

 informatics
informaticsSimilar presentations:










Моделирование сложных объектов (9 класс)
1.
Труд/(технология) 9 классМоделирование сложных объектов
2.
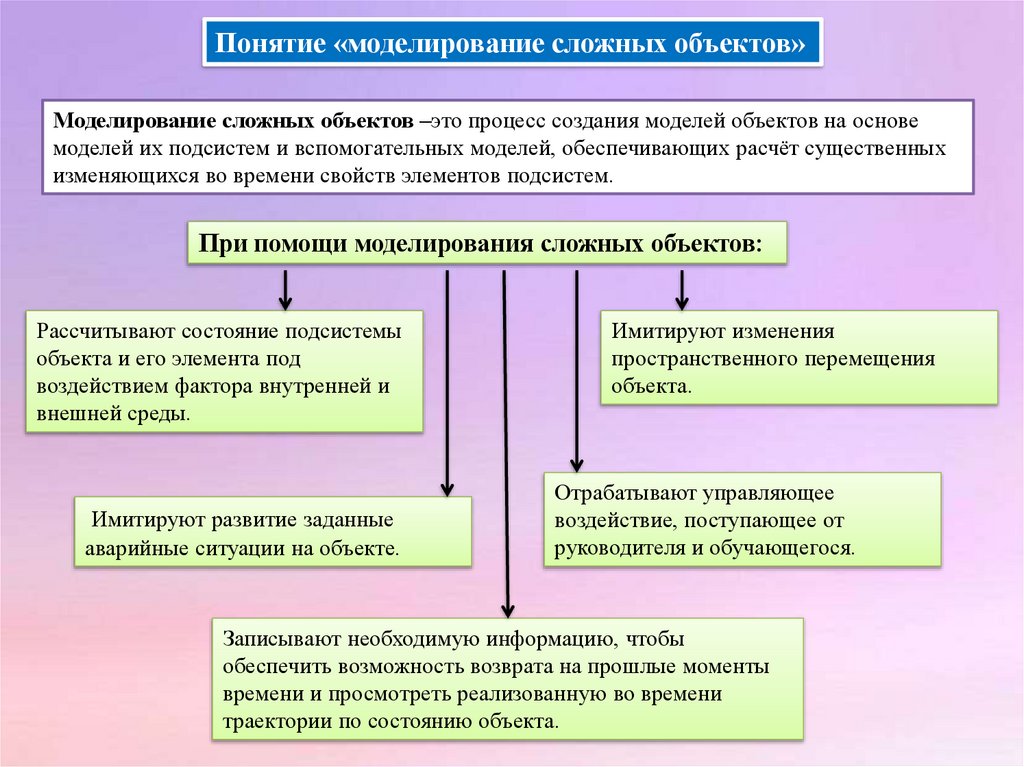
Понятие «моделирование сложных объектов»Моделирование сложных объектов –это процесс создания моделей объектов на основе
моделей их подсистем и вспомогательных моделей, обеспечивающих расчёт существенных
изменяющихся во времени свойств элементов подсистем.
При помощи моделирования сложных объектов:
Рассчитывают состояние подсистемы
объекта и его элемента под
воздействием фактора внутренней и
внешней среды.
Имитируют развитие заданные
аварийные ситуации на объекте.
Имитируют изменения
пространственного перемещения
объекта.
Отрабатывают управляющее
воздействие, поступающее от
руководителя и обучающегося.
Записывают необходимую информацию, чтобы
обеспечить возможность возврата на прошлые моменты
времени и просмотреть реализованную во времени
траектории по состоянию объекта.
3.
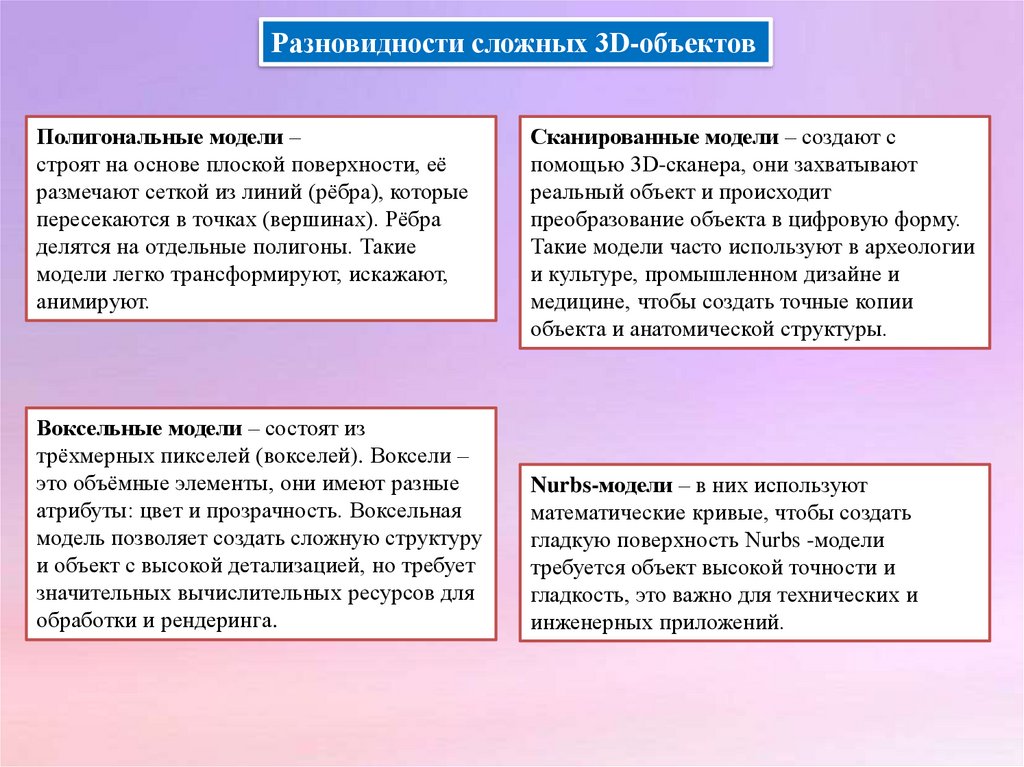
Разновидности сложных 3D-объектовПолигональные модели –
строят на основе плоской поверхности, её
размечают сеткой из линий (рёбра), которые
пересекаются в точках (вершинах). Рёбра
делятся на отдельные полигоны. Такие
модели легко трансформируют, искажают,
анимируют.
