





 physics
physicsSimilar presentations:










Методы определения свойств объектов
1.
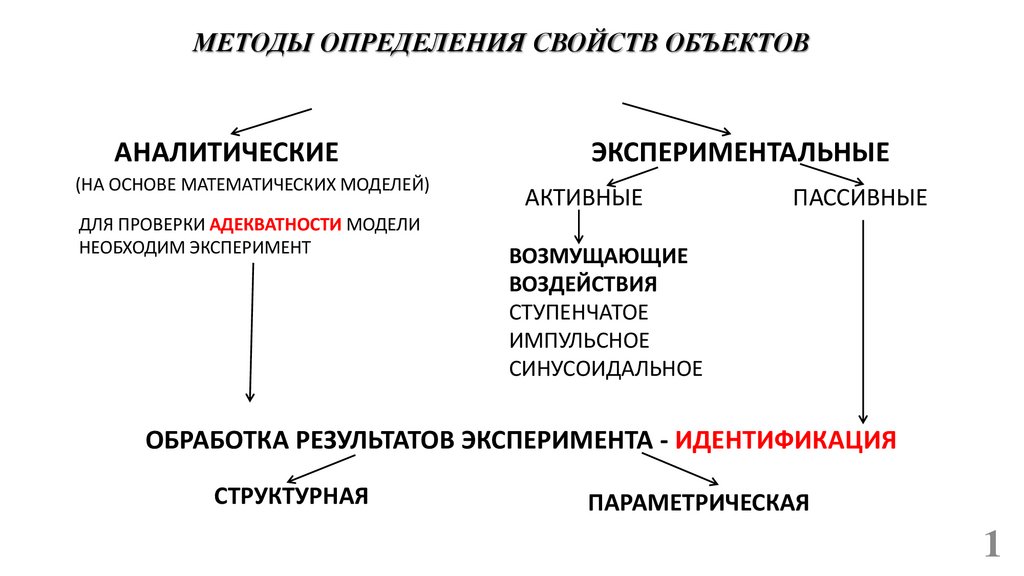
МЕТОДЫ ОПРЕДЕЛЕНИЯ СВОЙСТВ ОБЪЕКТОВАНАЛИТИЧЕСКИЕ
(НА ОСНОВЕ МАТЕМАТИЧЕСКИХ МОДЕЛЕЙ)
ДЛЯ ПРОВЕРКИ АДЕКВАТНОСТИ МОДЕЛИ
НЕОБХОДИМ ЭКСПЕРИМЕНТ
ЭКСПЕРИМЕНТАЛЬНЫЕ
АКТИВНЫЕ
ПАССИВНЫЕ
ВОЗМУЩАЮЩИЕ
ВОЗДЕЙСТВИЯ
СТУПЕНЧАТОЕ
ИМПУЛЬСНОЕ
СИНУСОИДАЛЬНОЕ
ОБРАБОТКА РЕЗУЛЬТАТОВ ЭКСПЕРИМЕНТА - ИДЕНТИФИКАЦИЯ
СТРУКТУРНАЯ
ПАРАМЕТРИЧЕСКАЯ
1
2.
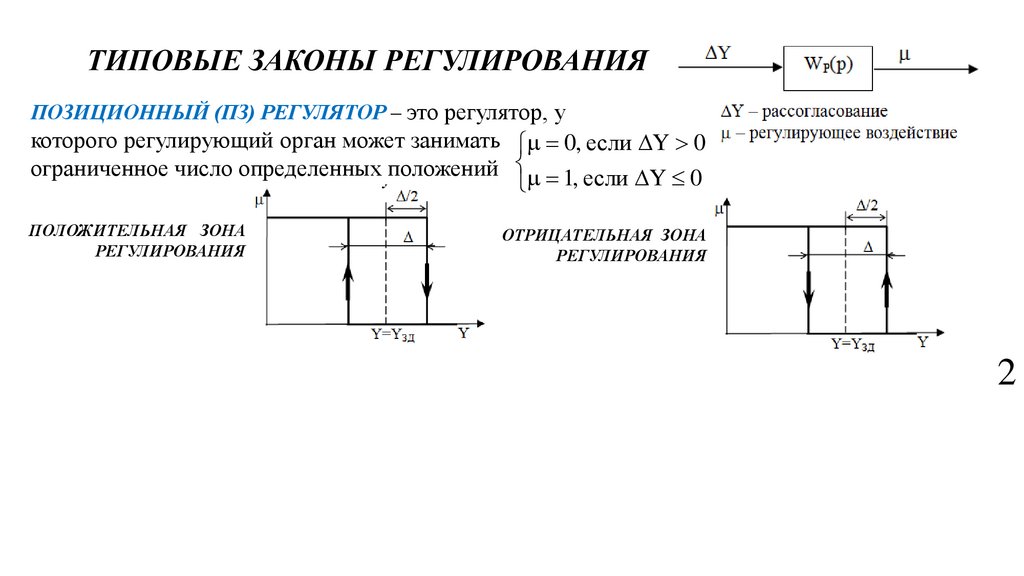
ТИПОВЫЕ ЗАКОНЫ РЕГУЛИРОВАНИЯПОЗИЦИОННЫЙ (ПЗ) РЕГУЛЯТОР – это регулятор, у
которого регулирующий орган может занимать 0, если Y 0
ограниченное число определенных положений 1, если Y 0
ПОЛОЖИТЕЛЬНАЯ ЗОНА
РЕГУЛИРОВАНИЯ
ОТРИЦАТЕЛЬНАЯ ЗОНА
РЕГУЛИРОВАНИЯ
2
3.
