












 software
softwareSimilar presentations:





")




Методика бесконтактного сканирования, реверс-инжиниринг, оборудование
1.
Методика бесконтактногосканирования,
реверс-инжиниринг,
оборудование
Докладчик:
Ведущий инженер-конструктор
НИЦ «Курчатовский
институт» - ВИАМ
К.И. Светогоров
2.
3D-сканер3D-сканер –
это устройство, с помощью
которого можно создавать
точные трехмерные
модели реальных
объектов.
Он преобразует объект в
его цифровое
изображение подобно
тому, как простой 2Dсканер преобразует
изображение на листе
бумаги в изображение на
компьютере.
2
3.
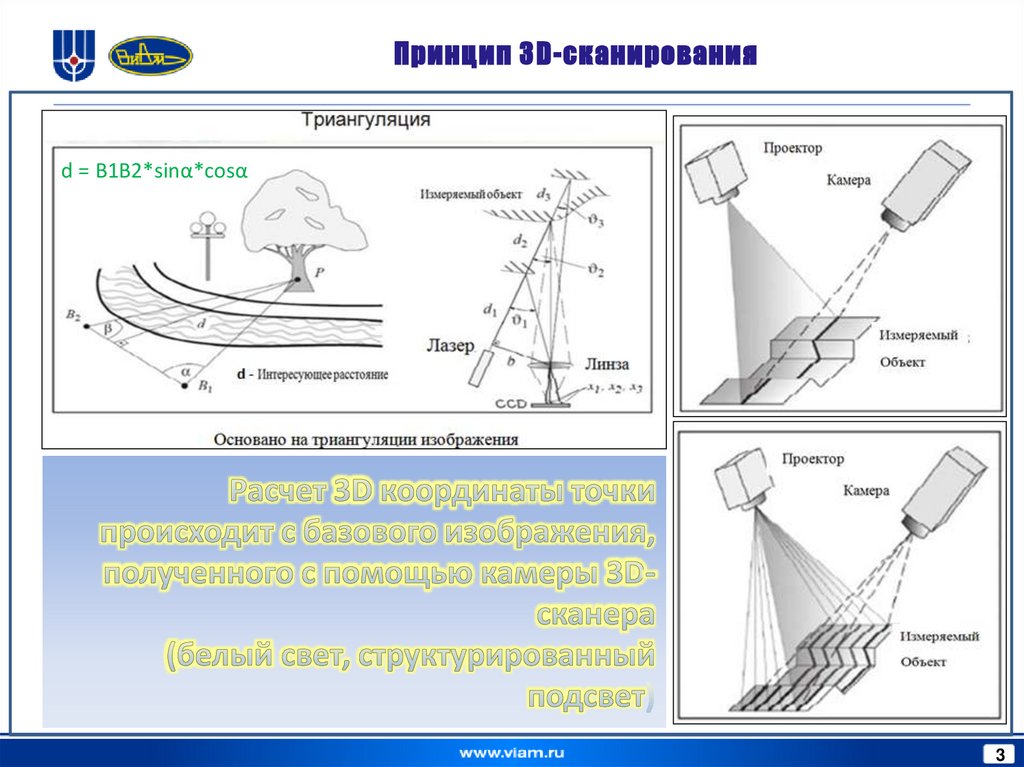
Принцип 3D-сканированияd = B1B2*sinα*cosα
3
4.
Методы трехмерного сканированияСканирование или контроль
геометрических размеров
производится контактным
способом.
Щуп медленно подходит к
измеряемому объекту,
регистрируя малейшее касание.
Бесконтактные методы сканирования
имеют следующие преимущества:
- более высокая скорость сканирования;
- возможность (чаще всего) сканировать
поднутрения и малые отверстия;
- установки мобильны и не массивны
4
5.
Контактные сканерыЭти устройства напоминают промышленные ЧПУ станки, на массивном
основании, но вместо шпинделя крепится измерительная головка с рубиновым
шариком на конце. Сканирование или контроль геометрических размеров
производится контактным способом. Щуп медленно подходит к измеряемому
объекту, регистрируя малейшее касание.
5
6.
