




")
")
")
































 physics
physicsSimilar presentations:










Теория автоматического управления
1.
Теория автоматическогоуправления
К.э.н., доцент Чубарова О.И.
2.
23. Теория автоматического управления
Теория автоматического управления (ТАУ) – частькибернетики, изучающая автоматическое управление
техническими объектами.
Наука, которая изучает процессы управления и основы
проектирования автоматических систем с обратными
связями
4.
Лекция 1. Основные определения, понятия икатегории автоматического управления
5. 1.1 История автоматического управления
Описание многих интересных автоматов оставил нам смотритель библиотекизнаменитого Александрийского маяка Герон Александрийский (Ἥρων ὁ Ἀλεξανδρεύς)
в книге «Пневматика», написанной в I в. н. э.
В ней показаны известные автоматы Древнего Египта, начиная со II в. до н. э., в том
числе для продажи воды или вина, открывания дверей храма при зажигания
священного огня на алтаре
Автомат для продажи святой воды. Вода
из резервуара 1 отпускается при открытии
клапана 2 рычагом 3, на который
опускается монета 4.
Автомат для открывания дверей храма
5
6. 1.1 История автоматического управления
Голландский механик и химик К. Дреббель (1572…1633 г.)изобрёл регулятор температуры, который использовал в своих
химических опытах и в инкубаторах для выведения цыплят.
Внутри камеры инкубатора 1, нагреваемой, например,
спиртовкой 2, размещен чувствительный элемент — сосуд со
спиртом 3, соединенный с U-образной трубкой 4, заполненной
ртутью и закрытой поршнем 5, воздействующим на рычаг
клапана 6 вентиляционного отверстия. Таким образом, перегрев
камеры приводит к расширению спирта и открытию
вентиляции.
Корнелиус Якобсон
Дреббель 1552-1633
Начиная с XVII в., в связи с развитием техники, в
Европе появляются новые регуляторы с обратной
связью:
регулятор температуры Дреббеля;
регулятор давления Папена;
регуляторы ветряных и водяных мельниц.
6
7. 1.1 История автоматического управления
Развитие промышленных регуляторов началось лишь на рубежеXVIII и XIX столетий. Первыми промышленными регуляторами
этого периода являются автоматический поплавковый регулятор
питания котла паровой машины, использованный в 1765 году И.И.
Ползуновым, и центробежный регулятор скорости паровой машины,
на который в 1784 году получил патент Дж. Уатт. Тем самым был
открыт фундаментальный принцип управления – принцип
обратной связи (принцип Ползунова-Уатта).
Ползунов И.И. Русский изобретатель 1728-1766
Джеймс Уатт
Шотландский
инженер,
изобретательмеханик 1736-1819
Первые публикации по исследованию
регуляторов появляются в двадцатых –
тридцатых годах XIX века.
В 1830 г. Жан Виктор Понселе предложил
построить регулятор, действие которого
было
направлено
на
компенсацию
изменения нормального функционирования
системы от возмущения. Принцип Понселе
Жан-Викто́р Понселе́ (принцип компенсации возмущающего
воздействия)
–
второй
Французский
математик, инженер фундаментальный принцип управления.
1788-1867
7
8. Регулятор уровня И.И.Ползунова (1765 г.)
GПGВ
H
`
9. Регулятор скорости паровой машины Д.Уатта (1784 г.)
GП10. Регулятор скорости паровой машины Д.Уатта (1784 г.)
11. 1.1 История автоматического управления
В 1868 г. английский физик Джеймс Клерк Максвелл в работе “О регуляторах”впервые поставил и рассмотрел математическую задачу об устойчивости систем
регулирования, где рассмотрены переход к исследованию малых отклонений и
линеаризации дифференциальных уравнений, формулировка условий устойчивости
линейных систем третьего порядка и постановка перед математиками задачи о
нахождении условий устойчивости для уравнений произвольного порядка.
В 1876 г. в трудах Парижской академии И.А. Вышнеградский
опубликовал статьи “Об общей теории регуляторов” и “О
регуляторах прямого действия”. В этих работах делался
существенный шаг вперёд при рассмотрении основных
показателей качества процесса регулирования: монотонность,
колебательность, апериодичность.
