні 50. Визначається сила, яка урівноважує
шарнірний момент при даному куті відхилення руля висоти,
визначається відповідне значення шарнірного моменту та його
коефіцієнту. Такі продувки виконуються для трьох положень осей
обертання, яким відповідають свої значення ступенів осьової
компенсації( Sок = 0; 0.15; 0.35).
Vго
Sок = 0
Sок = 0.15
Sок = 0.35
Рис. 4 . Руль висоти з різним положенням осей обертання
(різними ступенями осьової компенсації)
За результатами експерименту будуються графік залежності
коефіцієнту шарнірного моменту mш від ступеню осьової компенсації
Sок та кута відхилення рульової поверхні δв (рис. 5). На графіку
необхідно вказати відповідну криву та ділянку на ній, яка відповідає
перекомпенсації рульової поверхні.
141
142.
αго = 0 0mш
0
10
20
δ0рв
30
0.35
- 0.2
0.15
Sок
- 0.4
0
- 0.6
Рис. 5. Графік залежності mш=f( Sок ,δв)
Питання для самоконтролю
1. Що називається шарнірним моментом рульової поверхні ?
2. Поясніть сутність утворення шарнірного моменту.
3. Поясніть принцип дії осьової компенсації.
4. Назвіть засоби зменшення шарнірних моментів та в чому
полягає їх сутність.
5. Яким чином впливає шарнірний момент на величину зусилля
на ручці управління літаком ?
6. З якою метою застосовують тример рульової поверхні ?
7. В чому полягає явище перекомпенсації рульової поверхні ?
8. В чому полягає зміст експерименту по визначенню
шарнірного моменту ?
142
143.
ЛАБОРАТОРНА РОБОТА 17.ВИЗНАЧЕННЯ ХАРАКТЕРИСТИК САМООБЕРТАННЯ
КРИЛА
Мета роботи – розкрити фізичну сутність впливу кута атаки на
самообертання крила;
– виконати експеримент по впливу кута атаки на самообертання
крила та визначити вплив кута атаки на кутову швидкість
самообертання.
Основні теоретичні положення
Характеристики самообертання (авторотації) крила дозволяють
міркувати про бокову сталість літака у польоті на закритичних кутах
атаки. Характеристикою авторотації є залежність параметру
авторотації від кута атаки крила:
ωl /2· V∞ =f(α ),
(1)
де: ω – кутова швидкість обертання крила;
V∞ – швидкість незбуреного потоку;
α – кут атаки крила;
l – розмах крила.
Самообертання крила виникає під впливом аеродинамічних
моментів Мх та Му , які виникають на закритичних кутах атаки. На
докритичних кутах атаки вказані моменти є демпфуючими. На рис. 1
показано, що при обертанні на праве напівкрило кут атаки у правого
напівкрила збільшується, а у лівого – зменшується на величину Δα
(sin Δα=ω r /V∞). При цьому коефіцієнт підйомної сили Су правого
напівкрила зменшується(див. рис. 2), а коефіцієнт лобового опору Сх
збільшується, і, навпаки, Су лівого напівкрила збільшується, а Сх –
зменшується. Такий розподіл Су та Сх правого та лівого напівкрил
спонукають виникненню моментів Мх , Му
та, як наслідок,
самообертанню крила. Кутова швидкість самообертання буде
визначатись величиною кута атаки крила. З цієї точки зору весь
діапазон зміни кутів атаки та, відповідно, Су і Сх можна розділити на
чотири зони.
143
144.
Mx демпф+ΔСу
ωx
Ліве півкрило
α – Δα
α
Vіс
Vy = ω z
Праве півкрило
z1
–ΔСу
α + Δα
Vнезб α
Vy = ω z
Vіст
–Δα
Зменшення кутів атаки перерізів та
несучих властивостей лівого
напівкрила
Vіс
Δα
Збільшення кутів атаки перерізів та
несучих властивостей правого
напівкрила
Рис. 1. Схема обтікання крила при його обертанні
Зона І визначається зміною кутів атаки приблизно від нуля до αкр .
В цьому діапазоні виникають демпфуючі моменти Мх дем та Му дем , які
запобігають само обертанню(рис. 2).
144
145.
Mx демпфMx
ωx
ωx
Су
Діапазон закритичних
кутів атаки
0
200
400
600
800
α, град
Рис. 2. Залежність коефіцієнта підйомної сили від кутів атаки
крила
Зона ІІ визначається зміною кутів атаки крила від αкр до ~350. Ця
зона характерна активною авторотацією. Однак при збільшені кутової
швидкості обертання праве напівкрило може вийти на кути атаки
більші за 350 і в подальшому його коефіцієнт підйомної сили почне
збільшуватись. Ліве напівкрило може вийти на такі малі кути атаки,
що його коефіцієнт Су зменшиться. Такий розподіл коефіцієнтів Су
правого та лівого півкрил призведе до того, що при певних кутах
атаки момент самообертання стане дорівнювати нулю і кутова
швидкість стане постійною. Цей режим зветься режимом сталої
авторотації. Очевидно, що кожному куту атаки буде відповідати
своя кутова швидкість сталої авторотації(рис. 2).
Зона ІІІ визначається зміною кутів атаки приблизно від 350 до 800.
Це зона прихованої авторотації. Прихованою вона зветься тому, що
умов для авторотації тут немає, тому що при обертанні повинен
виникати демпфуючий момент Мх дем. Але при достатньо великій
початковій кутовій швидкості кінцеві перерізи напівкрил можуть
попасти: праві – в зону ІV, ліві – в зону ІІ , що викличе авторотацію.
145
146.
Зона ІV визначається занадто великими кутами атаки – 800…900.При досягненні таких кутів атаки в цій зоні можливе самодовільне
обертання.
Порядок виконання роботи та обробка результатів
експерименту
Для визначення кутової швидкості обертання крила при
відповідних закритичних кутах атаки, модель крила встановлюється
на спеціальному пристрої (рис. 3).
Пристрій дозволяє отримати характеристики самообертання крила
тільки відносно повздовжньої вісі Ох1. Для цього необхідно визначити
для кожного закритичного кута атаки параметр
ωl
. Кут атаки крила
2V∞
встановлюється гвинтом і визначається по шкалі. Кутова швидкість
визначається після заміру обертів обертання крила, задля чого на
приладі встановлено оптичний лічильник обертів. Відрахунок обертів
необхідно робити при встановлені режиму самообертання.
За динамічним тиском
потоку
ρV∞2
= (a − a0 )Kµ визначається швидкість
2
V∞ =
2(a − a0 )Kµ
ρ
146
.
147.