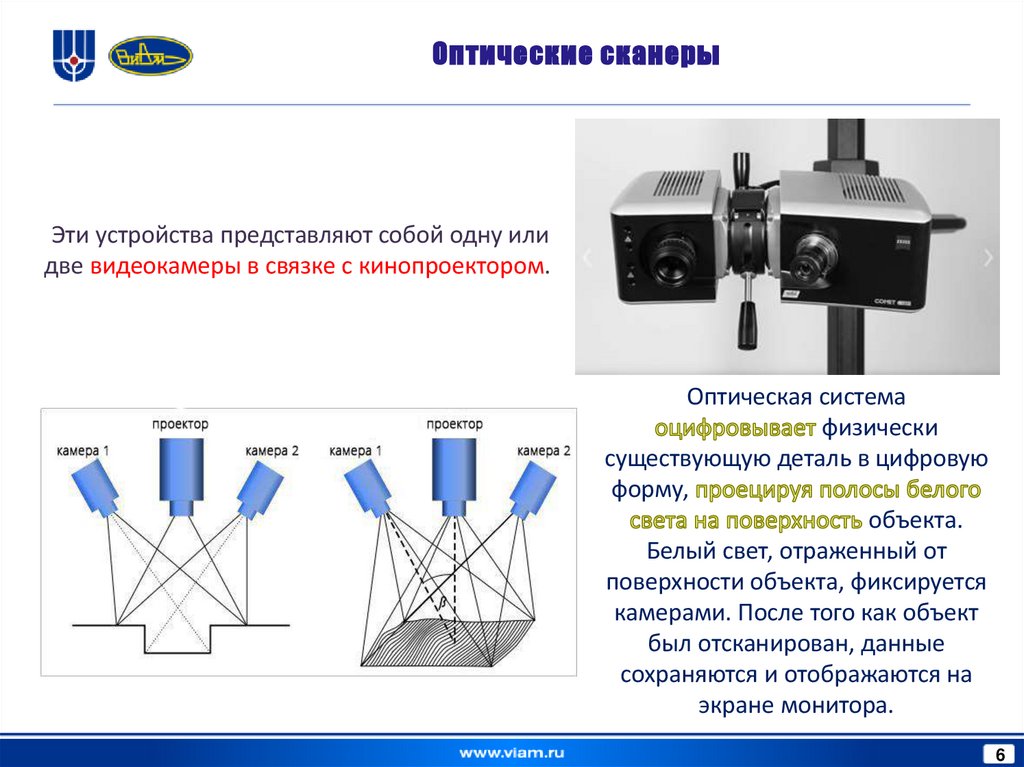
Оптические сканерыЭти устройства представляют собой одну или
две видеокамеры в связке с кинопроектором.
Оптическая система
физически
существующую деталь в цифровую
форму,
объекта.
Белый свет, отраженный от
поверхности объекта, фиксируется
камерами. После того как объект
был отсканирован, данные
сохраняются и отображаются на
экране монитора.
6
7.
Лазерные сканерыЛазерное 3D-cканирование
основано на проецировании
лазерного луча на предмет 3D
сканирования.
Все искажения воспринимаются
измерительной камерой,
которая отслеживает
физическое положение
лазера.
Данные передаются в компьютер,
там они буквально
вычерчиваются лазером.
7
8.
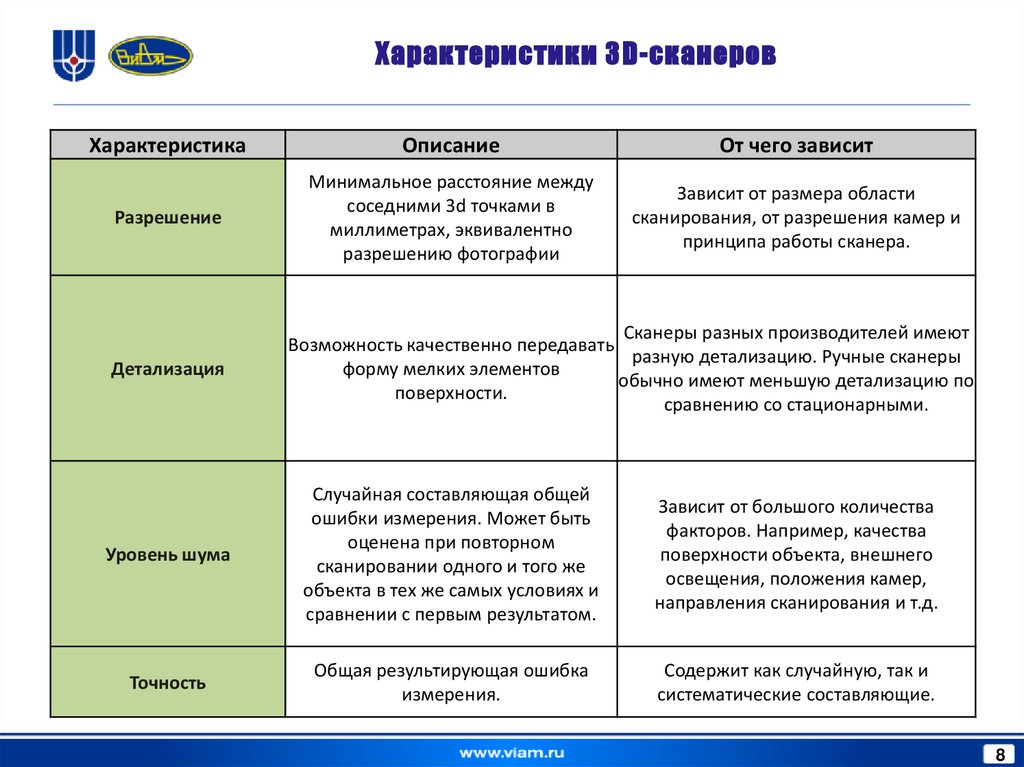
Характеристики 3D-сканеровХарактеристика
Описание
От чего зависит
Разрешение
Минимальное расстояние между
соседними 3d точками в
миллиметрах, эквивалентно
разрешению фотографии
Зависит от размера области
сканирования, от разрешения камер и
принципа работы сканера.
Детализация
Сканеры разных производителей имеют
Возможность качественно передавать
разную детализацию. Ручные сканеры
форму мелких элементов
обычно имеют меньшую детализацию по
поверхности.
сравнению со стационарными.
Уровень шума
Случайная составляющая общей
ошибки измерения. Может быть
оценена при повторном
сканировании одного и того же
объекта в тех же самых условиях и
сравнении с первым результатом.
Зависит от большого количества
факторов. Например, качества
поверхности объекта, внешнего
