






. При більшій швидкості сталого")


 warfare
warfareSimilar presentations:
")
")
")
 у вертикальній площині")
")
")

 (групове заняття №3)")
")
")
Характеристики балансування вертольотів
1.
ЛЕКЦІЯ № 3Змістовий модуль 1. Характеристики
вертольотів
Тема заняття: Характеристики балансування
вертольотів
Навчальні питання:
1. Поняття балансування
2. Поздовжнє балансування
3. Бокове балансування
1
2.
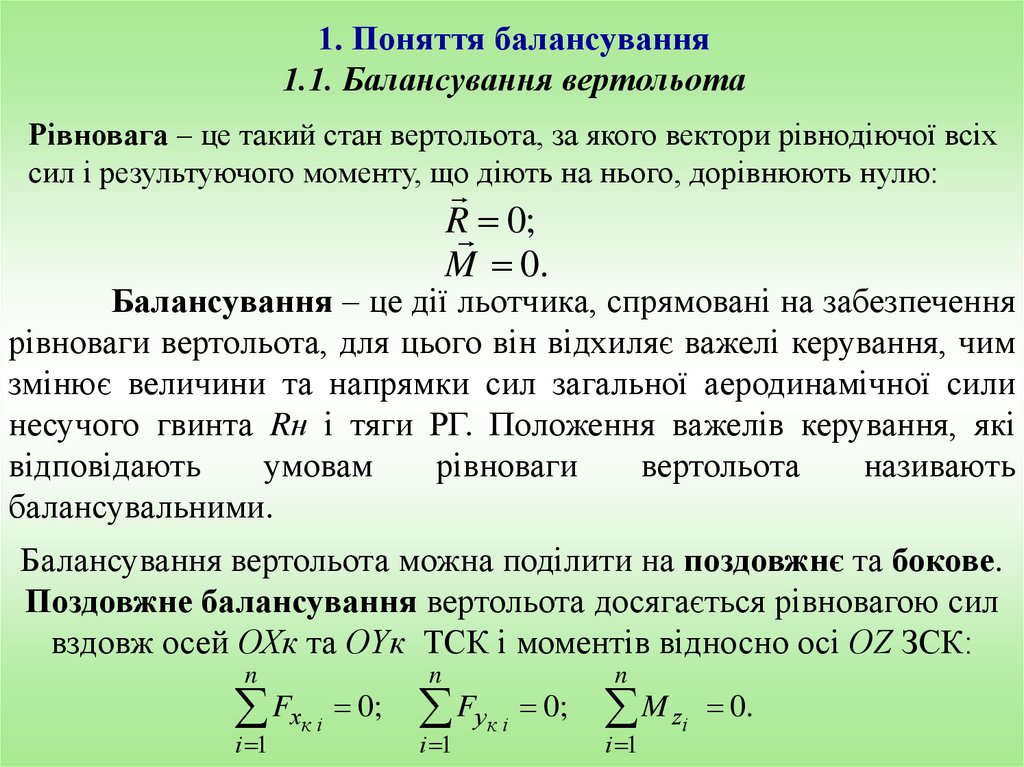
1. Поняття балансування1.1. Балансування вертольота
Рівновага – це такий стан вертольота, за якого вектори рівнодіючої всіх
сил і результуючого моменту, що діють на нього, дорівнюють нулю:
R 0;
M 0.
Балансування – це дії льотчика, спрямовані на забезпечення
рівноваги вертольота, для цього він відхиляє важелі керування, чим
змінює величини та напрямки сил загальної аеродинамічної сили
несучого гвинта Rн і тяги РГ. Положення важелів керування, які
відповідають
умовам
рівноваги
вертольота
називають
балансувальними.
Балансування вертольота можна поділити на поздовжнє та бокове.
Поздовжне балансування вертольота досягається рівновагою сил
вздовж осей ОХк та ОYк ТСК і моментів відносно осі ОZ ЗСК:
n
n
n
і 1
і 1
і 1
Fхк i 0; Fyк i 0; M zi 0.
3. Бокове балансування вертольота досягається рівновагою сил вздовж осі ОZк ТСК і рівновагою моментів відносно осей ОХ та ОY ЗСК:
nn
n
і 1
і 1
і 1
Fz к і 0; M xi 0; M yi 0.
1.2. Поняття характеристик балансування вертольота
Характеристики балансування вертольоту — це параметри,
які описують положення органів керування (відхилення тарілки
автомата перекосу, кроку НГ, φор), необхідні для забезпечення рівноваги
сил і моментів на сталому режимі польоту. Вони визначаються як
балансувальні значення відхилених керуючих поверхонь (органів
керування), параметру положення вертольота, що задовольняють
рівнянням стану рівноваги. Ці характеристики є ключовими для оцінки
льотних якостей, оскільки їх величина та зміна впливають на
керованість
і
стійкість
вертольоту.
4.