у1Механізм зміни
кутів атаки
Обертаєме крило
z1
0
ωx
x1
V∞
Оптичний лічильник
обертів крила
Гвинт встановлення
кутів атаки
Шкала кутів
атаки
Рис. 3. Пристрій для визначення характеристик самообертання крила
Щільність повітря ρ визначається за графіком на підставі
заміряних температури Т0 та тиску повітря р. Результати
експерименту надаються у вигляді залежності
Графік цієї залежності надано на рис. 4.
147
ωl
від кута атаки α.
2V∞
148.
ωx l2 V∞
0
400
800 α, град
Рис. 4. Графік залежності кутової швидкості самообертання крила
від кута атаки
Питання для самоконтролю
1. В яких одиницях вимірюється кутова швидкість ?
2. Що таке кут атаки крила ?
3. Назвіть моменти, які діють на крило.
4. Як змінюються місцеві кути атаки при обертанні крила ?
5. Як виникають демпфуючий момент крену ?
6. Нарисуйте графік залежності Су=f(α) для крила, покажіть
характерні кути атаки.
7. Що таке індуктивний опір, причина його утворення ?
8. Які моменти утворюються за допомогою індуктивного опору
при обертанні крила навколо повздовжньої вісі Ох1 ?
9. Яким чином визначається кутова швидкість обертання крила
при виконанні лабораторної роботи ?
10. Розкажіть порядок виконання лабораторної роботи.
148
149.
ЛАБОРАТОРНА РОБОТА 18.ВИЗНАЧЕННЯ АЕРОДИНАМІЧНИХ ХАРАКТЕРИСТИК
ПОВІТРЯНОГО ГВИНТА ЛІТАКА
Мета роботи – розкрити фізичну сутність роботи повітряного
гвинта та режимів його роботи;
– закріпити знання основних теоретичних положень щодо
аеродинамічних характеристик повітряного гвинта літака;
– у ході фізичного експерименту в АДТ визначити силу тяги,
потужність гвинта, його коефіцієнт корисної дії та побудувати
нормальну характеристику.
Основні теоретичні положення
Повітряний гвинт призначений для створення сили тяги,
виникаючої за рахунок реактивної дії маси повітря, що відкидається,
яке проходить через площину його обертання та збільшує свою
швидкість.
До основних геометричних параметрів повітряних гвинтів
відносяться: діаметр гвинта D, відносний радіус лопаті гвинта
r=r
R
, де r – поточний радіус лопаті, кількість лопатей і, профіль
лопаті, кут установки елемента (перерізу) лопаті φ, форма лопаті в
плані.
До основних кінематичних характеристик повітряних гвинтів
відносяться (рис. 1): кут атаки перерізу лопаті α, кут протікання
струменів β, швидкість поступового руху V, кутова швидкість
обертання гвинта ω, колова швидкість Vr=ωr, результуюча швидкість
руху перерізу лопаті W, коефіцієнт швидкості (відносний крок) λ .
Викликані гвинтом осьова та колова швидкості плавно змінюються
вздовж потоку, при цьому половина їх повного приросту
здійснюється до площини обертання гвинта, а половина після неї.
Маса повітря збільшує свою швидкість, як результуючу W, так і її
складові – колову Vr та поступову V відповідно на величину ∆V, ∆Vr,
149
150.
∆W, які називаються індуктивними складовими. З метою спрощеннявикладок їх враховувати ми не будемо.
ω<0
α
β
φ Vr
W
V
Плоскість обертання
повітряного гвинта
Напрям поступового
руху (V)
Рис. 1. Кінематичні
характеристики повітряного
гвинта
Важливою кінематичною характеристикою гвинта є коефіцієнт
швидкості λ , який визначається співвідношенням:
V
(1)
λ=
,
nc D
де: V – швидкість польоту;
nс – число обертів гвинта в секунду.
Коефіцієнт швидкості λ при даному значені кута установки лопаті
φ однозначно пов'язаний з кутом атаки α. Нехтуючи індуктивними
швидкостями, покажемо це: α=φ–β,
V
V
V D
λ
λ
=
=
=
=
tgβ =
r
Vr ωr 2πnc r D
2πr
2π
D
λ
β = arctg
2π r
D
150
151.
λ(2)
α = ϕ − β = arctg
2π r
D
Таким чином, зміна коефіцієнта швидкості еквівалентна зміні кута
притікання струменів β, або зміні кута атаки α (при постійнім куті φ).
Тяга гвинта Р, яка являє собою суму проекцій dP на ось обертання
елементарних аеродинамічних сил dR, що виникають на елементарних
площах dS лопаті (рис. 2). Визначається по формулі, структура якої
ρV 2
має вигляд подібний формулі підйомної сили крила ( Ya = C ya
S ).
2
За характерну швидкість приймається швидкість пропорційна
швидкості кінця лопаті (nсD), за характерну площу – D2 , а коефіцієнт
пропорційності позначають α :
де α =
P
ρ nc2 D 4
(3)
P = α ρnc2 D 4
– коефіцієнт тяги (пропорційності, безрозмірний),
залежить від кута установки лопаті φ, коефіцієнту швидкості λ ,
геометричної форми лопатей, кількості лопатей, чисел М, Re. Цей
коефіцієнт визначається зазвичай експериментально.
Потужність гвинта N, яка витрачається на подолання сили опору
його обертанню, в загальному випадку визначається формулою
N=Mω, і являє собою суму проекцій dТ на площу обертання
елементарних аеродинамічних сил dR та пропорційна ρ, nс , D :
(4)
N = β ρ nc3 D 5 .
У цій формулі β – коефіцієнт потужності повітряного гвинта
(безрозмірний)
β=
N
ρ nc3 D 5
.
(5)
Коефіцієнт корисної дії повітряного гвинта η оцінює долю
перетворення отриманої від двигуна енергії у роботу сили тяги і може
бути наданий наступним співвідношенням:
151
152.
η=.
(6)
dТ
dR
V
αV
α
PV
=
λ
=
N
β nc D 5 β
dP
β
α
φ
W
Обертаючий момент від
Vr
двигуна на вал обертання
повітряного гвинта
V
Рис. 2. Утворення сили тяги dP та лобового опору dX
на елементі лопаті повітряного гвинта
Оскільки сила тяги та потужність гвинта залежать від кута атаки, а
значить від кута установки φ, коефіцієнта швидкості λ (дивись
вирази 2), то аеродинамічні характеристики повітряних гвинтів
прийнято
надавати
у
вигляді
залежностей
=
α f=
(λ ), β f (λ ), =
та η f (λ ) , побудованих для різних значень
кутів φ. Залежності коефіцієнтів α, β, η від коефіцієнта швидкості
λ при заданому значенні φ та швидкості польоту V називають
нормальними характеристиками повітряного гвинта, якісний вигляд
яких надано на рисунку 3.
