 модели")























 pedagogy
pedagogySimilar presentations:










Квалификационный экзамен по ПМ.01 Создание и корректировка компьютерной (цифровой) модели
1. Квалификационный экзамен по ПМ.01 Создание и корректировка компьютерной (цифровой) модели
консультации2. Содержание ПМ.01:
МДК 01.01Средства оцифровки реальных объектов
МДК 01.02
Методы создания и корректировки компьютерных моделей
в том числе КП
УП 01
Создание и корректировка компьютерной (цифровой) модели
ПП 01
Создание и корректировка компьютерной (цифровой) модели
3. Виды 3D сканеров
3D сканерыВиды 3D сканеров
контактные
бесконтактные
активные
оптические
времяпролётные
лазерные
триангуляционные
пассивные
4. Контактные 3D сканеры
Измерительная рукаКИМ
(координатно-измерительная машина)
5. Бесконтактные 3D сканеры
Оптические 3D сканерыЛазерные 3D сканеры
Самый доступный способ получения точных
данных об объекте в трех измерениях.
Сканирование с помощью структурированного
света — более простой и дешевый, по
сравнению с лазерным, вариант оптического 3Dсканирования.
На
исследуемую
деталь
проецируется
эталонный
геометрический
рисунок, изображение которого искажается
поверхностью объекта. Две видеокамеры
считывают это изображение под разными
углами, а программное обеспечение сканера
экстраполирует полученные данные в цифровую
модель поверхности.
Хотя метрологические системы, основанные на
принципе структурированного света, обладают
меньшей точностью, чем лазерные 3D-сканеры,
они дешевле, проще в эксплуатации и с их
помощью можно безопасно сканировать живые
объекты, например человека.
Сканирование
поверхностей
с
помощью
сенсорного
зондирования в нескольких точках не дает представления о ее
форме. Лазерное сканирование – технология, использующая
лазерные лучи для измерения и захвата формы детали.
Лазерный сканер использует разницу в отражениях лазерных
лучей от различных точек поверхности, которые затем
обрабатываются в программном обеспечении для получения
облака точек.
Лазерное сканирование генерирует миллионы точек, чтобы дать
детальное трехмерное изображение всей поверхности с очень
высоким уровнем точности и детализации. Лазерные 3Dсканеры не нуждаются в физическом контакте с объектами
исследований, что делает их удобными для проведения
неразрушающего или дистанционного контроля. Как правило,
устройства используют сетку из перекрещенных лазерных лучей,
параллельные или одиночные лазерные линии. Так как лазеры –
источники когерентного света, лазерные сканеры слабо
чувствительны ко внешним условиям: уровню освещения или
загрязненности среды.
6. Лазерные 3D сканеры
Времяпролётный лазерный 3D-сканер – это активный сканер, который использует лазерный луч, чтобыисследовать объект. В основе этого типа сканера лежит времяпролётный лазерный дальномер. В свою
очередь, лазерный дальномер определяет расстояние до поверхности объекта, исходя из времени пролёта
лазера туда и обратно. Сам лазер используется для создания светового импульса, в то время как детектор
измеряет время до того момента, пока свет не отразится. Учитывая, что скорость света (c) – величина
постоянная, то зная время пролёта луча туда-обратно, можно определить расстояние, на которое
переместился свет, оно будет в два раза больше расстояния между сканером и поверхностью объекта. Если
(t) – это время полёта луча лазера туда-обратно, тогда расстояние будет равно (c*t\2). Точность времени
пролёта лазерного луча 3D-сканера зависит от того, насколько точно мы можем измерить само время (t):
3,3 пикосекунды (приблизительно) необходимо для того, чтобы лазер преодолел 1 миллиметр.
Лазерный дальномер определяет расстояние только одной точки в заданном направлении. Поэтому
устройство сканирует все своё поле зрения по отдельным точкам за раз, меняя при этом направление
сканирования. Менять направление лазерного дальномера можно либо путем вращения самого прибора,
либо с помощью системы вращающихся зеркал. Зачастую используют последний метод, ведь он намного
быстрее, точнее, а также легче в обращении. К примеру, времяпролётные 3D-сканеры могут измерять
расстояние от 10 000 до 100 000 точек за одну секунду.
7. Лазерные 3D сканеры
Триангуляционные лазерные 3D-сканеры также относятся к активным сканерам,которые используют лазерный луч для того, чтобы прозондировать объект.