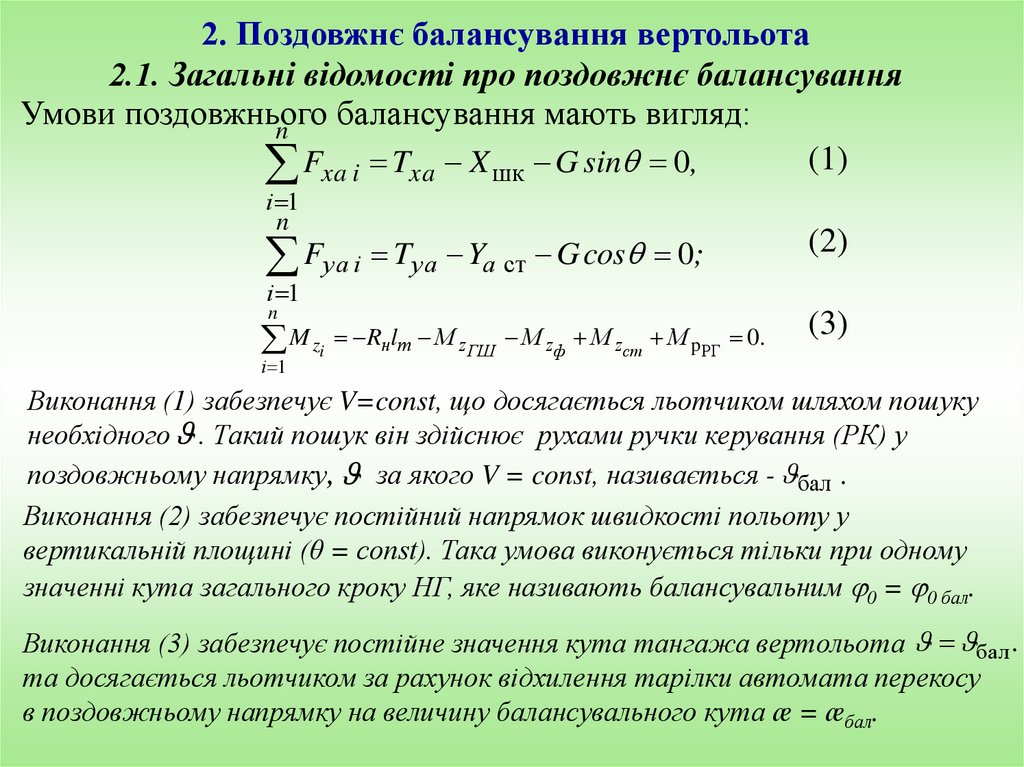
2. Поздовжнє балансування вертольота2.1. Загальні відомості про поздовжнє балансування
Умови поздовжнього
балансування мають вигляд:
n
(1)
Fxa i Txa X шк G sin 0,
і 1
n
Fуа і Tуа Yа ст G cos 0;
(2)
n
(3)
і 1
M zi Rнlт М z ГШ М zф M zст М pРГ 0.
і 1
Виконання (1) забезпечує V=const, що досягається льотчиком шляхом пошуку
необхідного . Такий пошук він здійснює рухами ручки керування (РК) у
поздовжньому напрямку, за якого V = const, називається - бал .
Виконання (2) забезпечує постійний напрямок швидкості польоту у
вертикальній площині (θ = const). Така умова виконується тільки при одному
значенні кута загального кроку НГ, яке називають балансувальним 0 = 0 бал.
Виконання (3) забезпечує постійне значення кута тангажа вертольота бал .
та досягається льотчиком за рахунок відхилення тарілки автомата перекосу
в поздовжньому напрямку на величину балансувального кута æ = æбал.
5. 2.2. Балансувальний кут поздовжнього відхилення тарілки автомата перекосу
Характеристики балансування вертольота2.2. Балансувальний кут поздовжнього відхилення тарілки
автомата перекосу
æбал
Максимальне відхилення тарілки АП назад (æmax)
На себе
xт 0
Від себе
Відхилення
ручки
циклічного
кроку кроку
Відхилення
ручки
циклічного
Самостійно - Аеродинаміка і динаміка польоту вертольота. Ч. 2. Динаміка
польоту вертольота: посібник
МШ
xт 0
xт 0
V
0
Максимальне відхилення тарілки АП вперед (æmax)
6.
67. 2.3. Балансувальний кут загального кроку несучого гвинта
YаRн
Ty а
Tx а
Yа ст
X шк
0
V
Xа
X
G
Рис. 2.2.9. Схема сил, що діють на вертоліт у сталому горизонтальному польоті
Умови рівноваги поздовжніх сил мають вигляд:
Tya G
Txa Хшк
Умову рівноваги льотчик забезпечує зміною ЗК НГ. Значення кута
φ0, за якого досягається рівність піднімальної сили НГ і G
вертольота, називається балансувальним - φ0 бал.
8. Рис. 2.2.10. Залежність кута балансувального ЗК НГ від швидкості польоту для різних висот польоту
H const, m const0 бал
H 2 H1
H1
Вплив зменшення
індуктивної швидкості НГ,
збільшення
ЗЗО, X шк
Вплив ефекту
навскісного
обтікання НГ
0
Vе
V
Рис. 2.2.10. Залежність кута балансувального ЗК НГ від
швидкості польоту для різних висот польоту
9. 2.4. Балансувальний кут тангажа
Самостійно - Аеродинаміка і динаміка польоту вертольота.Ч. 2. Динаміка польоту вертольота: підручник
бал
xт 0
xт 0
xт 0
Vmax
Vе
V
10.