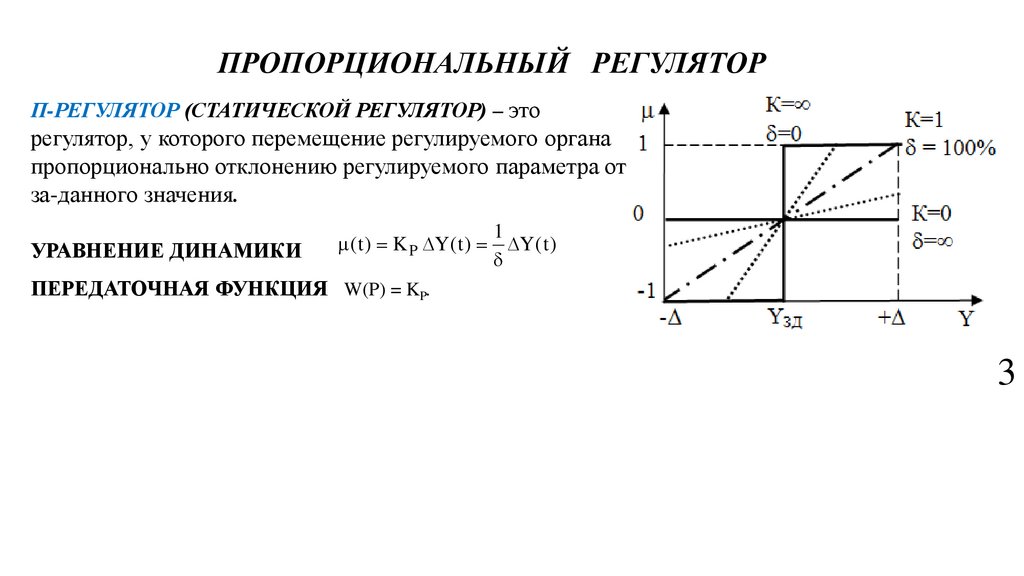
ПРОПОРЦИОНАЛЬНЫЙ РЕГУЛЯТОРП-РЕГУЛЯТОР (СТАТИЧЕСКОЙ РЕГУЛЯТОР) – это
регулятор, у которого перемещение регулируемого органа
пропорционально отклонению регулируемого параметра от
за-данного значения.
УРАВНЕНИЕ ДИНАМИКИ
1
( t ) K P Y ( t ) Y ( t )
ПЕРЕДАТОЧНАЯ ФУНКЦИЯ W(P) = KP.
3
4.
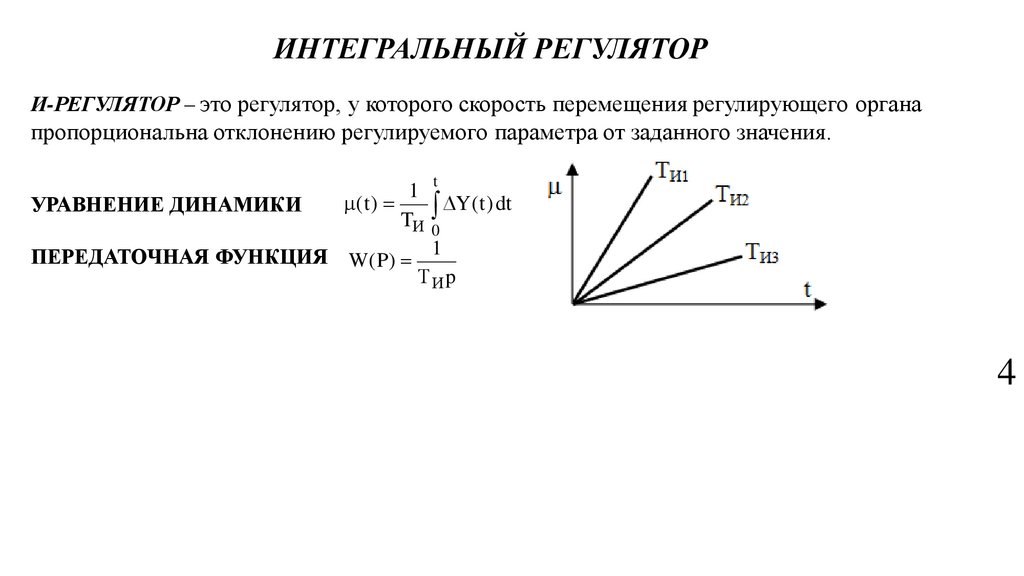
ИНТЕГРАЛЬНЫЙ РЕГУЛЯТОРИ-РЕГУЛЯТОР – это регулятор, у которого скорость перемещения регулирующего органа
пропорциональна отклонению регулируемого параметра от заданного значения.
t
1
( t )
Y ( t ) dt
УРАВНЕНИЕ ДИНАМИКИ
TИ 0
ПЕРЕДАТОЧНАЯ ФУНКЦИЯ W( P) 1
ТИp
4
5.
