

 marketing
marketingSimilar presentations:










Herzlich willkommen. The agile manifesto
1.
HERZLICH WILLKOMMENThe Agile Manifesto
© 2025 OTH Amberg-Weiden
2.
Introduction01
02
03
04
05
Präsentationstitel | Verfasser
Introduction
Agents
Agent 1 Lab Layout Generator
Agent 1 Lab Layout Generator
Agent 2 Plan Viewer
06
07
08
09
10
Agent 2 Plan Viewer
Agent 3 Robot Executor
Agent 3 Robot Executor
Conclusion
Questions
08/11/25
2
3.
Introduction• This project involves the simulation of a robot
delivery system, where a robot autonomously
delivers packages from a central station to various
rooms. The robot has a limited energy capacity and
is capable of automatically planning its path.
08/11/25
Präsentationstitel | Verfasser
3
4.
AgentsProject overview
• The system is implemented using three distinct agents, each with
specific responsibilities:
• Agent 1 is responsible for constructing the map and layout. It places
rooms, the central station, corridors, and the director’s office, and
connects all elements within the environment. The connections
between rooms are generated using the Erdős–Rényi graph model.
• Agent 2 provides an interactive interface for users to define delivery
tasks by selecting pickup and drop-off locations. It also verifies the
connectivity between the selected points to ensure valid delivery
routes.
• Agent 3 simulates the robot’s movement through the environment,
executing delivery tasks assigned by Agent 2 and navigating the
grid accordingly.
Präsentationstitel | Verfasser
08/11/25
4
5.
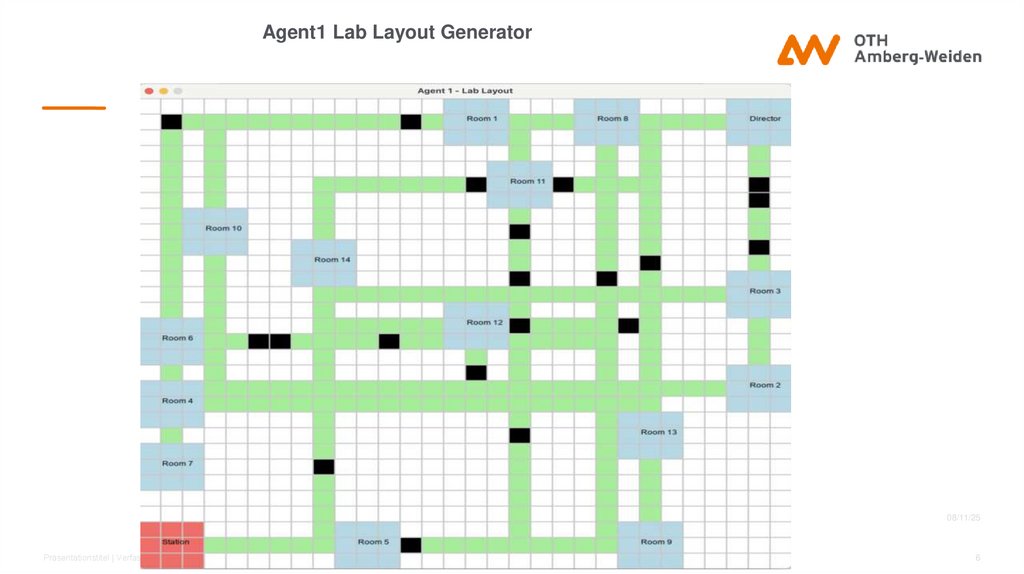
Agent 1 - Lab Layout GeneratorOverview
This agent generates a laboratory layout consisting of rooms,
corridors, and obstacles. The layout includes:
• A fixed station room in the bottom-left corner
• A director's room in the top-right corner
• Multiple randomly placed rooms (both edge and inner rooms)
• Connecting corridors between rooms
• Random obstacles placed in corridors
08/11/25
Präsentationstitel | Verfasser
5
6.
Agent1 Lab Layout Generator08/11/25
Präsentationstitel | Verfasser
6
7.