Воксельные модели – состоят из
трёхмерных пикселей (вокселей). Воксели –
это объёмные элементы, они имеют разные
атрибуты: цвет и прозрачность. Воксельная
модель позволяет создать сложную структуру
и объект с высокой детализацией, но требует
значительных вычислительных ресурсов для
обработки и рендеринга.
Сканированные модели – создают с
помощью 3D-сканера, они захватывают
реальный объект и происходит
преобразование объекта в цифровую форму.
Такие модели часто используют в археологии
и культуре, промышленном дизайне и
медицине, чтобы создать точные копии
объекта и анатомической структуры.
Nurbs-модели – в них используют
математические кривые, чтобы создать
гладкую поверхность Nurbs -модели
требуется объект высокой точности и
гладкость, это важно для технических и
инженерных приложений.
4.
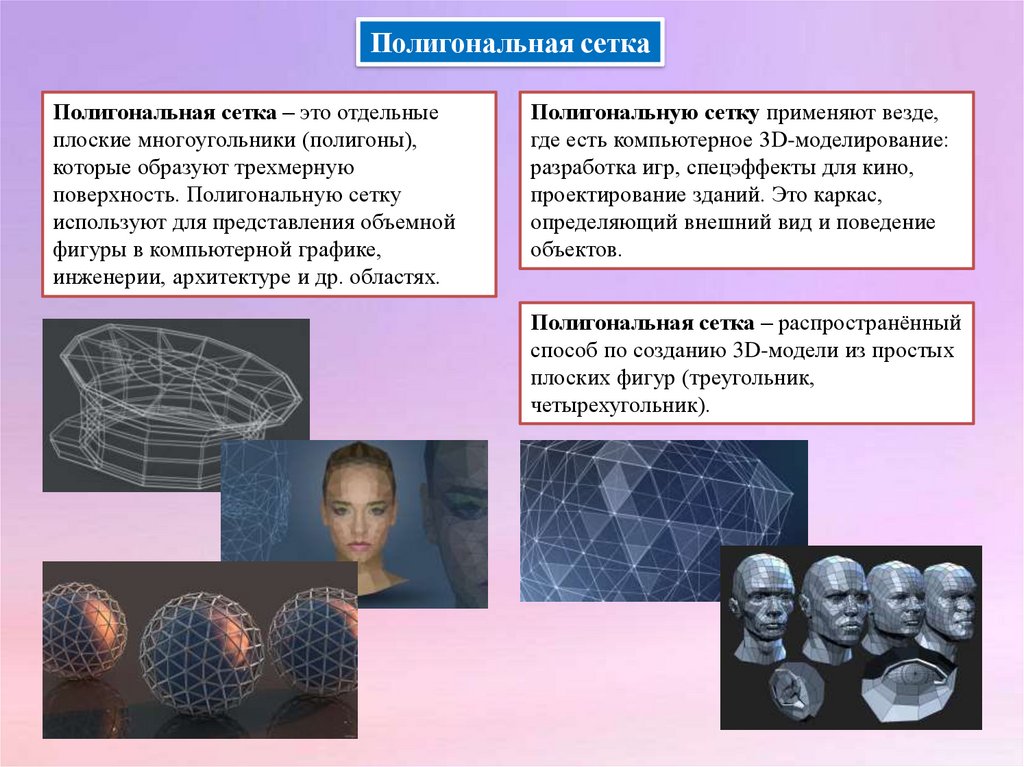
Полигональная сеткаПолигональная сетка – это отдельные
плоские многоугольники (полигоны),
которые образуют трехмерную
поверхность. Полигональную сетку
используют для представления объемной
фигуры в компьютерной графике,
инженерии, архитектуре и др. областях.
Полигональную сетку применяют везде,
где есть компьютерное 3D-моделирование:
разработка игр, спецэффекты для кино,
проектирование зданий. Это каркас,
определяющий внешний вид и поведение
объектов.
Полигональная сетка – распространённый
способ по созданию 3D-модели из простых
плоских фигур (треугольник,
четырехугольник).
5.
