






 mechanics
mechanicsSimilar presentations:










Лекция 21-22 (Т6.2) 2023-24 Вертолет. Динамика
1. 6.14. Вертолет как объект управления, компоновочная схема вертолета
Тема 6.2. Пилотажно-навигационные комплексы вертолетовЛекция №21 Динамика движения вертолета.
6.14. Вертолет как объект управления, компоновочная схема вертолета
Вертолет — летательный аппарат (ЛА) тяжелее воздуха, использующий для
полета аэродинамическую подъемную силу, которая создается одним или
несколькими несущими винтами, приводимыми во вращение силовой
установкой.
Решаемые задачи
- выполняет взлет по вертикали или наклонной траектории без
предварительного разбега по земле;
- неподвижно висит над заданной точкой и разворачивается в
любую сторону на висении;
- перемещается в любом направлении — вперед, вбок, назад;
- вертикально снижается и выполняет посадку без пробега по
земле;
- планирует и осуществляет безопасную посадку с выключенными
двигателями на режиме самовращения несущего винта.
2.
Внешний облик вертолета определяется его аэродинамическойкомпоновкой, которая в свою очередь зависит главным образом
от числа и расположения несущих винтов, а также назначения
ЛА
По числу несущих винтов вертолеты классифицируют на
одно-, двух- и многовинтовые.
В основу классификации положен способ уравновешивания
реактивного момента, который возникает по третьему закону
Ньютона при передаче крутящего момента двигателей,
установленных в фюзеляже, на несущий винт и вращает корпус
вертолета в направлении, противоположном направлению
вращения несущего винта.
«Стабилизировать» полет вертолета возможно двумя
способами:
-использованием пары несущих винтов, вращающихся в
противоположные стороны и взаимно уравновешивающих
реактивные моменты (двух винтовые вертолеты)
3.
Ка-52 "Аллигатор"Boeing CH-47 Chinook.
СИНХРОПТЕР (Камова)
MV22B Osprey
4.
- установкой рулевого винта, тяга которого создает на плече доцентра масс вертолета момент, противодействующий
реактивному моменту несущего винта (одновинтовые
вертолеты).
МИ-28Н Ночной охотник
МИ-24
Ми-8,17, 171
Ми-26 и Чинук
5.
Характерныеособенности
управления одновинтовых вертолетов
При управлении вертолетом необходимо учитывать, что:
- вертолет, как правило, неустойчив в пространственном движении;
- одновинтовые вертолеты обладают существенной асимметрией
характеристик из-за наличия винта;
- угловые движения вертолета оказывают существенное влияние на
динамику работы несущего винта;
- характеристики устойчивости и управляемости вертолета сильно
изменяются при вариации режима полета, а нередко становятся
обратными по знаку;
- управление полетом вертолета в значительной степени зависит от
динамических свойств несущего винта.
6.
6.15. Силы и моменты, действующие на одновинтовой вертолет.Наибольшее распространение получили одновинтовые вертолеты с
рулевым винтом, основными элементами которых являются
- несущий винт НВ
хвостовой (рулевой) винт ХВ
фюзеляж с хвостовой балкой
Дополнительными
элементами
конструктивной
схемы
вертолета
являются: крыло, киль, стабилизатор .
7.
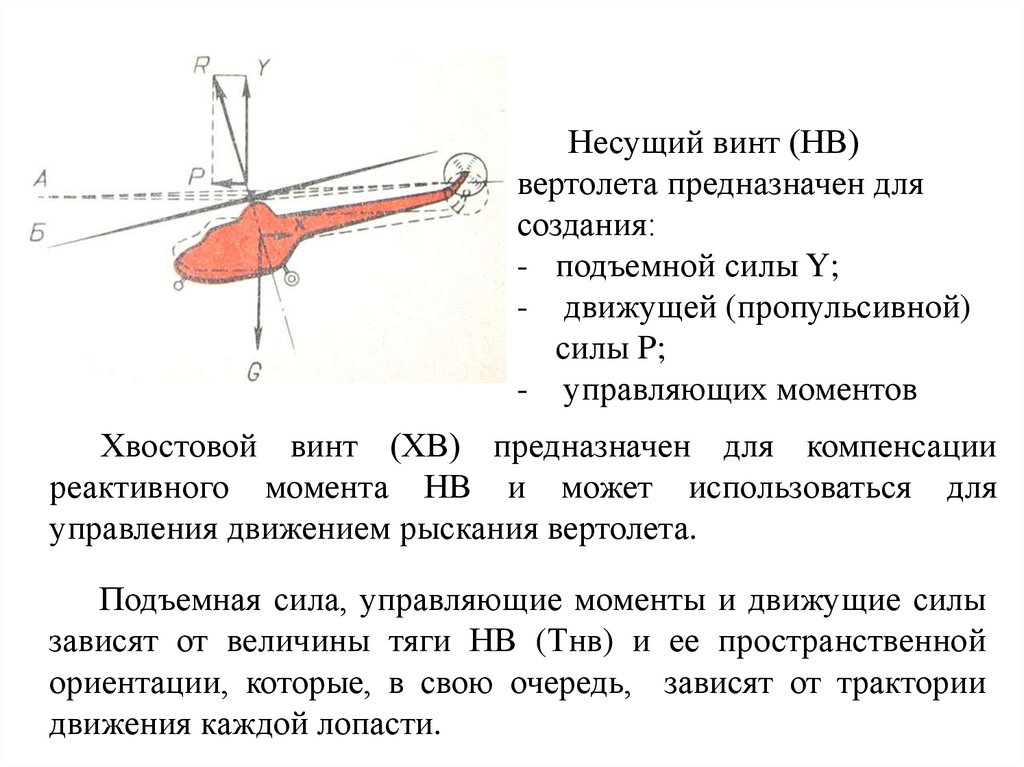
Несущий винт (НВ)вертолета предназначен для
создания:
- подъемной силы Y;
- движущей (пропульсивной)
силы P;
- управляющих моментов
Хвостовой винт (ХВ) предназначен для компенсации
реактивного момента НВ и может использоваться для
управления движением рыскания вертолета.