На нормальній характеристиці виділяються основні режими
роботи повітряного гвинта:
т. 0 – режим роботи гвинта на місті; ділянка 0…А – основний або
тяговий режим роботи; т. А – режим нульової тяги; ділянка А…В –
режим гальмування або зворотної тяги; т. В – режим нульової
потужності; ділянка правіше т. В – режим вітряка. Нормальні
характеристики повітряних гвинтів отримують в експерименті.
152
153.
α; β; ηη max
η
α
φ = const
β
0
А
λ optim
В
λ
Рис. 3. Нормальні характеристики
повітряного гвинта
Порядок виконання роботи та обробка результатів
експерименту
Для проведення експерименту модель чотирилопатевого
повітряного гвинта з редуктором встановлюється у робочій частині
аеродинамічної труби (рис.4) таким чином, що вісь обертання гвинта
паралельна вектору швидкості набігаючого потоку V. Гвинтовий
пристрій з приладом для вимірювання крутячого моменту приводить
до обертання модель гвинта і урівноважує крутячий момент
відповідним відхиленням (на кут ψ) вантажу G, який закріплено на
плечі "b" від осі приводу редуктора(рис. 4 вид по А, Б). Осьове
зусилля Х', еквівалентне силі тяги гвинта, вимірюється
аеродинамічними вагами.
Експеримент проводять із заданим кутом установки повітряного
гвинта φ (за кут установки гвинта приймають кут установки всіх його
лопатей на відносному радіусі r = 0.75 від осі обертання).
Коефіцієнт швидкості λ змінюють так, щоб охватити всі режими
роботи. При постійних обертах гвинта nc це робиться шляхом зміни
швидкості набігаючого потоку V (контролюється мікроманометром).
153
154.
У ході експерименту замірювати осьові зусилля Х', які еквівалентнітязі гвинта Р. Для кожної швидкості знімаються показання кутів ψ
відхилення вантажу G, які еквівалентні крутячому моменту Мк гвинта
(рис. 4 вид Б).
По отриманим в експерименті значенням осьових зусиль Х' та
кутів ψ розрахувати коефіцієнти тяги α , потужності β , коефіцієнт
корисної дії η, використовуючи наступні співвідношення:
α
=
β=
( X 0 − X у .пр ) − X ′
=
ρ nc2 D 4
P
=
ρ nc2 D 4
X
ρ nc2 D 4
M K • ω 2G b sin ψ 2π nc
4π G b
N
=
=
=
sin ψ
ρ nc3 D 5 ρ nc3 D 5
ρ nc3 D 5
ρ nc2 D 5
η=
α
λ
β
.
,
(7)
, (8)
(9)
У цих співвідношеннях:
Х0 – початкові покази ваг;
Ху.пр.– сила лобового опору утримуючого пристрою
(визначається за графіком рис. 2 лабораторної роботи "Визначення
коефіцієнтів лобового опору тіл різної форми");
Х' – поточні показання осьових зусиль;
ψ – поточні значення кутів відхилення вантажу.
Коефіцієнт швидкості λ визначається в залежності від швидкості
незбуреного повітряного потоку V в АДТ:
2
λ=
V
nc D
=
ρ
(a − a 0 ) K c
(10)
nc D
За
результатами
розрахунків
побудувати
нормальні
характеристики досліджуваного повітряного гвинта для заданого кута
установки лопатей φ, якісний вигляд яких надано на рис. 3.
У висновках по роботі проаналізувати характер зміни побудованих
залежностей нормальних характеристик та зобразити трикутники
швидкостей для основних режимів роботи повітряного гвинта.
154
155.
Модель гвинтаСтренги утримуючого
пристрою
А
Р
V
Робоча частина АДТ
Редуктор
По А
По Б
Шкала відрахунку
кутів ψ
Б
ψ
Б
Гнучка ресора
Вантаж
b
Гвинтовий пристрій з
приладом для
вимірювання крутячого
моменту
G
Рис. 4. Розміщення в АДТ експериментальної установки для визначення
сили тяги повітряного гвинта та крутячого моменту (принципова схема)
155
156.
Питання для самоконтролю1. Поясніть призначення та принцип роботи повітряних гвинтів.
2. Назвіть основні геометричні характеристики повітряних
гвинтів.
3. Зобразіть трикутники швидкостей перерізу лопаті гвинта та
назвіть основні кінематичні характеристики повітряних гвинтів.
4. Поясніть причини виникнення аеродинамічних сил на
елементі лопаті повітряного гвинта.
5. Напишіть формулу, за якою визначається тяга повітряного
гвинта.
6. Напишіть формулу, за якою визначається потужність
повітряного гвинта.
7. Від чого залежать коефіцієнти тяги та потужності повітряного
гвинта ?
8. Що таке коефіцієнт корисної дії повітряного гвинта, чим він
визначається ?
9. Зобразіть нормальні характеристики повітряного гвинта,
вкажіть характерні точки.
10. Покажіть основні режими роботи гвинта на нормальних
характеристиках.
11. Побудуйте та поясніть трикутник швидкостей для основного
режиму роботи повітряного гвинта.
12. Розкажіть порядок виконання роботи.
13. Чим урівноважується крутячий момент гвинта у роботі ?
14. Як визначається сила тяги гвинта у лабораторній роботі ?
156
157.
ЛАБОРАТОРНА РОБОТА 19.ВИЗНАЧЕННЯ АЕРОДИНАМІЧНИХ ХАРАКТЕРИСТИК
НЕСУЧОГО ГВИНТА ВЕРТОЛЬОТА
Мета роботи – розкрити фізичну сутність роботи несучого гвинта
(НГ) вертольота на режимі осьової та косої обдувки;
–
закріпити знання основних теоретичних положень стосовно
аеродинамічних характеристик несучого гвинта;
–
у ході проведення фізичного експерименту з несучим
гвинтом вертольота на режимі косої обдувки отримати залежності
коефіцієнта підйомної сили ty , пропульсивної сили tx та крутячого
моменту mK від коефіцієнтів режиму роботи несучого гвинта μ.
Основні теоретичні положення
Несучий гвинт вертольота призначений для створення підйомної
сили, сили тяги (пропульсивної сили) та керування вертольотом(рис.
1).
у
уa
Т
Ra
Ya
V
0
Н
Xa
хa
α НГ
х
Рис. 1. Аеродинамічні сили несучого гвинта: R – повна аеродинамічна
сила; Ya – підйомна сила; Хa – пропульсивна сила; Т – сила тяги несучого
гвинта; Н – повздовжня сила
Підйомна сила Ya урівноважує вагу вертольота G, пропульсивна
сила Xa долає силу лобового опору, а керування здійснюється зміною
величини та напряму сили тяги T несучого гвинта і, за рахунок цього,
157
158.
