







 industry
industrySimilar presentations:






")



Разработка автономных станций зарядки БПЛА на ЛЭП для МРСК Урала
1.
Разработка автономных станций зарядки БПЛА на ЛЭПдля МРСК Урала
Направление: Современная энергетика
Тип: Исследовательский (научно-исследовательский)
Автор: Баженова Светлана Александровна
Роль в проекте: технический исполнитель команды по разработке автономной
станции зарядки
Город, школа, класс: г.Екатеринбург, лицей 110 им. Л.К.Гришиной, 10 «М» класс
Научный руководитель проекта: Баранова Анна Александровна
Технический руководитель проекта: Алдохин Филипп Эдуардович
2.
Энтузиаст –Созидатель –
Исследователь
Энтузиаст –
Критик –
Новатор
Баженова
Алёна
Баженова
Алёна
Баженова
Светлана
Телефон для связи:
8-950-547-62-02
Телефон для связи:
8-950-547-62-02
Человек не имеет крыльев и по отношению веса своего тела к
весу мускулов в 72 раза слабее птицы... Но я думаю, что он
полетит, опираясь не на силу своих мускулов, а на силу своего
разума".
Жуковский Н.Е.
Энтузиаст –
Ученый Вдохновитель
Хохлов
Константин
Олегович
Энтузиаст –
Ученый –
Наставник
Баранова
Анна
Александровна
К
О
М
А
Н
Д
А
П
Р
О
Е
К
Т
А
3.
3. Актуальность проекта:Главная проблема при мониторинге ЛЭП при помощи БПЛА – большая
протяженность ЛЭП и в основном удаленное расположение от
стационарных объектов, где можно дрона зарядить стандартным
способом.
Стоимость автономных станций дозарядки очень большая, они
громоздки, и могут использоваться только с участием человека –
что делает практически невозможным их применение в таком мониторинге.
Сетевое хозяйство ЕЭС России насчитывает более 13 000 линий
электропередачи класса напряжения 110 – 750 кВ общей
протяженностью более 490 тыс.км и более 10 000 электрических
подстанций 110–750 кВ. по состоянию на 01.01.2022г.
Из всех этих факторов сформировала ПРОБЛЕМУ: нужно обеспечить дозарядку БПЛА, учитывая
короткое время полета на одном заряде батареи и большую протяженность линий электропередач!
4.
4. ЦЕЛЬ:Создать опытный образец автономной станции дозарядки дронов на
ЛЭП, используя явление электромагнитной индукции, для нужд ОАО «МРСК УРАЛА» при
мониторинге электросетей.
Для достижения цели решаем следующие задачи:
1
Определить принципиальную схему зарядной станции.
2
Провести опыты в подтверждение расчетов с различными типами батарей.
3
Разработать опытный образец зарядной станции для дронов, размещаемую непосредственно на линиях
электропередач.
4
Необходимо составить типовую спецификацию и комплект конструкторской документации зарядной станции для
масштабирования их выпуска для инспекции линий электропередач МРСК Урала.
5
Изучить научную литературу и изобретения по каталогу патентов на рассматриваемую тему.
5.
5. Принцип действия системы дозарядки:1. Электромагнитная индукция – явление возникновения тока в замкнутом проводящем контуре при изменении
магнитного потока, пронизывающего его.
Явление электромагнитной индукции было открыто М. Фарадеем.
Шаг 1
Высоковольтные провода окружены магнитным полем или линиями
магнитной индукции. Когда дрон подлетает к зоне его действия, он
становится материальной средой, которая движется в магнитном поле, в том
числе все его составные части. Также в такой среде окажется посадочная
платформа.
Шаг 2
Устанавливаем на платформе катушку индуктивности, создаем замкнутый
электрический контур.
Преобразовываем полученный индукционный ток для получения заряда
батареи.
Дополняем бортовое оборудование дрона датчиками контроля заряда
батареи, чувствительности ЭМ поля.
Шаг 3
Шаг 4
Шаг 5
При посадке дрона на платформу заряжает его батарею. Можно использовать
выдвижную «стрелу» из площадки, увеличив таким образом расстояние
между дроном и ЛЭП.
6.
6. Анализ исследований / разработок по теме проекта:1. Впервые передачу электроэнергии по однопроводной линии предложил и осуществил Никола Тесла. В 1893 г.
он показал, что нет необходимости использовать два проводника для передачи электрической энергии и
практически была обоснована передача энергии через одиночный проводник без возврата.