Подъемная сила, управляющие моменты и движущие силы
зависят от величины тяги НВ (Тнв) и ее пространственной
ориентации, которые, в свою очередь, зависят от трактории
движения каждой лопасти.
8.
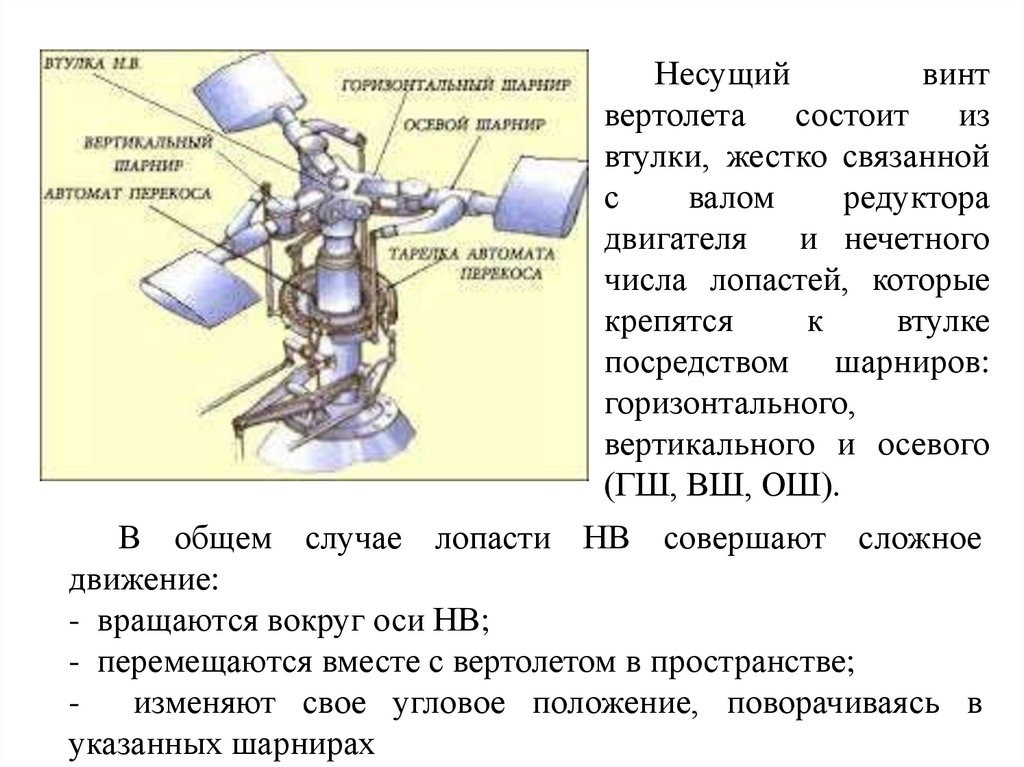
Несущийвинт
вертолета состоит из
втулки, жестко связанной
с
валом
редуктора
двигателя
и нечетного
числа лопастей, которые
крепятся
к
втулке
посредством шарниров:
горизонтального,
вертикального и осевого
(ГШ, ВШ, ОШ).
В общем случае лопасти НВ совершают сложное
движение:
- вращаются вокруг оси НВ;
- перемещаются вместе с вертолетом в пространстве;
изменяют свое угловое положение, поворачиваясь в
указанных шарнирах
9.
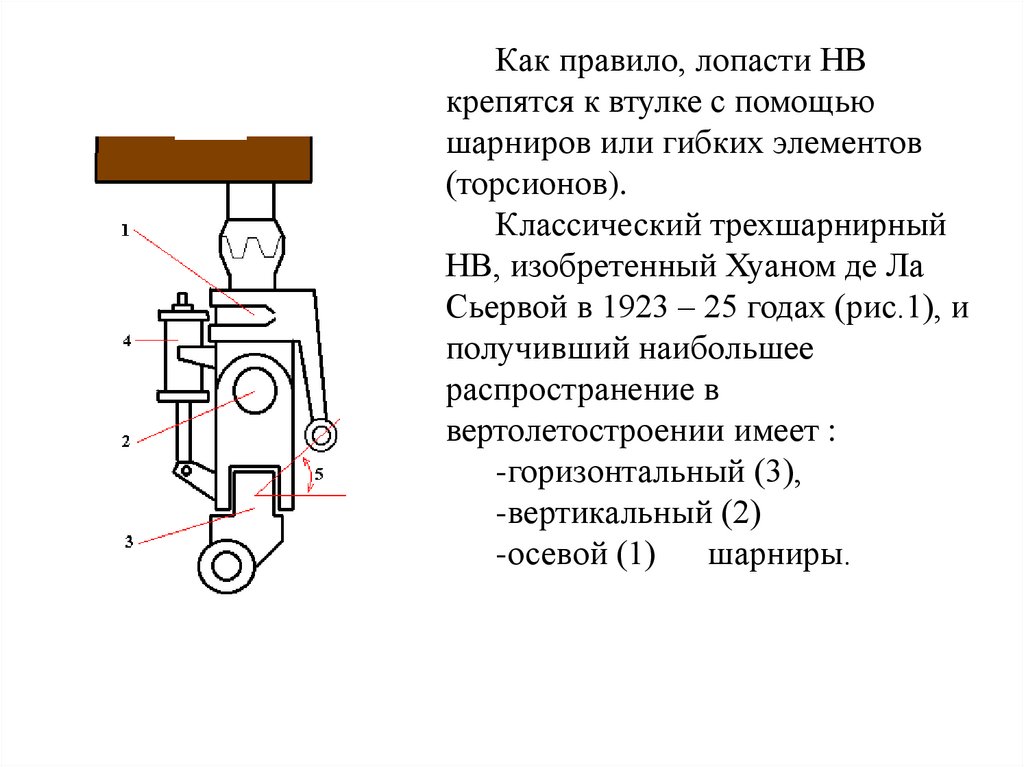
Как правило, лопасти НВкрепятся к втулке с помощью
шарниров или гибких элементов
(торсионов).
