
 warfare
warfareSimilar presentations:





 – эффективное средство вооруженной борьбы (основы технической подготовки и связи)")


")

Решения для БПЛА и навигационных систем
1.
Р ешения для БПЛА иНавигационных Систем
Представляю решения в области беспилотных летательных
аппаратов и навигационных систем, разработанные для
оборонной и авиационной промышленности, а также для
критически важных инфраструктурных объектов. Экспертиза
охватывает полный цикл создания и внедрения
высокотехнологичных комплексов.
2.
Опыт и ЭкспертизаЛабораторные Стенды (Зарница)
Авиационные Датчики (КПКБ)
Опыт полного цикла — от расчёта и
Глубокое понимание стандартов
проектирования до производства и
надёжности и методик расчёта (МКЭ)
внедрения лабораторных и
для критических систем в
испытательных стендов.
авиационной отрасли.
Стенды для БПЛА и Навигации
(Эникс)
Прямой опыт создания аппаратнопрограммных комплексов для
тестирования навигационной
аппаратуры и беспилотных
летательных аппаратов.
3.
Предлагаемые Решения: FPV-дрон-камикадзеОснащение FPV-дронов-камикадзе передовой системой
распознавания и преследования целей, обеспечивающей
высокую эффективность даже в самых сложных условиях.
Распознавание цели: Использование дообученной модели
YOLO для точной идентификации объектов.
Автономное преследование: Способность сохранять захват
цели даже при полной потере связи с оператором.
Комплексная система: Комбинация ИИ (YOLO) для
идентификации и компьютерного зрения (OpenCV) для
устойчивого сопровождения.
4.
Предлагаемые Р ешения: F P V-дрон-ретранслятор/разведчикЭти дроны разрабатываются для работы в условиях подавления GPS и
обеспечивают надёжную связь и разведку.
Устойчивость к РЭБ: Решение проблемы спуфинга GPS и
эффективная работа в «бесспутниковой» зоне.
Визуальная навигация: Захват и удержание геопозиции за счёт
компьютерного зрения (ориентация по объектам на земле),
минимизируя зависимость от спутниковых систем.
Ретрансляция связи: Обеспечение стабильной связи и
ретрансляции данных для других дронов в группе, расширяя
радиус действия и оперативность.
5.
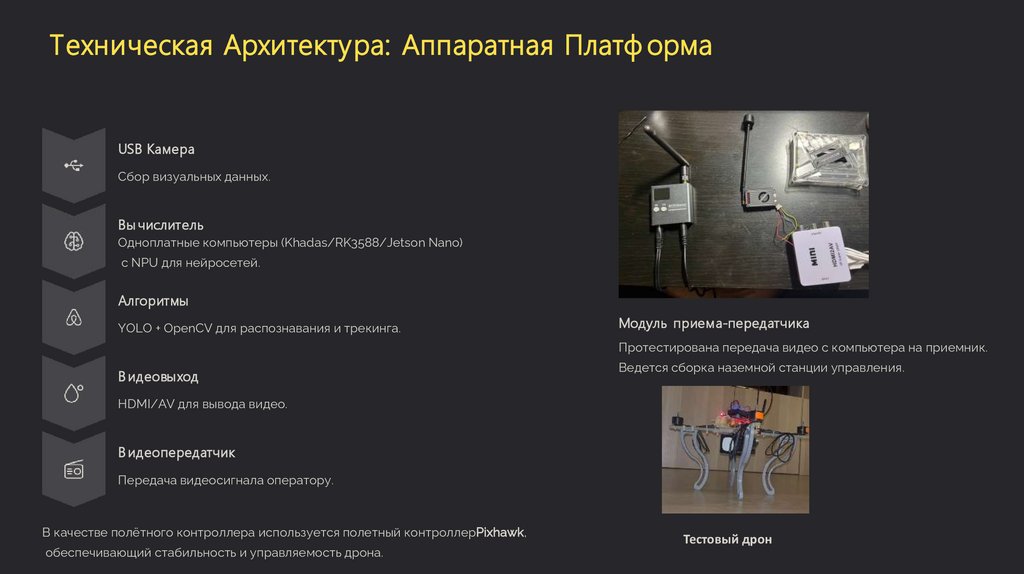
Техническая Архитектура: Аппаратная Платф ормаUSB Камера
Сбор визуальных данных.
Вы числитель
Одноплатные компьютеры (Khadas/RK3588/Jetson Nano)
с NPU для нейросетей.