Иван Алексеевич Вышнеградский, основоположник теории автоматического управления, 1831-1895
В 1892 г. вышла работа знаменитого русского учёного Александра
Михайлович Ляпунова ”Общая задача об устойчивости движения”.
Важное место в теории регулирования занимают работы Николая Егоровича
Жуковского «О прочности хода» и «Теория регулирования хода машин» (1909 г.) и
работы словацкого учёного Ауреля Болеслава Стодолы по регулированию
11
гидротурбин.
12. 1.1 История автоматического управления
В 1932 г.американский учёный Харри Найквист
предложил критерий устойчивости по частотным
характеристикам системы в разомкнутом состоянии, а в
1936 г. А.В. Михайлов показывает преимущества
применения частотных методов, предложив свой критерий
устойчивости, не требующий предварительного размыкания
цепи.
Гарри Найквист 1889-1976
В 1940-1950 годы сформировалась новая современная теория автоматического
управления. В области устойчивости разработаны методы, существенно
облегчающие применение различных критериев устойчивости, введены различные
количественные оценки показателей качества процессов регулирования (время
регулирования,
перерегулирование,
колебательность,
выброс,
степень
устойчивости).
В настоящее время ТАУ представляет собой единую научную базу для решения
задач управления объектами различной природы (физической, химической,
биологической и т.п.), имея хорошо развитые методы исследования САУ – анализа и
синтеза (расчёта и проектирования).
12
13. Основные понятия и определения
Объект управления – техническое устройство илипроцесс, поведение которого нас не устраивает по
каким-либо причинам.
Управление – процесс воздействия на объект
управления.
Регулирование – частный случай управления,
целью которого является приведение объекта к
заданному состоянию.
Автоматический процесс – процесс, который
совершается без участия человека.
14. Основные понятия и определения
Система–
совокупность
элементов,
объединенных
общим
режимом
функционирования
(элементом
можно
называть любое техническое устройство).
Динамическая система – система, процессы в
которой изменяются с течением времени в силу
собственных свойств.
Система автоматического управления (САУ) –
динамическая система, которая работает без
участия человека.
15. 1. Основные понятия автоматического управления 1.2. Основные термины и определения
Автоматическое управление- осуществление некоторых
операций/действий управления без участия человека, выбранных из
множества возможных на основании определенной информации о
функционировании ОУ и направленных на поддержание или улучшение
его работы.
Система автоматического управления (САУ) - система,
представляющая совокупность ОУ и УУ, взаимодействие которых
между собой обеспечивает процесс управления без участия человека.
Для САУ входными величинами являются:
возмущающие воздействия;
цель управления.
Автоматическое
регулирование -поддержание регулируемой
величины на заданном постоянном уровне или изменение ее значения
по заданному закону (основная цель регулирования) без
непосредственного участия человека.
15
16. 1. Основные понятия автоматического управления 1.2. Основные термины и определения
Система автоматического регулирования (САР) - система,представляющая совокупность ОУ и УУ (называемых в этом случае
ОР и регулятором), взаимодействие которых между собой
обеспечивает процесс управления без участия человека.
Для САР входными величинами являются:
возмущающие воздействия;
задающее воздействие.
Автоматизированная система управления (АСУ) – это человекомашинная система, обеспечивающая автоматизированный сбор и
обработку информации, необходимой для управления в различных
сферах человеческой деятельности.
16
17. 1. Основные понятия автоматического управления 1.2. Основные термины и определения
В задачах управления всегда есть два объекта – управляемый иуправляющий. Управляемый объект обычно называют объектом
управления или просто объектом, а управляющий объект –
регулятором.
Например, при управлении
частотой вращения объект
управления – это двигатель
(электромотор, турбина); в
задаче стабилизации курса
корабля
–
корабль,
погруженный в воду; в задаче
поддержания
уровня
громкости – динамик.
Управляющее устройство (УУ) или регулятор (Р) – это техническое
устройство, с помощью которого осуществляется автоматическое
управление объектом.
17
18. 1. Основные понятия автоматического управления 1.2. Основные термины и определения
Управление – это процесс формирования и реализацииуправляющих воздействий, направленных на достижение
объектом управления некоторой цели.
