




 informatics
informaticsSimilar presentations:










Разработка робота, следующего по линии, на базе Arduino
1. Разработка робота, следующего по линии, на базе Arduino
• Учебный проект по информатике• Автор: Софиянчук Федор Романович
• Класс 9-К
• МБОУ ЯСШЛ N9
2.
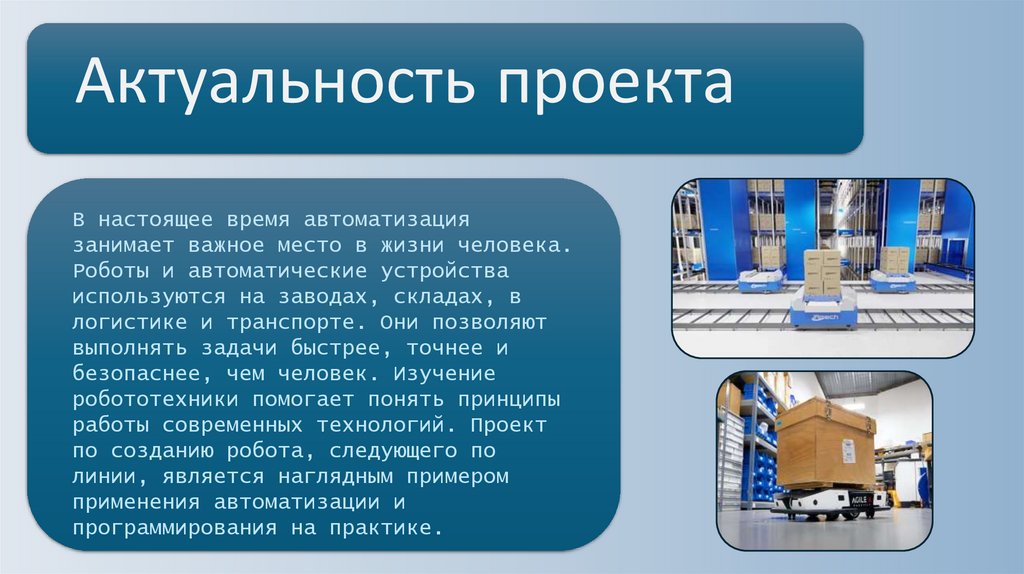
Актуальность проектаВ настоящее время автоматизация
занимает важное место в жизни человека.
Роботы и автоматические устройства
используются на заводах, складах, в
логистике и транспорте. Они позволяют
выполнять задачи быстрее, точнее и
безопаснее, чем человек. Изучение
робототехники помогает понять принципы
работы современных технологий. Проект
по созданию робота, следующего по
линии, является наглядным примером
применения автоматизации и
программирования на практике.
3.
ПроблемаРучное управление транспортными
устройствами требует постоянного
внимания человека. При длительной
работе возможны усталость, ошибки
и снижение эффективности. Поэтому
возникает необходимость создания
автономных устройств, которые
могут самостоятельно двигаться по
заданному маршруту без участия
человека. Такие системы позволяют
снизить влияние человеческого
фактора и повысить точность
выполнения задач.
4.