освещения, положения камер,
направления сканирования и т.д.
Точность
Общая результирующая ошибка
измерения.
Содержит как случайную, так и
систематические составляющие.
8
9.
Условия сканированияИдеальные условия:
Неидеальные условия:
Результат неидеальности:
Фрагменты, снятые с разных ракурсов,
искажены и плохо совмещаются
Любое движение приводит к
Присутствует движение объекта или
Объект неподвижен
искажению результата (обычно в виде
сканера во время сканирования
мелких волн)
Сканер работает медленнее,
возрастает шум в данных, иногда
Объект светлый
Объект тёмный
матирование такого объекта
становится обязательным
Без покрытия матирующим спреем
Объект бликующий, полупрозрачный
Объект матовый
результат плохой или
или с блёстками
неудовлетворительный
Острые рёбра всегда немного
сглаживаются, желательно правильно
Объект гладкий
Объект с острыми рёбрами
располагать сканер относительно таких
рёбер
Объект с отверстиями, краями
Край тонкого листа на 3d данных всегда
Объект без отверстий, краёв и
листового материала или
обрывается, не доходя до реальной
поднутрений
поднутрениями
границы объекта
Отдельные фрагменты невозможно
качественно совместить, основываясь
Объект с вырожденностью вдоль
Объект с хорошими геометрическими
только на геометрических
одного или нескольких направлений,
особенностями
особенностях, точность без
например плоскость, шар, рельс
использования маркеров становится
неконтролируемой
Объект твёрдый
Объект деформируемый.
9
10.