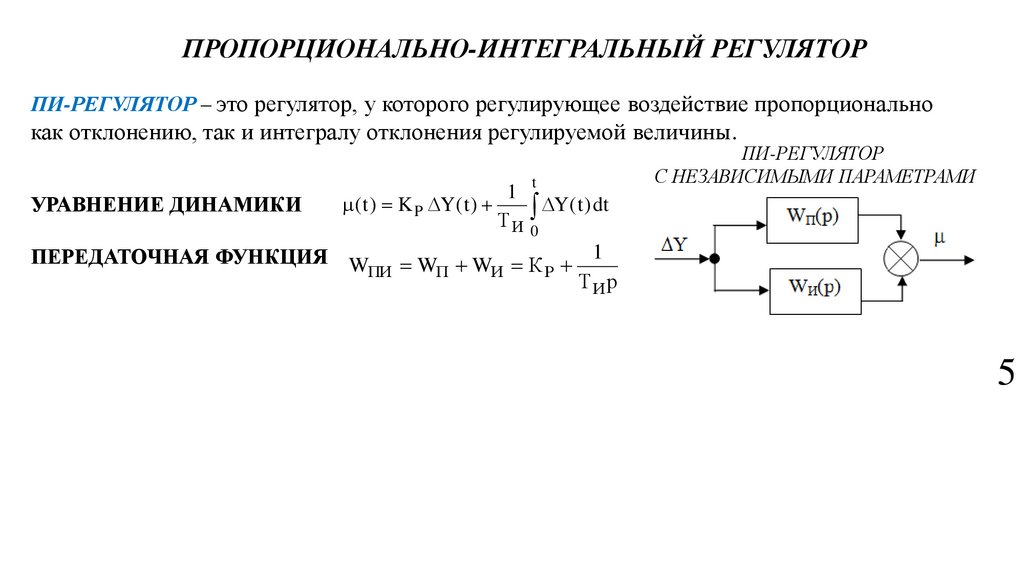
ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНЫЙ РЕГУЛЯТОРПИ-РЕГУЛЯТОР – это регулятор, у которого регулирующее воздействие пропорционально
как отклонению, так и интегралу отклонения регулируемой величины.
t
УРАВНЕНИЕ ДИНАМИКИ
1
( t ) K P Y ( t )
Y ( t ) dt
ТИ 0
ПИ-РЕГУЛЯТОР
С НЕЗАВИСИМЫМИ ПАРАМЕТРАМИ
ПЕРЕДАТОЧНАЯ ФУНКЦИЯ W W W К 1
ПИ
П
И
Р
ТИр
5
6.
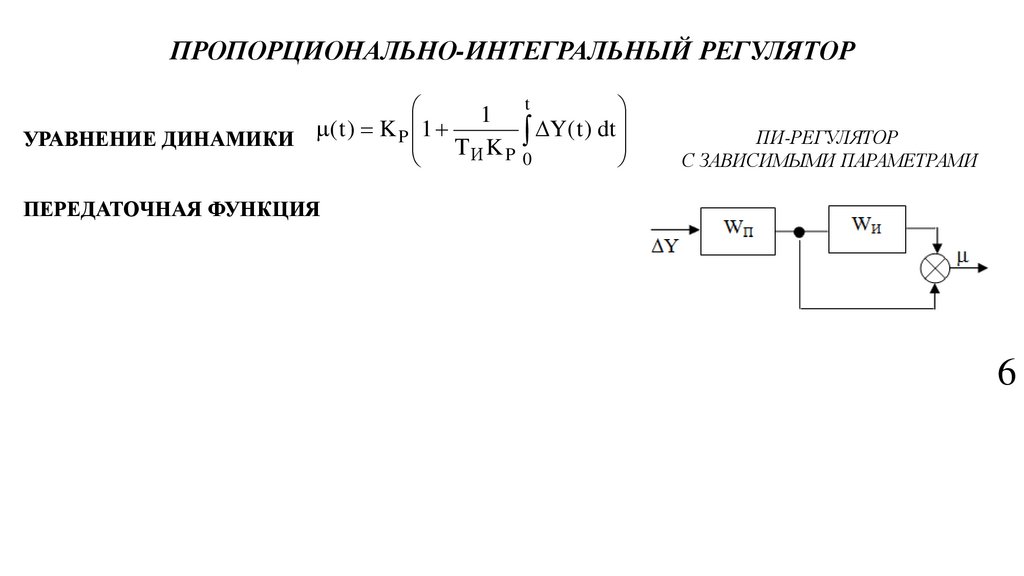
ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНЫЙ РЕГУЛЯТОРt
1
(
t
)
K
1
Y
(
t
)
dt
P
УРАВНЕНИЕ ДИНАМИКИ
ТИKP
0
ПИ-РЕГУЛЯТОР
С ЗАВИСИМЫМИ ПАРАМЕТРАМИ
ПЕРЕДАТОЧНАЯ ФУНКЦИЯ
6
7.