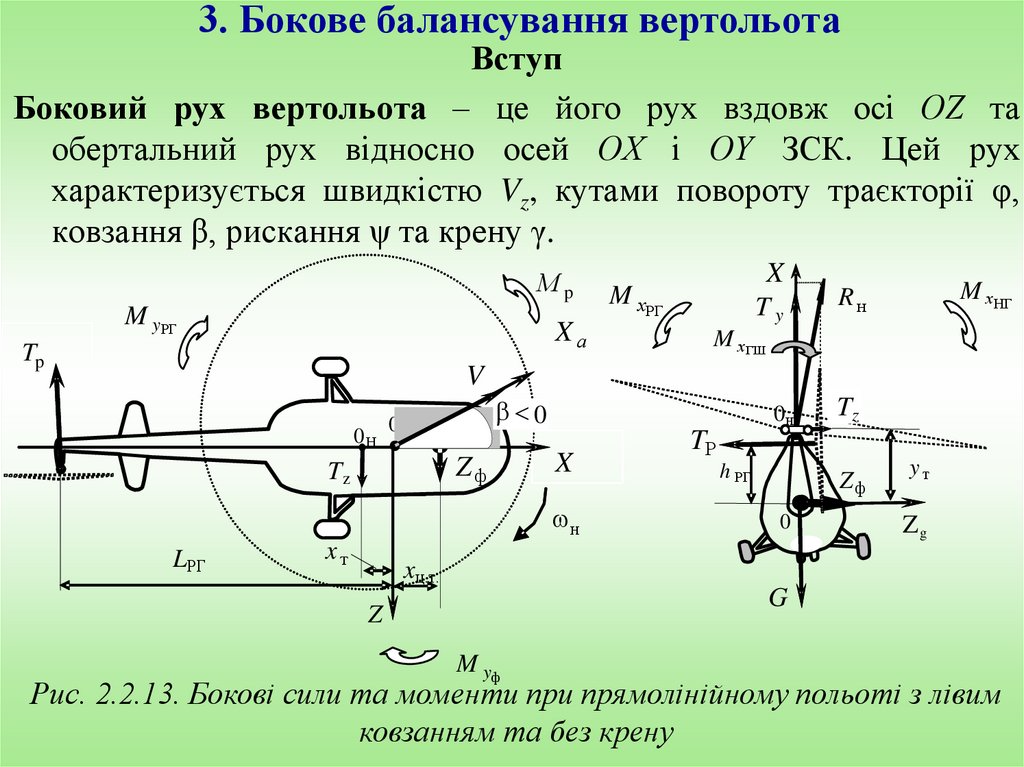
3. Бокове балансування вертольотаВступ
Боковий рух вертольота – це його рух вздовж осі ОZ та
обертальний рух відносно осей ОХ і ОY ЗСК. Цей рух
характеризується швидкістю Vz, кутами повороту траєкторії φ,
ковзання β, рискання ψ та крену γ.
Мp
M yРГ
Xа
Tp
X
M хРГ
Ty
M х HГ
Rн
M х ГШ
V
0Н
b 0
0
Zф
Tz
0н
X
wн
LРГ
xт
Tz
TР
h PГ
Zф
0
yт
Zg
xц.т.
G
Z
M yф
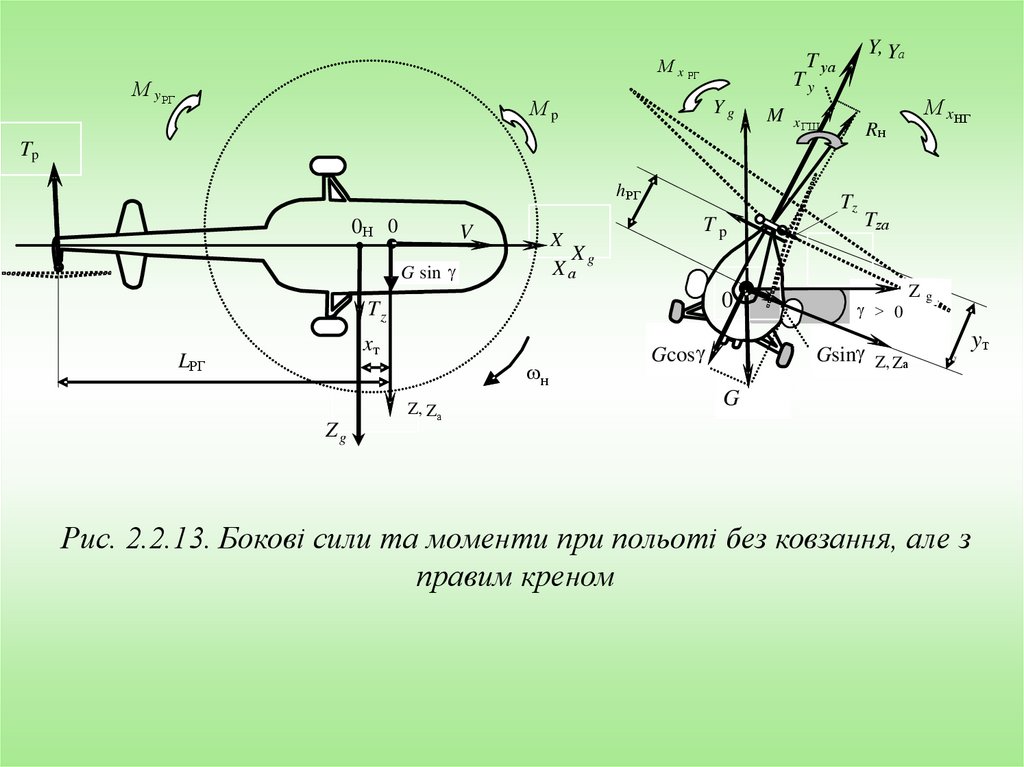
Рис. 2.2.13. Бокові сили та моменти при прямолінійному польоті з лівим
ковзанням та без крену
11.