Классический трехшарнирный
НВ, изобретенный Хуаном де Ла
Сьервой в 1923 – 25 годах (рис.1), и
получивший наибольшее
распространение в
вертолетостроении имеет :
-горизонтальный (3),
-вертикальный (2)
-осевой (1)
шарниры.
10.
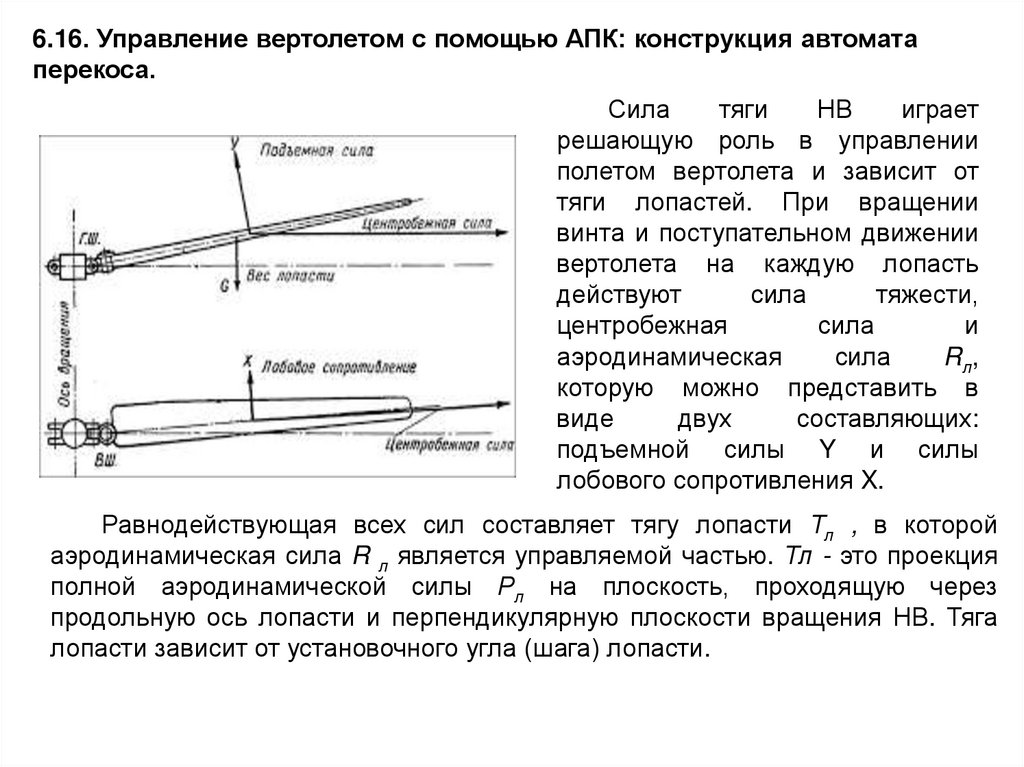
6.16. Управление вертолетом с помощью АПК: конструкция автоматаперекоса.
Сила
тяги
НВ
играет
решающую роль в управлении
полетом вертолета и зависит от
тяги лопастей. При вращении
винта и поступательном движении
вертолета на каждую лопасть
действуют
сила
тяжести,
центробежная
сила
и
аэродинамическая
сила
Rл,
которую можно представить в
виде
двух
составляющих:
подъемной силы Y и силы
лобового сопротивления X.
Равнодействующая всех сил составляет тягу лопасти Тл , в которой
аэродинамическая сила R л является управляемой частью. Тл - это проекция
полной аэродинамической силы Рл на плоскость, проходящую через
продольную ось лопасти и перпендикулярную плоскости вращения НВ. Тяга
лопасти зависит от установочного угла (шага) лопасти.
11.