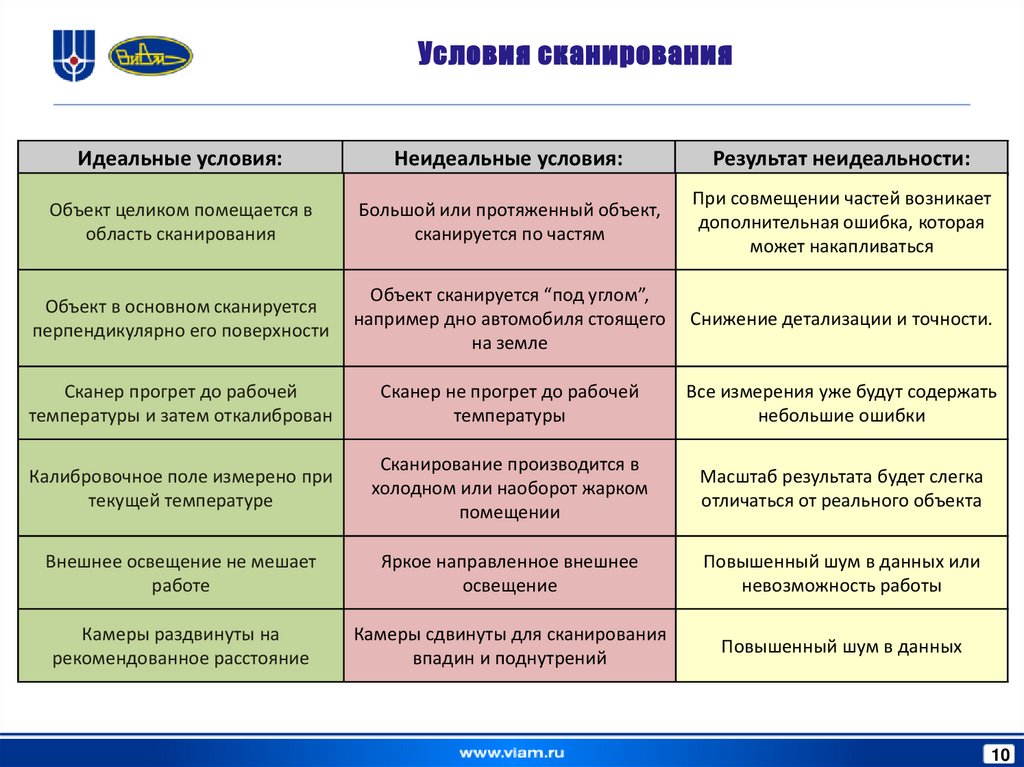
Условия сканированияИдеальные условия:
Неидеальные условия:
Результат неидеальности:
Объект целиком помещается в
область сканирования
Большой или протяженный объект,
сканируется по частям
При совмещении частей возникает
дополнительная ошибка, которая
может накапливаться
Объект в основном сканируется
перпендикулярно его поверхности
Объект сканируется “под углом”,
например дно автомобиля стоящего
на земле
Снижение детализации и точности.
Сканер прогрет до рабочей
температуры и затем откалиброван
Сканер не прогрет до рабочей
температуры
Все измерения уже будут содержать
небольшие ошибки
Калибровочное поле измерено при
текущей температуре
Сканирование производится в
холодном или наоборот жарком
помещении
Масштаб результата будет слегка
отличаться от реального объекта
Внешнее освещение не мешает
работе
Яркое направленное внешнее
освещение
Повышенный шум в данных или
невозможность работы
Камеры раздвинуты на
рекомендованное расстояние
Камеры сдвинуты для сканирования
впадин и поднутрений
Повышенный шум в данных
10
11.
Области применения 3D-сканеров• Промышленное производство
• Дизайн
• Игры и спецэффекты
• Культура и искусство
• Биометрия
• Медицина
11
12.
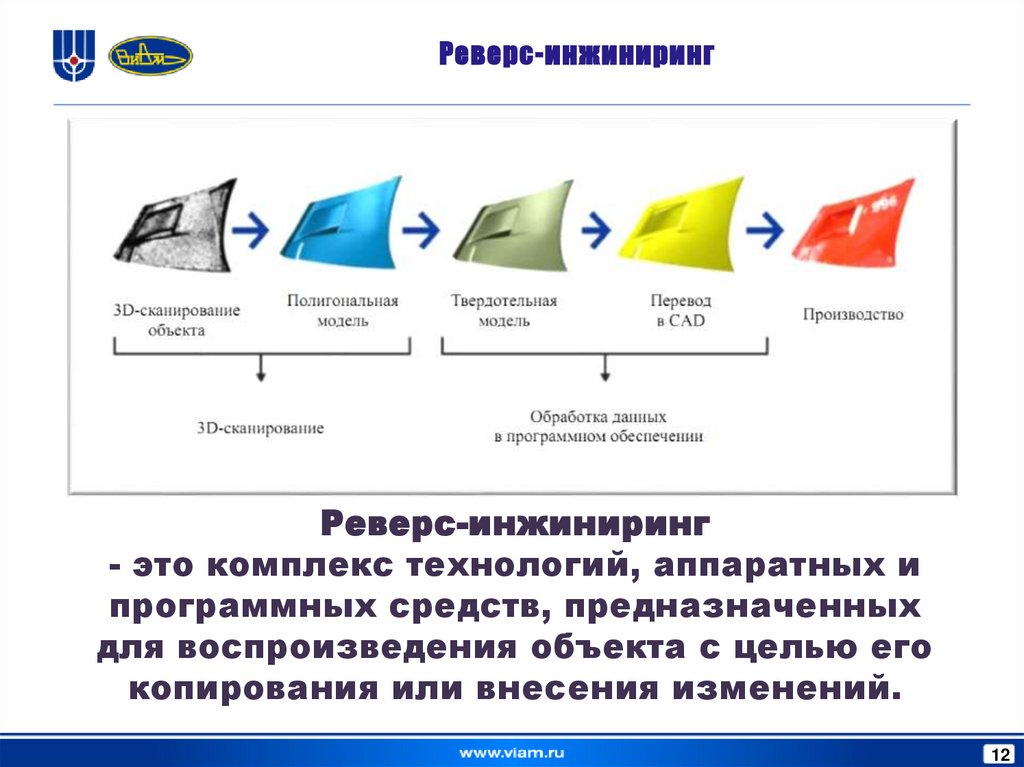
Реверс-инжинирингРеверс-инжиниринг
- это комплекс технологий, аппаратных и
программных средств, предназначенных
для воспроизведения объекта с целью его
копирования или внесения изменений.