М y РΓY, Yа
T yа
М x РГ
Ty
Мp
Yg
M x ГШ
Rн
М xНГ
Tp
hРГ
0Н 0
V
X
Tz
Tp
Xg
Xа
G sin g
0
Tz
xт
LРГ
wн
Zg
Z, Zа
Tzа
Gcos g
g 0
Gsing Z, Zа
Zg
yт
y
G
Рис. 2.2.13. Бокові сили та моменти при польоті без ковзання, але з
правим креном
12. 3.1. Умови бокового балансування
Бокове балансування вертольота – це дії льотчика щодозабезпечення рівноваги сил, діючих вздовж бокової осі OZ g , а також
МX та МY в прямолінійному сталому горизонтальному польоті (Рис.
2.2.13.)
n
n
M x 0; (2)
Fz 0; (1)
³ 1
³ 1
g
i
n
M y 0. (3)
³ 1
i
Виконання (1) забезпечує постійний кут повороту траєкторії φ,
(забезпечується льотчиком шляхом підбором необхідних кутів γ
та β).
Виконання (2) забезпечує постійний кут крену γ ( забезпечується
льотчиком внаслідок відхилення РК у боковому напрямку).
Виконання (3) забезпечує постійний кут рискання ψ (магнітний
курс), (досягається льотчиком лише зміною кутів встановлення
лопатей РГ(переміщення педалей).
13.
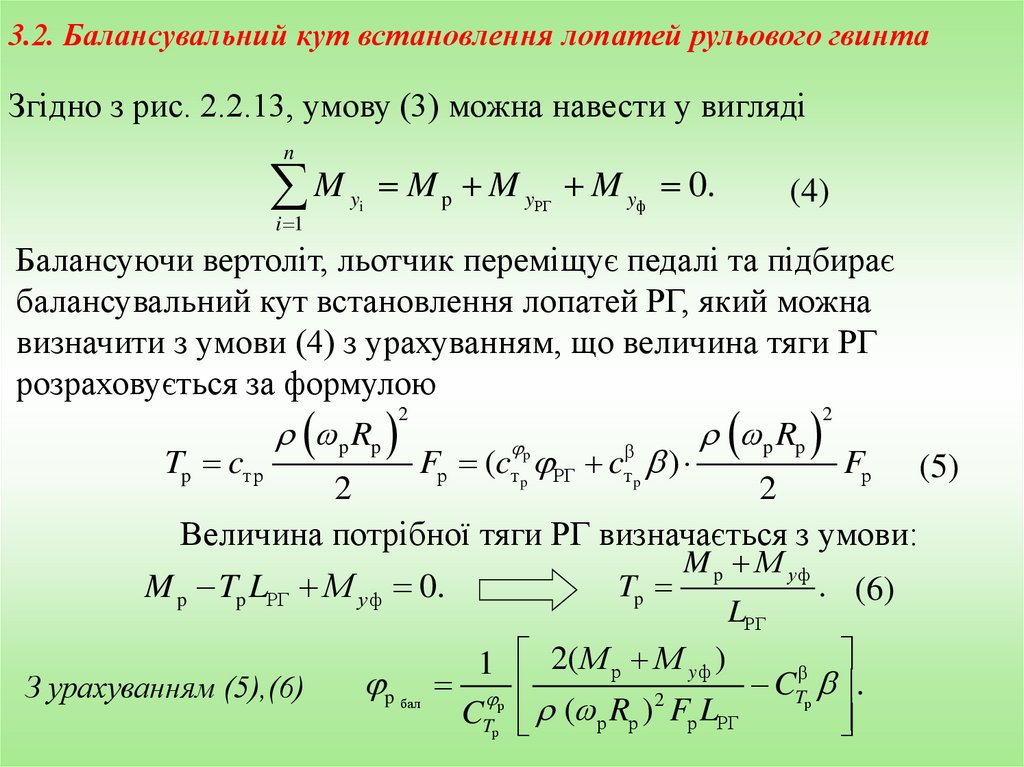
3.2. Балансувальний кут встановлення лопатей рульового гвинтаЗгідно з рис. 2.2.13, умову (3) можна навести у вигляді
n
M M M
i 1
yi
p
yРГ
M yф 0.
