

 mechanics
mechanicsSimilar presentations:










АГНИ: интеллектуальная станция управления для УШГН с регулируемой длиной хода
1.
АГНИРазработка интеллектуальной станции управления
возможностью изменения длины хода штока на кривошипношатунном механизме для скважин с УШГН.
Ржанов Данила Вячеславович
АВТОР ПРЕЗЕНТАЦИИ
2.
АктуальностьРазработка интеллектуальной станции управления с изменением длины хода штока
является актуальной научно-технической задачей, решение которой направлено на преодоление
системных недостатков массово применяемого оборудования (УШГН).
Она находится на стыке нескольких приоритетных направлений:
• Повышение энергоэффективности и снижение себестоимости добычи.
• Увеличение извлекаемых запасов за счет интенсификации и оптимизации работы скважин.
• Цифровая трансформация производственных активов.
• Импортозамещение сложных технологических решений в нефтепромышленности.
АГНИ
2
3.
Цели и задачи исследованияЦель исследования: Повышение технологической
Задачи, которые необходимо решить для
и экономической эффективности эксплуатации
достижения поставленной цели:
скважин с УШГН, обеспечить необходимый дебит
1. Разработать модель динамики колонны штанг
скважины с минимальным расходом
глубинного насоса с учетом регулируемой длины
электроэнергии, а также своевременно определять
хода кривошипа.
развивающиеся дефекты нефтедобывающего
2. На основе разработанной модели и анализа
оборудования.
существующих методов предложить алгоритм
управления, способного в реальном времени
определять оптимальную длину хода.
3. Проверить работоспособность,спроектированной
модели.
АГНИ
3
4.
Объект исследованияОбъектом исследования является установка
штангового глубинного насоса (УШГН)
В основе исследования — кривошипношатунный механизм станка-качалки
(СК) как ключевое преобразующее звено,
определяющее технологический режим
работы скважины.
АГНИ
4
5.
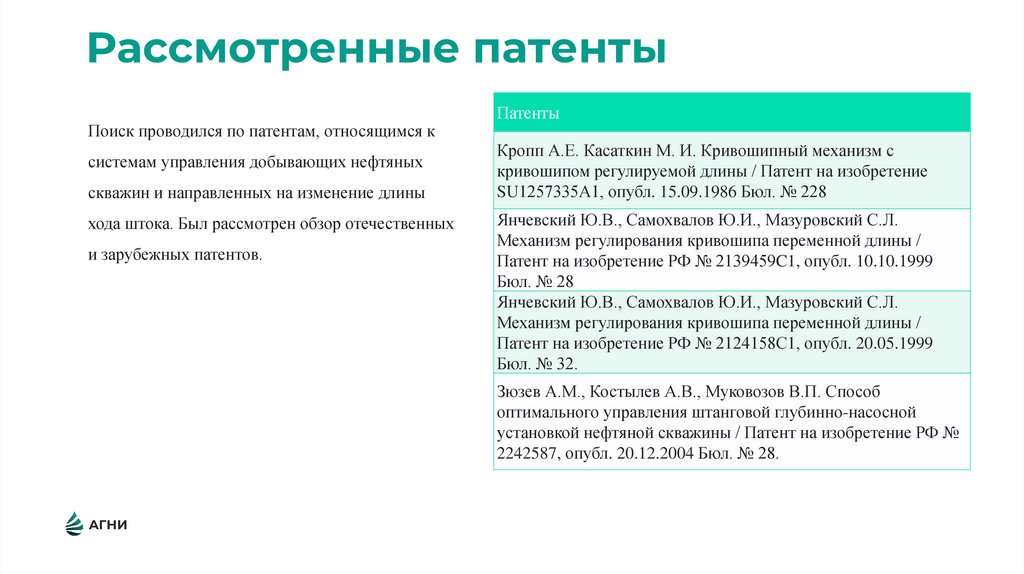
Рассмотренные патентыПоиск проводился по патентам, относящимся к
системам управления добывающих нефтяных
скважин и направленных на изменение длины
хода штока. Был рассмотрен обзор отечественных
и зарубежных патентов.