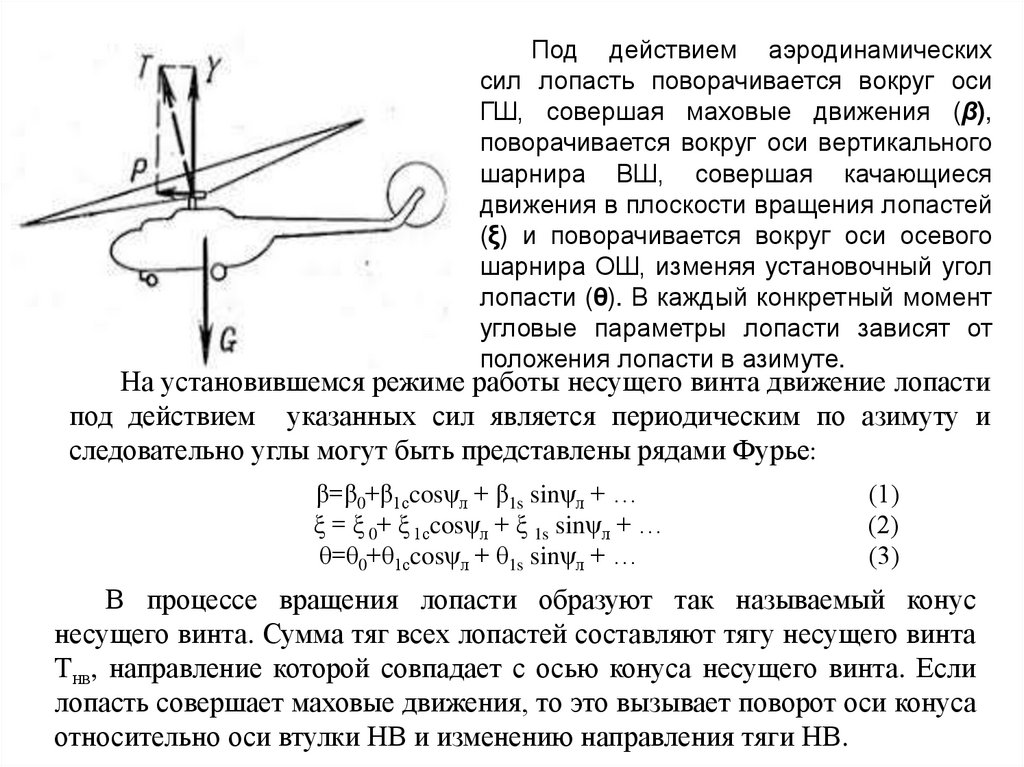
Под действием аэродинамическихсил лопасть поворачивается вокруг оси
ГШ, совершая маховые движения (β),
поворачивается вокруг оси вертикального
шарнира ВШ, совершая качающиеся
движения в плоскости вращения лопастей
(ξ) и поворачивается вокруг оси осевого
шарнира ОШ, изменяя установочный угол
лопасти (θ). В каждый конкретный момент
угловые параметры лопасти зависят от
положения лопасти в азимуте.
На установившемся режиме работы несущего винта движение лопасти
под действием указанных сил является периодическим по азимуту и
следовательно углы могут быть представлены рядами Фурье:
β=β0+β1сcosψл + β1s sinψл + …
ξ = ξ 0+ ξ 1сcosψл + ξ 1s sinψл + …
θ=θ0+θ1сcosψл + θ1s sinψл + …
(1)
(2)
(3)
В процессе вращения лопасти образуют так называемый конус
несущего винта. Сумма тяг всех лопастей составляют тягу несущего винта
Тнв, направление которой совпадает с осью конуса несущего винта. Если
лопасть совершает маховые движения, то это вызывает поворот оси конуса
относительно оси втулки НВ и изменению направления тяги НВ.
12.
Колебательные движения лопастей приводят к появляетсявибрации, ощущаемой экипажем в полете. Кроме того, эти
колебания носят незатухающий характер. Для уменьшения
вибрации и гашения колебаний применяются гасители
колебаний (демпферы), которые поглощают и рассеивают
энергию колебаний, превращая их в затухающие.
Управление движением вертолета связано с изменением
величины и направления тяги несущего винта.
Управление величиной тяги осуществляется путем
изменения
общего
шага
НВ,
а
управление
пространственным
положением
вектора
тяги
осуществляется
за
счет
циклического
изменения
установочных углов лопастей θ в зависимости от их
азимутального положения.
13.
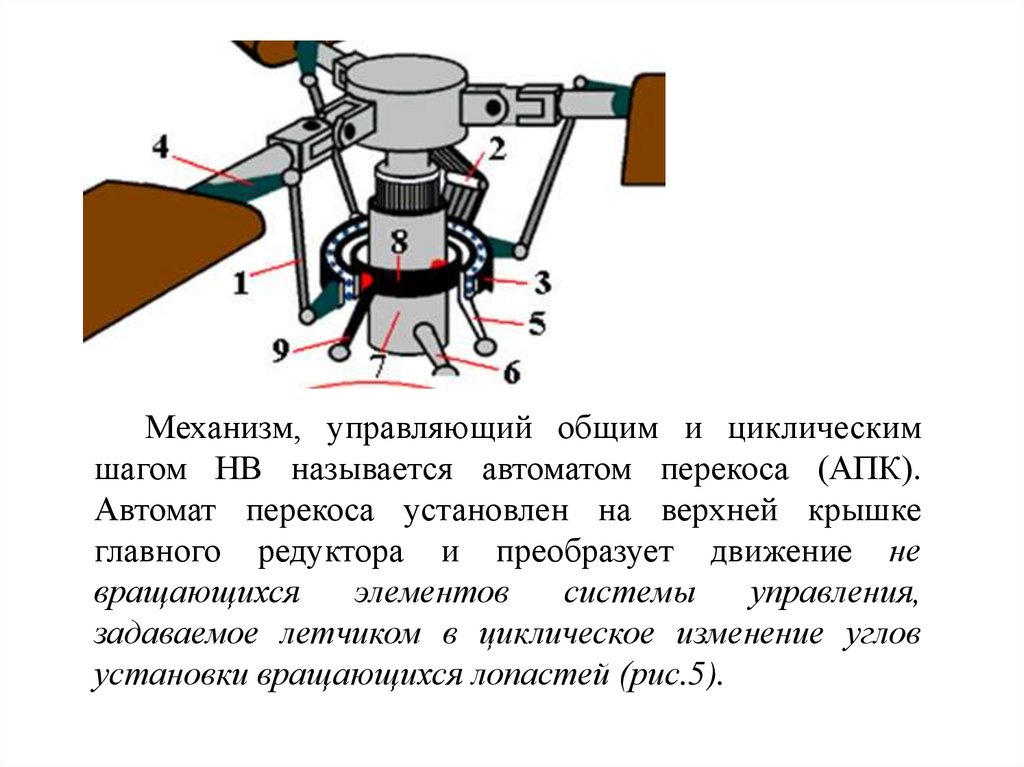
Механизм, управляющий общим и циклическимшагом НВ называется автоматом перекоса (АПК).