Подобно времяпролётным 3D-сканерам триангуляционные устройства посылают
на объект сканирования лазер, а отдельная камера фиксирует расположение
точки, куда попал лазер. В зависимости от того, как далеко лазер продвигается по
поверхности, точка появляется в различных местах поля зрения камеры. Эта
технология названа триангуляцией потому, что лазерная точка, камера и сам
лазерный излучатель образуют своеобразный треугольник. Известна длина
одной стороны этого треугольника – расстояние между камерой и лазерным
излучателем. Также известен угол лазерного излучателя. А вот угол камеры
можно определить по расположению лазерной точки в поле обзора камеры. Эти
3 показателя полностью определяют форму и размер треугольника и указывают
на расположение угла лазерной точки. В большинстве случаев, чтобы ускорить
процесс получения данных, вместо лазерной точки пользуются лазерной
полосой. Так, Национальный научно-исследовательский совет Канады был среди
первых научных организаций, разработавших основы технологии
триангуляционного лазерного сканирования ещё в 1978 году.
8. Фотограмметрия
Методов бесконтактной 3d оцифровки вагон и маленькая тележка, и когда мы говорим о 3d сканировании,первое, что приходит на ум — сканеры с Прогонной: оптические и лазерные.
Понятно, что они имеют некоторые ограничения в использовании, да и не каждому по средствам. Рано или
поздно всё равно возникает мысль: а вот бы с фотки обычной получить модельку. И оказывается, это
возможно. Более того, этот метод сканирования существует довольно долгое время, хоть и использовался,
в основном в картографии.
Вы загружаете в программу фотографии (с одного фотоаппарата) объекта, а программа прикидывает
облако точек. Прямо как оптический сканер. Причём она может так же захватывать цвет и текстуру.
Примерная стоимость ПО для фотограмметрии:
Также существует Meshrooms. Это интуитивно понятное бесплатное ПО с довольно высокими результатами.
9. Ручной измерительный инструмент
Определение линейных размеров и высоты:Микрометры.
Нутромеры.
Кронциркули.
Концевые меры длины.
Диаметр и глубина отверстий и выступов:
Штангенциркули.
Штангенглубиномеры.
Штангензубомер.
Штангенрейсмас.
Проверка точности и отклонений:
Поверочные линейки.
Поверочные призмы.
Угломеры.
Шаблоны радиусные и резьбовые.
Щупы.
Образцы шероховатости поверхностей.
10. Устройство штангенциркуля
• Передвижная рамка;• Подвижные губки для
определения
внутреннего размера;
• Подвижные губки для
определения
наружного размера;
• Шкала нониуса;
• Штанга глубиномера;
• Винт для крепления
рамки.
11. Форматы представления данных результатов сканирования
Облако точекнабор вершин в трёхмерной системе координат.
Эти вершины, как правило, определяются
координатами X, Y и Z и, как правило,
предназначены для представления внешней
поверхности объекта.
Облака точек создаются 3D-сканерами и
фотограмметрическими методами обработки
изображений. 3D-сканеры в автоматическом
режиме замеряют большое количество точек на
поверхности сканируемого объекта и зачастую
генерируют на выходе облако точек в виде
цифрового файла данных. Таким образом, облако
точек представляет собой множество точек,
полученных в результате 3D-сканирования
объекта.
Полигональная сетка
Полигональная сетка (жарг. меш от
англ. polygon mesh) — это
совокупность вершин, рёбер и
граней, которые определяют форму
многогранного объекта в трёхмерной
компьютерной графике и объёмном
моделировании. Гранями обычно
являются треугольники,
четырёхугольники или другие
простые выпуклые многоугольники
(полигоны), так как это упрощает
рендеринг, но сетки могут также
состоять и из наиболее общих
вогнутых многоугольников, или
многоугольников с отверстиями.
12.