– створення керуючих моментів відносно трьох осей зв’язаноїсистеми координат. Таким чином, несучий гвинт вертольота виконує
функції крила, двигуна та керуючих поверхонь.
Орієнтація несучого гвинта в цілому та лопаті окремо
відносно повітряного потоку характеризується кутом атаки αнг та
кутом азимутального положення лопаті φ.
Кутом атаки несучого гвинта αнг називають кут поміж вектором
швидкості набігаючого потоку і плоскістю обертання втулки несучого
гвинта(рис. 2).
α<0
α >0
V
V
Рис. 2. До визначення кута атаки
несучого гвинта
Кутом азимутального положення лопаті ψ називають кут поміж
напрямком польоту вертольоту та повздовжньою віссю
лопаті у даний момент часу(рис. 3).
158
159.
V1800
V
ω
2700
900
ψ
ψ= 00
Рис. 3. До визначення кута азимутального
положення лопатей ψ несучого гвинта
Фізична сутність утворення тяги несучого гвинта та його
реактивного моменту пояснюється двома теоріями – ідеального
гвинта і елементу лопаті.
Згідно теорії ідеального гвинта несучий гвинт, обертаючись,
підсмоктує повітря і відкидає його за плоскість обертання із більшою
швидкістю. Сила реакції повітря, що відкидається, і є собою силу тяги
несучого гвинта.
Теорія елемента лопаті розглядає лопать як крило, здійснююче
складний рух, який залежить від режиму руху вертольоту. Кожний
елемент лопаті утворює елементарну силу тяги (проекція повної
аеродинамічної сили елемента лопаті на вісь обертання), сума яких
складає силу тяги несучого гвинта.
Система елементарних сил опору обертанню приводиться до пари
сил, момент яких називають моментом гальмування. Для подолання
моменту гальмування до гвинта необхідно прикласти крутячий
момент від двигуна.
Аеродинамічні коефіцієнти сил несучого гвинта: коефіцієнт тяги
СТ , коефіцієнт підйомної сили tya, коефіцієнт пропульсивної сили tхa,
коефіцієнт крутячого моменту mK визначаються наступними
співвідношеннями
159
160.
TT
=
=
T
π
σρω2 R 4
2
(1)
ρ(ωR )
2 4
σρω R
2
Y
(2)
ty =
π
σρω2 R 4
2
X
(3)
tX =
π
σρω2 R 4
2
MK
MK
MK
(4)
mK =
=
=
2
2
π
2 5
ρ(ωR )
ρ(ωR )
3
σρω R
FЛ iR
σπR
2
2
2
F i
У виразах (1), (2), (3), (4) : σ = Л – коефіцієнт заповнення –
F
відношення загальної площі всіх лопатей (FЛ ·i) до площі несучого
гвинта, яку він займає при обертанні (F=πR2);
ρ – щільність повітря;
ω – кутова швидкість обертання несучого гвинта;
R – радіус несучого гвинта.
Розрізняють два основних режими роботи несучого гвинта: режим
осьового обтікання, за якого αнг =±900, та режим косого обтікання, за
якого αнг ≠ ± 900.
На режимі осьового обтікання напрям повітряного потоку
співпадає з напрямом осі обертання втулки гвинта.
На режимі косого обтікання вісь конуса обертання відхиляється
від осі втулки.
Для характеристики режиму роботи гвинта запроваджується
коефіцієнт режиму роботи несучого гвинта μ. Це безрозмірна
величина, яка являє собою відношення проекції швидкості потоку на
плоскість обертання гвинта до колової швидкості кінця лопаті гвинта:
V cos α нг
(5)
µ=
ωR
Аеродинамічні коефіцієнти несучого гвинта залежать від режиму
роботи гвинта, тобто від коефіцієнта μ та кроку гвинта φ.
CT
ρ(ωR )
FЛ i
2
2
2
160
161.
Порядок виконання роботи та обробка результатівексперименту
Модель 4-х лопатевого несучого гвинта з редуктором встановлюється
в робочій частині аеродинамічної труби під заданим кутом атаки αнг
(рис. 4). Гвинтова установка (електродвигун) з приладом для
вимірювання крутячого моменту приводить в обертання модель
гвинта та урівноважує крутячий момент МК відповідним відхиленням
вантажу G на кут ψ (рис. 4а, б).
Осьове зусилля Х', еквівалентне пропульсивній силі Хa несучого
гвинта, і нормальне зусилля Y', еквівалентне підйомній силі Ya
несучого гвинта, вимірюються аеродинамічними вагами АДТ.
Для заданого кута встановлення лопатей φ та кута атаки несучого
гвинта αнг , змінюючи коефіцієнт режиму роботи гвинта μ, визначити
наступні дані:
- осьові зусилля Х', які еквівалентні пропульсивній силі Х гвинта;
- нормальні зусилля Y', які еквівалентні підйомній силі Y гвинта;
- кути Ψ відхилення вантажу G, що еквівалентні крутячому
моменту МК гвинта.
161
162.
Стренги утримуючогопристрою
Модель НГ
А
Y
Х
V
αнг
Редуктор
Робоча частина
АДТ
По А
По Б
Б
Гнучка ресора
Шкала відрахунку
кутів ψ
Б
Ψ
Гвинтовий пристрій з
приладом для
вимірювання
крутячого моменту Ванта
b
G
Рис. 4. Принципова схема експериментальної установки для визначення
аеродинамічних характеристик НГ
162
163.
По отриманим в ході експерименту значенням осьових зусиль Х',нормальних зусиль Y' та кутів Ψ розрахувати коефіцієнти
пропульсивної сили tх, підйомної сили ty, крутячого моменту mK ,
використовуючи наступні співвідношення:
X0 − X − X ′
X
;
(6)
tX =
=
π
π
σρω2 R 4
σρω2 R 4
2
2
Y ′ − Y0
Y
;
(7)
tY =
=
π
π
2 4
2 4
σρω R
σρω R
2
2
MK
2Gb
(8)
=
sin ψ .
mK =
π
π
2 5
2 5
σρω R
σρω R
2
2
У цих формулах:
Х0 та Y0 – початкові показання аеродинамічних ваг;
Хуп – сила лобового опору утримуючого пристрою
(державки) – визначається по графіку додатка 4;
Х' – поточні значення осьових зусиль;
Y' – поточні значення нормальних зусиль;
Ψ – поточні значення кутів відхилення вантажу, який
урівноважує крутячий момент.