Автомат перекоса установлен на верхней крышке
главного редуктора и преобразует движение не
вращающихся
элементов
системы
управления,
задаваемое летчиком в циклическое изменение углов
установки вращающихся лопастей (рис.5).
14.
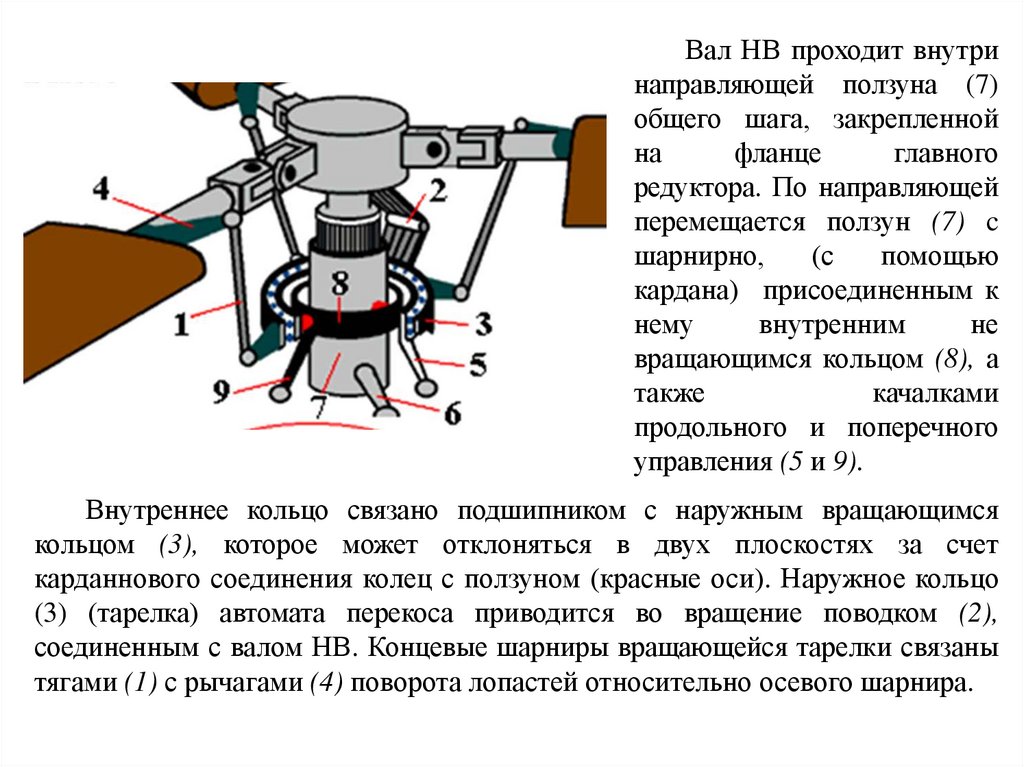
Вал НВ проходит внутринаправляющей ползуна (7)
общего шага, закрепленной
на
фланце
главного
редуктора. По направляющей
перемещается ползун (7) c
шарнирно,
(с
помощью
кардана) присоединенным к
нему
внутренним
не
вращающимся кольцом (8), а
также
качалками
продольного и поперечного
управления (5 и 9).
Внутреннее кольцо связано подшипником с наружным вращающимся
кольцом (3), которое может отклоняться в двух плоскостях за счет
карданнового соединения колец с ползуном (красные оси). Наружное кольцо
(3) (тарелка) автомата перекоса приводится во вращение поводком (2),
соединенным с валом НВ. Концевые шарниры вращающейся тарелки связаны
тягами (1) с рычагами (4) поворота лопастей относительно осевого шарнира.
15.