Состояние ОУ характеризуется параметрами состояния
(переменными состояния), образующими вектор состояния
ОУ:
X(τ) = {x1(τ), …, xn(τ)}
Состояние ОУ изменяется под действием управляющих и
возмущающих воздействий.
18
19. 1. Основные понятия автоматического управления 1.2. Основные термины и определения
Возмущающие воздействия – это воздействия на ОУ внешнейсреды, которые способны вывести ОУ из желаемого состояния:
f(τ) = {f1(τ), …, fl(τ)}
Возмущающее воздействие
Управляющие воздействия – это совокупность воздействий на
ОУ, направленных на достижение поставленных целей
управления.
Управляющее воздействие
v(τ) = {v1(τ), …, vm(τ)}
Состояние детерминированного ОУ в любой момент времени является
функцией начального состояния ОУ и входных воздействий
(управляющих и возмущающих):
Выходной сигнал
Y(τ) = f{X(τ0), v(τ), f(τ)}
19
20. Функциональная схема объекта управления
f1u1
…
um
…
x1
…
xn
u1, …, um – управляющие
воздействия;
fl
y1
…
yp
y1, …, yp – выходные
переменные;
x1, …, xn – переменные
состояния;
f1, …, fl – возмущающие
воздействия.
21. Лекция 2 Принципы и типовые законы автоматического регулирования
2122. 2. Принципы регулирования
1.2.
3.
4.
Управление
по
задающего
.
воздействию.
Управление
по
внешнему
возмущающему воздействию.
Управление по отклонению.
Комбинированное управление.
1. Управление по задающему
воздействию
По такому принципу работают станки с
числовым программным управлением
для получения ткани с вышитым
рисунком, светофоры на перекрестках.
Разомкнутая система управления
узд
- значение управляемого
параметра
(заданное
значение),
соответствующее
желаемому
в
данный момент состоянию ОУ.
Достоинство
–
простота
конструктивной реализации.
Недостаток – качественное
управление возможно, если ОУ
хорошо изучен и возмущающие
воздействия
остаются
постоянными.
d
yзд
УУ
v
y
ОУ
Используется информация
только о цели управления
22
23. 1. Основные понятия автоматического управления 1.4 Принципы управления
2.Управление
по
внешнему
возмущающему воздействию
d
yзд
УУ
v
y
ОУ
Используется информация о
цели управления и
возмущающих воздействиях.
Задача УУ в выработке управляющего воздействия, которое бы компенсировало
внешнее возмущающее воздействие на ОУ.
Компаундирование
(введение
Генераторы с дополнительной обмоткой
возбуждения в цепи якоря, в которой создается
дополнительный
магнитный
поток
для
компенсации потери напряжения, который
пропорционален силе тока нагрузке генератора.
дополнительных
обмоток
возбуждения) электрических машин
представляет собой пример САУ по
возмущению.
Характерные черты управления по внешнему возмущающему воздействию
1. Разомкнутое управление, т.е. управление без обратной связи, что означает
отсутствие информации об управляемом параметре.
2. Необходимо точно выбрать канал, по которому может проявиться главное
возмущающее воздействие.
23
3. Невозможно использовать в СУ нейтральными и неустойчивыми ОУ.
24. 1. Основные понятия автоматического управления 1.4 Принципы управления
2.Управление
по
внешнему
возмущающему воздействию
Достоинства данного принципа управления:
Быстродействие, т.к. возмущающее воздействие может быть
скомпенсировано до появления рассогласования между текущим
значением регулируемого параметра и его заданным значением.
2.
2. Возможность (теоретическая) полной компенсации выбранного
возмущающего воздействия.
3.
Отсутствие проблем, связанных с устойчивостью СУ и ОУ.
Недостатки данного принципа управления:
1. Учитываются не все возмущающие воздействия и поэтому снижается
точность управления, особенно при наличии неконтролируемых
возмущающих воздействий.
1.
2. Не контролируется результат управляющего воздействия.
3. Необходима надежная информация о функциональной взаимосвязи
возмущающим воздействием и регулируемой величиной (выходным
параметром).
24
25. 1. Основные понятия автоматического управления 1.3 Принципы управления
3. Управление по отклонениюd
yзд
УУ
v
y
ОУ
Управление по отклонению осуществляется:
по цепи прямой связи – от УУ к ОУ;
по цепи обратной связи – от ОУ к УУ.
Используется информация о
цели управления и отклонении
текущего значения
управляемого параметра от
заданного значения.