(4)
Балансуючи вертоліт, льотчик переміщує педалі та підбирає
балансувальний кут встановлення лопатей РГ, який можна
визначити з умови (4) з урахуванням, що величина тяги РГ
розраховується за формулою
2
2
wp Rp
wp Rp
p
β
Tp cтp
Fp (cтp РГ cтp b )
Fp (5)
2
2
Величина потрібної тяги РГ визначається з умови:
M p Tp LРГ М у ф 0.
З урахуванням (5),(6)
Tp
M p М уф
LРГ
. (6)
1 2( М р М y ф )
β
p бал р
CTр b .
2
CTр (wр Rр ) Fр LРГ
14.
pбал
Граничне відхиленняправої педалі
β 0
H const;
m const
β 0
β 0
0
Vе
V
Граничне відхилення лівої педалі
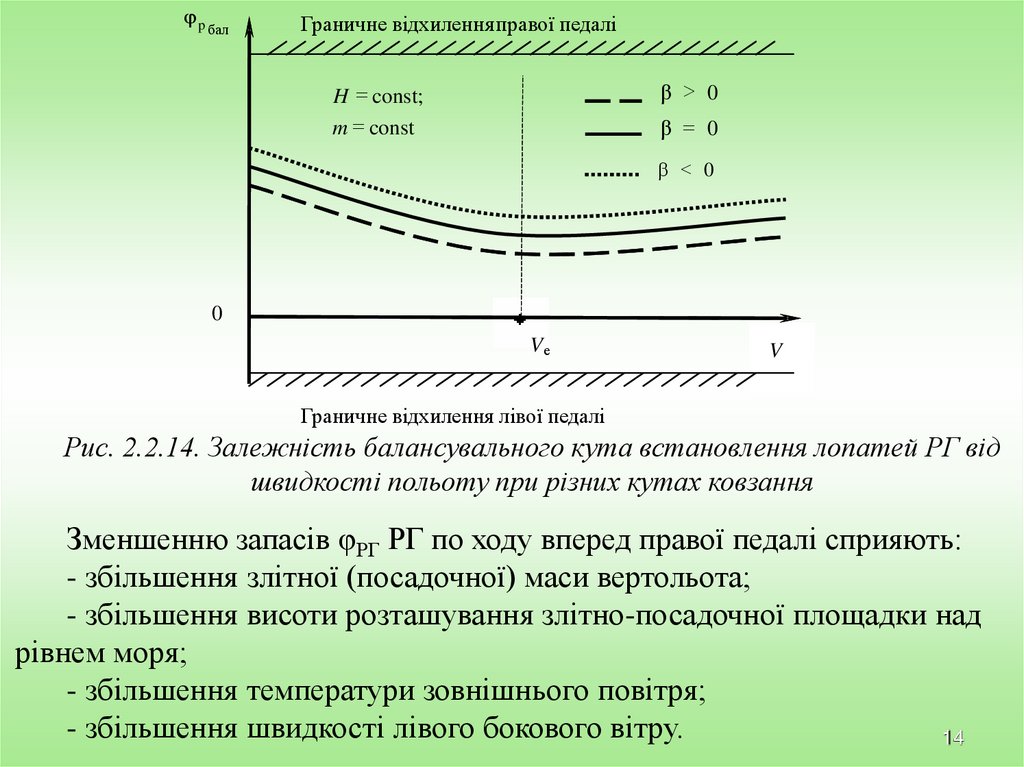
Рис. 2.2.14. Залежність балансувального кута встановлення лопатей РГ від
швидкості польоту при різних кутах ковзання
Зменшенню запасів φРГ РГ по ходу вперед правої педалі сприяють:
- збільшення злітної (посадочної) маси вертольота;
- збільшення висоти розташування злітно-посадочної площадки над
рівнем моря;
- збільшення температури зовнішнього повітря;
- збільшення швидкості лівого бокового вітру.
14
15.