2. Нами была проанализирована база Федерального института промышленной собственности:
https://www1.fips.ru/iiss на аналогичные исследования и разработки:
Номер, дата
2019101449, 18.01.2019
Наименование патента
Трансформатор для столбовой подстанции
2017134920, 04.10.2017
Автоматический комплекс дистанционной диагностики электросетевого оборудования
2003103618/09, 07.02.2003
Способ и устройство для передачи электрической энергии
2021124587, 19.08.2021
Устройство для передачи электрической энергии
5023506/07, 22.01.1992
Система электроснабжения
99120860/09, 29.09.1999
Система электроснабжения
7.
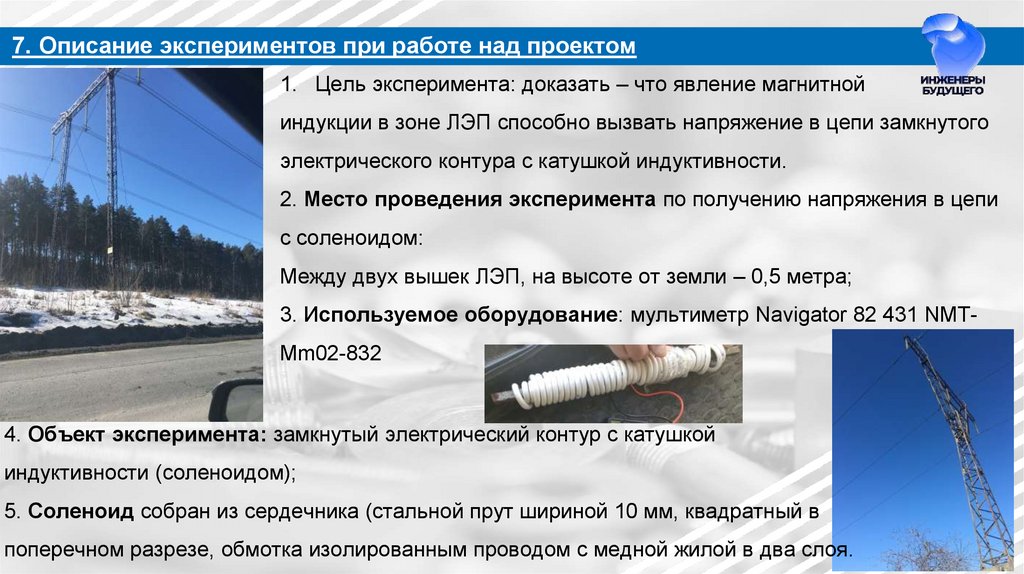
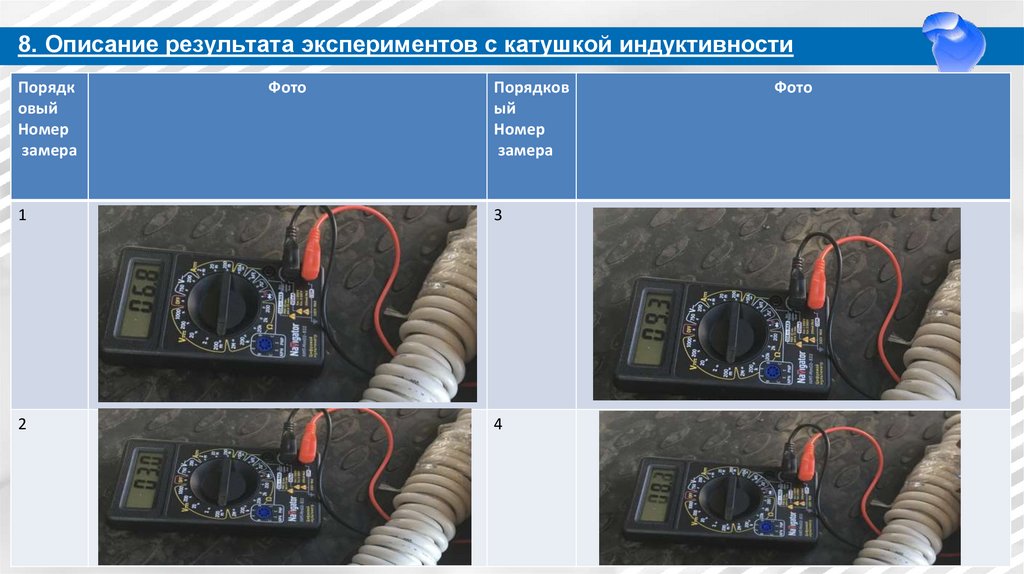
7. Описание экспериментов при работе над проектом:
1. Цель эксперимента: доказать – что явление магнитной
индукции в зоне ЛЭП способно вызвать напряжение в цепи замкнутого
электрического контура с катушкой индуктивности.
