








")




 mechanics
mechanicsSimilar presentations:






")



Кулачковые механизмы
1. Кулачковые механизмы
Кулачковымназывается
трехзвенный
механизм с высшей кинематической парой
входное звено которого называется кулачком,
а
выходное
–
толкателем
(движется
поступательно)
или
коромыслом
(поворачивается) .
Часто для замены в высшей паре трения
скольжения трением качения и уменьшения
износа, как кулачка, так и толкателя, в схему
механизма включают дополнительное звено –
ролик и вращательную кинематическую пару.
2. Кулачковые механизмы
Кулачковый ПМтрехзвенный (здесь 4звена) механизм с
высшей
кинематической
парой. Входное
звено называется
кулачком, выходное
– толкателем
(движется
поступательно) или
коромыслом
(поворачивается) .
3.
НазначениеКулачковые механизмы предназначены для
преобразования
вращательного
или
поступательного
движения
кулачка
в
возвратно-вращательное или возвратнопоступательное
движение
толкателя.
Применяется в устройствах цикловой
автоматики,
управления
и
других
устройствах.
В простом механизме с двумя подвижными
звеньями можно реализовать преобразование
движения по сложному закону.
4.
Две группы кулачковых механизмовМеханизмы первой группы обеспечивают
перемещение толкателя по заданному закону
движения. (ЭТО ДОРОГО И СЛОЖНО В
ИЗГОТОВЛЕНИИ)
Механизмы второй группы обеспечивают
только заданное максимальное перемещение
выходного звена – ход толкателя. При этом
закон, по которому осуществляется это
перемещение, выбирается из набора типовых
законов движения в зависимости от условий
эксплуатации и технологии изготовления
кулачков.
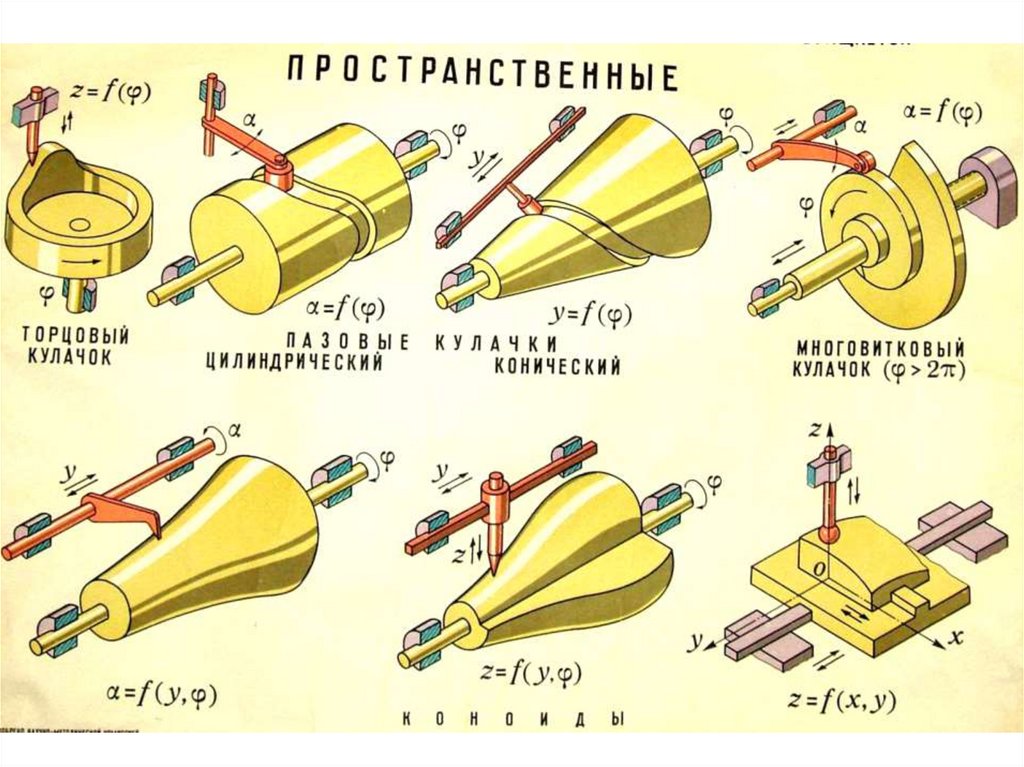
5.
Классификацию кулачковыхмеханизмов проводят по
различным признакам:
•по расположению звеньев в
пространстве
•пространственные
•плоские
•по движению кулачка
•вращательное
•поступательное
•винтовое
•по движению выходного звена
•возвратно-поступательное ( с
толкателем)
•возвратно-вращательное ( с
коромыслом)
•по наличию ролика
•с роликом
•без ролика
•по виду кулачка
•дисковый (плоский)
•цилиндрический •коноид
(сложный пространственный)
•по форме рабочей поверхности
выходного звена
•плоская
•заостренная
•цилиндрическая
•сферическая
•эвольвентная
•по способу замыкания
элементов высшей пары
•силовое
•геометрическое
6.
7.