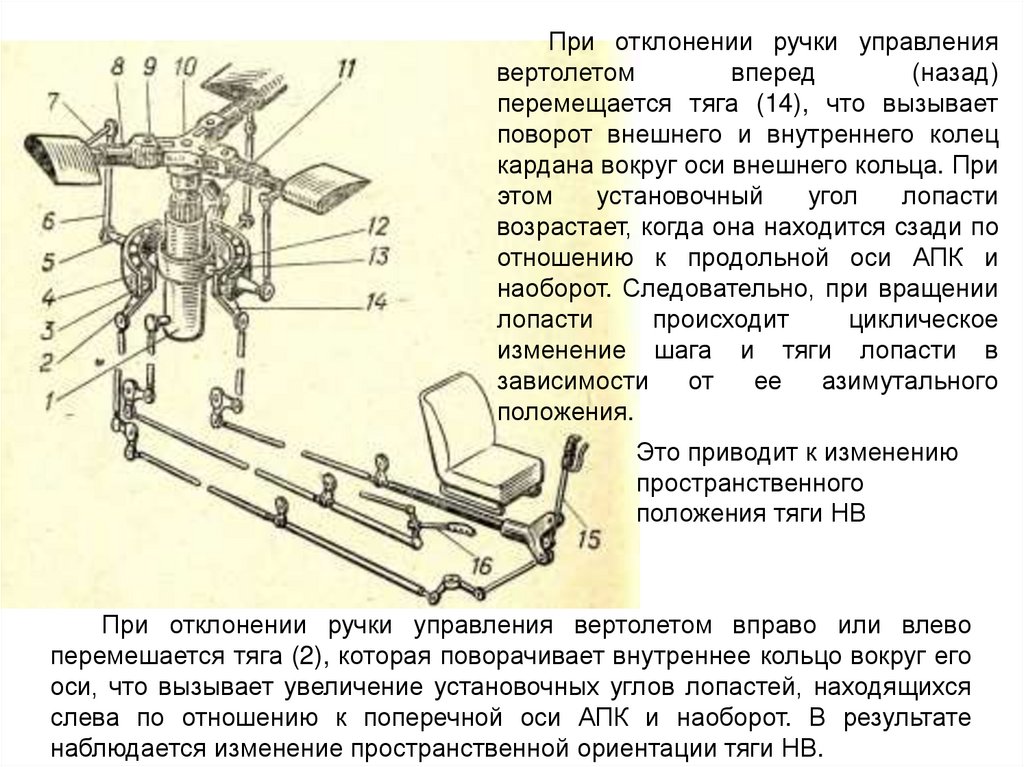
При отклонении ручки управлениявертолетом
вперед
(назад)
перемещается тяга (14), что вызывает
поворот внешнего и внутреннего колец
кардана вокруг оси внешнего кольца. При
этом
установочный
угол
лопасти
возрастает, когда она находится сзади по
отношению к продольной оси АПК и
наоборот. Следовательно, при вращении
лопасти
происходит
циклическое
изменение шага и тяги лопасти в
зависимости
от
ее
азимутального
положения.
Это приводит к изменению
пространственного
положения тяги НВ
При отклонении ручки управления вертолетом вправо или влево
перемешается тяга (2), которая поворачивает внутреннее кольцо вокруг его
оси, что вызывает увеличение установочных углов лопастей, находящихся
слева по отношению к поперечной оси АПК и наоборот. В результате
наблюдается изменение пространственной ориентации тяги НВ.
16.
Автомат перекоса управляется гидроусилителями, воздействующими на тягипоперечного (5) и продольного (9) управления, а также на рычаг общего шага (6).
При отклонении последнего ползун автомата перекоса движется вверх или вниз
по направляющей, при этом все вертикальные тяги (1) лопастей перемещаются на
одинаковые расстояния и поворачивают с помощью рычагов все лопасти на
одинаковый угол φ0, изменяющий общий шаг винта θ0. Управление общим шагом НВ
сопровождается также изменением мощности двигателей.
При отклонении тяги продольного управления внутреннее невращающееся кольцо
автомата перекоса поворачивается на угол χ, что вызывает поворот наружного
вращающегося кольца в том же направлении на тот же угол. Благодаря этому при
вращении НВ вертикальные тяги перемещаются вверх — вниз на различные
расстояния и поворачивают с помощью рычагов лопасти на различный в каждом
азимутальном положении ψл на угол φц (циклический угол установки)
В некотором азимутальном положении угол установки лопасти φ
минимальный, затем по мере ее вращения этот угол возрастает, достигая через полоборота НВ максимального значения. В течение следующей половины оборота НВ угол
φ уменьшается до исходного минимального значения.
Аналогичным образом изменяется угол установки лопастей при отклонении тяги
поперечного управления на угол η. Так происходит управление циклическим шагом
НВ (цикл изменения угла установки лопастей соответствует обороту НВ)
17.
6.17. Автоматическое управление вертолетомАвтопилот предназначен для облегчения работы летчика при пилотировании
вертолета. При пилотировании вертолета летчик управляет как угловыми
движениями, так и траекторными. Управление траекторией через угловое управление.
ЛЕТЧИК
РЫЧАГИ УПРАВЛЕНИЯ
НЕСУЩИМ И ХВОСТОВЫМ
ВИНТАМИ
ОРГАНЫ
УПРАВЛЕНИЯ
ВЕРТОЛЕТ
ИНФОРМАЦИЯ
ОТ ПРИБОРОВ
И ОРГАНОВ
ЧУВСТВ
ПИЛОТА
Схема ручного управления вертолетом.
ПАРАМЕТРЫ
УГЛОВОГО
ПОЛОЖЕНИЯ
ВЕРТОЛЕТА
18.
Схема включения каналов угловой стабилизации автопилота в систему управлениявертолета.
ЛЕТЧИК
РЫЧАГИ УПРАВЛЕНИЯ
НЕСУЩИМ И ХВОСТОВЫМ
ВИНТАМИ
ОРГАНЫ
УПРАВЛЕНИЯ
ВЕРТОЛЕТ
ПАРАМЕТРЫ
УГЛОВОГО
ПОЛОЖЕНИЯ
ВЕРТОЛЕТА
КОНТУР (1) АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
ИНФОРМАЦИЯ
ОТ ПРИБОРОВ
И ОРГАНОВ
ЧУВСТВ
ПИЛОТА
АВТОПИЛОТ
ДАТЧИКИ
КОНТУР (2) РУЧНОГО УПРАВЛЕНИЯ
Информация поступает от дистанционных датчиков сигналов углов курса, крена
и тангажа и датчиков угловых скоростей вращения вертолета вокруг 3-х
пространственных осей. Автопилот через ОУ воздействует на АПК. Таким образом
работает замкнутая система автоматического регулирования "вертолетавтопилот" (контур автоматического управления).
Особенностью данного автопилота является сохранение замкнутой системы
регулирования "вертолет-летчик" (контур ручного управления) даже при
работающем автопилоте.
19.