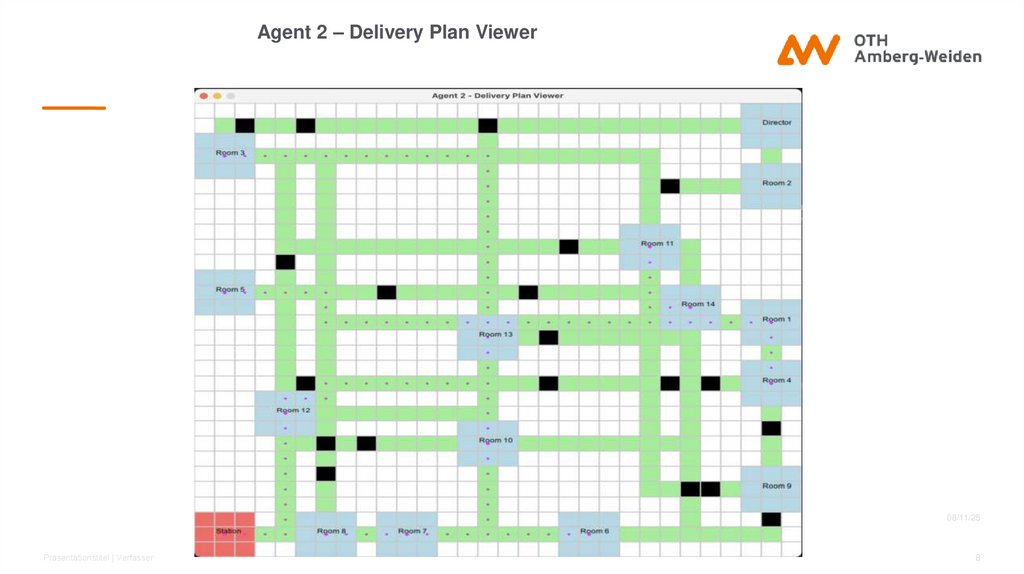
Agent 2 – Delivery Plan ViewerOverview
This agent provides an interactive interface for creating delivery orders
between locations in the lab layout generated by Agent 1. It visualizes
path connectivity and allows users to define pickup/drop-off pairs.
• Loads and visualizes the lab layout from layout.json
• Calculates reachability between all locations
• Interactive order creation via GUI
• Path visualization between selected points
• Saves connectivity data and orders to JSON files
08/11/25
Präsentationstitel | Verfasser
7
8.
Agent 2 – Delivery Plan Viewer08/11/25
Präsentationstitel | Verfasser
8
9.
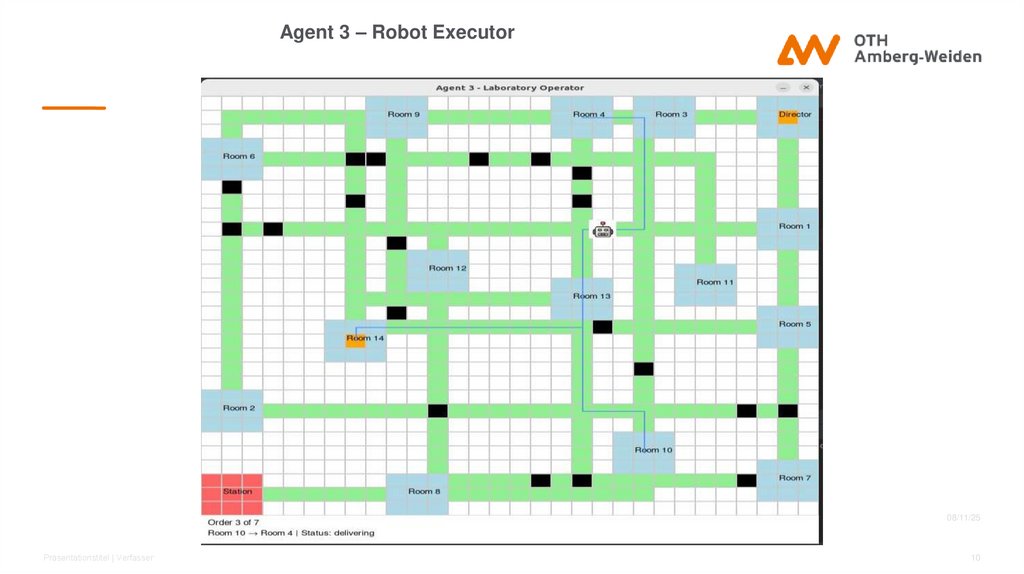
Agent 3 – Robot ExecutorOverview
This agent simulates a robot performing delivery tasks in the lab
environment. It loads the layout from Agent 1 and orders from Agent 2,
then visually executes the deliveries with two operational modes.
• Visual simulation of robot movement
• Two execution modes: batch processing and priority-based
• Pathfinding between locations
• Capacity-based order grouping
• Automatic return to station after deliveries
08/11/25
Präsentationstitel | Verfasser
9
10.
Agent 3 – Robot Executor08/11/25
Präsentationstitel | Verfasser
10
11.
ConclusionThe Lab Navigation and Delivery System successfully demonstrates a
multi-agent simulation where:
• Agent 1 (Layout Generator) creates a structured lab environment with
rooms, corridors, and obstacles.
• Agent 2 (Delivery Planner) analyzes reachability and allows
interactive order creation between locations.
• Agent 3 (Robot Executor) simulates a delivery robot navigating the
lab to fulfill orders efficiently.
08/11/25
Präsentationstitel | Verfasser
11
12.
VIELENDANK!
Ostbayerische
Technische Hochschule (OTH) AmbergWeiden
Kaiser-Wilhelm-Ring 23 | 92224 Amberg
Tel.: +49 (9621) 482-0
Fax: +49 (9621) 482-4991
amberg@oth-aw.de