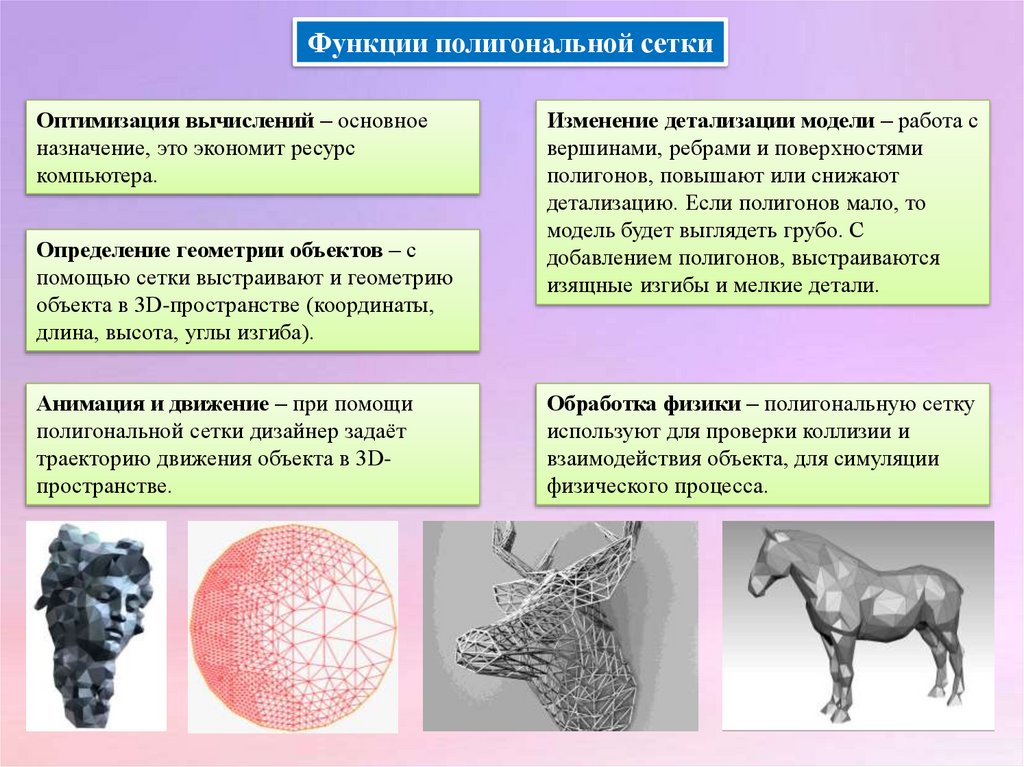
Функции полигональной сеткиОптимизация вычислений – основное
назначение, это экономит ресурс
компьютера.
Определение геометрии объектов – с
помощью сетки выстраивают и геометрию
объекта в 3D-пространстве (координаты,
длина, высота, углы изгиба).
Анимация и движение – при помощи
полигональной сетки дизайнер задаёт
траекторию движения объекта в 3Dпространстве.
Изменение детализации модели – работа с
вершинами, ребрами и поверхностями
полигонов, повышают или снижают
детализацию. Если полигонов мало, то
модель будет выглядеть грубо. С
добавлением полигонов, выстраиваются
изящные изгибы и мелкие детали.
Обработка физики – полигональную сетку
используют для проверки коллизии и
взаимодействия объекта, для симуляции
физического процесса.
6.
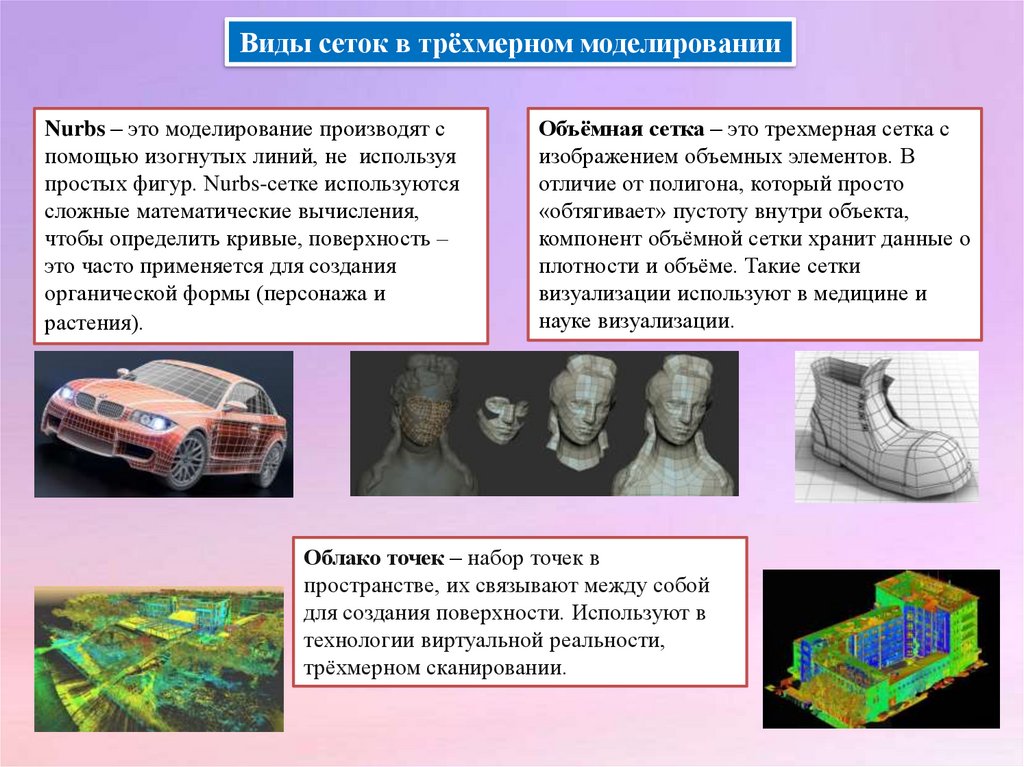
Виды сеток в трёхмерном моделированииNurbs – это моделирование производят с
помощью изогнутых линий, не используя
простых фигур. Nurbs-сетке используются
сложные математические вычисления,
чтобы определить кривые, поверхность –
это часто применяется для создания
органической формы (персонажа и
растения).