Информация передается по замкнутому контуру (контуру регулирования),
поэтому этот принцип называется принципом замкнутого управления или
управления с обратной связью.
25
26. 1. Основные понятия автоматического управления 1.3 Принципы управления
.3. Управление по отклонению
Возмущающие воздействия вызывают отклонения между заданным и
действительным значением управляемой (регулируемой) величины.
Разность между ними называют ошибкой регулирования (погрешностью
регулирования):
ε(τ) = yзд(τ) - y(τ).
yзд(τ)
ε(τ)
v(τ)
d(τ)
y(τ)
УУ
ОУ
Обратная связь в
замкнутой СУ должна
быть отрицательной
Управление по отклонению является «гибким», т.к. стремится устранить
отклонение независимо от причин его вызвавших.
По такому принципу работают большинство САУ для регулирования
температуры, давления, частоты вращения двигателей.
26
27. 1. Основные понятия автоматического управления 1.4 Принципы управления
3. Управление по отклонениюДостоинства данного принципа управления:
1. Учитываются все возмущающие воздействия, оказывающие влияние на
управляемый параметр (регулируемую величину).
2. Требуется ограниченная информация о процессе, протекающем в ОУ.
Недостатки данного принципа управления:
1. Управление по отклонению требует определенной настройки (метод
проб и ошибок).
2. Присутствует запаздывание, т.к. учитываются все возмущающие
воздействия, что приводит к снижению быстродействия управления.
3. При определенных сочетаниях характеристик ОУ и УУ система
управления с обратной связью может быть неустойчивой.
27
28. 1. Основные понятия автоматического управления 1.4 Принципы управления
Используется информация оцели управления,
возмущающем воздействии и
отклонении текущего значения
управляемого параметра от
заданного значения.
4. Комбинированное управление
d
yзд
УУ
v
ОУ
y
Комбинированные СУ имеют более высокое качество управления, чем все
остальные СУ, т.к. комплексно учитывает достаточно большое количество
факторов, влияющих на ОУ.
Комбинированные СУ характеризуются точностью и быстродействием.
Такие САУ имеют два контура управления. В первом контуре (по возмущению)
производится быстрое предварительное регулирование, а во втором контуре (по
отклонению) производится медленная и точная регулировка. По такому принципу
происходит регулирование, например, давление пара в паровом котле. Пропорционально
расходу пара производится регулирование по возмущению (по нагрузке), а по
отклонению давления пара от заданного производится более точное регулирование. 28
29. 1. Основы теории автоматического управления
1.6 Типовые законы автоматического регулированияЗакон автоматического регулирования – это уравнение регулятора, выражающее
управляющее воздействие (выходную величину регулятора) через рассогласование
и возмущение (его входные величины).
1. Пропорциональный закон (П – регулятор)
где kp - коэффициент передачи регулятора, ε - ошибка регулирования.
u k p
П – регулятор. В связи с наличием жесткой взаимосвязи между изменениями
входной и выходной величин П - регулятор имеет высокое быстродействие и малую
продолжительность переходного процесса.
П - регулятор в стационарных режимах работы объекта обладает статической
ошибкой.
С точки зрения точности регулирования, статическая ошибка является недостатком П
- закона регулирования, однако это свойство повышает устойчивость САУ, что
является положительным моментом.
29
30. 1. Основы теории автоматического управления
1.6 Типовые законы автоматического регулирования2. Пропорционально – дифференциальный закон (ПД – регулятор)
d
u k p TД
dt
где ТД - постоянная времени дифференцирования.
d
Благодаря наличию
dt данный регулятор при росте или убывании ε оказывает на
ОР большее влияние по сравнению с П – регулятором при прочих равных
условиях.
Регулятор как бы предваряет дальнейшее изменение регулируемой величины и
благодаря этому устраняет ε более быстро и плавно.
ПД – регулятор. Оказывает воздействие на объект регулирования
пропорционально отклонению регулируемой величины и производной от величины
отклонения, т. е. ее скорости изменения.
Применяется на объектах, где регулируемая величина имеет свойство быстро
отклоняться от заданного значения и необходима реакция на скорость ее отклонения.
