


Similar presentations:










Презентация_Инженеры_Будущего_Калинина_Тюрина
1.
Государственное бюджетное общеобразовательноеучреждение города Москвы «Школа №2033»
Робот-помощник для
выгула собак «Ami-Bot»
Участники:
Ученица 10 «Т» класса ГБОУ Школа №2033 Калинина
Алиса Алексеевна
Ученица 10 «Т» класса ГБОУ Школа №2033 Тюрина
Анастасия Павловна
Руководитель:
Педагог ГБОУ Школа №2033 Коняшкин Дмитрий
Александрович
Москва, 2025
2.
АктуальностьПроект «Ami-Bot» актуален, т.к. данный робот-выгульщик решает
значимую социальную задачу, обеспечивая возможность полноценного
выгула домашних питомцев для маломобильных групп населения, включая
пожилых людей и лиц с ограниченными возможностями, для которых
подобные физические нагрузки затруднительны или невозможны, а также
просто для переутомлённых владельцев. С технологической точки зрения
проект соответствует растущей популярности на автоматизацию ухода за
домашними животными.
3.
Какую проблему решает проект?⮚Экономия сил и времени при выгуле домашних животных
⮚Возможность пенсионерам и людям с ограниченными
возможностями провести время на улице со своим любимцем
⮚Обеспечение качественной физической нагрузки для питомцев,
решение проблемы гиподинамии
⮚Развитие игрового поведения у домашних животных
4.
Целевая аудиторияОсновной целевой аудиторией данного проекта:
⮚ Владельцы домашних животных, занятые работающие и преутомленные
люди
⮚ Маломобильные группы населения, включая пенсионеров и лиц с
ограниченными возможностями здоровья
5.
Цель работыРазработать и создать автономное роботизированное устройство для
активного и полноценного выгула собак на огороженных площадках.
6.
Задачи работы1. Проанализировать целевую аудиторию, аналоги и конкурентов
2. Проанализировать условия работы устройства, его размеры и
необходимые функции
3. Смоделировать устройство
4. Разработать прочный корпус, устойчивый к механическим
воздействиям
5. Сконструировать робота, установить датчики
6. Разработать необходимую программу и написать код
7. Проверить робота на надёжность и безопасность
8. Проанализировать методы продвижения проекта
7.
Аналоги и конкуренты⮚GoBone от PulsePet
⮚iFetch
⮚PetSafe Automatic Ball Launcher
8.
Анализ предметной областиПредметная область нашего проекта представляет собой
современный, технологичный подход к выгулу домашнего питомца и
включает в себя робототехническую и кинологическую
составляющую.
Необходим анализ:
⮚ Условий, в которых будет работать устройство
⮚ Оптимального размера робота
⮚ Поведенческих особенностей собак для разработки эффективных
функций устройства
9.
Инструменты разработкиДля создания проекта использовались:
⮚ Два мотора-редуктора 1:48; три лазера дальномера, драйвер моторов, макетная
плата, пьезодинамик, комплект шасси Smart Robot, микроконтроллер Arduino
Leonardo, батарея крона
⮚ Приложение Blender для создания модели корпуса, 3Д принтер для печати
⮚ Язык программирования C++
10.
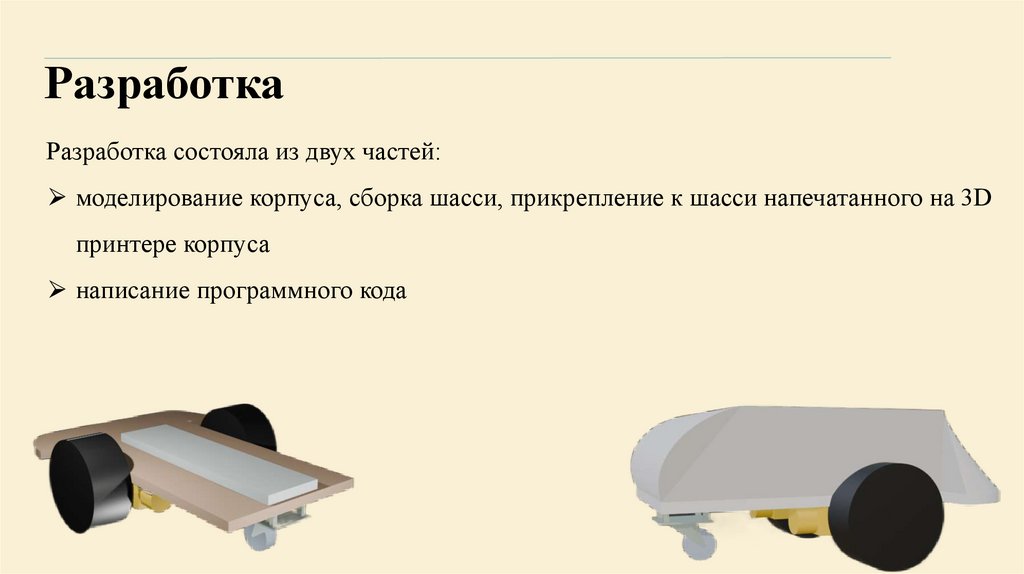
РазработкаРазработка состояла из двух частей:
⮚ моделирование корпуса, сборка шасси, прикрепление к шасси напечатанного на 3D
принтере корпуса
⮚ написание программного кода
11.