Коефіцієнт режиму роботи несучого гвинта
визначається в
залежності від швидкості повітряного потоку в аеродинамічній
трубі(контролюється показаннями мікроманометру):
2
(α − α 0 )Kc
ρ
V cos α нг
(9)
µ=
=
cos α нг
ωR
ωR
За
результатами
розрахунків
побудувати
залежності
аеродинамічних коефіцієнтів ty , tx , mK від коефіцієнтів режиму
роботи несучого гвинта μ, якісний вигляд яких надано на рис. 5.
У висновках по роботі слід проаналізувати характер зміни
побудованих залежностей та пояснити фізичну сутність впливу на них
коефіцієнту режиму роботи.
(
163
)
164.
txatya
mK
ty
0.4
0.2
mK
tx
0
0.2
0.4
0.6
μ
Рис. 5. Залежності аеродинамічних характеристик несучого гвинта від
коефіцієнту режиму роботи
Питання для самоконтролю
1. Поясніть призначення та принцип роботи несучого гвинта
вертольоту.
2. Назвіть основні геометричні параметри несучого гвинта.
3. Назвіть основні кінематичні характеристики несучого гвинта.
4. Що розуміють під кутом атаки несучого гвинта ?
5. Яка лопать зветься наступаючою, а яка – відстаючою ?
6. Як створюється тяга несучого гвинта?
7. Чому виникає реактивний момент при обертанні несучого гвинта
?
8. Яким чином здійснюється компенсація реактивного моменту ?
9. За яким принципом здійснюється класифікація вертольотів ?
10. Що розуміють під підйомною силою несучого гвинта ?
11. Що таке пропульсивна сила несучого гвинта ? Як вона
визначається ?
12. Написати та пояснити формулу крутячого моменту. В чому
полягає сутність режиму осьового обтікання несучого гвинта ?
13. Охарактеризуйте режим косого обтікання несучого гвинта.
14. Назвіть режими польоту, які відповідають режиму осьового
обтікання несучого гвинта.
164
165.
15. Чим пояснюється маховий рух лопатей НГ ?16. З якою метою застосовується шарнірне кріплення лопатей ?
17. З якою метою застосовується горизонтальний шарнір лопаті
несучого гвинта ?
18. З якою метою застосовується осьовий шарнір лопаті несучого
гвинта ?
19. Показати та пояснити зони, пов’язані із критичними режимами
обтікання НГ.
20. Що таке коефіцієнт режиму роботи НГ ?
21. Як здійснюється управління вертольотом класичної схеми по
крену ?
22. Як здійснюється управління вертольотом у курсовому каналі
(класична схема) ?
23. Як здійснюється управління вертольотом співосної схеми у
курсовому каналі ?
24. Розкажіть порядок виконання лабораторної роботи по
визначенню аеродинамічних характеристик НГ.
165
166.
ЛАБОРАТОРНА РОБОТА 20.ВИЗНАЧЕННЯ АЕРОДИНАМІЧНИХ ХАРАКТЕРИСТИК
ЛІТАКА ПРИ НЕСТАЛОМУ РУСІ
Мета роботи – розкрити фізичну сутність несталого руху літака на
прикладі повздовжнього демпфірування;
– закріпити знання основних теоретичних положень щодо
аеродинамічних сил та моментів при несталому русі;
– визначити коефіцієнт повздовжнього демпфуючого моменту при
коливанні моделі літака відносно поперечної осі. Отриманий
результат порівняти з даними натурних випробувань.
Основні теоретичні положення
Повздовжній момент, який діє на літак при несталому русі, можна
записати як функціональну залежність від кінематичних параметрів,
які визначають рух літака та є функціями часу:
M z = M z (V ;
dω y
dωx
dω z
dV
dα
dβ
; α;
; β;
; ωx ;
;ω y ;
; ωz ;
..t.) .
dt
dt
dt
dt
dt
dt
(1)
На літаку відхиляються рульові поверхні, виникають деформації
планеру під впливом повітряних навантажень. Це також впливає на
величину аеродинамічних сил та моментів.
У розглянутому випадку повздовжні коливання моделі
виконуються при V=const, β=0, ωх=0, ωу=0.
В такому разі залежність (1) запишеться у вигляді:
M z = M z (V ; α ;
dωz
dα
; ωz ;
).
dt
dt
(2)
Коефіцієнт повздовжнього моменту, який визначається за звісною
формулою,
mz =
Mz
ρV 2
S ba
2
166
167.
для випадку, що розглядається, та з урахуванням виразу (2) можназаписати у вигляді
ωz
α
mz =
mz 0 + mαz α + mz α + mz
де
ω z
ω z + mz ω z , (3)
α , ω z , ω z − безрозмірні кінематичні параметри
ba
dω z ba 2
dα ba
; ω z ω=
; ωz
( ) ...
=
=
z
α
V
Оскільки в експерименті, який проводиться, α = ω z та mz = 0 ,
0
dt V
V
dt
то, нехтуючи останнім членом формули (3), запишемо:
ωz
α
mz = mαz α + ( mz + mz )α ,
ωz
де mz
та
(4)
α
mz − коефіцієнти повздовжнього демпфіруючого
моменту.
Фізична сутність та значення демпфіруючих якостей літака
полягає в наступному.
Якщо робота, яку виконують аеродинамічні сили, діючі на літак у
продовж одного періоду коливального руху, відрізняються від нуля і
позитивні, то енергія літака в процесі коливань збільшується, а
коливання будуть незатухаючими, тобто літак в такому русі
нестійкий.
Навпаки, при негативній роботі аеродинамічних сил запас енергії
літака зменшується в процесі коливань, коливання затухають, а літак
з часом повертається до початкового режиму польоту, тобто він –
динамічно стійкий. Для того, щоб коливання були затухаючими(запас
енергії літака зменшується), необхідно, щоб сума коефіцієнтів
ωz
mz
та
α
mz
у формулі (4) була від'ємною, тобто
ωz
( mz
α
+ mz ) < 0 .
(5)
Вираз (5) є умовою демпфірування повздовжнього руху літака.
Повздовжній демпфуючий момент створюється в основному
горизонтальним оперенням.
167
168.