30
31. Основы теории автоматического управления
1.6 Типовые законы автоматического регулирования3. Интегральный закон (И – регулятор):
u k p dt
Все регуляторы, содержащие в законе
регулирования
интеграл,
обеспечивают
астатическое регулирование, т.е.
ε = 0 в статическом режиме.
И – регулятор. Основное назначение И-регулирования - ликвидация
установившейся ошибки регулирования.
В качестве самостоятельных И - регуляторы применяются редко из-за медленного
нарастания регулирующего воздействия на объект при отклонении регулируемой
величины.
Очень часто закон И - регулирования формируется не самостоятельным регуляторам,
а блоком или устройством, конструктивно являющимся составной частью
регулятора, реализующего более сложный, например, пропорционально интегральный закон регулирования.
31
32. Основы теории автоматического управления
1.6 Типовые законы автоматического регулирования4. Пропорционально – интегральный закон (ПИ – регулятор)
1
u k p dt
Tи
,
Типовая инженерная задача расчета и
проектирования САР сводится к выбору
закона регулирования и расчету параметров
настройки регулятора kp, ТД , Ти.
где Ти - постоянная времени интегрирования.
5. Пропорционально – интегральный – дифференциальный закон (ПИД –
регулятор)
1
d
u k p dt TД
Tи
dt
ПИ – регулятор. В замкнутом контуре при отклонении регулируемого параметра
от заданного значения пропорциональная составляющая ПИ-регулятора уменьшает
скорость этого отклонения, а затем интегральная составляющая продолжает
воздействовать на объект до ликвидации рассогласования .
В ПИ-регуляторе при отклонении регулируемой величины от заданного значения, в
начале срабатывает пропорциональная (статическая) часть регулятора, а затем
воздействие на объект постепенно увеличивается под действием интегральной
(астатической) части регулятора.
32
33.
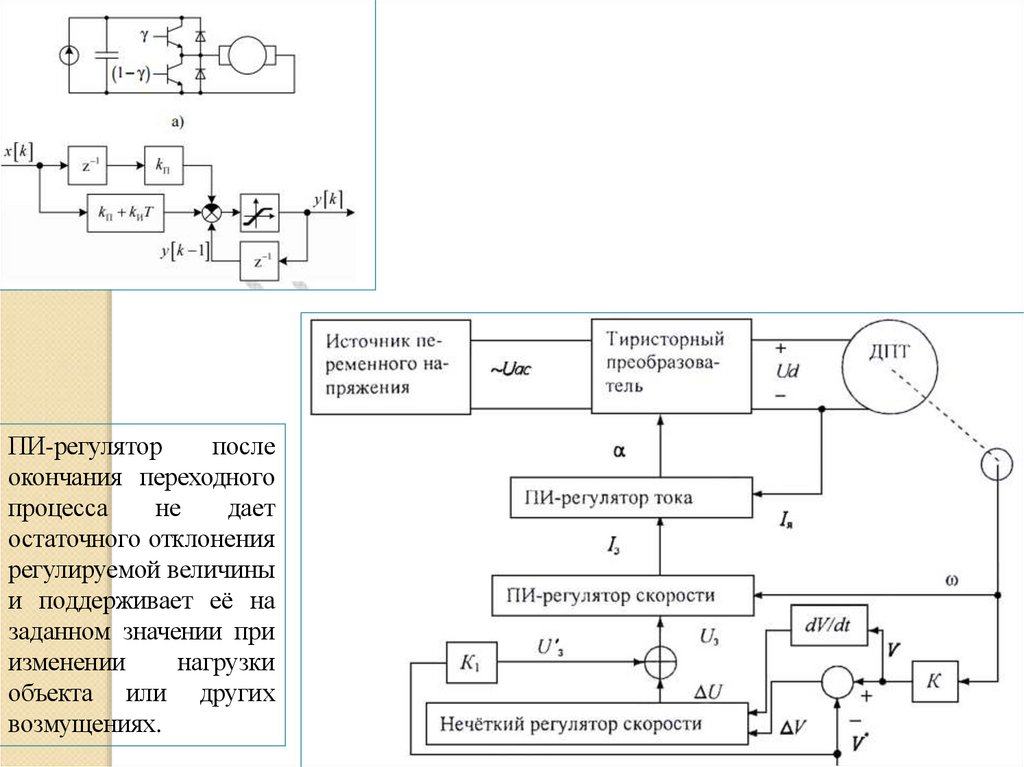
ПИ-регуляторпосле
окончания переходного
процесса
не
дает
остаточного отклонения
регулируемой величины
и поддерживает её на
заданном значении при
изменении
нагрузки
объекта или других
возмущениях.