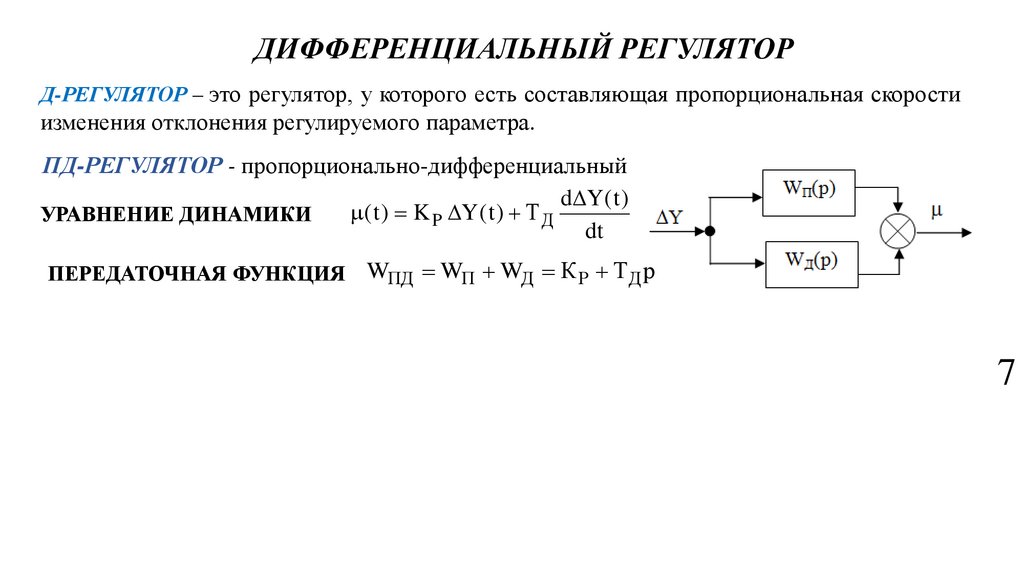
ДИФФЕРЕНЦИАЛЬНЫЙ РЕГУЛЯТОРД-РЕГУЛЯТОР – это регулятор, у которого есть составляющая пропорциональная скорости
изменения отклонения регулируемого параметра.
ПД-РЕГУЛЯТОР - пропорционально-дифференциальный
d Y ( t )
( t ) K P Y ( t ) Т Д
УРАВНЕНИЕ ДИНАМИКИ
dt
ПЕРЕДАТОЧНАЯ ФУНКЦИЯ WПД WП WД К Р Т Д р
7
8.
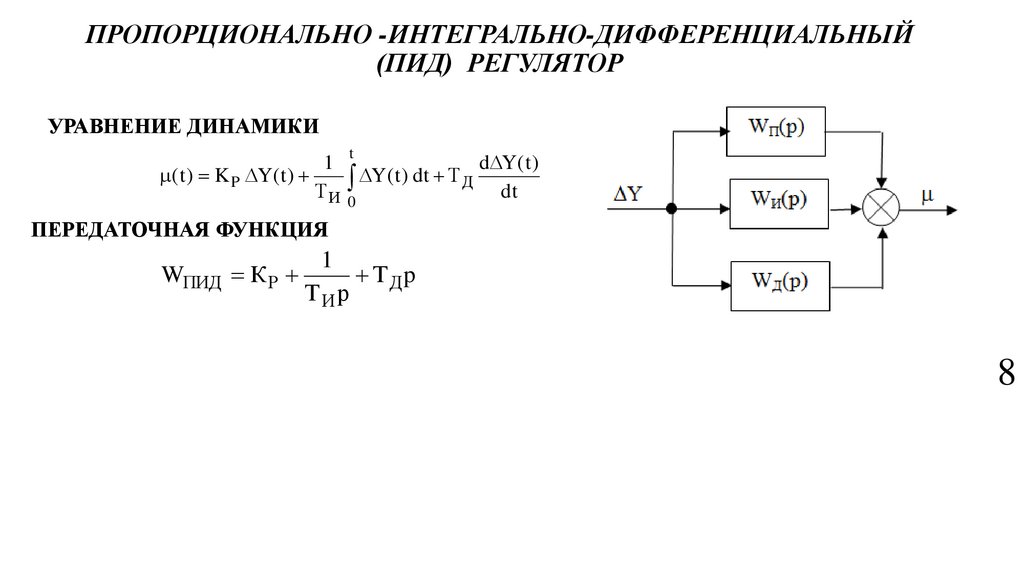
ПРОПОРЦИОНАЛЬНО -ИНТЕГРАЛЬНО-ДИФФЕРЕНЦИАЛЬНЫЙ(ПИД) РЕГУЛЯТОР
УРАВНЕНИЕ ДИНАМИКИ
t
1
d Y( t )
( t ) K P Y( t )
Y
(
t
)
dt
Т
Д
Т И 0
dt
ПЕРЕДАТОЧНАЯ ФУНКЦИЯ
WПИД К Р
1
ТИр
ТД p
8
9.