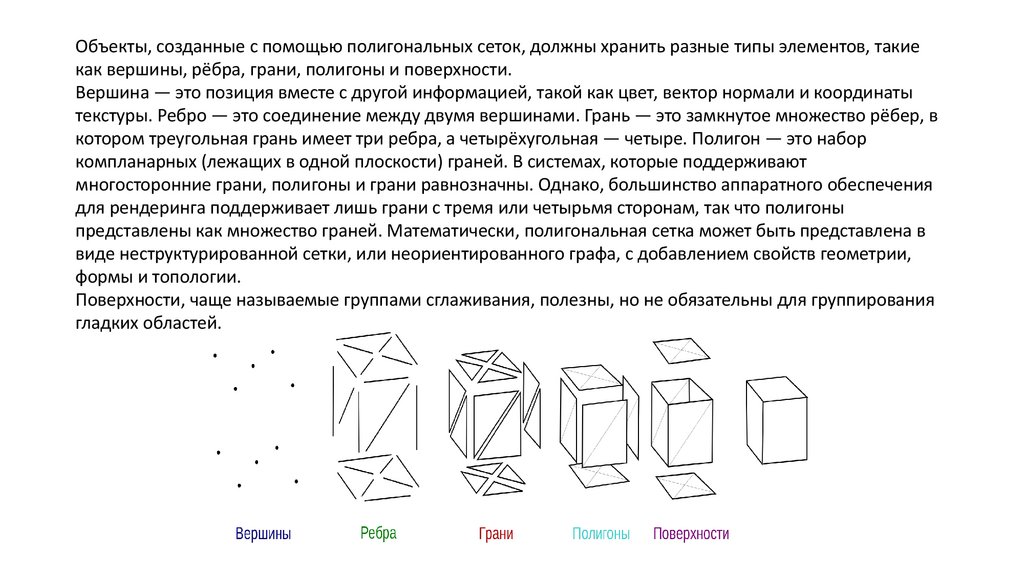
Объекты, созданные с помощью полигональных сеток, должны хранить разные типы элементов, такиекак вершины, рёбра, грани, полигоны и поверхности.
Вершина — это позиция вместе с другой информацией, такой как цвет, вектор нормали и координаты
текстуры. Ребро — это соединение между двумя вершинами. Грань — это замкнутое множество рёбер, в
котором треугольная грань имеет три ребра, а четырёхугольная — четыре. Полигон — это набор
компланарных (лежащих в одной плоскости) граней. В системах, которые поддерживают
многосторонние грани, полигоны и грани равнозначны. Однако, большинство аппаратного обеспечения
для рендеринга поддерживает лишь грани с тремя или четырьмя сторонам, так что полигоны
представлены как множество граней. Математически, полигональная сетка может быть представлена в
виде неструктурированной сетки, или неориентированного графа, с добавлением свойств геометрии,
формы и топологии.
Поверхности, чаще называемые группами сглаживания, полезны, но не обязательны для группирования
гладких областей.
13. МДК 01.02
14. Виды 3D моделирования
• Полигональное моделирование• Сплайновое моделирование
• NURBS моделирование
• 3d-скульптинг
• Промышленное моделирование
• Параметрическое моделирование
• Твердотельное моделирование
• Поверхностное моделирование
15. Полигональное моделирование
низкополигональное моделирование (Low-Poly)среднеполигональное моделирование (Mid-Poly)
высокополигональное моделирование (High-Poly)
16. Твердотельное моделирование
17. CAD, CAM, CAE системы
САПРCAD, CAM, CAE системы
CAD
Лёгкие
Средние
CAM
Тяжёлые
Облачные
CAE
PowerMill
ABAQUS
AutoCAD
Autodesk
Inventor
PTC Creo
Fusion 360
MasterCam
ADAMS
Bricscad
SolidWorks
NX
Onshape
SprutCAM
ANSYS
SolidEdge
CATIA
ADEM
Autodesk
Simulation
Компас-3D
ESPRIT
T-FLEX
CAMWorks
Autodesk Artcam
18. Форматы представления трёхмерных данных
Формат файла хранит следующие данные:Собственные
• Blend
• DWG
• OBJ (бинарный)
• FBX
• 3DS
Геометрия – описывает форму.
Внешний вид – цвет, текстуры, материал.
Сцена – расположение источников
освещения, камер и других объектов.
Анимация – перемещения 3D модели.
Точная сетка
• чаще всего сетка из треугольных
полигонов.
• в файле хранятся данные о вершинах и
векторах-нормалях к сторонам
полигонов.
• приблизительное отображение
геометрии поверхности 3D модели.
• подходит для печати на 3D принтерах.
• используются NURBS (Non-Uniform
Rational B-Spline).
• состоит из узлов.
• выглядят гладкими в любом масштабе.
• не подходит для быстрой визуализации.
• STL
• OBJ ASCII
• COLLADA
• IGES
• STEP
• VRML/X3D
Внешний вид модели:
Методы кодирования геометрии:
Аппроксимирующая сетка
Универсальные
Конструктивная блочная геометрия
• строятся из примитивов логическими
операциями (процедурное
моделирование).
• можно вернуться к любому этапу.