33
34. Лекция 3 Классификация САУ
3435. 1. Основные понятия автоматического управления
1.5 Классификация систем управления1. По характеру изменения
задающего воздействия во
времени
Системы
стабилизации, если
входное воздействие –
постоянная величина
Системы
автоматической
стабилизации
применяются
для
управления
ТП
машиностроения,
в
которых
управляемый
параметр
необходимо
поддерживать на заданном
уровне.
системы
Программного
регулирования, если
входное воздействие –
известная функция
времени
Системы программного
регулирования оснащены
программными
задатчиками,
формирующими задающее
воздействие,
изменяющееся во времени
и
применяются
для
периодических
ТП
машиностроения.
Следящие системы,
если входное
воздействие –
случайная величина
Следящие
системы
применяются, если задающее
воздействие представляет собой
неизвестную
во
времени
функцию, связанную с внешним
по отношению к СУ параметром,
который
носит
случайный
характер.
Следящая
система,
воспроизводит
задающее
воздействие. Например, антенна
радиолокатора поворачивается
следуя за самолетом, траектория
движения
которого
заранее
неизвестна, т. е. «следит» за ним.35
36. 1. Основные понятия автоматического управления
1.5 Классификация систем управления2. По способу организации
Циклические
Непрерывные
Периодические
Непрерывные
ТП
должны
быть
стационарными, т.е. параметры процесса в
каждой
точке
технологического
пространства должны быть постоянными во
времени,
но
могут
изменяться
в
пространстве технологических параметров.
Основной задачей СУ непрерывных ТП
является стабилизация технологических
параметров.
Циклические
ТП
характеризуются периодически
изменяющимися
технологическими параметрами.
Периодические ТП характеризуются изменением
во времени параметров в технологическом
пространстве, т.е. эти процессы являются
нестационарными.
Основной задачей СУ периодических ТП является
изменение
технологических
параметров
в
соответствии с заранее заданной программой
(программные СУ) или в зависимости от текущего
состояния
какого-либо
другого
процесса
(следящие СУ).
36
37. 1. Основные понятия автоматического управления
1.5 Классификация систем управления3. По числу контуров САР
Одноконтурные
Многоконтурные
Одноконтурные системы управления – это
замкнутые СУ с одной регулируемой
величиной и имеющие одну главную
обратную связь – один контур управления.
Многоконтурные системы управления – это
замкнутые СУ имеющие несколько обратных
связей, включая главные обратные связи и
местные обратные связи, т.е. несколько
контуров управления.
37
38. 1. Основные понятия автоматического управления
1. Основные понятия автоматического управленияСистему регулирования1.5 Классификация систем управления
Процессы регулирования трех
регулируемых величин — курса,
поперечного
крена
и
продольного
крена,
нельзя
считать независимыми друг от
друга, несмотря на наличие
самостоятельных
каналов
управления
(несвязанная
зависимая)
Одномерные
имеют
управляемую
величину,
многомерные
несколько
СУ
одну
числа оборотов
гидротурбины и система
регулирования напряжения
вращаемого ею синхронного
генератора (несвязанная
независимая)
4. По числу управляемых
величин
Одномерные
Несвязанные СУ используют одноконтурные САР,
не связанные между собой. Объединяет эти
системы только общий для них объект
управления.
В зависимых несвязанных СУ управление
различными управляемыми параметрами нельзя
рассматривать независимо друг от друга, т.к.
присутствует их взаимное влияние друг на друга.
Многомерные
Несвязанные
Зависимые
Связанные
Независимые
В независимых несвязанных СУ управление
различными управляемыми параметрами
можно рассматривать независимо друг от
друга.
38
39. 1. Основные понятия автоматического управления
1.5 Классификация систем управленияНепрерывные
СУ
характеризуются
формированием
и
реализацией
непрерывного
управляющего
воздействия
в
зависимости
от
изменения
задающего
воздействия
и
управляемой
величины.
5. По характеру
управляющих
воздействий
Непрерывные
Дискретные СУ характеризуются
формированием и реализацией
управляющего
воздействия,
которое может принимать одно из
нескольких возможных значений.