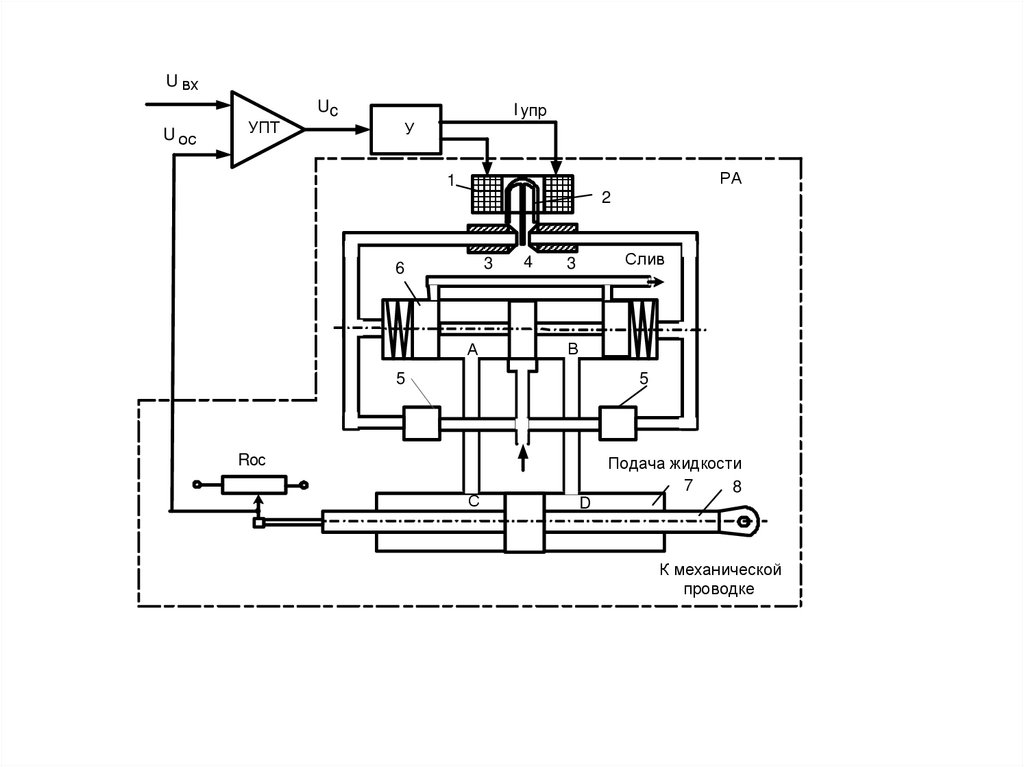
Дифференциальное управление осуществляется на вертолете припомощи электрогидравлических комбинированных агрегатов управления
(типа КАУ-З0Б, РА-60А, РП-28), устанавливаемых в систему управления
вертолета. Выходной шток таких рулевых агрегатов может перемещаться
как от рычагов управления летчика (при этом рулевой агрегат работает как
гидроусилитель, необходимый в системе управления вертолета для
уменьшения усилий, прикладываемых летчиком к рычагам управления),
так и от электрических сигналов автопилота, которые управляют
перемещением якоря специального электромагнитного поляризованного
реле, установленного в рулевом агрегате. Якорь поляризованного реле
перемещает специальный золотник (или сопло-заслонку), перемещение
которых в свою очередь вызывает перемещение выходного штока рулевого
агрегата. Перемещения органов управления от сигналов автопилота не
передаются на рычаги управления летчика и ограничены 20% полного
перемещения органов управления.
"Перегонкой" называется такой режим работы рулевого агрегата, при
котором происходит автоматическое перемещение с постоянной скоростью
выходного штока рулевого агрегата вместе с рычагами управления летчика.
20.
U вхU ос
УПТ
Uc
I упр
У
РА
1
2
3
6
А
4
Слив
3
В
5
5
Rос
С
Подача жидкости
7
8
D
К механической
проводке
21.
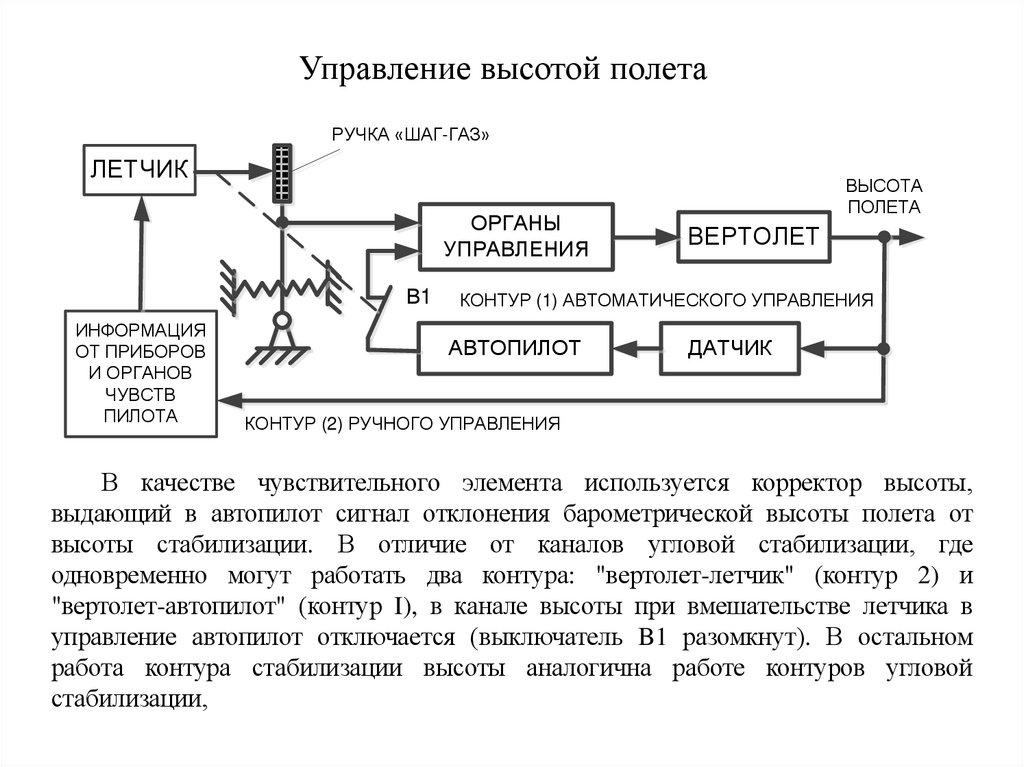
Управление высотой полетаРУЧКА «ШАГ-ГАЗ»
ЛЕТЧИК
ОРГАНЫ
УПРАВЛЕНИЯ
В1
ИНФОРМАЦИЯ
ОТ ПРИБОРОВ
И ОРГАНОВ
ЧУВСТВ