12
13.
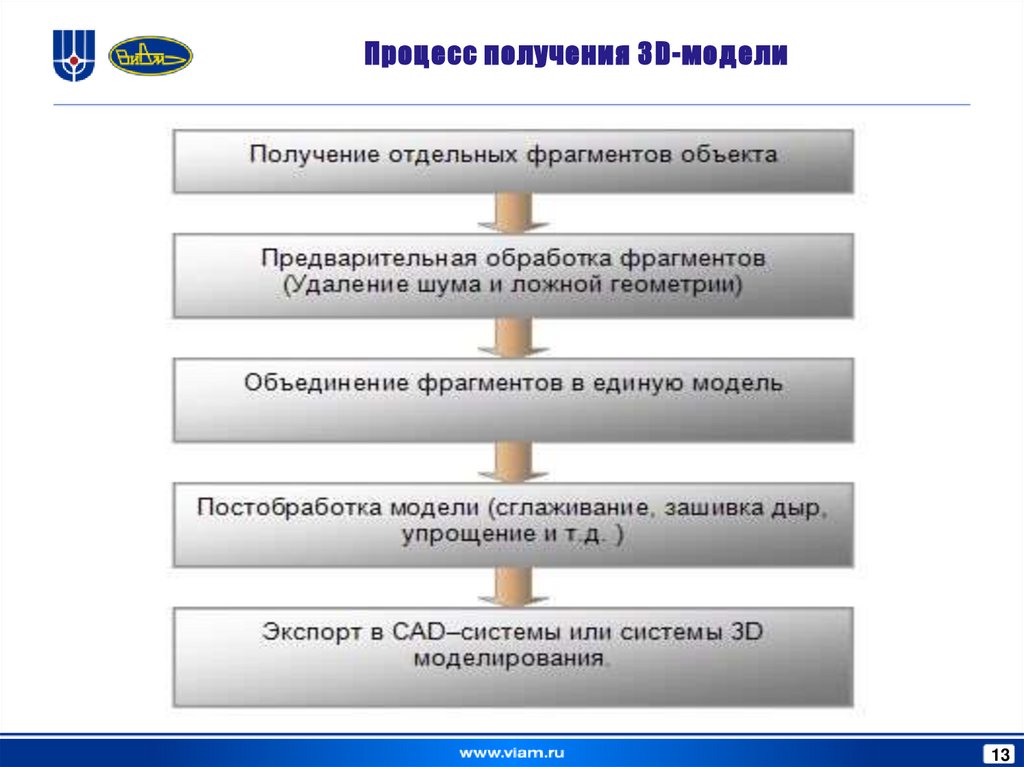
Процесс получения 3D-модели13
14.
Получение отдельных фрагментов лопаткиСканер подсвечивает изделие лазером или структурированным
подсветом и получает информацию о расстоянии до
поверхностей объекта. На основе этой информации строится
участок поверхностной модели, который представляет собой
облако миллионов точек.
14
15.