Для данных систем характерно то,
что
через
определенные
промежутки времени происходит
размыкание и замыкание цепи
воздействия.
Импульсные
Дискретные
Релейные
Импульсные СУ – это СУ, в которых размыкание цепи
воздействия происходит принудительно и периодически
специальным прерывающим устройством. Данные СУ
содержат
специальные
элементы,
способные
преобразовывать
непрерывное
изменение
входной
величины в дискретную импульсную выходную величину.
Релейные СУ – это СУ, в размыкание и замыкание цепи
воздействия выполняется одним из элементов системы при
непрерывном значении входного воздействия. Данные
системы содержат элементы с релейной характеристикой,
которая принимает только два значения: минимально и
39
максимально возможное.
40. 1. Основные понятия автоматического управления
1.5 Классификация систем управления6. По виду зависимости
установившейся ошибки
от внешнего воздействия
Статические
СУ называют статической по отношению к
внешнему
воздействию,
если
при
воздействии стремящемуся со временем к
некоторому установившемуся значению,
ошибка тоже стремится к постоянному
значению,
зависящему
от
величины
внешнего воздействия.
При наличии возмущающих воздействий
статические
СУ
не
могут
точно
стабилизировать управляемый параметр.
Астатические
СУ называют астатической по отношению к
внешнему воздействию, если при воздействии
стремящемуся со временем к некоторому
установившемуся значению, ошибка стремится к
нулю, независимо от величины внешнего
воздействия.
Одна и та же СУ может быть статической по
возмущающему воздействию и астатической по
управляющему.
40
41. 1. Основные понятия автоматического управления
1.5 Классификация систем управления7. По энергетическим
признакам
Прямого
управления
Непрямого
(косвенного)
управления
СУ непрямого (косвенного) управления –
это системы, в которых для перемещения
РО
применяются
вспомогательные
устройства, работающие от посторонних
(внешних) источников энергии.
СУ прямого управления – это системы, в
которых
первичный
измерительный
преобразователь
воздействует
непосредственно
на
изменение
положения регулирующего органа (РО).
41
42. 1. Основные понятия автоматического управления
1.5 Классификация систем управленияЛинейные СУ – это СУ,
функционирование которых
описывается
линейными
дифференциальными
или
разностными уравнениями.
7. По математическому
описанию
Линейные
Нелинейные СУ - это СУ,
функционирование
которых
описывается
нелинейными
дифференциальными
или
разностными уравнениями.
Нелинейные
Линейные и нелинейные СУ в свою очередь делятся на три следующих класса: непрерывные,
дискретные и непрерывно-дискретные.
Непрерывные СУ описываются дифференциальными уравнениями, дискретные СУ –
дифференциально-разностными, непрерывно-дискретные СУ – обоими видами уравнений.
В свою очередь каждый из трех классов подразделяется на подклассы:
стационарные системы с сосредоточенными параметрами;
стационарные системы с распределенными параметрами;
нестационарные системы с сосредоточенными параметрами;
нестационарные системы с распределенными параметрами.
Кроме того, системы подразделяют на детерминированные и стохастические.
Детерминированные СУ – это СУ, в которых параметры СУ и воздействия на нее описываются
известными функциями.
Стохастические СУ – это СУ, в которых параметры СУ и воздействия на нее являются
42
случайными величинами или описываются случайными функциями.
43. 1.5 Классификация систем управления
Дифференциальное уравнение является линейным, если неизвестная функция и еёпроизводные входят в уравнение только в первой степени (и не перемножаются друг с
другом).
Если объект характеризуется некоторым параметром, различным по своему значению в
разных точках объекта, то можно сказать, что значения такого параметра распределены по
объекту. Если таких параметров несколько, то объект рассматривается как система с
распределенными параметрами. К параметрам же относятся давление, температура, вязкость,
трение.
Пример. Реактор, на технологической установке ЛЧ-24-7. Температура измеряется в
нескольких контрольных точках.
Нестационарными линейными системами или линейными системами с переменными
параметрами
называют
системы,
которые
описываются
линейными
дифференциальными уравнениями с переменными коэффициентами.
САУ (линейные, нелинейные,
непрерывные,
дискретные)
называются
стационарными, если их
динамические
режимы
описываются уравнениями с
постоянными
43
коэффициентами