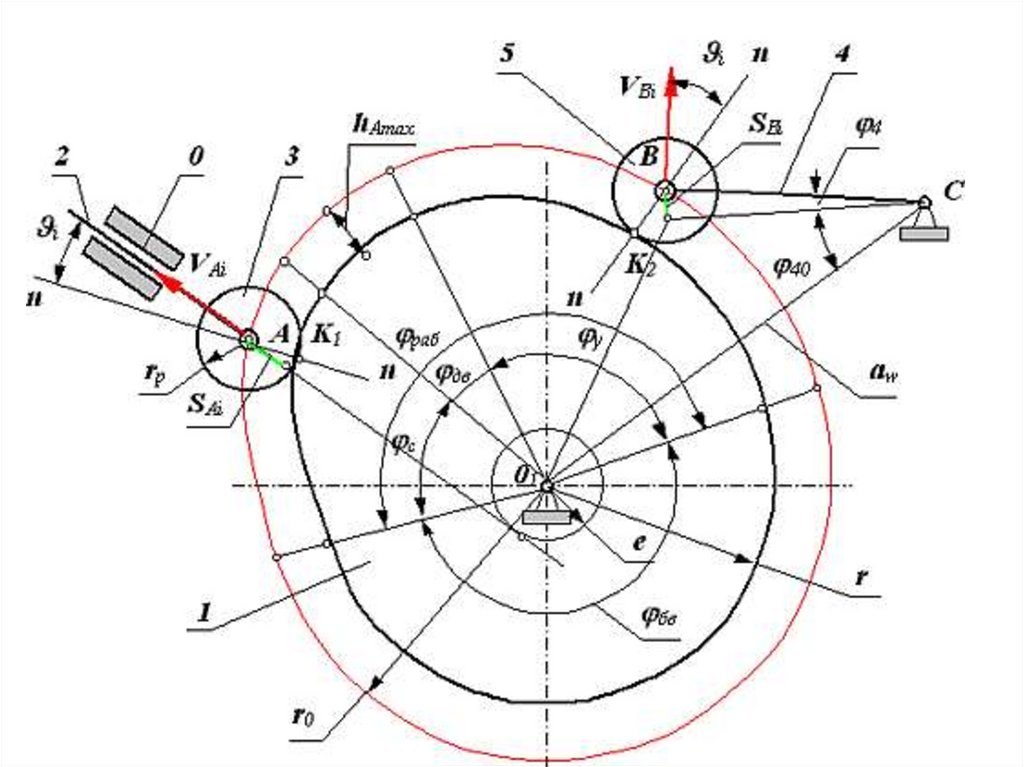
8. СХЕМА КУЛАЧКОВОГО МЕХАНИЗМА
Большинство кулачковых механизмов относится кцикловым механизмам с периодом цикла равным
2 . В цикле движения толкателя в общем случае
можно выделить четыре фазы: удаления,
дальнего выстоя, сближения и ближнего выстоя.
В соответствии с этим, углы поворота кулачка или
фазовые углы делятся на:
1. •угол удаления y
2. •угол дальнего выстоя дв
3. •угол сближения с
4. •угол ближнего выстоя бв.
• Сумма трех углов образует угол раб, который
называется рабочим углом.
раб = у + дв + с .
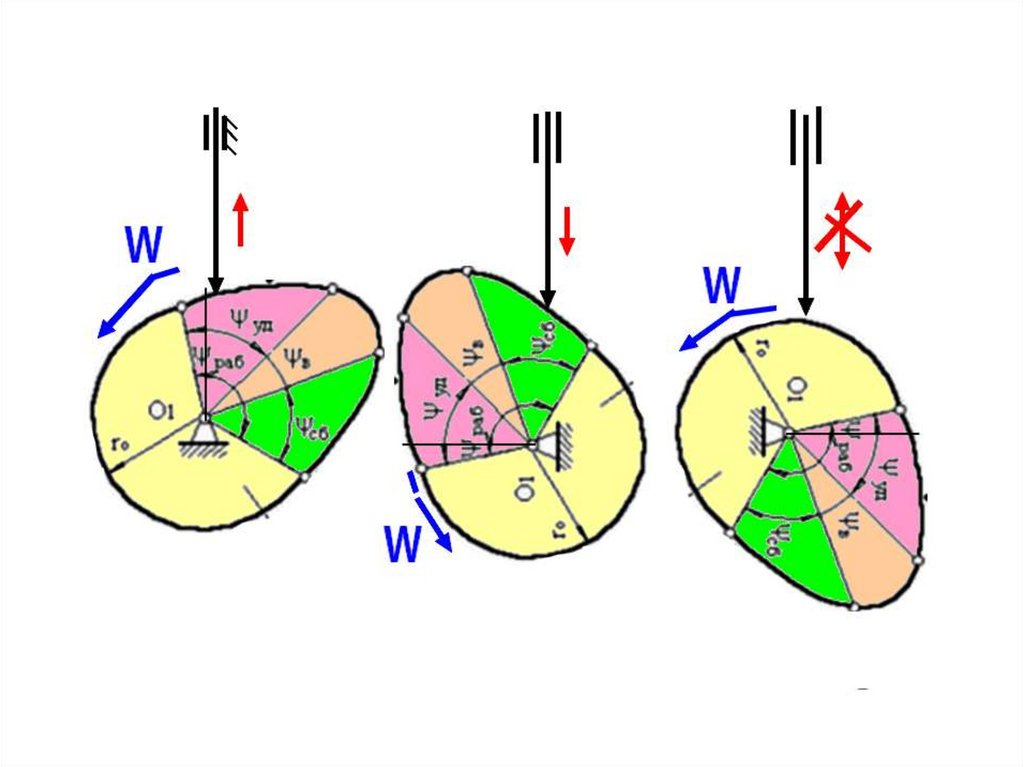
9. 4 фазы работы Кулачкового ПМ
10.