Алгоритмы
YOLO + OpenCV для распознавания и трекинга.
Модуль приема-передатчика
Протестирована передача видео с компьютера на приемник.
В идеовыход
Ведется сборка наземной станции управления.
HDMI/AV для вывода видео.
В идеопередатчик
Передача видеосигнала оператору.
В качестве полётного контроллера используется полетный контроллерPixhawk,
обеспечивающий стабильность и управляемость дрона.
Тестовый дрон
6.
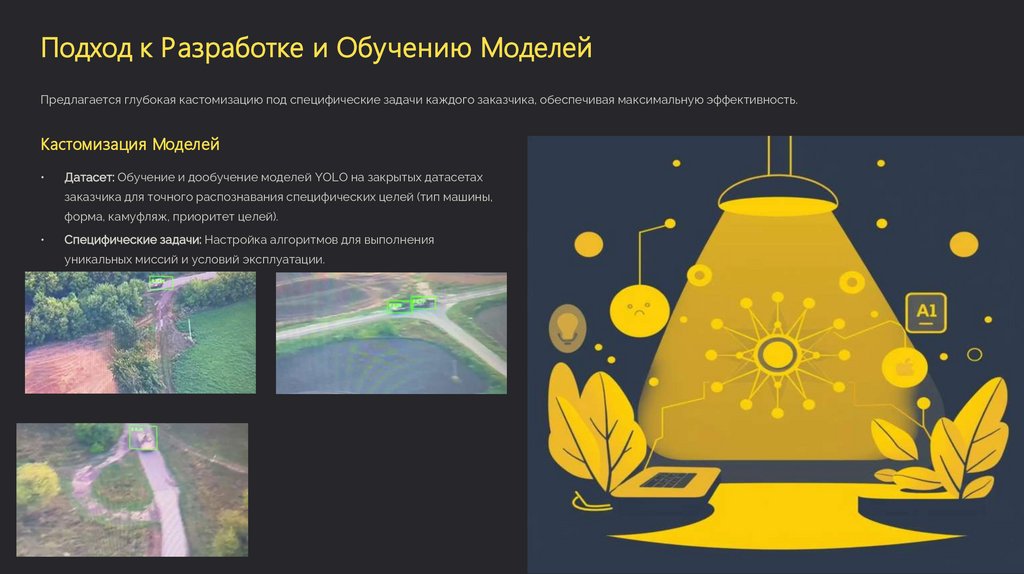
Подход к Разработке и Обучению МоделейПредлагается глубокая кастомизацию под специфические задачи каждого заказчика, обеспечивая максимальную эффективность.
Кастомизация Моделей
Датасет: Обучение и дообучение моделей YOLO на закрытых датасетах
заказчика для точного распознавания специфических целей (тип машины,
форма, камуфляж, приоритет целей).
Специфические задачи: Настройка алгоритмов для выполнения
уникальных миссий и условий эксплуатации.
7.
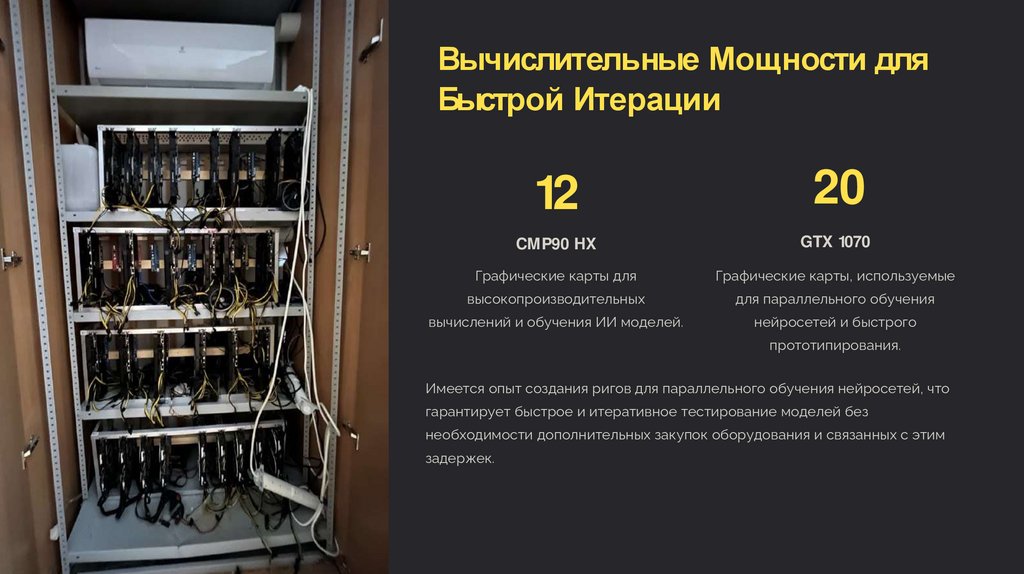
Вычислительные Мощности дляБыстрой Итерации
12
20
CMP90 HX
GTX 1070
Графические карты для
Графические карты, используемые
высокопроизводительных
для параллельного обучения
вычислений и обучения ИИ моделей.