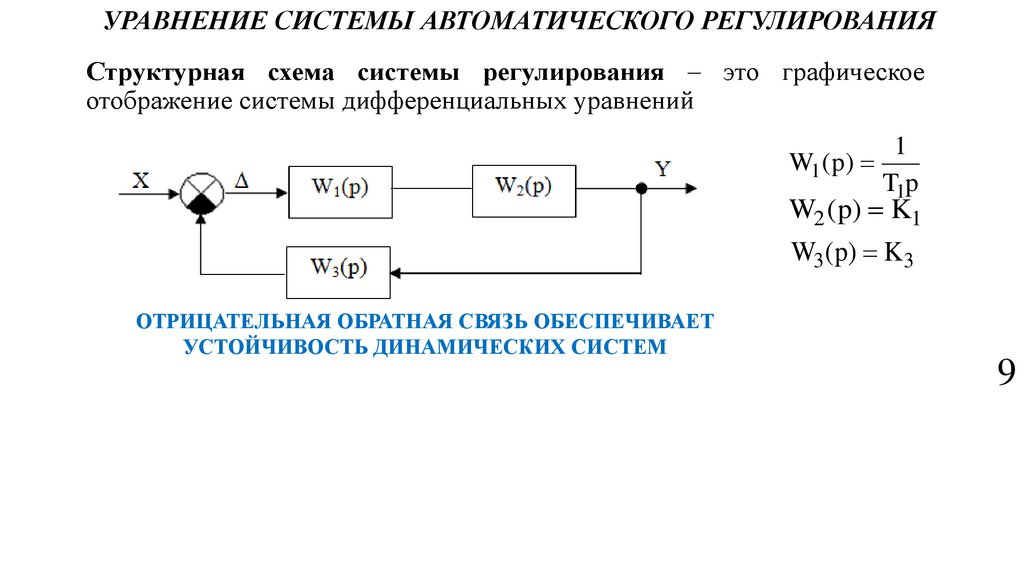
УРАВНЕНИЕ СИСТЕМЫ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯСтруктурная схема системы регулирования – это графическое
отображение системы дифференциальных уравнений
1
W1 ( p)
T1p
W2 ( p) K1
W3 (p) K3
ОТРИЦАТЕЛЬНАЯ ОБРАТНАЯ СВЯЗЬ ОБЕСПЕЧИВАЕТ
УСТОЙЧИВОСТЬ ДИНАМИЧЕСКИХ СИСТЕМ
9
10.
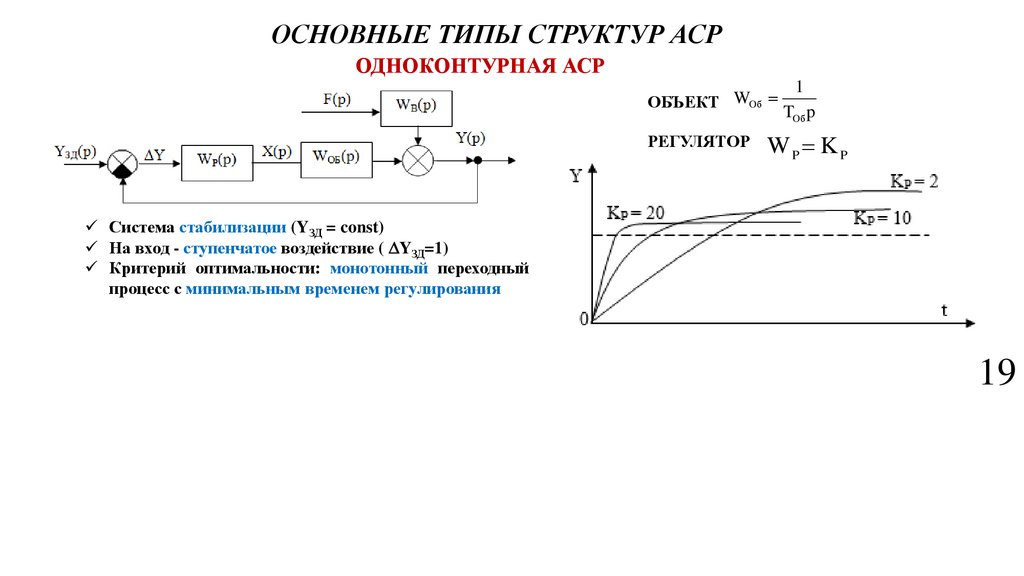
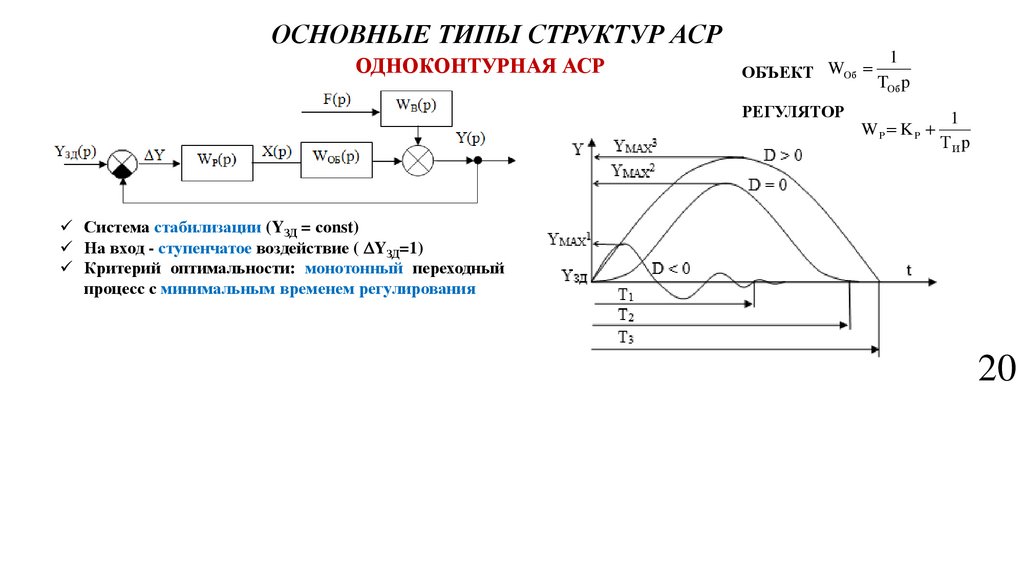
СТРУКТУРА ОДНОКОНТУРНОЙ СИСТЕМЫ РЕГУЛИРОВАНИЯ39
11.