2. Место проведения эксперимента по получению напряжения в цепи
с соленоидом:
Между двух вышек ЛЭП, на высоте от земли – 0,5 метра;
3. Используемое оборудование: мультиметр Navigator 82 431 NMTMm02-832
4. Объект эксперимента: замкнутый электрический контур с катушкой
индуктивности (соленоидом);
5. Соленоид собран из сердечника (стальной прут шириной 10 мм, квадратный в
поперечном разрезе, обмотка изолированным проводом с медной жилой в два слоя.
8.
8. Описание результата экспериментов с катушкой индуктивностиПорядк
овый
Номер
замера
Фото
Порядков
ый
Номер
замера
1
3
2
4
Фото
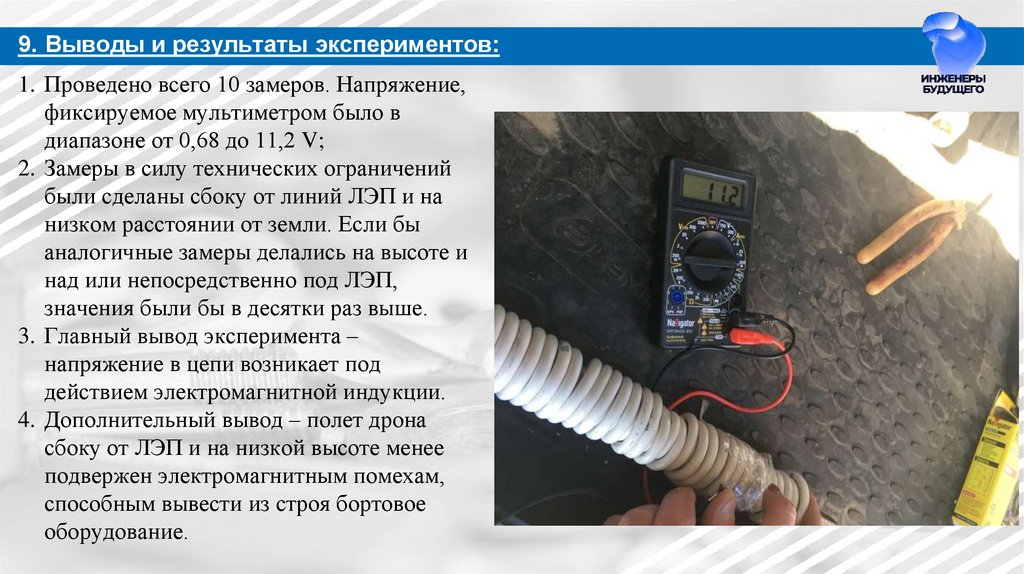
9.
9. Выводы и результаты экспериментов:1. Проведено всего 10 замеров. Напряжение,
фиксируемое мультиметром было в
диапазоне от 0,68 до 11,2 V;
2. Замеры в силу технических ограничений
были сделаны сбоку от линий ЛЭП и на
низком расстоянии от земли. Если бы
аналогичные замеры делались на высоте и
над или непосредственно под ЛЭП,
значения были бы в десятки раз выше.
3. Главный вывод эксперимента –
напряжение в цепи возникает под
действием электромагнитной индукции.
4. Дополнительный вывод – полет дрона
сбоку от ЛЭП и на низкой высоте менее
подвержен электромагнитным помехам,
способным вывести из строя бортовое
оборудование.
