
 industry
industrySimilar presentations:










Мультироторные дроны и БПЛА
1.
Мультироторные дроны и БПЛАВыполнил: Бобренев Кирилл 9.401М-2
2.
Мультироторные дроны•В последние годы беспилотники становятся
все более популярными, они используются
во многих областях, таких как геодезия,
картография, гонки, логистика и т.д.
•Именно благодаря широкому
распространению мультироторные БПЛА
сегодня играют важную роль в беспилотной
технике.
• В этой статье мы расскажем о типах и
принципах работы мультироторных БПЛА.
3.
Что такое мультироторный беспилотник?•Мультироторные БПЛА - это
беспилотники, которые для создания
подъемной силы используют более двух
роторов с вращающимися лопастями с
фиксированным шагом. Угол наклона
ротора фиксирован, а не изменяется, как
в вертолете. Изменяя скорость
вращения разных роторов, можно
изменять крутящий момент движущей
силы, чтобы управлять траекторией
полета летательного аппарата.
• Мультиротор относительно прост и
стабилен. Внешний вид
мультироторного летательного
аппарата, реализованного в
настоящее время, намного меньше,
чем у самолета, поэтому он подходит
для работы в промышленности и для
использования на отдыхе.
4.
•Мультироторный дрон прост в управлении и можетвзлетать и садиться вертикально без взлетно-посадочной
полосы. Надежность мультироторного беспилотника в
основном зависит от бесщеточных двигателей, поэтому
двигатели отличаются повышенной надежностью.
•В то же время мультироторные БПЛА с простым
управлением и высокой стабильностью широко
используются во многих промышленных и
сельскохозяйственных областях.
•В сельскохозяйственной сфере фермеры могут быстро
научиться управлять мультироторными беспилотниками,
а также нести различные виды полезной нагрузки,
например, жидкие пестициды или семена. Таким
образом, они очень эффективны для опрыскивания и
посева.
• В промышленности БПЛА используются для
картографирования в горнодобывающей
промышленности и наблюдения. На транспорте они
значительно повышают эффективность работы.
5.
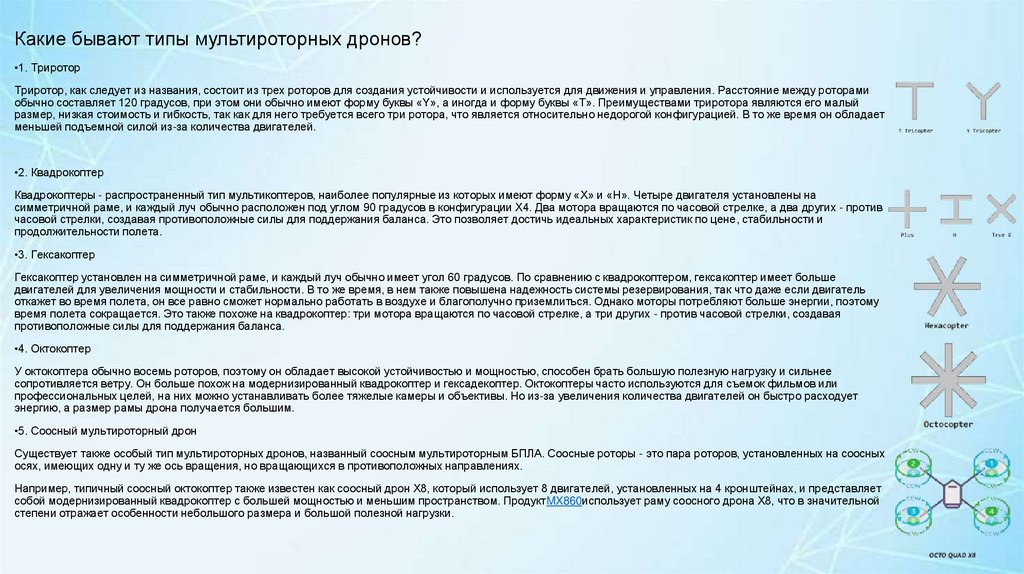
Какие бывают типы мультироторных дронов?•1. Триротор
Триротор, как следует из названия, состоит из трех роторов для создания устойчивости и используется для движения и управления. Расстояние между роторами
обычно составляет 120 градусов, при этом они обычно имеют форму буквы «Y», а иногда и форму буквы «T». Преимуществами триротора являются его малый
размер, низкая стоимость и гибкость, так как для него требуется всего три ротора, что является относительно недорогой конфигурацией. В то же время он обладает
меньшей подъемной силой из-за количества двигателей.