Патенты
Кропп А.Е. Касаткин М. И. Кривошипный механизм с
кривошипом регулируемой длины / Патент на изобретение
SU1257335А1, опубл. 15.09.1986 Бюл. № 228
Янчевский Ю.В., Самохвалов Ю.И., Мазуровский С.Л.
Механизм регулирования кривошипа переменной длины /
Патент на изобретение РФ № 2139459C1, опубл. 10.10.1999
Бюл. № 28
Янчевский Ю.В., Самохвалов Ю.И., Мазуровский С.Л.
Механизм регулирования кривошипа переменной длины /
Патент на изобретение РФ № 2124158С1, опубл. 20.05.1999
Бюл. № 32.
Зюзев А.М., Костылев А.В., Муковозов В.П. Способ
оптимального управления штанговой глубинно-насосной
установкой нефтяной скважины / Патент на изобретение РФ №
2242587, опубл. 20.12.2004 Бюл. № 28.
АГНИ
6.
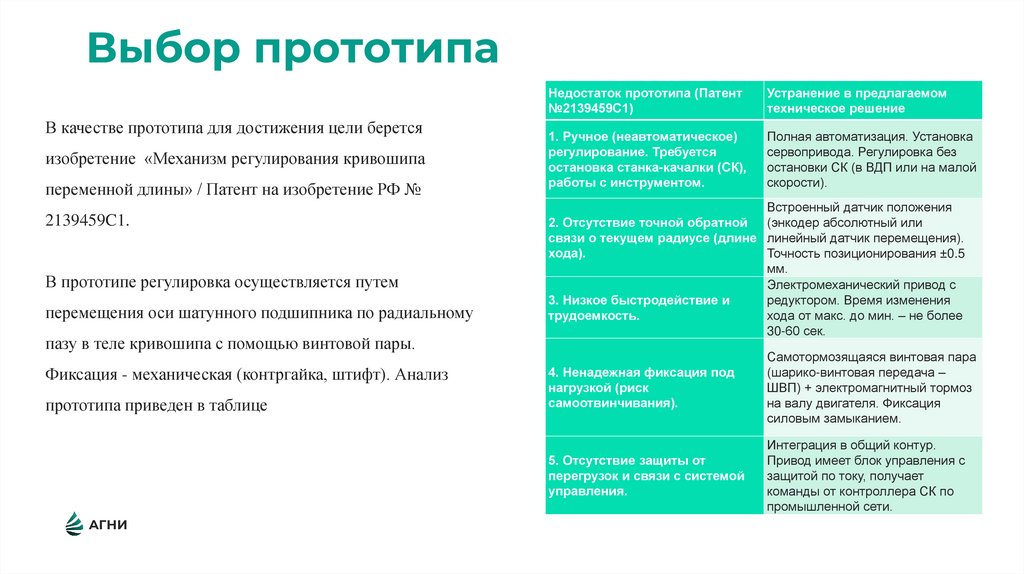
Выбор прототипаВ качестве прототипа для достижения цели берется
изобретение «Механизм регулирования кривошипа
переменной длины» / Патент на изобретение РФ №
2139459C1.
В прототипе регулировка осуществляется путем
перемещения оси шатунного подшипника по радиальному
пазу в теле кривошипа с помощью винтовой пары.
Фиксация - механическая (контргайка, штифт). Анализ
прототипа приведен в таблице
АГНИ
Недостаток прототипа (Патент
№2139459C1)
Устранение в предлагаемом
техническое решение
1. Ручное (неавтоматическое)
регулирование. Требуется
остановка станка-качалки (СК),
работы с инструментом.
Полная автоматизация. Установка
сервопривода. Регулировка без
остановки СК (в ВДП или на малой
скорости).
Встроенный датчик положения
2. Отсутствие точной обратной (энкодер абсолютный или
связи о текущем радиусе (длине линейный датчик перемещения).
хода).
Точность позиционирования ±0.5
мм.
Электромеханический привод с
3. Низкое быстродействие и
редуктором. Время изменения
трудоемкость.