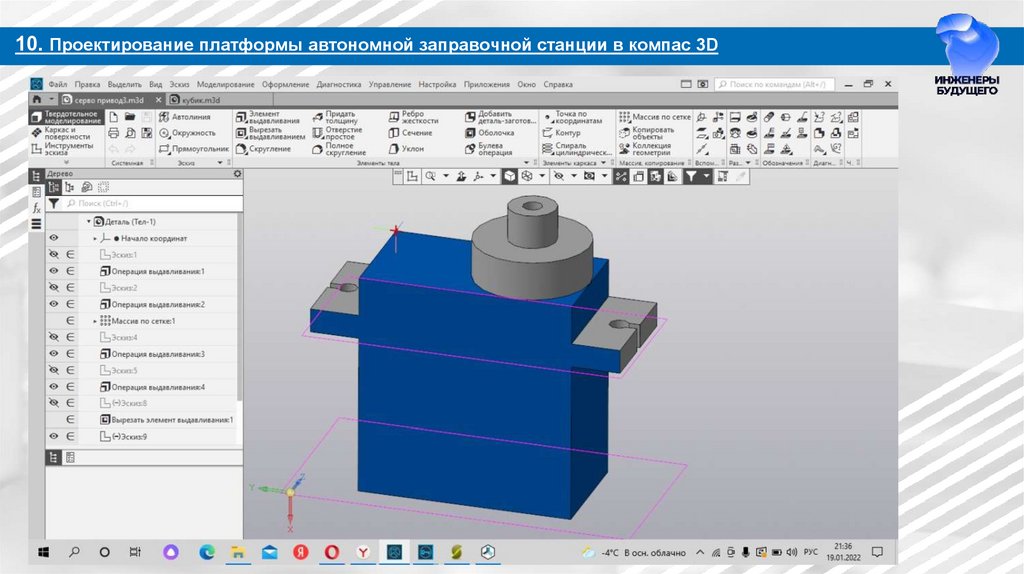
10.
10. Проектирование платформы автономной заправочной станции в компас 3D11.
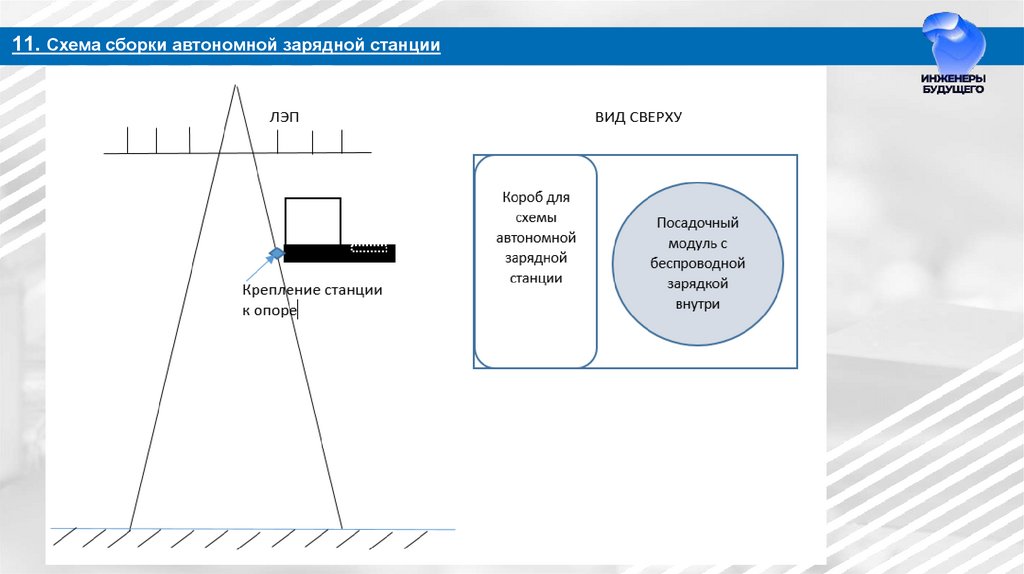
11. Схема сборки автономной зарядной станции12.
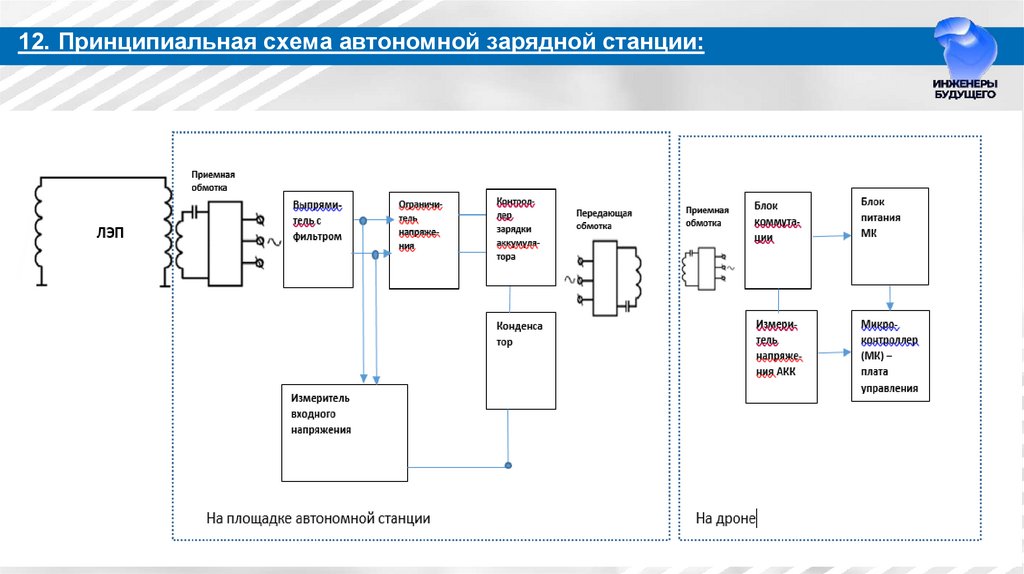
12. Принципиальная схема автономной зарядной станции:13.