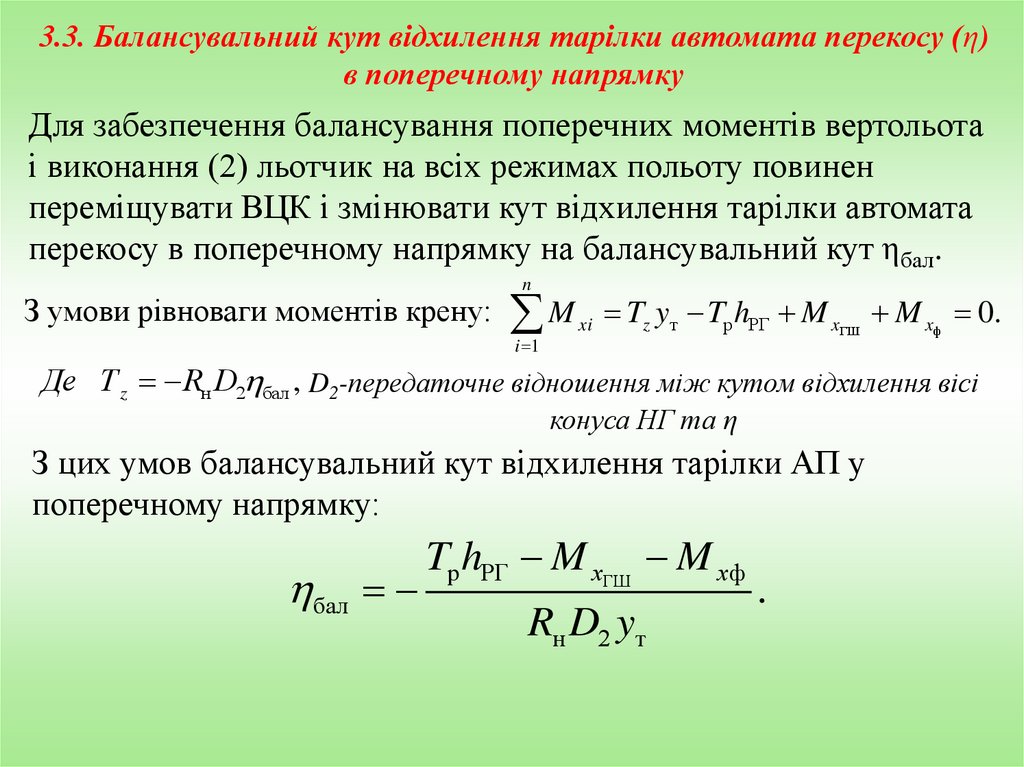
3.3. Балансувальний кут відхилення тарілки автомата перекосу (η)в поперечному напрямку
Для забезпечення балансування поперечних моментів вертольота
і виконання (2) льотчик на всіх режимах польоту повинен
переміщувати ВЦК і змінювати кут відхилення тарілки автомата
перекосу в поперечному напрямку на балансувальний кут ηбал.
n
З умови рівноваги моментів крену: M xi Tz yт Tp hРГ M xГШ M xф 0.
i 1
Де Т z Rн D2 бал , D2-передаточне відношення між кутом відхилення вісі
конуса НГ та η
З цих умов балансувальний кут відхилення тарілки АП у
поперечному напрямку:
бал
Tр hРГ M хГШ M х ф
Rн D2 yт
.
16.
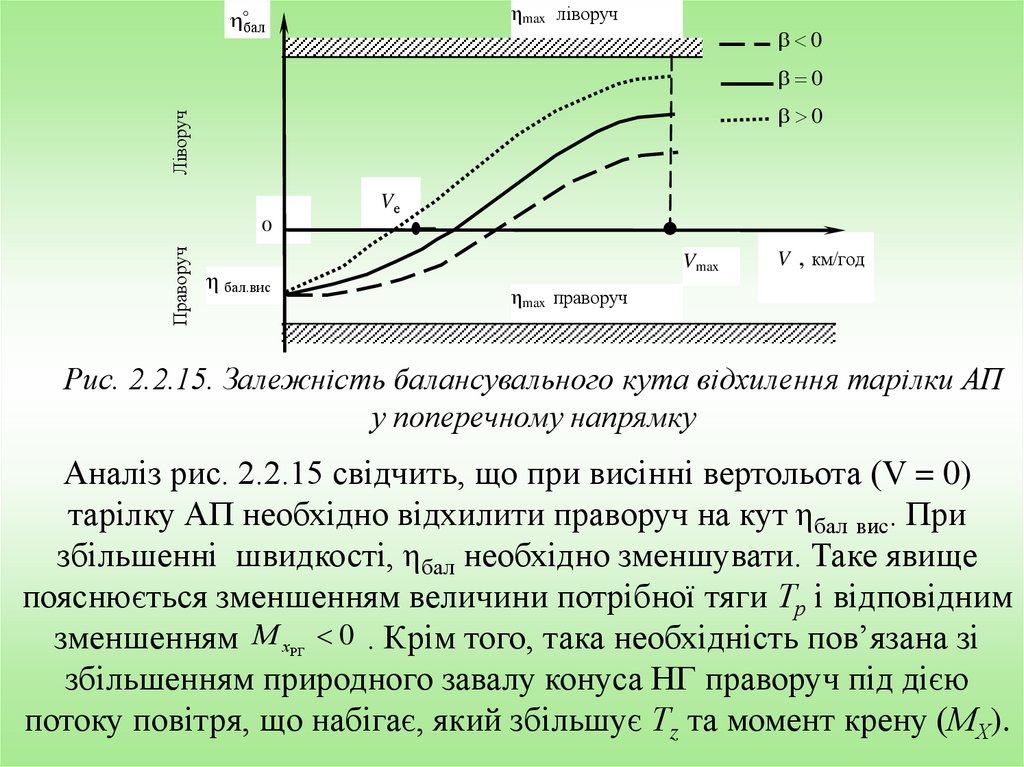
ηmax ліворучбал
b 0
b 0
Ліворуч
b 0
Vе
Праворуч
0
Vmax
η бал.вис
V , км/год
ηmax праворуч
Рис. 2.2.15. Залежність балансувального кута відхилення тарілки АП
у поперечному напрямку
Аналіз рис. 2.2.15 свідчить, що при висінні вертольота (V = 0)
тарілку АП необхідно відхилити праворуч на кут ηбал вис. При
збільшенні швидкості, ηбал необхідно зменшувати. Таке явище
пояснюється зменшенням величини потрібної тяги Тр і відповідним
зменшенням М х 0 . Крім того, така необхідність пов’язана зі
збільшенням природного завалу конуса НГ праворуч під дією
потоку повітря, що набігає, який збільшує Тz та момент крену (МХ).