Объёмная сетка – это трехмерная сетка с
изображением объемных элементов. В
отличие от полигона, который просто
«обтягивает» пустоту внутри объекта,
компонент объёмной сетки хранит данные о
плотности и объёме. Такие сетки
визуализации используют в медицине и
науке визуализации.
Облако точек – набор точек в
пространстве, их связывают между собой
для создания поверхности. Используют в
технологии виртуальной реальности,
трёхмерном сканировании.
7.
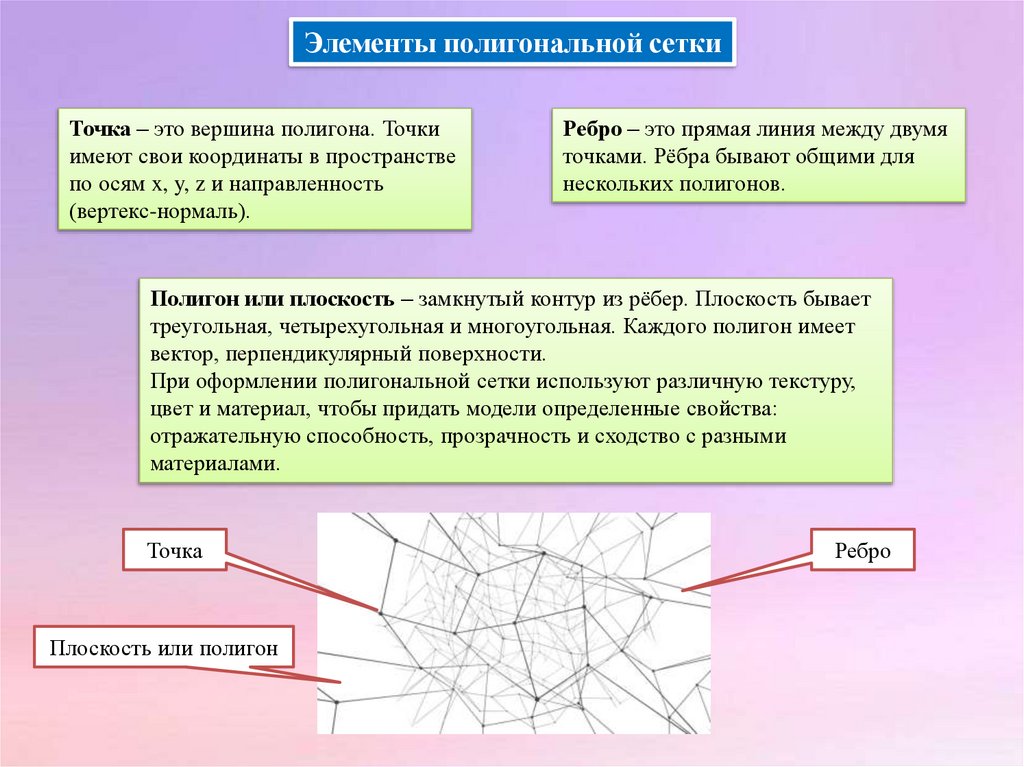
Элементы полигональной сеткиТочка – это вершина полигона. Точки
имеют свои координаты в пространстве
по осям x, y, z и направленность
(вертекс-нормаль).
Ребро – это прямая линия между двумя
точками. Рёбра бывают общими для
нескольких полигонов.
Полигон или плоскость – замкнутый контур из рёбер. Плоскость бывает
треугольная, четырехугольная и многоугольная. Каждого полигон имеет
вектор, перпендикулярный поверхности.
При оформлении полигональной сетки используют различную текстуру,
цвет и материал, чтобы придать модели определенные свойства:
отражательную способность, прозрачность и сходство с разными
материалами.
Точка
Плоскость или полигон
Ребро
8.
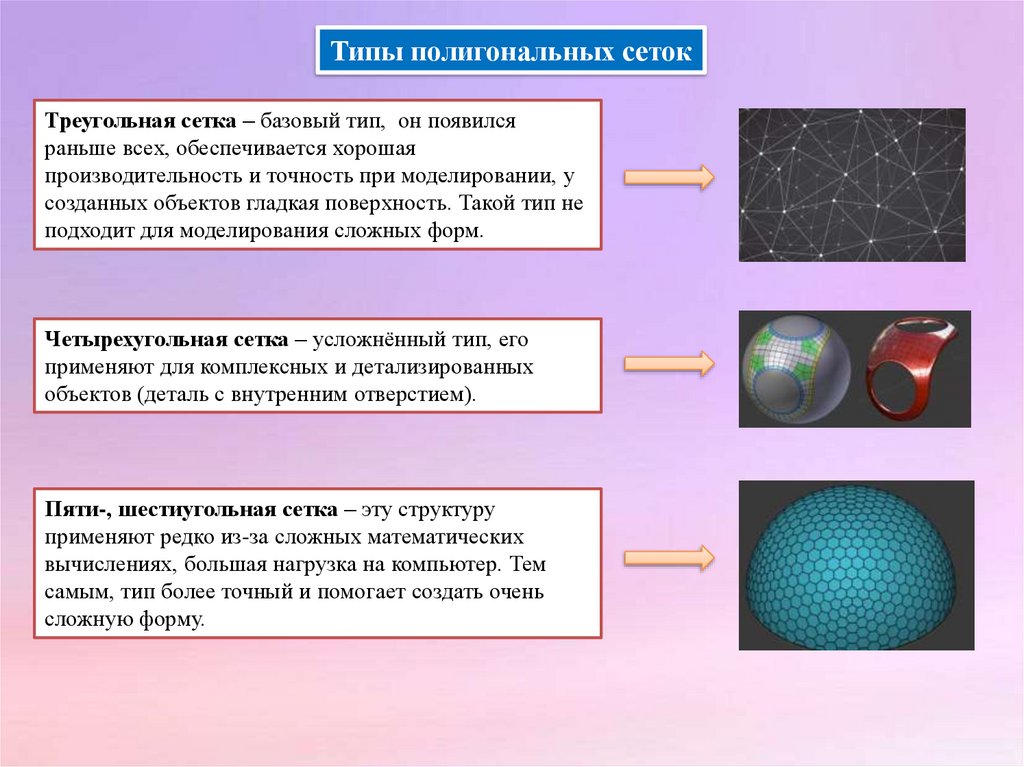
Типы полигональных сетокТреугольная сетка – базовый тип, он появился
раньше всех, обеспечивается хорошая
производительность и точность при моделировании, у
созданных объектов гладкая поверхность. Такой тип не
подходит для моделирования сложных форм.