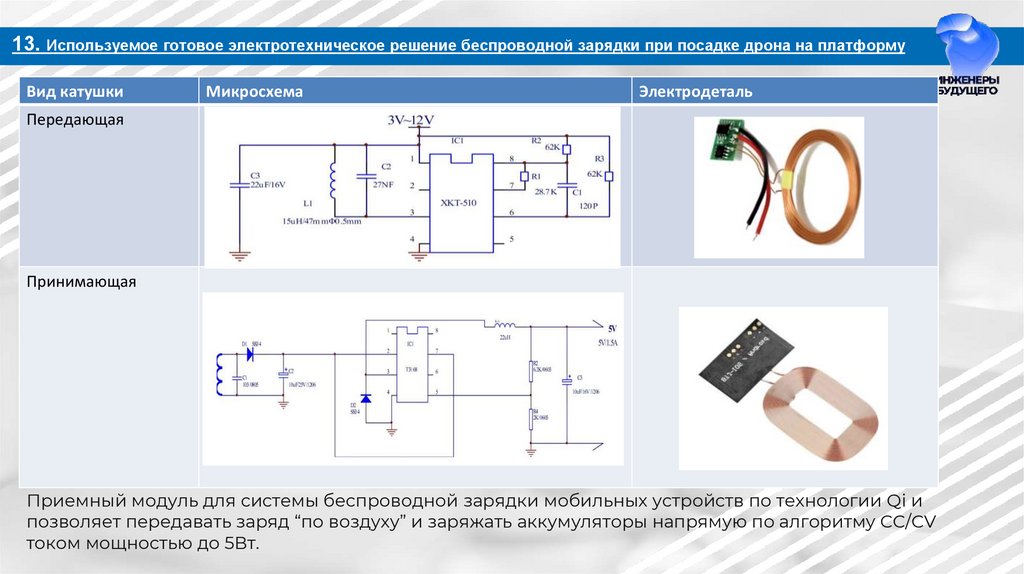
13. Используемое готовое электротехническое решение беспроводной зарядки при посадке дрона на платформуВид катушки
Микросхема
Электродеталь
Передающая
Принимающая
Приемный модуль для системы беспроводной зарядки мобильных устройств по технологии Qi и
позволяет передавать заряд “по воздуху” и заряжать аккумуляторы напрямую по алгоритму CC/CV
током мощностью до 5Вт.
14.
14. Сравнительный анализ существующих решений на рынке :Наименование
готового решения
Фото
Ссылка на описание
Airobotics
Сравнение с проектируемой станцией:
Сравнительные преимущества проекта
Дозарядка будет организована вдоль всей протяженности ЛЭП, в то
время как готовое решение Airobotics само требует генерации энергии
или подключение к сети;
Относительно низкая стоимость;
Относительно малые габариты.
Функциональное предназначение
Центральной частью разработки является
специальная «авиабаза», которая служит в
качестве посадочной станции с возможностью
автономной зарядки дронов. Роботизированная
рука, установленная на станции, самостоятельно
снимает разряженный аккумулятор с беспилотника
и устанавливает новую батарею, что позволит
дронам летать постоянно без помощи человека.
Стоит отметить, что роботизированная рука может
также менять полезную нагрузку, установленную
на дроне.
Сравнительные недостатки нашего
проекта
Низкий уровень роботизации
15.
15. Сравнительный анализ существующих решений на рынке :Наименование
готового решения
Фото
Ссылка на описание
IDIPLOYER MP2.1
(Великобритания)
Сравнение с проектируемой станцией:
Сравнительные преимущества проекта
Дозарядка будет организована вдоль всей протяженности ЛЭП, в то
время как готовое решение Airobotics само требует генерации энергии
или подключение к сети;
Относительно низкая стоимость;
Относительно малые габариты.