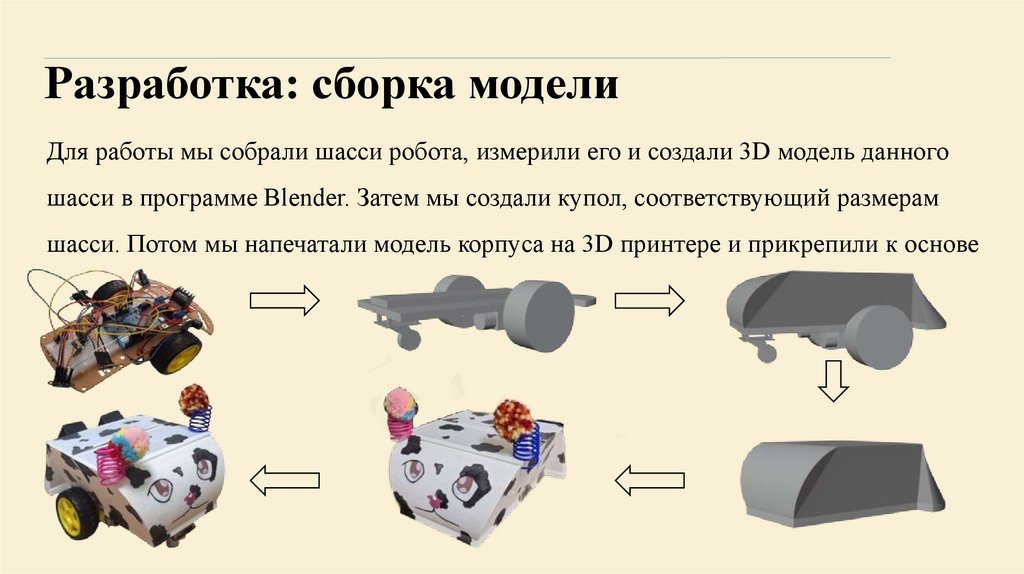
Разработка: сборка моделиДля работы мы собрали шасси робота, измерили его и создали 3D модель данного
шасси в программе Blender. Затем мы создали купол, соответствующий размерам
шасси. Потом мы напечатали модель корпуса на 3D принтере и прикрепили к основе
12.
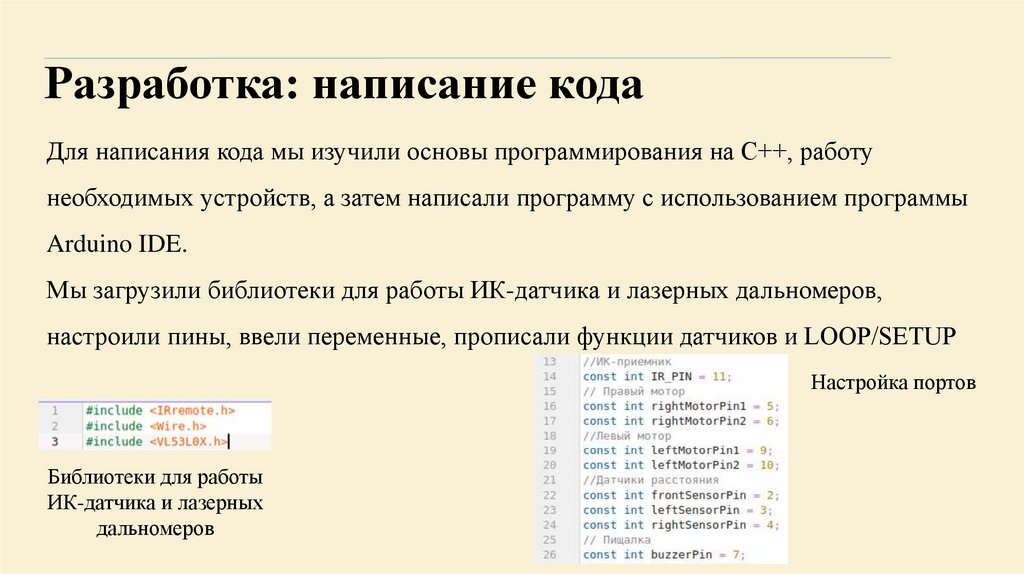
Разработка: написание кодаДля написания кода мы изучили основы программирования на C++, работу
необходимых устройств, а затем написали программу с использованием программы
Arduino IDE.
Мы загрузили библиотеки для работы ИК-датчика и лазерных дальномеров,
настроили пины, ввели переменные, прописали функции датчиков и LOOP/SETUP
Настройка портов
Библиотеки для работы
ИК-датчика и лазерных
дальномеров
13.
Результат работыРезультат работы - мобильный робот на трёх колёсах “Ami-bot”, способный
автономно передвигаться по огороженной местности и включаться с ИК-пульта.
14.
План развитияДоработка дизайна, создание более прочного корпуса и более обтекаемой формы.
Разработка функции возвращения и выключения при помощи пульта дистанционного
управления для более удобного использования “Ami-bot”. Доработка функции
пьезодинамика
15.
Спасибо завнимание!