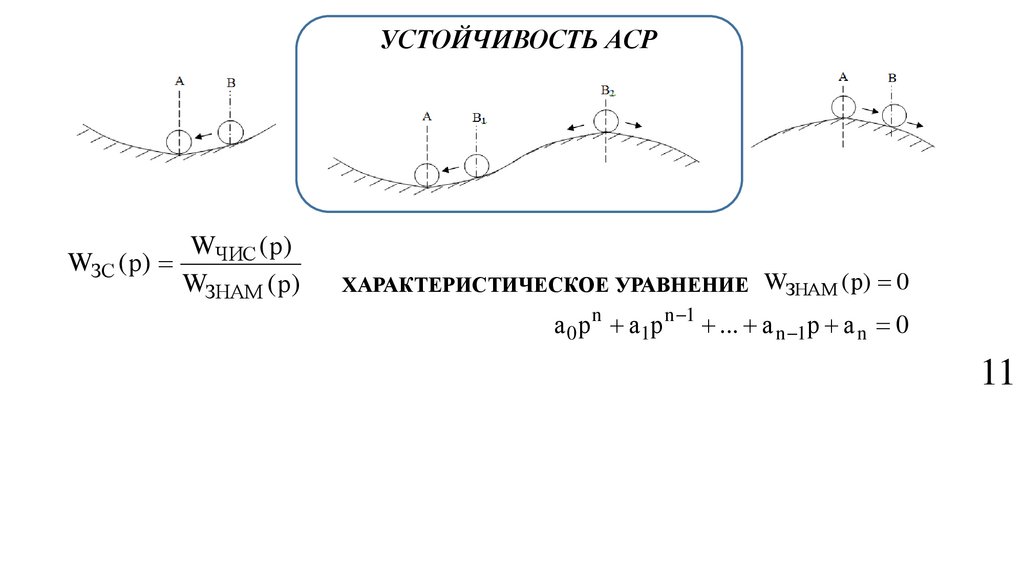
УСТОЙЧИВОСТЬ АСРWЧИС ( р)
WЗС ( р)
WЗНАМ ( р)
ХАРАКТЕРИСТИЧЕСКОЕ УРАВНЕНИЕ WЗНАМ ( р) 0
а 0 р n а1р n 1 ... а n 1р а n 0
11
12.
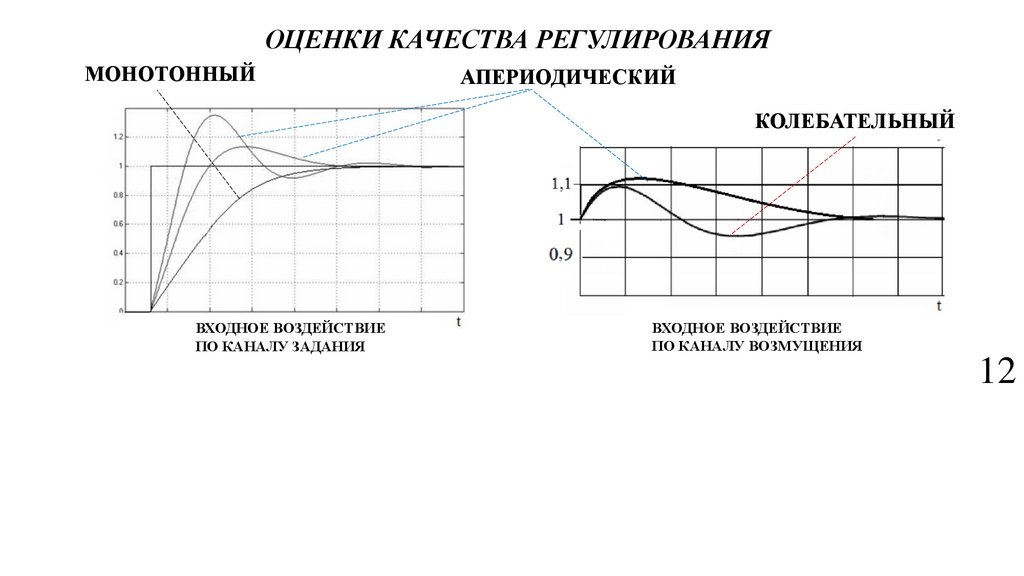
ОЦЕНКИ КАЧЕСТВА РЕГУЛИРОВАНИЯМОНОТОННЫЙ
АПЕРИОДИЧЕСКИЙ
КОЛЕБАТЕЛЬНЫЙ
ВХОДНОЕ ВОЗДЕЙСТВИЕ
ПО КАНАЛУ ЗАДАНИЯ
ВХОДНОЕ ВОЗДЕЙСТВИЕ
ПО КАНАЛУ ВОЗМУЩЕНИЯ
12
13.