Функциональное предназначение
Док-станция на базе контактной зарядки,
основанная на простом и прочном дизайне,
MP2.1 является идеальным выбором для
крупномасштабного развертывания парков DJI
Mavic 2. Шасси оснащено антеннами дальнего
действия и светодиодными лампами для лучшей
связи и визуального оповещения в режиме
реального времени, соответственно. Станция
может быть закреплена на любой поверхности,
такой как крыши или транспортные средства, и
содержит электромагнитные замки для
предотвращения кражи.
Сравнительные недостатки нашего
проекта
Нет промышленных испытаний
16.
16. Сравнительный анализ существующих решений на рынке :Наименование
готового решения
Фото
Skyport DP5
дрон бокс
ангар
Сравнение с проектируемой станцией:
Сравнительные преимущества проекта
Относительно низкая стоимость;
Относительно малые габариты.
Ссылка на описание
Функциональное предназначение
Внутри коробки для дронов Skyport DP5 вы найдете
отмеченную наградами систему Skycharge, самую мощную
и легкую систему зарядки аккумуляторов на рынке,
гарантированно обеспечивающую 40 000 безотказных
циклов быстрой и эффективной зарядки аккумулятора.
Соединение между дроном и зарядной площадкой
происходит во время посадки, без использования
дополнительных движущихся частей. Конструкция
платформы, в сочетании с занимаемыми контактами,
обеспечивает самую компактную и легкую интеграцию с
любым дроном.
Сравнительные недостатки нашего
проекта
Нет промышленных испытаний
17.
17. Выводы и результаты проекта:1. Изучена база патентных бюро и источников литературы;
2. Составлена принципиальная схема станции дозарядки дрона;
3. Составлена схема сборки и спецификация автономной зарядной станции;
4. Смоделирован опытный образец станции в Компас 3D;
5. Проведены опыты по исследованию явления электромагнитной индукции в
зоне ЛЭП в электрической цепи с соленоидом;
6. Проведен сравнительный анализ по существующим на рынке готовым
решениям автономных зарядных станций.
18.
18. Планы по дальнейшему развитию проекта:1. Коммерциализация проекта:
- разработка бизнес-плана,
- популяризация идей проекта, в том числе в научном сообществе:
- участие в конференциях
- написание научных статей
2. Поиск инвесторов:
- презентация для «бизнес-ангелов»
- участие в краунфандинговой платформе по свободному сбору средств
- подача заявки на гранд
3. Оформление заявки на полезную модель совместно с УРФУ
19.
19. Список использованной литературы:1. Энерговестник. Использование беспилотных летательных аппаратов в ТЭК.//energovestnik.ru,
22.10.2015.
2.
А. Валиев. Эксплуатация беспилотников
в электросетевом комплексе России.//
«Электроэнергия», № 6, 2011 г.
3. Инновационные и отраслевые решения с использование беспилотников (проект
СъемкаСВоздуха.РФ) - http://rusdrone.ru/otraslevye-resheniya/monitoring-lep.html
4.
Барбасов В.К., Орлов П.Ю., Руднев П.Р., Гречищев А.В. Применение малых беспилотных
летательных аппаратов для съемки местности и подготовки геоинформационного контента в
чрезвычайных ситуациях // Интерэкспо Гео-Сибирь. 2013. Т. 7. № 2. С. 61-66.
6.
Барбасов В.К., Гречищев А.В. Мультироторные беспилотные летательные аппараты,
представленные на российском рынке: обзор // Инженерные изыскания. 2014. № 8. С. 27-31.
7. Шабанова А.Р., Толстой И.М., Лебедев И.В. Способ построения безопасных траекторий движения
беспилотного летательного аппарата при мониторинге линий электропередач в условиях влияния
электромагнитных полей - Способ построения безопасных траекторий движения беспилотного
летательного аппарата при мониторинге линий электропередач в условиях влияния
электромагнитных полей (cyberleninka.ru)
8. Сайт компании Геоскан - https://www.geoscan.aero/
20.
КОНТАКТНАЯ КАРТАБаженова Светлана Александровна – г.Екатеринбург,
Лицей 110 им. Л.К. Гришиной, 10 «М» класс
Телефон для связи: 8-950-547-62-02
Silver.130307ab@gmail.com
Баженова Алёна Александровна – г.Екатеринбург,
Лицей 110 им. Л.К. Гришиной, 10 «М» класс
Телефон для связи: 8-950-547-60-27
Shadow.130307ws@gmail.com
СПАСИБО ЗА ВНИМАНИЕ!