ПИЛОТА
ВЫСОТА
ПОЛЕТА
ВЕРТОЛЕТ
КОНТУР (1) АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
АВТОПИЛОТ
ДАТЧИК
КОНТУР (2) РУЧНОГО УПРАВЛЕНИЯ
В качестве чувствительного элемента используется корректор высоты,
выдающий в автопилот сигнал отклонения барометрической высоты полета от
высоты стабилизации. В отличие от каналов угловой стабилизации, где
одновременно могут работать два контура: "вертолет-летчик" (контур 2) и
"вертолет-автопилот" (контур I), в канале высоты при вмешательстве летчика в
управление автопилот отключается (выключатель B1 разомкнут). В остальном
работа контура стабилизации высоты аналогична работе контуров угловой
стабилизации,
22.
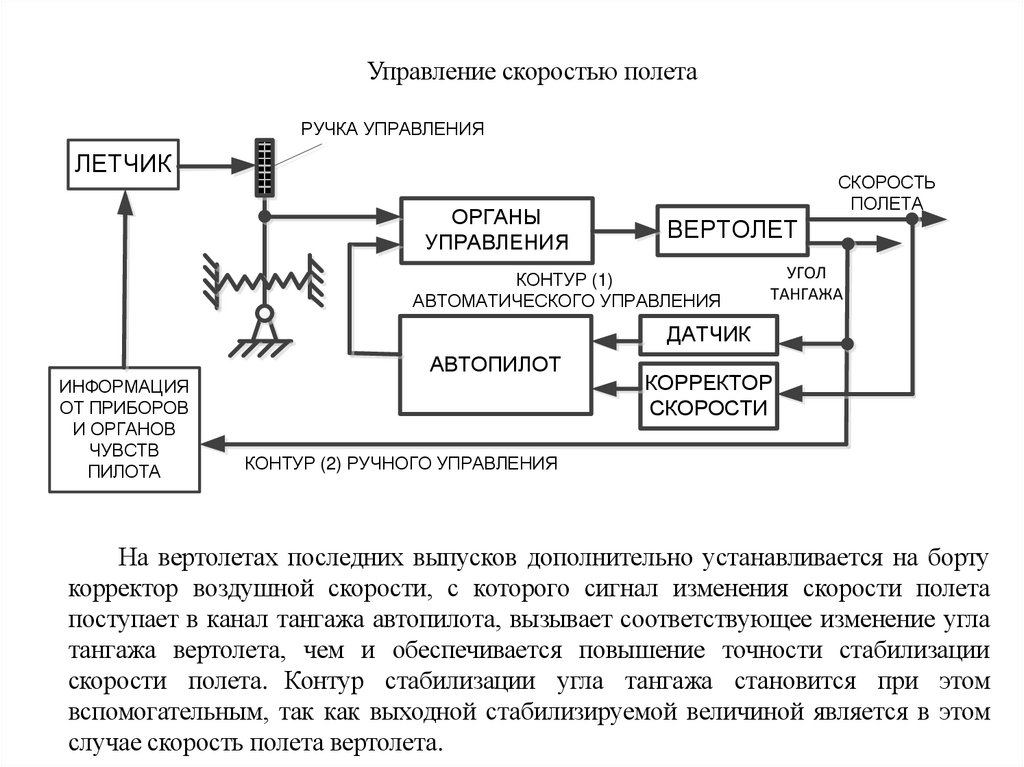
Управление скоростью полетаРУЧКА УПРАВЛЕНИЯ
ЛЕТЧИК
ОРГАНЫ
УПРАВЛЕНИЯ
СКОРОСТЬ
ПОЛЕТА
ВЕРТОЛЕТ
КОНТУР (1)
АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
УГОЛ
ТАНГАЖА
ДАТЧИК
АВТОПИЛОТ
ИНФОРМАЦИЯ
ОТ ПРИБОРОВ
И ОРГАНОВ
ЧУВСТВ
ПИЛОТА
КОРРЕКТОР
СКОРОСТИ
КОНТУР (2) РУЧНОГО УПРАВЛЕНИЯ
На вертолетах последних выпусков дополнительно устанавливается на борту
корректор воздушной скорости, с которого сигнал изменения скорости полета
поступает в канал тангажа автопилота, вызывает соответствующее изменение угла
тангажа вертолета, чем и обеспечивается повышение точности стабилизации
скорости полета. Контур стабилизации угла тангажа становится при этом
вспомогательным, так как выходной стабилизируемой величиной является в этом
случае скорость полета вертолета.