РГ
17.
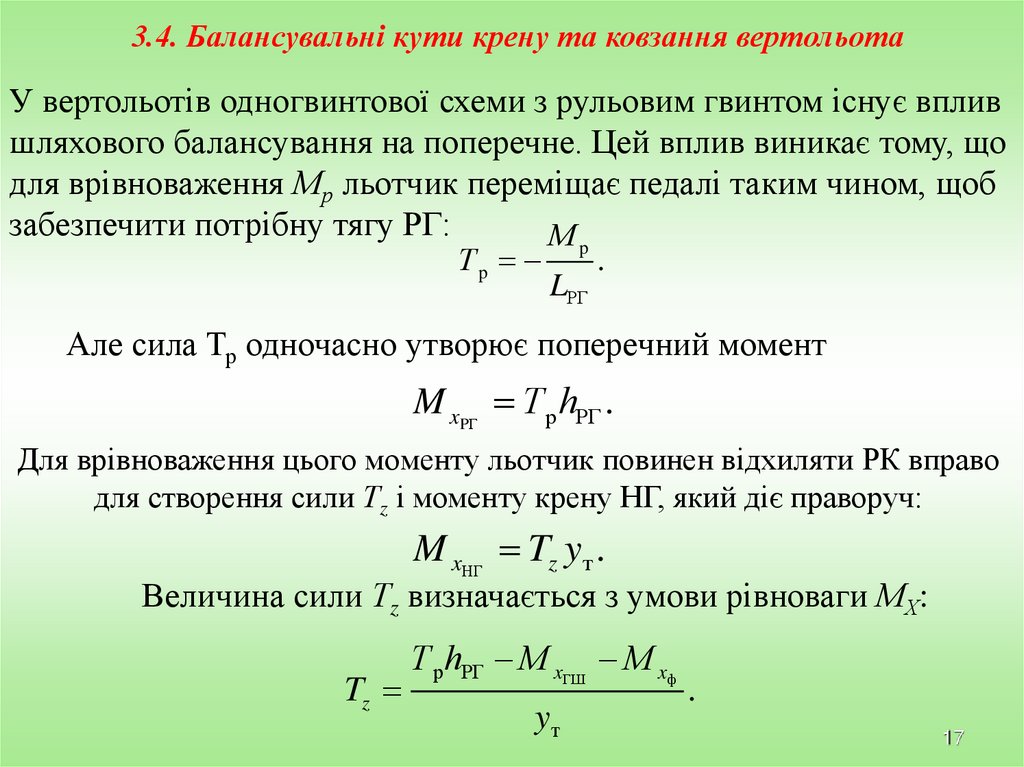
3.4. Балансувальні кути крену та ковзання вертольотаУ вертольотів одногвинтової схеми з рульовим гвинтом існує вплив
шляхового балансування на поперечне. Цей вплив виникає тому, що
для врівноваження Мр льотчик переміщає педалі таким чином, щоб
забезпечити потрібну тягу РГ:
М
Тp
p
LРГ
.
Але сила Тр одночасно утворює поперечний момент
M xPГ Т р hPГ .
Для врівноваження цього моменту льотчик повинен відхиляти РК вправо
для створення сили Тz і моменту крену НГ, який діє праворуч:
M xНГ Tz yт .
Величина сили Тz визначається з умови рівноваги МХ:
Tz
Т р hРГ M xГШ M xф
yт
.
17
18.
Балансування по крену(ковзанню)
Чому на висінні правий крен (а
на вертольоті Мі-24 вісь вала
НГ нахилена вправо на 2о30 )?
Синім кольором далі позначено те що вивчити напам'ять.
18
19.