Четырехугольная сетка – усложнённый тип, его
применяют для комплексных и детализированных
объектов (деталь с внутренним отверстием).
Пяти-, шестиугольная сетка – эту структуру
применяют редко из-за сложных математических
вычислениях, большая нагрузка на компьютер. Тем
самым, тип более точный и помогает создать очень
сложную форму.
9.
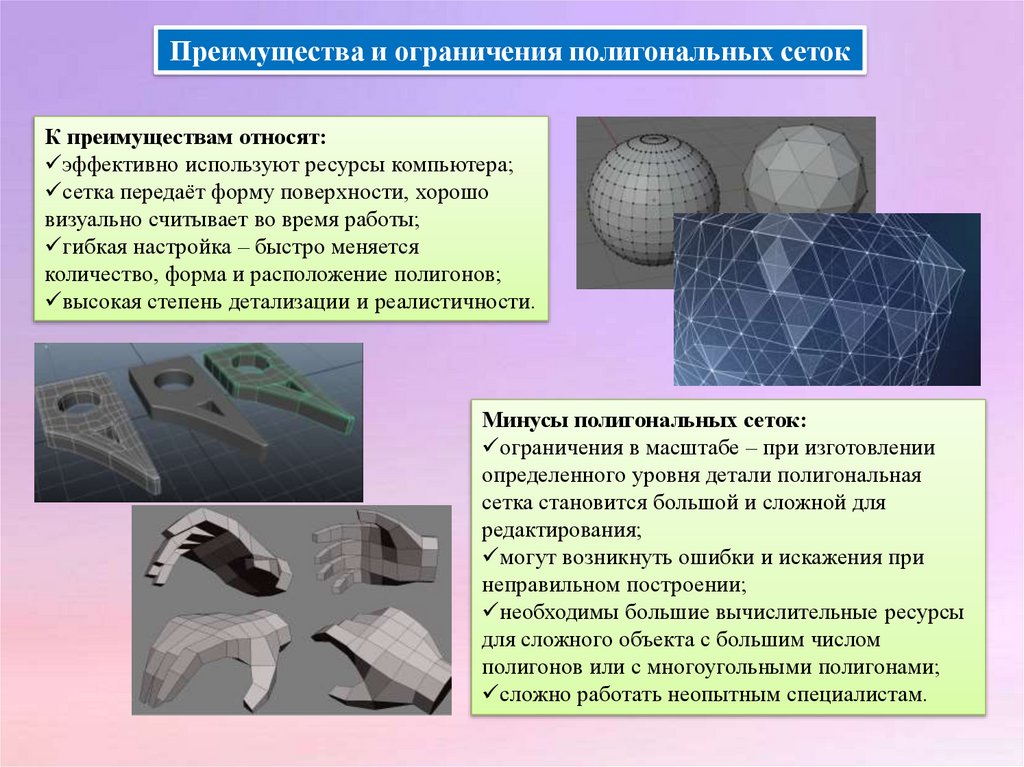
Преимущества и ограничения полигональных сетокК преимуществам относят:
эффективно используют ресурсы компьютера;
сетка передаёт форму поверхности, хорошо
визуально считывает во время работы;
гибкая настройка – быстро меняется
количество, форма и расположение полигонов;
высокая степень детализации и реалистичности.
Минусы полигональных сеток:
ограничения в масштабе – при изготовлении
определенного уровня детали полигональная
сетка становится большой и сложной для
редактирования;
могут возникнуть ошибки и искажения при
неправильном построении;
необходимы большие вычислительные ресурсы
для сложного объекта с большим числом
полигонов или с многоугольными полигонами;
сложно работать неопытным специалистам.
10.