нейросетей и быстрого
прототипирования.
Имеется опыт создания ригов для параллельного обучения нейросетей, что
гарантирует быстрое и итеративное тестирование моделей без
необходимости дополнительных закупок оборудования и связанных с этим
задержек.
8.
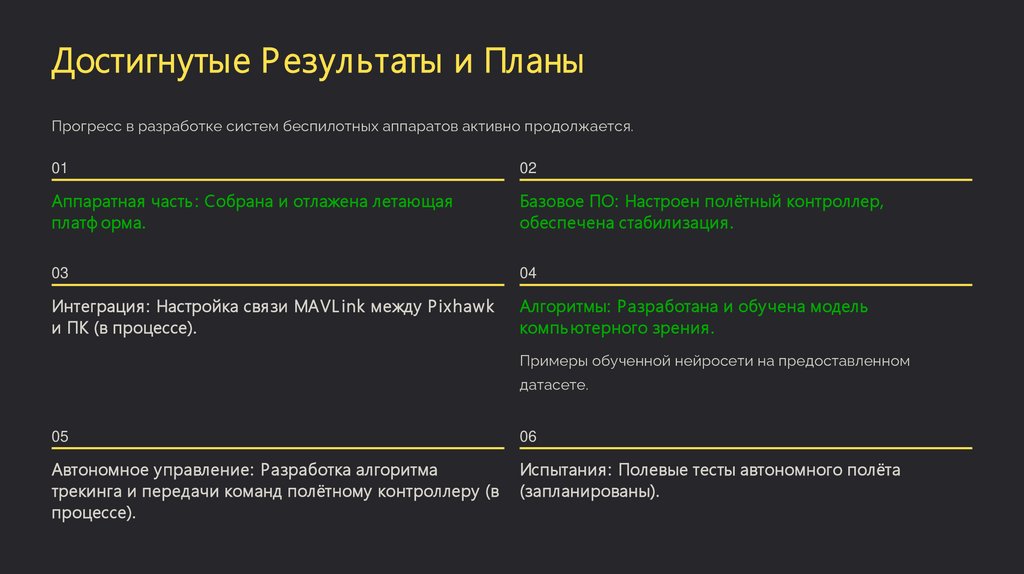
Достигнутые Р езультаты и ПланыПрогресс в разработке систем беспилотных аппаратов активно продолжается.
01
02
Аппаратная часть : Собрана и отлажена летающая
платф орма.
Базовое ПО: Настроен полётный контроллер,
обеспечена стабилизация.
03
04
Интеграция: Настройка связи MAVL ink между P ix hawk
и ПК (в процессе).
Алгоритмы: Разработана и обучена модель
компь ютерного зрения.
Примеры обученной нейросети на предоставленном
датасете.
05
06
Автономное управление: Разработка алгоритма
трекинга и передачи команд полётному контроллеру (в
процессе).
Испытания: Полевые тесты автономного полёта
(запланированы).
9.
Экономическое Обоснование:Стратегические Преимущества
Решения обладают высокой ценностью и широкими возможностями для применения.
Госсектор и Силовые Структуры
Охрана Критических Объектов
Решения, устойчивые к РЭБ, что
Применение для охраны периметра
является ключевым требованием в
АЭС, заводов, портов, где
современных конфликтах и операциях.
использование GPS может быть
ограничено или подавлено.
Вы сокая Маржинальность
Создаётся не просто железо, а целая экосистема: дрон + алгоритмы + обучение под
нужды клиента.
10.
Монетизация и Долгосрочная ЦенностьИнвестиции в технологии обеспечивают не только текущие преимущества, но и создают значительные нематериальные активы.
Патентование
Разработанные алгоритмы навигации по зрению и архитектура
системы являются интеллектуальной собственностью,
подлежащей патентованию.
Нематериальный актив: Увеличивает стоимость компании и её
конкурентоспособность.
Технологическое лидерство: Закрепляет позиции как
новаторов в области беспилотных технологий.