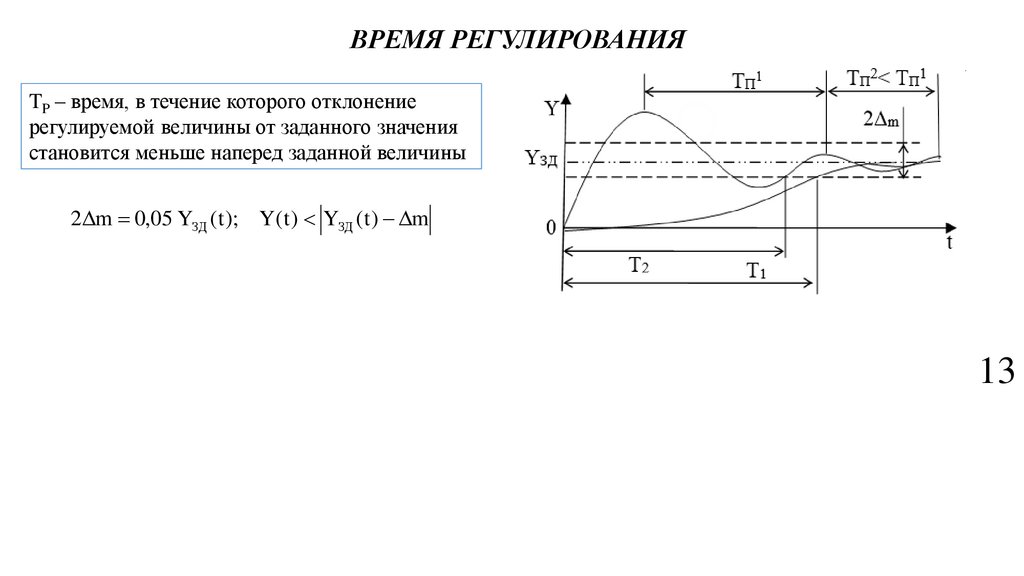
ВРЕМЯ РЕГУЛИРОВАНИЯTP – время, в течение которого отклонение
регулируемой величины от заданного значения
становится меньше наперед заданной величины
2 m 0,05 YЗД ( t ); Y( t ) YЗД ( t ) m
13
14.
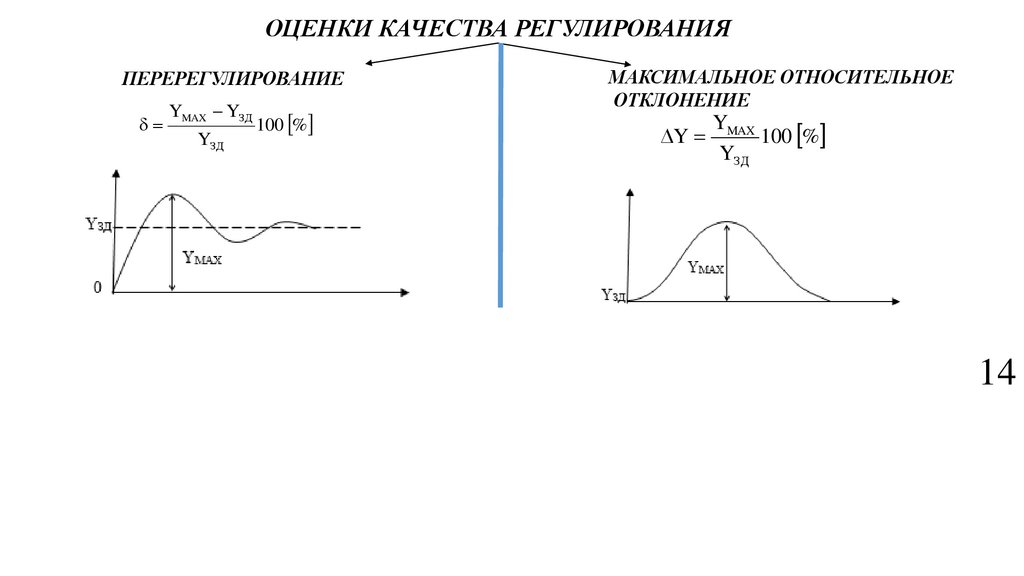
ОЦЕНКИ КАЧЕСТВА РЕГУЛИРОВАНИЯПЕРЕРЕГУЛИРОВАНИЕ
YMAX YЗД
YЗД
100 %
МАКСИМАЛЬНОЕ ОТНОСИТЕЛЬНОЕ
ОТКЛОНЕНИЕ
Y
YMAX
100 %
YЗД
14
15.
ОЦЕНКИ КАЧЕСТВА РЕГУЛИРОВАНИЯУСТАНОВИВШЕЕСЯ
ОТКЛОНЕНИЕ
ПЕРИОД КОЛЕБАНИЙ,
ЧАСТОТА
КОЛЕБАТЕЛЬНОСТЬ
YMAX 2 YЗД
ЗАТУХАНИЕ Y
MAX1
YЗД
15
16.