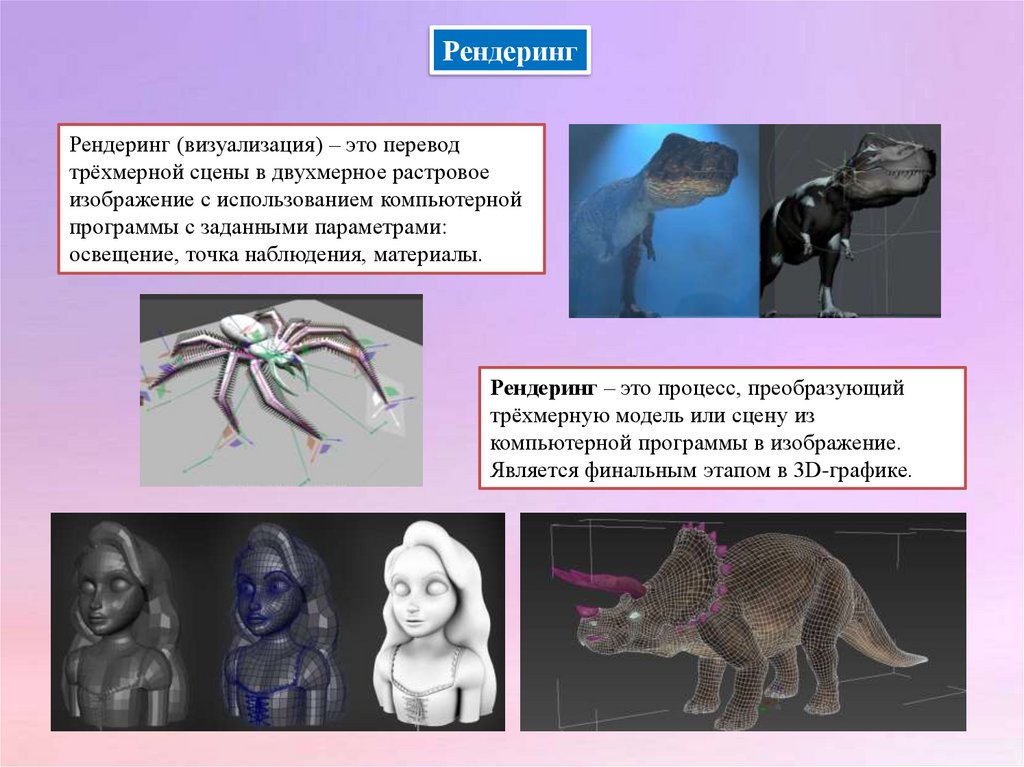
РендерингРендеринг (визуализация) – это перевод
трёхмерной сцены в двухмерное растровое
изображение с использованием компьютерной
программы с заданными параметрами:
освещение, точка наблюдения, материалы.
Рендеринг – это процесс, преобразующий
трёхмерную модель или сцену из
компьютерной программы в изображение.
Является финальным этапом в 3D-графике.
11.
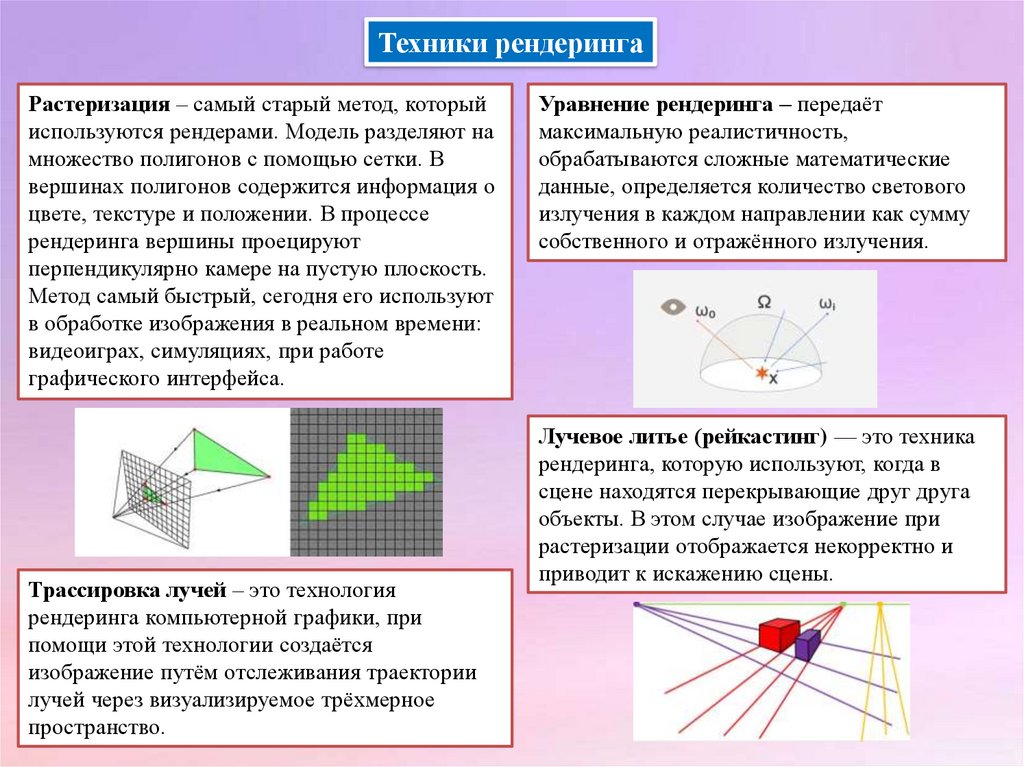
Техники рендерингаРастеризация – самый старый метод, который
используются рендерами. Модель разделяют на
множество полигонов с помощью сетки. В
вершинах полигонов содержится информация о
цвете, текстуре и положении. В процессе
рендеринга вершины проецируют
перпендикулярно камере на пустую плоскость.
Метод самый быстрый, сегодня его используют
в обработке изображения в реальном времени:
видеоиграх, симуляциях, при работе
графического интерфейса.
Трассировка лучей – это технология
рендеринга компьютерной графики, при
помощи этой технологии создаётся
изображение путём отслеживания траектории
лучей через визуализируемое трёхмерное
пространство.