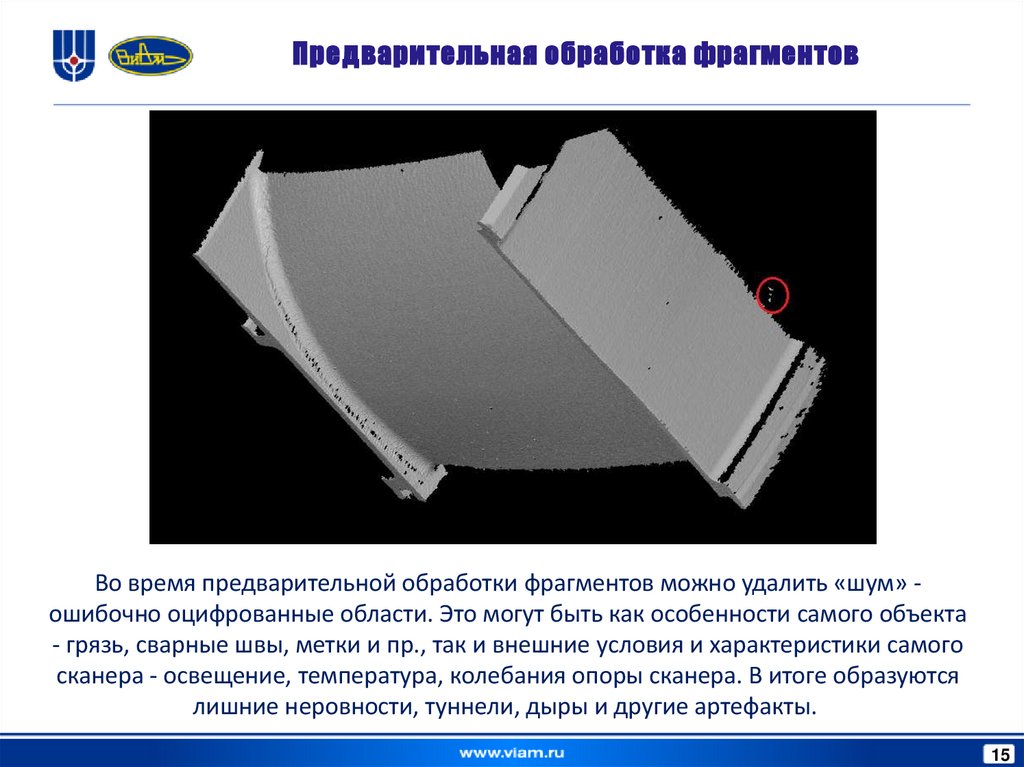
Предварительная обработка фрагментовВо время предварительной обработки фрагментов можно удалить «шум» ошибочно оцифрованные области. Это могут быть как особенности самого объекта
- грязь, сварные швы, метки и пр., так и внешние условия и характеристики самого
сканера - освещение, температура, колебания опоры сканера. В итоге образуются
лишние неровности, туннели, дыры и другие артефакты.
15
16.
Объединение фрагментов в единую модельПосле получения достаточного количества участков
программа, которая поставляется вместе со сканером,
сшивает их в один объект в автоматическом или ручном
режиме
16
17.
Постобработка моделиВ процессе обработки над моделью может быть произведен ряд операций:
зашиваются дыры;
выравниваются поверхности;
удаляется шум;
модель правильно ориентируется;
уменьшается количество треугольников
17
18.
Постобработка моделиВ процессе обработки над моделью может быть произведен ряд операций:
зашиваются дыры;
выравниваются поверхности;
удаляется шум;
модель правильно ориентируется;
уменьшается количество треугольников
18
19.
Экспорт моделиНа данном этапе на основе полигональной модели происходит построение
нормального твердого тела.
Используемые операции: вытягивание эскизов, деление на области, поиск
вытянутых областей, построение замкнутого эскиза.
При правильной обработке модели на выходе мы получаем модель с деревом
построений, пригодную для дальнейшей обработки в CAD-системе.
19
20.
Измерение размеров профиля лопаткиС помощью 3D-сканера можно инспектировать не только сами лопатки, но
и восковые формы на усадку, ребра, пузыри. Это позволяет выпускать
максимально качественные отливки лопаток.
Другая задача – измерение основных размеров профиля сечения лопаток.
Вы сможете произвести анализ частичного сжатия, деформации и изгиба.
Анализ износа форм и инструмента делает возможным обнаружение
малейших отклонений от производственного процесса на ранней стадии.
При обновлении или модификации турбины с помощью 3D-сканеров Вы
получите данные о геометрии лопаток, подлежащих замене.
20
21.
Спасибоза внимание!