• удобен в процессе моделирования.
• используется в большинстве САПР.
Текстура
Свойства
грани
19. Виды 3D моделирования в КОМПАС 3D
• Твердотельное• Поверхностное
• Сплайновое
20. Стили линий в КОМПАС 3D
21. Параметризация в КОМПАС 3D
Параметрический чертеж хранит в себе информацию о взаимосвязях и ограничениях, наложенныхна геометрические объекты, т.е. при изменении одного параметра, изменится и другой.
В Компасе такими связями будут – параллельность и перпендикулярность отрезков и прямых,
стрелки взгляда, равенство длин отрезков.
Еще один вид параметрической связи – это ассоциативность. Такая связь возникает, один объект как
бы привязывается к другому в процессе построения. Это размеры, штриховки, тех. обозначения – все
они изменяются при перестроении базового объекта.
Ограничение – это зависимость между параметрами объекта или равенство объекта постоянной
(константе).
Примеры ограничений – вертикальность и горизонтальность, перпендикулярность, симметрия
отрезков, прямых, линии разреза, сечения, стрелок взгляда.
Параметризацию в Компасе стоит применять в том случае, когда при модификации детали
изменяются только размеры, а внешний вид (топология) остается неизменным. Или, когда
создаваемая деталь будет служить прототипом для создания новых деталей.
22. Информационные и параметрические размеры в КОМПАС 3D
23. Модификатор Edit Poly в 3ds Max
24. Общий список вопросов
МДК 01.011.
2.
3.
4.
5.
6.
7.
8.
9.
10.
11.
12.
13.
14.
15.
16.
17.
18.
19.
20.
21.
22.
23.
24.
25.
26.
Оцифровка реальных объектов. Области применения. Методы. Инструменты.
Принципы работы оборудования для бесконтактной оцифровки.
Виды 3D сканеров.
Контактные 3D сканеры.
Бесконтактные 3D сканеры.
Оптические 3D сканеры.
Лазерные 3D сканеры.
Триангуляционные 3D сканеры.
Фотограмметрия.
Ручной измерительный инструмент.
Устройство штангенциркуля.
Этапы 3D сканирования изделий.
Факторы, влияющие на результаты оцифровки изделия.
Предварительные работы по оцифровке изделия.
Требования к характеристикам поверхностей, подлежащих бесконтактной оцифровке.
Форматы представления данных результатов сканирования.
Облако точек.
Полигональная сетка.
Программное обеспечение для работы с облаком точек.
Методы исправления полигональной сетки.
Состав и назначение меню Analysis в программе MeshMixer.
Состав и назначение меню Sculpt в программе MeshMixer.
Состав и назначение меню Edit в программе MeshMixer.
Состав и назначение меню Select в программе MeshMixer.
Анализ модели и подготовка её к печати в программе MeshMixer.
Виды и причины брака объемной оцифровки.
25.
МДК 01.021.
2.
3.
4.
5.
6.
7.
8.
9.
10.
11.
12.
13.
14.
15.
16.
17.
18.
19.
20.
21.
22.
23.
24.
25.
26.
27.
Области применения 3D моделирования.
Виды 3D моделирования.
Полигональное моделирование.
Твердотельное моделирование.
Поверхностное моделирование.
Сплайновое моделирование.
Скульптинг, как метод моделирования.
CAD, CAM, CAE системы.
Виды CAD систем.
Форматы представления трёхмерных данных.
Системы координат.
Виды 3D моделирования в КОМПАС 3D.
Использование привязок в КОМПАС 3D.
Использование вспомогательных прямых в КОМПАС 3D.
Использование функции «Элемент выдавливания» в КОМПАС 3D.
Использование функции «Элемент вращения» в КОМПАС 3D.
Использование функции «Элемент по сечениям» в КОМПАС 3D.
Использование функции «Элемент по траектории» в КОМПАС 3D.
Стили линий в КОМПАС 3D.
Автоматическая параметризация в КОМПАС 3D.
Ручная параметризация в КОМПАС 3D.
Информационные и параметрические размеры в КОМПАС 3D.
Создание чертежа на основе 3D модели в КОМПАС 3D.
Модификатор Edit Poly в 3ds Max
Булевы операции в 3D моделировании.
Массивы в 3D моделировании.
Внешний вид поверхности 3D модели.
26. Справочный материал
https://top3dshop.ru/blog/cmm-and-technologies.htmlhttps://www.pointcad.ru/novosti/fusion-360-ot-oblaka-tochek-do-tverdotelnoj-modeli