Уравнение рендеринга – передаёт
максимальную реалистичность,
обрабатываются сложные математические
данные, определяется количество светового
излучения в каждом направлении как сумму
собственного и отражённого излучения.
Лучевое литье (рейкастинг) — это техника
рендеринга, которую используют, когда в
сцене находятся перекрывающие друг друга
объекты. В этом случае изображение при
растеризации отображается некорректно и
приводит к искажению сцены.
12.
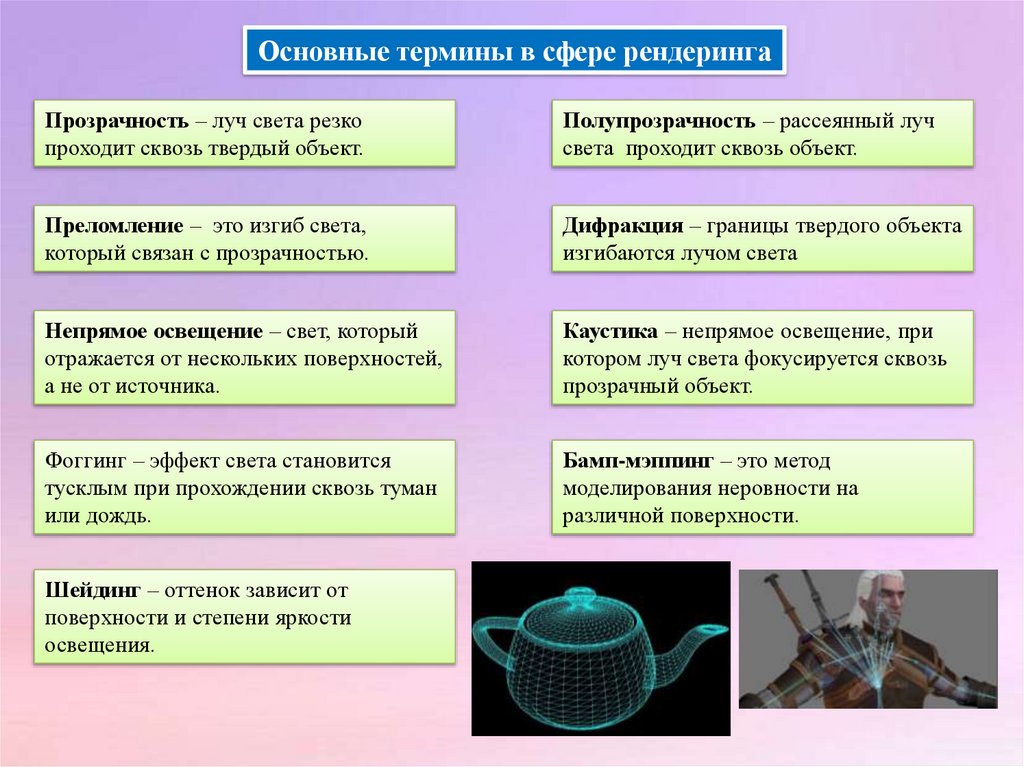
Основные термины в сфере рендерингаПрозрачность – луч света резко
проходит сквозь твердый объект.
Полупрозрачность – рассеянный луч
света проходит сквозь объект.
Преломление – это изгиб света,
который связан с прозрачностью.
Дифракция – границы твердого объекта
изгибаются лучом света
Непрямое освещение – свет, который
отражается от нескольких поверхностей,
а не от источника.
Каустика – непрямое освещение, при
котором луч света фокусируется сквозь
прозрачный объект.
Фоггинг – эффект света становится
тусклым при прохождении сквозь туман
или дождь.
Бамп-мэппинг – это метод
моделирования неровности на
различной поверхности.
Шейдинг – оттенок зависит от
поверхности и степени яркости
освещения.
13.
Воксельные моделиВоксельная модель – это объёмное изображение,
которое создано при помощи вокселей –
элементов, содержащие значения растра в
трёхмерном пространстве. Воксель – это аналог
двумерного пикселя для трёхмерного
пространства.
Воксельные модели часто используют в
визуализации и анализа медицинской и научной
информации. В завершении сканирования
медицинские устройства: сканеры компьютерной
томографии, трёхмерное УЗИ, МРТ, создают
послойную информацию. В завершении
сканирования создаётся воксельная модель,
значения вокселей отражают данные с
устройства.
В компьютерной графике воксели используют
как альтернативу полигонам. В компьютерной
игре воксели применяют для отрисовки
ландшафта и динамичной структуры.
14.
Сканированные 3D моделиСканированная 3D-модель – это цифровая
копия физической детали, полученной с помощью
3D-сканера. При сканировании устройством
регистрируются трёхмерные координаты
миллионов точек, создаётся точечное облако.
Затем, обрабатывается облако точек,
получают полигональную модель –
виртуальную копию детали в виде облака точек,
которые преобразованы в многоугольники
(полигоны).
3D-сканирование – это виртуальный вид модели
или детали или метод анализа реального объекта.
3D-сканер –это фотоаппарат, которым
фиксируются данные объектов, находящиеся в
поле его зрения. Для сбора данных 3D-сканер
имеет луч структурированный светом и камерой.
Им собираются данные, фиксируется форма и
размеры изделия, делает несколько его
фотографий. Затем фотографии соединяются
вместе.
15.
