
 informatics
informaticsSimilar presentations:










Алгоритм движения робота вдоль линии на полу
1.
Государственное профессиональное бюджетное образовательноеучреждение
«Челябинский радиотехнический техникум»
Групповая презентация
Тема презентации: «Алгоритм движения
робота вдоль линии на полу »
Авторы работы:
Мачикин Никита,
Баймаков Артем,
Кокшаров Кирилл,
обучающиеся группы: Пр-165
2.
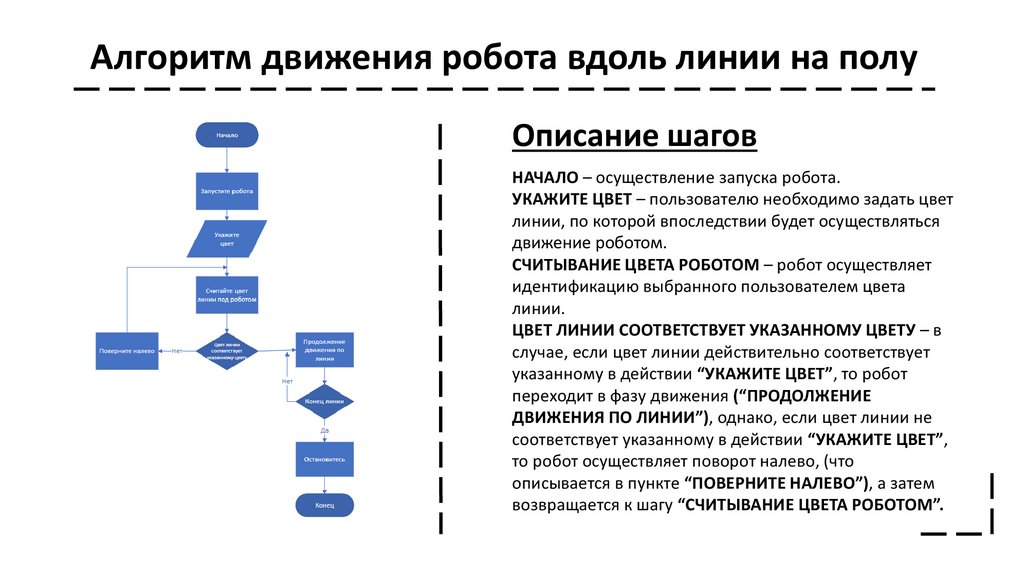
Алгоритм движения робота вдоль линии на полуОписание шагов
НАЧАЛО – осуществление запуска робота.
УКАЖИТЕ ЦВЕТ – пользователю необходимо задать цвет
линии, по которой впоследствии будет осуществляться
движение роботом.
СЧИТЫВАНИЕ ЦВЕТА РОБОТОМ – робот осуществляет
идентификацию выбранного пользователем цвета
линии.
ЦВЕТ ЛИНИИ СООТВЕТСТВУЕТ УКАЗАННОМУ ЦВЕТУ – в
случае, если цвет линии действительно соответствует
указанному в действии “УКАЖИТЕ ЦВЕТ”, то робот
переходит в фазу движения (“ПРОДОЛЖЕНИЕ
ДВИЖЕНИЯ ПО ЛИНИИ”), однако, если цвет линии не
соответствует указанному в действии “УКАЖИТЕ ЦВЕТ”,
то робот осуществляет поворот налево, (что
описывается в пункте “ПОВЕРНИТЕ НАЛЕВО”), а затем
возвращается к шагу “СЧИТЫВАНИЕ ЦВЕТА РОБОТОМ”.
3.
Алгоритм движения робота вдоль линии на полуОписание шагов
КОНЕЦ ЛИНИИ – в случае, если линия, по которой робот
осуществлял движение, закончилась, то робот
переходит в фазу остановки (“ОСТАНОВИТЕСЬ”), а в
случае, если линия не оборвалась, то робот продолжает
движение, соответственно пункту “ПРОДОЛЖЕНИЕ
ДВИЖЕНИЯ ПО ЛИНИИ”.
КОНЕЦ – завершение выполнения программы.