•2. Квадрокоптер
Квадрокоптеры - распространенный тип мультикоптеров, наиболее популярные из которых имеют форму «X» и «H». Четыре двигателя установлены на
симметричной раме, и каждый луч обычно расположен под углом 90 градусов в конфигурации X4. Два мотора вращаются по часовой стрелке, а два других - против
часовой стрелки, создавая противоположные силы для поддержания баланса. Это позволяет достичь идеальных характеристик по цене, стабильности и
продолжительности полета.
•3. Гексакоптер
Гексакоптер установлен на симметричной раме, и каждый луч обычно имеет угол 60 градусов. По сравнению с квадрокоптером, гексакоптер имеет больше
двигателей для увеличения мощности и стабильности. В то же время, в нем также повышена надежность системы резервирования, так что даже если двигатель
откажет во время полета, он все равно сможет нормально работать в воздухе и благополучно приземлиться. Однако моторы потребляют больше энергии, поэтому
время полета сокращается. Это также похоже на квадрокоптер: три мотора вращаются по часовой стрелке, а три других - против часовой стрелки, создавая
противоположные силы для поддержания баланса.
•4. Октокоптер
У октокоптера обычно восемь роторов, поэтому он обладает высокой устойчивостью и мощностью, способен брать большую полезную нагрузку и сильнее
сопротивляется ветру. Он больше похож на модернизированный квадрокоптер и гексадекоптер. Октокоптеры часто используются для съемок фильмов или
профессиональных целей, на них можно устанавливать более тяжелые камеры и объективы. Но из-за увеличения количества двигателей он быстро расходует
энергию, а размер рамы дрона получается большим.
•5. Соосный мультироторный дрон
Существует также особый тип мультироторных дронов, названный соосным мультироторным БПЛА. Соосные роторы - это пара роторов, установленных на соосных
осях, имеющих одну и ту же ось вращения, но вращающихся в противоположных направлениях.
Например, типичный соосный октокоптер также известен как соосный дрон X8, который использует 8 двигателей, установленных на 4 кронштейнах, и представляет
собой модернизированный квадрокоптер с большей мощностью и меньшим пространством. ПродуктMX860использует раму соосного дрона X8, что в значительной
степени отражает особенности небольшого размера и большой полезной нагрузки.
6.
Каковы преимущества и недостатки мультироторных дронов?•В настоящее время мультироторные БПЛА очень
распространены и широко используются для развлекательных и
профессиональных промышленных целей. Широкое
распространение они получили благодаря преимуществам
нескольких роторов.
•1. Простота управления и эксплуатации. Мультироторные
беспилотники имеют простую конструкцию. Он прост в
управлении и подходит для новичков.
•2.Подходит для различных мероприятий. Сильно маневренный
мультироторный дрон способен зависать в воздухе, взлетать и
садиться вертикально. Он обеспечивает узкое пространство для
взлета и посадки. Он идеально подходит для фото- и
видеосъемки.
•3.Низкая стоимость. Мультироторный БПЛА не имеет много
сложных аксессуаров, поэтому его стоимость производства и
обслуживания ниже, чем у других дронов.
• 4.Удобство для пилотов беспилотников. Мультироторные
БПЛА обычно имеют небольшой размер, они гибкие и
портативные, что обеспечивает неограниченное удобство для
пилотов беспилотников.
7.
Вывод•Мультироторный беспилотный летательный аппарат (БПЛА) представляет собой эффективную и универсальную платформу, широко
применяемую в различных сферах благодаря своей конструкции и функциональным возможностям. В ходе изучения его работы можно
сделать следующие выводы:
1.Конструктивные преимущества:
• Простота конструкции и управления обеспечивает высокую надежность и доступность для пользователей разного уровня
подготовки.
• Компактные размеры и маневренность позволяют использовать аппарат в условиях ограниченного пространства (например, в
городской среде или закрытых помещениях).
2.Функциональные возможности:
• Способность к вертикальному взлету и посадке, зависанию в воздухе и плавному перемещению делает мультироторные БПЛА
идеальными для задач аэрофотосъемки, мониторинга, поисково-спасательных операций и доставки грузов.
• Интеграция с современными системами навигации (GPS, ГЛОНАСС) и датчиками (гироскопы, акселерометры) обеспечивает
высокую точность позиционирования и стабильность полета.
3.Энергетические ограничения:
• Основным недостатком является ограниченное время полета из-за высокой энергоемкости и быстрого расхода заряда
аккумуляторов. Это существенно сужает диапазон применения для задач, требующих длительного нахождения в воздухе.
4.Перспективы развития:
• Совершенствование энергоэффективных систем питания (например, водородных топливных элементов) и материалов для
облегчения конструкции позволит увеличить продолжительность полета.
• Развитие автономных систем управления на основе искусственного интеллекта расширит возможности БПЛА в части
самостоятельного выполнения сложных задач и адаптации к изменяющимся условиям.