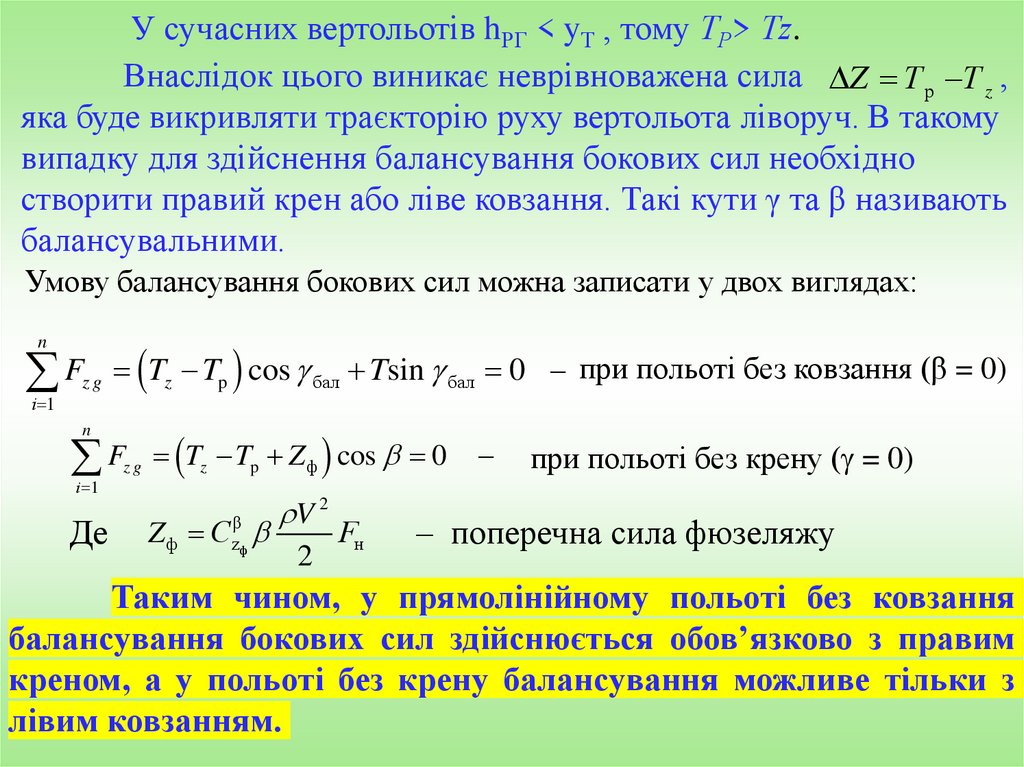
У сучасних вертольотів hРГ < yТ , тому ТР> Тz.Внаслідок цього виникає неврівноважена сила Z Т р –Т z ,
яка буде викривляти траєкторію руху вертольота ліворуч. В такому
випадку для здійснення балансування бокових сил необхідно
створити правий крен або ліве ковзання. Такі кути γ та β називають
балансувальними.
Умову балансування бокових сил можна записати у двох виглядах:
F T T cos g
n
і 1
zg
z
p
бал
Tsin g бал 0 – при польоті без ковзання (β = 0)
F T T Z cos b 0
n
і 1
Де
zg
z
p
Zф С b
β
zф
ф
V 2
2
Fн
при польоті без крену (g = 0)
– поперечна сила фюзеляжу
Таким чином, у прямолінійному польоті без ковзання
балансування бокових сил здійснюється обов’язково з правим
креном, а у польоті без крену балансування можливе тільки з
лівим ковзанням.
20. На висінні балансування вертольота здійснюється з невеликим правим креном (γбал = 2 – 3). При більшій швидкості сталого
g балb 0; H const
0
Vе
V
Рис. 2.2.16. Залежність балансувального кута крену від швидкості
при польоті без ковзання
На висінні балансування вертольота здійснюється з
невеликим
правим
креном
(γбал
=
2
–
3 ).
При більшій швидкості сталого польоту V < Ve за рахунок
навкісного обтікання повна сила несучого гвинта Rн зростає, тому
для здійснення прямолінійного ГП необхідно зменшувати φ0, а це
веде до зменшення моменту Мр, тяги РГ і поперечної сили НГ. Тому
відповідно зменшується і величина γбал.
21. У прямолінійному польоті без крену балансування бокових сил здійснюється створенням лівого ковзання. У цьому випадку умова (при
У прямолінійному польоті без крену балансування бокових силздійснюється створенням лівого ковзання. У цьому випадку умова
F T T Z cos b 0
n
і 1
zg
z
p
ф
(при польоті без крену (g = 0) )приймає вигляд
Tz Tp Zф Tz Tp Czβф bбал
V 2
2
Fн 0
Значення балансувального кута ковзання з цієї умови визначається
за допомогою формули
bбал
2(Tp Tz )
β
Cz V 2 Fн
ф
.
22. Рис. 2.2.17. Залежності балансувального кута ковзання від швидкості та висоти горизонтального прямолінійного польоту
β балg 0 ; H 2 H 1 const
Ліве ковзання
0
V
H1
H2 > H1
Рис. 2.2.17. Залежності балансувального
кута ковзання від швидкості та висоти
горизонтального прямолінійного польоту
Аналіз залежностей на рис. 2.2.17 свідчить, що при збільшенні V
при польоті без крену величина балансувального кута лівого ковзання
зменшується. Це пояснюється збільшенням швидкісного напору
повітря, що змінює Тр та поперечну силу фюзеляжу Zф.
Крім того при збільшенні висоти польоту величина βбал
збільшується за абсолютною величиною.
Таким чином, висіння вертольота можливе тільки з правим
креном, а поступальний прямолінійний політ можна виконувати з
правим креном чи з лівим ковзанням або з невеликими значеннями γ
та β.
23.
Навчальна літератураАеродинаміка і динаміка польоту вертольота.
Ч. 2. Динаміка польоту вертольота:
підручник / А. Г. Зінченко, І. Б. Ковтонюк,
В. М. Костенко та ін.; за заг. редакцією
В. М. Костенка та І. Б. Ковтонюка. – Х. :
ХУПС, 2010.