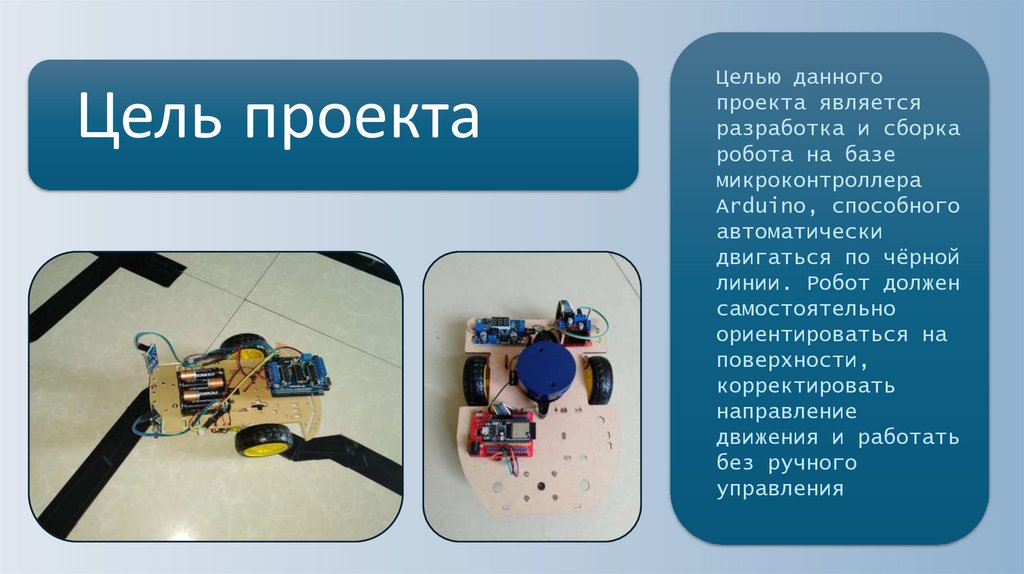
Цель проектаЦелью данного
проекта является
разработка и сборка
робота на базе
микроконтроллера
Arduino, способного
автоматически
двигаться по чёрной
линии. Робот должен
самостоятельно
ориентироваться на
поверхности,
корректировать
направление
движения и работать
без ручного
управления
5.
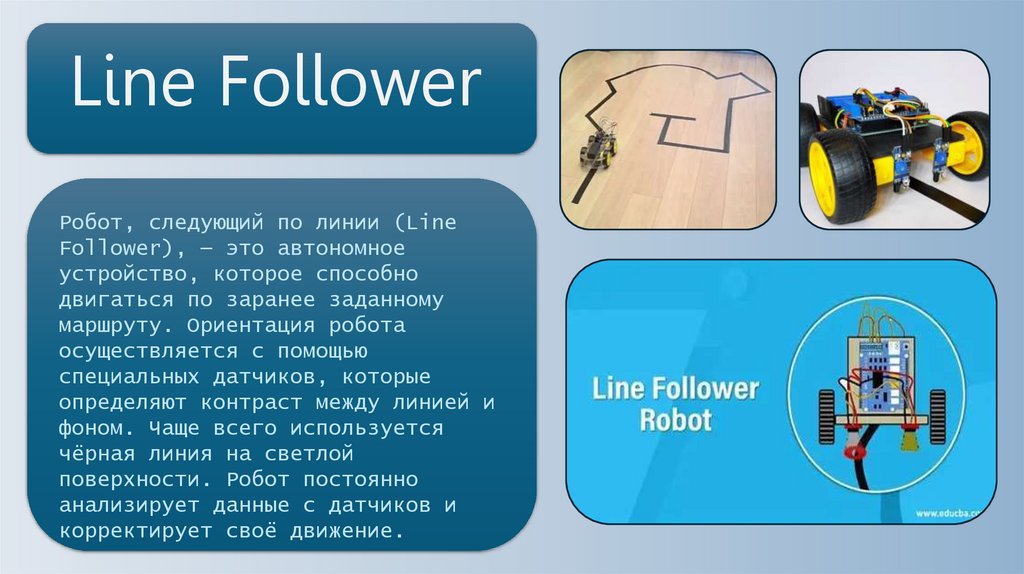
Line FollowerРобот, следующий по линии (Line
Follower), — это автономное
устройство, которое способно
двигаться по заранее заданному
маршруту. Ориентация робота
осуществляется с помощью
специальных датчиков, которые
определяют контраст между линией и
фоном. Чаще всего используется
чёрная линия на светлой
поверхности. Робот постоянно
анализирует данные с датчиков и
корректирует своё движение.
6.
Используемые компонентыДля создания робота были
использованы следующие
компоненты: Микроконтроллер
Arduino Uno, который управляет
всей системой; инфракрасные
датчики линии, определяющие цвет
поверхности; двигатели и колёса,
обеспечивающие движение; мотордрайвер для управления скоростью
и направлением вращения
двигателей; источник питания;
корпус для крепления всех
элементов конструкции.