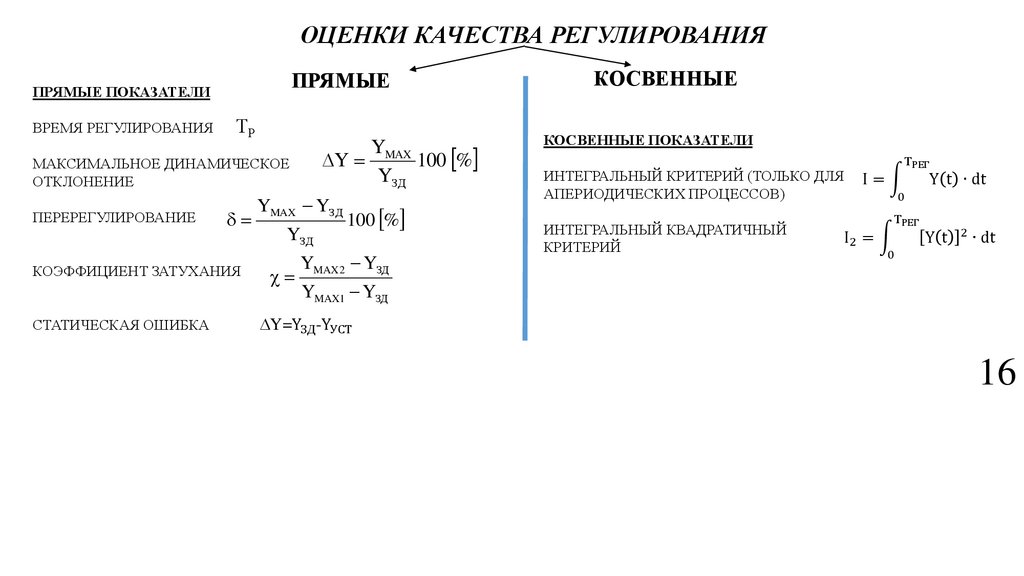
ОЦЕНКИ КАЧЕСТВА РЕГУЛИРОВАНИЯПРЯМЫЕ
ПРЯМЫЕ ПОКАЗАТЕЛИ
ВРЕМЯ РЕГУЛИРОВАНИЯ
ТР
Y
Y MAX 100 %
YЗД
МАКСИМАЛЬНОЕ ДИНАМИЧЕСКОЕ
ОТКЛОНЕНИЕ
ПЕРЕРЕГУЛИРОВАНИЕ
YMAX YЗД
YЗД
100 %
YMAX 2 YЗД
КОЭФФИЦИЕНТ ЗАТУХАНИЯ
СТАТИЧЕСКАЯ ОШИБКА
Y=YЗД -YУСТ
КОСВЕННЫЕ
КОСВЕННЫЕ ПОКАЗАТЕЛИ
ИНТЕГРАЛЬНЫЙ КРИТЕРИЙ (ТОЛЬКО ДЛЯ
АПЕРИОДИЧЕСКИХ ПРОЦЕССОВ)
ИНТЕГРАЛЬНЫЙ КВАДРАТИЧНЫЙ
КРИТЕРИЙ
TРЕГ
I=
I2 =
Y t ∙ dt
0
TРЕГ
Y t
2 ∙ dt
0
YMAX1 YЗД
16
17.
СИНТЕЗ АСРСТРУКТУРНЫЙ
ПАРАМЕТРИЧЕСКИЙ
ИСХОДНЫЕ ДАННЫЕ: МАТЕМАТИЧЕСКАЯ МОДЕЛЬ ОБЪЕКТА РЕГУЛИРОВАНИЯ, ПАРАМЕТРЫ
РЕГУЛИРУЕМОЙ ПЕРЕМЕННОЙ, УПРАВЛЯЮЩЕГО ВОЗДЕЙСТВИЯ И ВОЗМУЩЕНИЙ
ФОРМУЛИРОВКА КРИТЕРИЯ ОПТИМАЛЬНОСТИ
ВЫБОР СТРУКТУРЫ СИСТЕМЫ И
ЗАКОНА РЕГУЛИРОВАНИЯ
ВЫБОР ПАРАМЕТРОВ ЗАКОНА
РЕГУЛИРОВАНИЯ
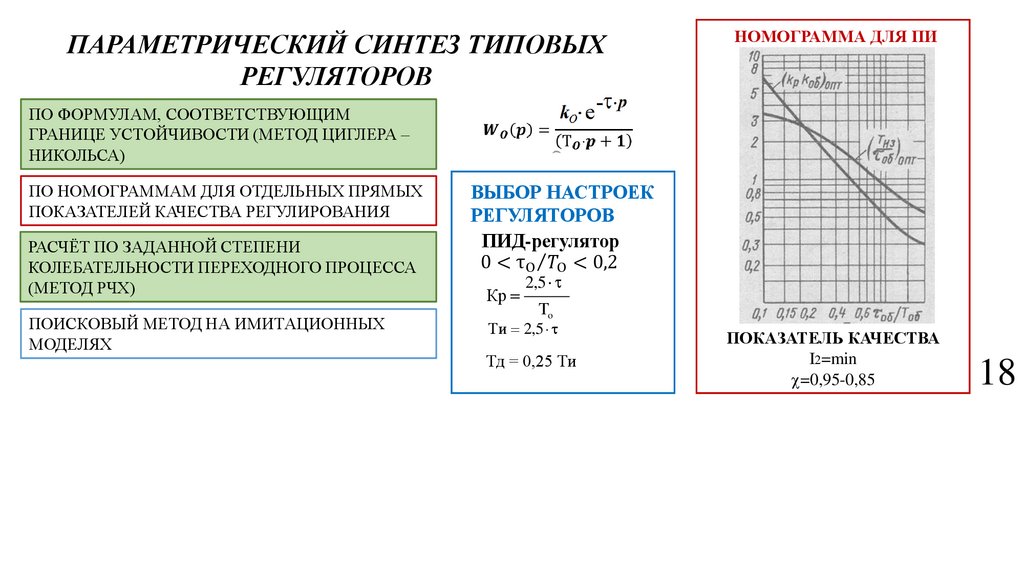
П-регулятор
τO