При обертанні літака (рис. 1) навколо осі 0z1 з кутовою швидкістюωz горизонтальне оперення, віддалене від центру тяжіння на відстань
lго, набуває додаткову вертикальну швидкість Vy. кут атаки
горизонтального оперення також змінюється на деяку величину Δα,
внаслідок чого буде змінюватися на ΔYго підйомна сила
горизонтального оперення. Приріст підйомної сили ΔYго викликає
відносно центру тяжіння додатковий повздовжній момент ΔМzго, який
перешкоджає обертанню літака(повздовжній демпфіруючий момент).
y1
ωz
ЦТ
ΔYГО
ΔMz ГО
ΔαГО
VГО
Vу
x1
Vіст ГО
L ГО
Рис. 1. Схема виникнення повздовжнього демпфуючого моменту
Окрім горизонтального оперення, повздовжній демпфуючий
момент аналогічним чином утворюють крило та фюзеляж літака,
однак величина його порівняно невелика.
У формулі (4) коефіцієнт m zω z повздовжнього демпфуючого
моменту визначається обертанням літака навколо осі 0z1 із кутовою
швидкістю ωz , як це показано вище.
Коефіцієнт m za визначається запізненням скосу потоку від крила.
Скіс потоку за крилом зменшує кут атаки горизонтального оперення
на величину скосу ε, тобто знижує ефективність горизонтального
оперення. Однак, при несталому русі збурення, які викликані крилом,
досягають горизонтального оперення не миттєво, а з деяким
запізненням у часі (на Δt). Величина запізнення залежить від відстані
– lго – і швидкості Vго, з якою рухається нестаціонарна вільна вихрова
пелена від крила до горизонтального оперення. Тому кут скосу потоку
ε в області горизонтального оперення буде визначатись не тим кутом
атаки α, який має крило у даний момент часу t, а кутом атаки, який
168
169.
був у момент часу (t – Δt). Якщо той кут атаки був меншим за α, тоскіс потоку буде меншим, а ефективний кут атаки горизонтального
оперення внаслідок такого запізнення скосу потоку опиниться
більшим проти очікуваного для сталого руху. Значить, на
горизонтальному оперенні буде мати місце додаткова підйомна сила у
порівнянні зі сталим рухом, яка викликає відносно центру тяжіння
момент, зменшуючий кут атаки, тобто повздовжній демпфуючий
момент, пропорційний m za .
Окрім горизонтального оперення, повздовжній демпфуючий
момент від запізнення скосу потоку утворюється крилом.
Нестаціонарна вільна вихрова пелена, яка сходить з крила при
зміні кута атаки, викликає на ньому додаткові скоси, які змінюють
розподіл аеродинамічних сил на крилі. виникаючий при цьому
повздовжній момент, як правило, зменшує демпфуючий момент
горизонтального оперення, тобто є демпфуючим.
Коефіцієнт m za , обумовлений запізненням скосу потоку, за
абсолютною величиною менший за коефіцієнт m zω z .
Визначимо коефіцієнт повздовжнього демпфуючого моменту
ωz
m z + m za , записавши рівняння повздовжнього вимушеного
збуреного руху моделі літака у вигляді:
(
Iz
)
d 2 ∆ϑ
d 2 ∆α
I
=
=∑ M z =M z aeр + M z пруж + M z тертя (6)
z
dt 2
dt 2
Проаналізуємо праву частину виразу (6).
Повздовжній момент аеродинамічних сил, як звісно, можна
записати у вигляді суми сталої та несталої складових:
ρV2
M z аерод =M z cт + M z нест =(mz ст + mz нест )
S ba
2
або
ρV
M z аерод =M z cт + M z нест = mαz ∆α + (mωz z + mαz )α
S ba
2
2
(7)
169
,
170.
деmz cт = mαz ∆α ;
mz нест =(mωz z + mαz ) α =(mωz z + mαz )
Момент, який створюється пружиною, дорівнює
d ∆α ba
dt V
M z пруж = − K 2 R ∆α ,
.
(8)
де: К – коефіцієнт, який характеризує жорсткість пружини;
R – плече, на якому прикладене зусилля від пружини.
Момент, який утворюється силами тертя в опорах моментного
приладу, записується у вигляді:
Mz
тертя
= −µ 2
d ∆α
dt
, (9)
де μ – коефіцієнт тертя в опорах.
Тоді рівняння (6) з урахуванням виразів (7), (8), (9) прийме вигляд:
2
d 2 ∆α α
d ∆α
ωz
α d ∆α ba ρ V
(10)
Iz =
m
m
S ba − K 2 R ∆α − µ 2
∆α + ( m
+
)
z
z
2
z
dt
dt V 2
dt
Після того, як рівняння (10) розділимо на момент інерції моделі
літака і частин, що обертаються – Iz та очевидних перетворень
отримаємо диференційне рівняння у вигляді:
d 2 ∆α
d ∆α
ξ
−
2
+ Ω 2 ∆α = 0 , (11)
2
dt
dt
2
1 2
ωz
α ρ V
− µ − ( m z + mz )
S ba ;
де : 2ξ =
Iz
2
2
1 2
α ρ V
S ba ) .
Ω = ( K R − mz
Iz
2
2
(12)
(13)
Загальне розв’язання диференційного рівняння (11) має вигляд
=
∆α
Beξ t sin( Ω 2 − ξ 2 t + c)
(14)
170
171.
Із виразу (14) слідує, що зміна кута атаки здійснюється посинусоїді із змінною амплітудою A = Be ξ t . Це дозволяє за
декрементом затухання D =
1
e
визначити коефіцієнт затухання
−ξ t
коливань ξ, який пов’язаний виразом (12) з коефіцієнтом
повздовжнього демпфуючого моменту m zωz + m za .
Запишемо вираз для коефіцієнту повздовжнього демпфуючого
моменту, скористувавшись рівністю (12):
4 I ξ + 2μ 2
.
(15)
m zω z + m za = z
ρVSba2
Оскільки врахування тертя при обертанні моделі літака доволі
ускладнений, намагаються максимально зменшити тертя в опорах і
його не враховувати, вважаючи μ=0. Тоді рівняння (15) прийме
остаточний вигляд;
4I z ξ
.
(16)
m zω z + m za =
ρVSba2
Це і є розрахункова формула для визначення в експери- менті
коефіцієнта повздовжнього демпфіруючого моменту моделі літака
при несталому русі.
(
(
)
(
)
)
Порядок виконання роботи та обробка результатів
експерименту
Аеродинамічні характеристики моделі літака при несталому русі
визначаються в аеродинамічній трубі.
Модель літака закріплена у моментному приладі (рис. 2) таким
чином, що вісь Оz1 моделі спрямована вертикально. Це дає
можливість змоделювати повздовжні коливання моделі і така
орієнтація в потоці виключає вплив сили тяжіння на амплітуду її
коливань.
171
172.