хода от макс. до мин. – не более
30-60 сек.
4. Ненадежная фиксация под
нагрузкой (риск
самоотвинчивания).
Самотормозящаяся винтовая пара
(шарико-винтовая передача –
ШВП) + электромагнитный тормоз
на валу двигателя. Фиксация
силовым замыканием.
5. Отсутствие защиты от
перегрузок и связи с системой
управления.
Интеграция в общий контур.
Привод имеет блок управления с
защитой по току, получает
команды от контроллера СК по
промышленной сети.
7.
Описание предлагаемого технического решенияКонструкция механической части . Корпус и кривошип на основе стандартного кривошипа СК. Вместо
сплошного тела, кривошип имеет профилированный закрытый паз (как в прототипе) для движения суппорта с
шатунным подшипником. Передаточный механизм преобразует вращение вала привода в линейное движение
суппорта.
Предложенный механизм регулирования кривошипа переменной длины
содержит корпус 1, ведущий вал 2 с жестко установленной на нем прямозубой
шестерней 3, подвижно установленную на ведущем валу втулку 4 с прямозубым
зубчатым венцом 5, число зубьев которого равно числу зубьев неподвижной
шестерни. В расточке ведущего вала свободно установлен шток 6 с
возможностью осевого относительно ведущего вала перемещения с помощью
винтового механизма управления 7, приводимого в действие маховиком 8. В
штоке 6 изготовлено радиальное отверстие, в которое запрессован штифт 9, на
выступающие из штока концы которого свободно надеты две пары кулисных
камней 10 и 11, причем пара камней 10 расположена в сквозном винтовом пазе
12, изготовленном на цилиндрической поверхности ведущего вала 2, а пара
камней 11 - в сквозном винтовом пазе 13, изготовленном на цилиндрической
поверхности подвижной втулки 4 и имеющем противоположный наклон
винтовой линии по сравнению с наклоном винтовой линии паза 12. Шестерня 3
и зубчатый венец 5 втулки 4 входят в зацепление соответственно с ведомыми
зубчатыми колесами 14 и 15, расположенными на кривошипном валу 16, первое
неподвижно, а второе подвижно, и кинематически связанными с механизмом
двойного эксцентрика.
АГНИ
7
8.
Подведение итогов выполнения НИРРешение поставленной цели позволит достичь повышения технологической эффективности, путем анализа динамограммы в
реальном времени и регулированием параметров работы СК (число качаний, длину хода, включение/выключение), чтобы
поддерживать оптимальный режим отбора. Повышения экономической эффективности с помощью снижения удельного
расхода электроэнергии. Также обеспечить необходимый дебит с минимальным расходом электроэнергии.
Ожидаемые научные и практические результаты:
1. Проведен комплексный анализ существующих технических решений по регулированию работы УШГН.
2. Модель динамики УШГН с переменной длиной хода кривошипа. Разработана уточненная математическая модель системы
«привод – регулируемый кривошипно-шатунный механизм – упругая колонна штанг – плунжерный насос».
3. Алгоритм интеллектуального управления длиной хода. Алгоритм в реальном времени анализирует текущую
динамограмму и потребляемую мощность. На основе заданного целевого дебита и приоритета энергоэффективности он
определяет оптимальную пару параметров «длина хода (S) – число качаний (n)», обеспечивающую работу насоса с
максимальным коэффициентом наполнения.
4. Программный прототип системы управления с имитационной моделью для отладки: цифровой двойник скважины с
УШГН, блок управления с реализованными алгоритмами.
АГНИ
9.
ВыводТаким образом, поставленная цель достигнута. Теоретически и экспериментально доказана
принципиальная возможность и высокая эффективность применения интеллектуального управления
длиной хода кривошипа для решения задач энергосбережения, стабилизации добычи и предиктивного
обслуживания УШГН, подход к техническому обслуживанию, который основан на непрерывном
мониторинге состояния оборудования и анализе данных для предсказания потенциальных отказов..
АГНИ
10.
Спасибо за внимание!АГНИ