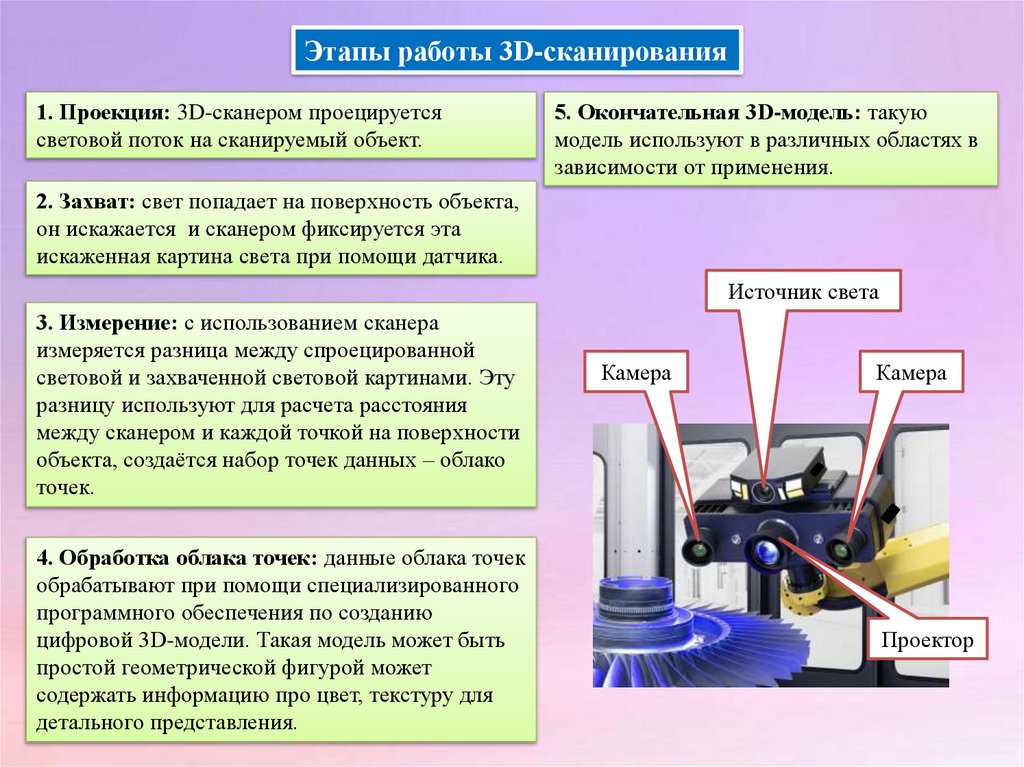
Этапы работы 3D-сканирования1. Проекция: 3D-сканером проецируется
световой поток на сканируемый объект.
5. Окончательная 3D-модель: такую
модель используют в различных областях в
зависимости от применения.
2. Захват: свет попадает на поверхность объекта,
он искажается и сканером фиксируется эта
искаженная картина света при помощи датчика.
Источник света
3. Измерение: с использованием сканера
измеряется разница между спроецированной
световой и захваченной световой картинами. Эту
разницу используют для расчета расстояния
между сканером и каждой точкой на поверхности
объекта, создаётся набор точек данных – облако
точек.
4. Обработка облака точек: данные облака точек
обрабатывают при помощи специализированного
программного обеспечения по созданию
цифровой 3D-модели. Такая модель может быть
простой геометрической фигурой может
содержать информацию про цвет, текстуру для
детального представления.
Камера
Камера
Проектор
16.
Типы 3D-сканеровЛазерный 3D-сканер – этим сканером
используется лазерный луч для
сканирования предмета, определяется его
форма и размер. Лазерный 3D-сканер
обеспечивает высокую точность и может
сканировать большой объект.
Фотограмметрический 3D-сканер – этим
сканером используются фотографии
предмета, которые сделаны с разных точек
зрения, чтобы создать 3D-модель. Он
неточный, чем другой тип сканера, но он
доступен и лёгкий в использовании.
Структурированный световой 3D-сканер
– этим сканером используется проекция
световых паттернов на предмет, затем
анализируется как эти паттерны
деформируются, для определения формы
детали. Структурированный световой 3Dсканер быстрее, чем лазерный сканеры,
имеют проблемы по сканированию объекта
со сложной текстурой и отражающей
поверхностью
Сканер на основе ультразвука –
использует ультразвук для создания 3Dизображения в медицинских и
промышленных приложениях. Он менее
точный для детализированного объекта, но
он может быть полезным для сканирования
мягкой ткани в медицинском приложении.
Сканер компьютерной томография – этот
сканер использует рентгеновские лучи,
чтобы создать детализированное 3Dизображение внутренней структуры
объекта. Он используется в медицине и
научном исследовании.
17.
Классификация по типу использования 3D-сканеровРучной 3D-сканер – этот сканер легкий и
портативный, это позволит пользователю
легко перемещаться вокруг объекта для
сканирования. Он подходят для сканирования
небольшого объекта и может быть
использован в различных областях: в
производстве искусстве и здравоохранении.
Беспилотный 3D-сканер (дрон) – этот
сканер устанавливают на беспилотный
летательный аппарат (дрон), чтобы
сканировать большие или труднодоступные
объекты. Он используется для сканирования
здания, моста, памятника и др. больших
структур.
Стационарный 3D-сканер – такой сканер
большой и мощный, чем ручной сканер. Он
подходит для сканирования большого
объекта: автомобиля, здания; используют в
промышленности и строительстве.
Мобильный 3D-сканер – такой сканер
устанавливают на мобильную платформу:
автомобиль или робота, Чтобы сканировать
большие пространства и сложную среду;
используется в геодезии и строительстве.
Ручной
3D-сканер
Беспилотный
3D-сканер
Стационарный
3D-сканер
Мобильный
3D-сканер