О z1ωz
Модель літака
V
Вантажі
Пружини
Повзунок
потенціометру
Поворотний диск
+
−
Осцилограф
Рис. 2. Схема експериментальної установки по визначенню
аеродинамічних характеристик моделі літака при несталому русі
Для дослідження коливання моделі літака відносно осі Оz1 нижня
частина моментного приладу(поворотний диск з жорстко
закріпленими вантажами та пружинами) поєднана із повзунком
потенціометру. Зміна напруги при коливанні моделі(разом із
повзунком) записується осцилографом. Вантажі на моментному
приладі збільшують момент інерції Iz моделі з моментним приладом, а
172
173.
закріплені до моментного приладу пружини збільшують частотуωb
коливань. Величина безрозмірної кутової швидкості ω z = z a
V
наближається при цьому до реального значення. Покращуються також
умови обробки результатів експерименту та порівняння їх з даними
натурних випробувань.
При проведенні експерименту в аеродинамічній трубі проводяться
три продувки з одночасним записом на осцилограмі коливального
процесу (рис. 3) за наступною програмою:
1. Продувка повної моделі літака для визначення суми
коефіцієнтів m zωz + m za ;
(
)
2. Продувка моделі літака без горизонтального оперення для
визначення коефіцієнту m zω z кр ;
3. Продувка моделі літака без крила для визначення коефіцієнту
m zω z го .
Коефіцієнт затухання коливань ξ визначається по декременту
затухання D, який являє собою співвідношення амплітуд через період
Т (дивись рис. 3):
A
1
−ξT
(17)
= K = e сер = tgϕ .
D AK + 2
Значення коефіцієнту затухання ξ визначаємо, логарифмуючи
співвідношення (17):
2.303
(18)
ξ=−
lgtgϕ
Tсер
1 n
∑ Ti − осереднене значення періоду коливань.
n i =1
Обробка результатів експерименту полягає у наступному.
Користуючись співвідношенням (16), знаходимо коефіцієнти
m zωz + m za , m zω z кр , m zω z го та визначаємо складові коефіцієнту
де Tсер =
(
)
повздовжнього демпфірую чого моменту:
m zωz = m zωz кр + m zωz го ;
173
174.
)(
m za = m zωz + m za − m zωz
Відбитки часу
Т
А1
А2
А4
А3
А5
Рис. 3. Схема осцилограми експерименту для визначення декременту
затухання D та періоду коливань моделі літака T
Момент інерції моделі літака Iz надається у готовому вигляді.
Отримані значення коефіцієнтів повздовжнього демпфуючого
моменту моделі літака необхідно порівняти з відповідними
значеннями коефіцієнтів літака, модель якого використовувалась в
експерименті. Так для літака, наданому на рис. 2 коефіцієнт
m zωz + m za = −3.4 .
У висновках необхідно відобразити вплив аеродинамічних
поверхонь літака на демпфірування повздовжніх коливань.
(
)
Питання для самоконтролю
1. Який рух літака вважається несталим ?
2. Якими кінематичними параметрами визначається несталий рух ?
3. Записати вираз для підйомної сили або її коефіцієнту при несталому
русі літака.
4. Від чого залежить коефіцієнт повздовжнього моменту несталого
руху літака ?
5. Поясніть фізичну сутність повздовжнього демпфірування літака.
174
175.
6. Напишіть вираз, який являє собою умову демпфірування літака уповздовжньому русі.
7. Від чого залежать демпфіруючи властивості літака у
повздовжньому русі ?
8. Яка поверхня є основною у створені повздовжнього демпфуючого
моменту ?
9. Як впливають площа та плече горизонтального оперення на
величину демпфуючого моменту ?
10. Розкажіть принцип роботи експериментальної установки по
11. визначенню аеродинамічних характеристик моделі літака при
12. несталому русі
13. Як визначається період коливань моделі ?
14. Розкажіть про порядок виконання роботи.
175
176.
Додаток 1.1,0132+5
9,5461+4
8,9876+4
7,9501+4
7,0121+4
6,1660+4
5,4048+4
4,7217+4
4,1105+4
3,5651+4
3,0800+4
2,6499+4
2,2699+4
1,9399+4
1,225+0
1,167+0
1,111+0
1,006+0
9,092-1
8,193-1
7,364-1
6,601-1
5,900-1
5,257-1
4,670-1
4,135-1
3,648-1
3,119-1
1,000
9,76-1
9,52-1
9,06-1
8,61-1
8,17-1
7,75-1
7,34-1
6,94-1
6,55-1
6,17-1
5,80-1
5,45-1
5,04-1
172
Прискорення
свобідного
падіння
g, м/с²
Щільність ρ,
кг/м³
288,15
284,90
281,65
275,15
268,65
262,16
255,67
249,18
242,70
236,21
229,73
223,25
216,77
216,67
В’ язкість
кінематична
υ м²/с
Тиск
p , Па
0
500
1000
2000
3000
4000
5000
6000
7000
8000
9000
10000
11000
12000
ρH
ρ0
В’ язкість
динамічна
μ, Па*с
Температура T,
K
∆=
Швидкість
звуку
a, м/с
Геометрична
висота H,м
МІЖНАРОДНА СТАНДАРТНА АТМОСФЕРА
/ГОСТ 4401-81/
340,2
338,3
336,4
332,5
328,5
324,5
320,5
316,4
312,3
308,1
308,8
299,5
295,1
295,1
1,7894-5
1,7737-5
1,7579-5
1,7260-5
1,6938-5
1,6612-5
1,6282-5
1,5949-5
1,5612-5
1,5271-5
1,4926-5
1,4577-5
1,4223-5
1,4216-5
1,46-5
1,52-5
1,58-5
1,71-5
1,86-5
2,03-5
2,21-5
2,41-5
2,64-5
2,90-5
3,19-5
3,52-5
3,90-5
4,56-5
9,8066
9,8051
9,8036
9,8005
9,7974
9,7943
9,7912
9,7882
9,7851
9,7820
9,7789
9,7759
9,7728
9,7099
177.
173178.
179.
Додаток 2ν см2/с
720
740
760
780
0.16
0.15
0.14
0.13
0.12
0.11
-10
0
+10
t0 C
+20
Залежність коефіцієнту в’язкості повітря ν від тиску та температури
Додаток 3
ρ кг/м3
1.48 0.15
1.38 0.14
1.28 0.13
780
760 мм
740 рт.
720 ст.
700
1.18 0.12
1.08 0.11
ρ кгс2/м4
-10
-5
0
+5
+10
+15
+20
+25
+30
t0 C
Графік для визначення щільності повітря в залежності від
атмосферного тиску та температури
173
180.
Додаток 4ΔХ ,кг
0.15
0.1
0.05
0
50
(а-а0) • k, мм
К
. Тарувальний графік залежності сили лобового опору
утримуючого пристрою ΔХ від швидкісного напору q=(aa0)k (у показаннях мікроманометру)
Додаток 5
174
181.