7.
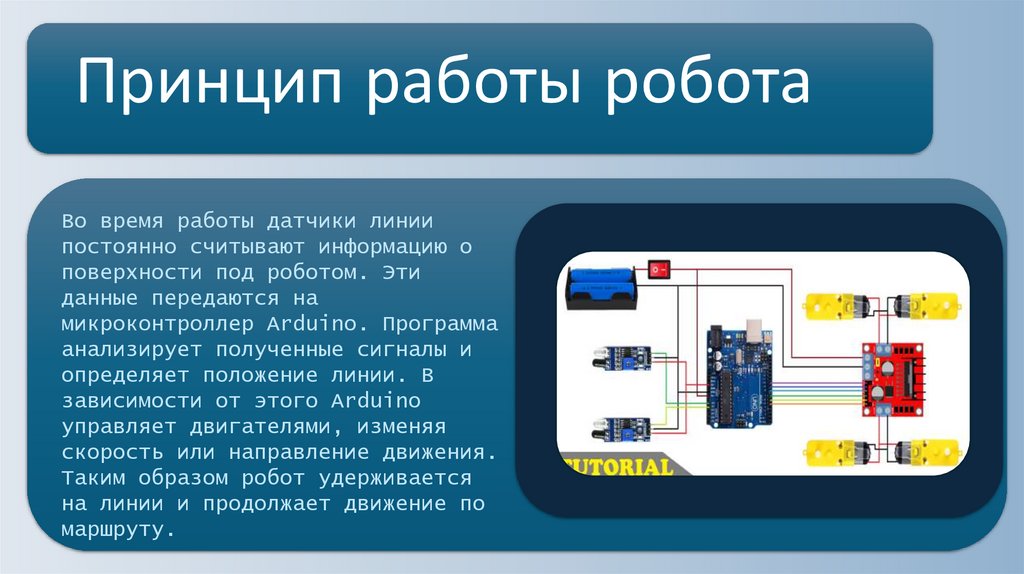
Принцип работы роботаВо время работы датчики линии
постоянно считывают информацию о
поверхности под роботом. Эти
данные передаются на
микроконтроллер Arduino. Программа
анализирует полученные сигналы и
определяет положение линии. В
зависимости от этого Arduino
управляет двигателями, изменяя
скорость или направление движения.
Таким образом робот удерживается
на линии и продолжает движение по
маршруту.
8.
Программная частьПрограмма для робота написана
в среде Arduino IDE. В коде
реализована обработка
сигналов с датчиков линии и
управление двигателями. В
зависимости от показаний
датчиков робот может
двигаться прямо, поворачивать
влево или вправо. Программа
работает в цикле, что
позволяет роботу постоянно
корректировать своё положение
относительно линии.
9.
Областиприменения
Подобные роботы используются в различных сферах: на
автоматизированных складах для перемещения грузов; на
производственных линиях и конвейерах; в системах сортировки; в
учебных и исследовательских целях; как основа для создания более
сложных автономных роботов и беспилотных систем
10.
ВыводВ ходе работы над проектом была изучена тема робототехники и
автоматизации движения. Рассматривались принципы работы
автономных устройств, которые могут ориентироваться без участия
человека. В качестве примера был выбран робот, следующий по
линии, так как он наглядно показывает взаимодействие датчиков,
микроконтроллера и программы управления. Были изучены основные
возможности микроконтроллера Arduino, принципы работы датчиков
линии и двигателей. Также было рассмотрено, как программное
обеспечение обрабатывает сигналы с датчиков и управляет
движением устройства. Это помогло понять, как простые алгоритмы
позволяют реализовать автономное поведение робота. Данный
проект позволил получить теоретические знания и подготовиться к
практической реализации. Полученный опыт может быть использован
для дальнейшего изучения робототехники и создания более сложных
автоматизированных устройств.
11.
Списоклитерату
ры