AB
Г
Δ
E
Z
H
Θ
I
K
Λ
M
α
β
γ
δ
ε
ζ
η
θ
ι
κ
λ
μ
alpha
beta
gamma
delta
epsilon
zeta
eta
theta
iota
kappa
lambda
mu
☺
☻
☼
☺
☻
☺
☼
☺
☻
☼
☺
☻
N
Ξ
O
П
P
Σ
T
Y
Ф
X
Ψ
Ω
ν
ξ
ο
π
ρ
σ
τ
υ
φ
χ
ψ
ω
nu
xi
omicron
pi
rho
sigma
tau
upsilon
phi
chi
psi
omega
Грецький алфавіт(великі та малі літери) з англійським прочитанням
175
182.
Додаток 6КАФЕДРА АЕРОДИНАМІКИ ТА БЕЗПЕКИ ПОЛЬОТІВ ЛА
Звіт з лабораторної роботи:
"ВИЗНАЧЕННЯ АЕРОДИНАМІЧНИХ ХАРАКТЕРИСТИК
ПОВІТРЯНИХ ГВИНТІВ"
студента ________н.гр. ФЛА АКІ
___________________________
(прізвище, ініціали )
МЕТА РОБОТИ____________________________________________
__________________________________________________________
__________________________________________________________
__________________________________________________________
__________________________________________________________
__________________________________________________________
ОБ'ЄКТ ДОСЛІДЖЕННЯ : __________________________________
ОБЛАДНАННЯ ТА ВИМІРЮВАЛЬНА АПАРАТУРА:__________
__________________________________________________________
__________________________________________________________
УМОВИ ЕКСПЕРИМЕНТУ: Ратм ____Па; Т ____ 0К; ρ ____ кг/м3;
υ_____ м2/с; К ______ ; D _____ м; nc _____ об/с ; φ______ град;
Gb _____ кГсм;
___________ ;
__________ ; ___________ ;
176
183.
СХЕМА УСТАНОВКИПо А
По Б
Шкала відрахунку
кутів ψ
Б
Б
Гнучка ресора
Вантаж
Гвинтовий пристрій з
приладом для
вимірювання крутячого
моменту
V
ФІЗИЧНА МОДЕЛЬ ЯВИЩА
dX
dR
V
ψ
dP
β
α
φ
W
Обертаючий момент від
Vrдвигуна на вал обертання
повітряного гвинта
V
Утворення сили тяги dP та лобового опору dX
на елементі лопаті повітряного гвинта
177
b
G
184.
РОЗРАХУНКОВІ ФОРМУЛИ=
α
P
=
ρ nc2 D 4
( X 0 + X у .пр ) − X ′
=
ρ nc2 D 4
X
=
c1 X ,
ρ nc2 D 4
Х = ( Х0 + Хутр. пр. ) – Х ;
1
1
=
=
c1 =
;
2 4
кГс
ρ nc D
=
β
N
=
ρ nc3 D 5
с2 =
2G b sinψ 2π nc
MK •ω
=
= с2 sinψ ;
ρ nc3 D 5
ρ nc3 D 5
4π G b
ρ nc2 D 5
2
V
λ =
=
nc D
ρ
η=
,
(a − a0 ) K c
= с3 (а − а0 )
nc D
2
с3 ==
ρ
Kc
nc D
178
.
α
λ
β
.
185.
ПРОТОКОЛ ЕКСПЕРИМЕНТУХ утр.пр =_________ кГс.
а0 =_________
№
п/
п
Параметри
1
а
2
(а – а0)
№
заміру
1
2
3
(a − a0 )
3
4
λ
5
Х′
6
Хутр. пр.
7
Х=(Х+Хутр пр.)–Х′
8
α
9
ψ
10
sin ψ
11
β
12
η
, град.
179
4
5
6
7
8
9
10
186.
ВИСНОВКИПідпис виконавця _________
Робота
зарахована_________________
(підпис викладача, дата)
Додаток 7
α, β
η
0.2
0.5
φ = const
β
η
α
0.1
0.25
0
0.4
0.8
1.2
А
В λ
Графік нормальних характеристик повітряного гвинта
Примітка: Графіки за результатами проведеного у лабораторній
роботі
експерименту виконуються на окремому
аркуші міліметрового паперу розміром А4 або А5(в
залежності від кількості та розмірів графіків) простим
олівцем. Надписи червоного кольору робити
забороняється. Обов'язково наносити точки, отримані
в експерименті . Усереднююча крива проводиться за
правилами апроксимації і повинна відповідати
дійсному закону зміни досліджуваної величини.
180
187.
ЛІТЕРАТУРА1. Ништ М.И. Аэродинамика летательных аппаратов и гидравлика
их систем. –М., ВВИА им. проф. Н.Е. Жуковского, 1980.
2. Горлин С.М. Экспериментальная аэромеханика. –М., "Высшая
школа", 1970.
3. Горлин С.М., Слезингер И.И. Аэромеханические измерения. –
М.: Наука, 1964. – 720 с.
4.
Бонч-Бруевич Г.Ф., Майборода А.Н. Руководство к
лабораторным
занятиям
по
дисциплине
"Аэродинамика
летательных аппаратов и гидравлика их систем". Киев, КВВАИУ,
1985.
5. Руководство к лабораторным и практическим занятиям по
дисциплине "Аэродинамика летательных аппаратов и гидравлика
их систем". Под ред. Г.А. Колесникова. –М.:ВВИА им. проф. Н.Е.
Жуковского, 1975.
6. Трюхан О.Н. Принципы полета. –Киев: НАУ, 2011. –420 с.
7. Альбом течений жидкости и газа: Пер. с англ./Сост. М. ВанДайк. – М.: Мир, 1986. – 184 с.
8. Горшенин Д.С. Руководство к практическим занятиям в
аэродинамической лаборатории. – М.: Машиностроение, 1967. –
224 с.
9. С.А., Трюхан О.Н. Принципы полета (альбом графиков, схем,
таблиц по курсу дисциплины). –Киев: НАУ, 2010. –100 с.
10. Лабораторный практикум / Под ред. С.Г. Попова. – М.: МАИ,
1972. – 115 с.
11. Соляник П.Н., М.Л. Сургайло, В.В. Чмовж. Экспериментальная
аэродинамика. Учебное пособие по лабораторному практикуму.
–Харьков: Нац. аэрокосм. ун-т "Харьковский. авиационный
институт", 2007. – 96 c.
12. Мельников А.П. Основы прикладной аэродинамики. – Л.:
ЛКВВИА, 1953. – 580 с.
181