11. Схемы Кулачковых ПМ - аксиальная или осевая и дезаксиальная- внеосевая
12.
13. Исследования Кул. ПМ.
Цель: определение закона движения ведомогозвена (Кинематическое исследование –
нахождение перемещений , скоростей и
ускорений звеньев).
Исследование
ускорений
позволяет
установить режим работы : «без ударов» и «с
ударами».
Методы: аналитический (в простых случаях) и
графический (наиболее общий).
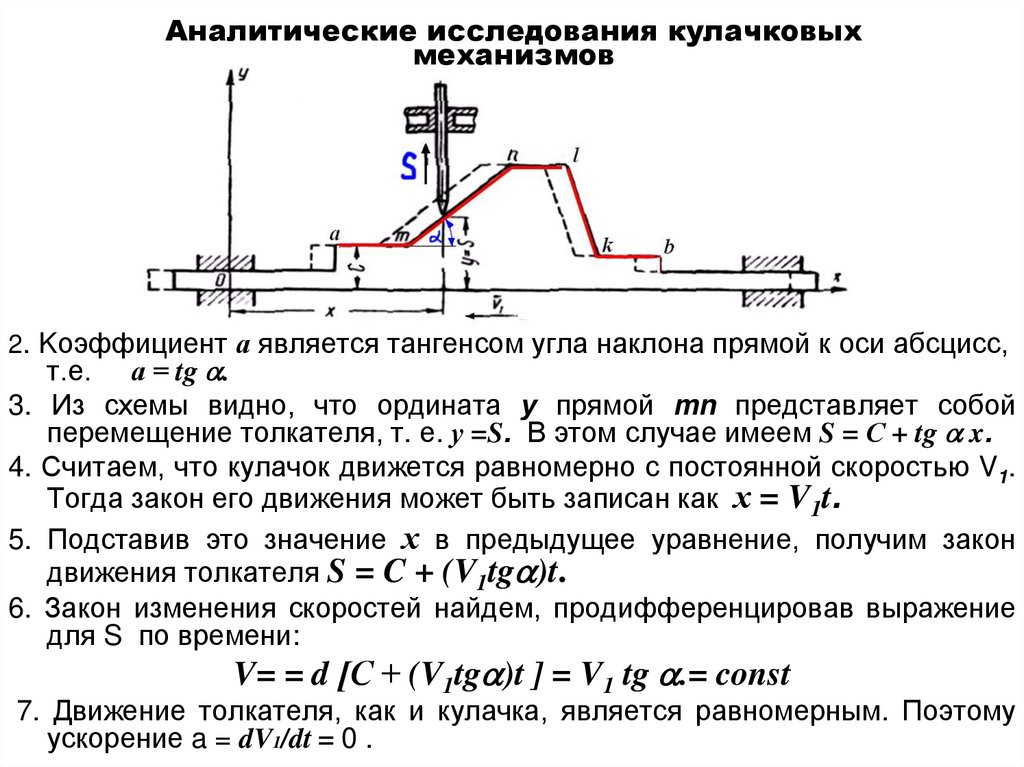
14. Аналитические исследования кулачковых механизмов
На рис. показан поступательно движущийся кулачок спрофилем, ограниченным прямыми линиями. В этом
случае исследование несколько упрощается, так как
ордината профиля кулачка представляет собой
искомое перемещение толкателя.
1.Участок подъема профиля кулачка представляет
собой прямую тn, уравнение которой у=С+ах.
15.
Аналитические исследования кулачковыхмеханизмов
2. Kоэффициент а является тангенсом угла наклона прямой к оси абсцисс,
т.е. а = tg .
3. Из схемы видно, что ордината у прямой mn представляет собой
перемещение толкателя, т. е. у =S. В этом случае имеем S = С + tg x.
4. Считаем, что кулачок движется равномерно с постоянной скоростью V1.
Тогда закон его движения может быть записан как х = V1t.
5. Подставив это значение х в предыдущее уравнение, получим закон
движения толкателя S = C + (V1tg )t.
6. Закон изменения скоростей найдем, продифференцировав выражение
для S по времени:
V= = d [С + (V1tg )t ] = V1 tg .= const
7. Движение толкателя, как и кулачка, является равномерным. Поэтому
ускорение a = dV1/dt = 0 .
16.
А)Б)
В)
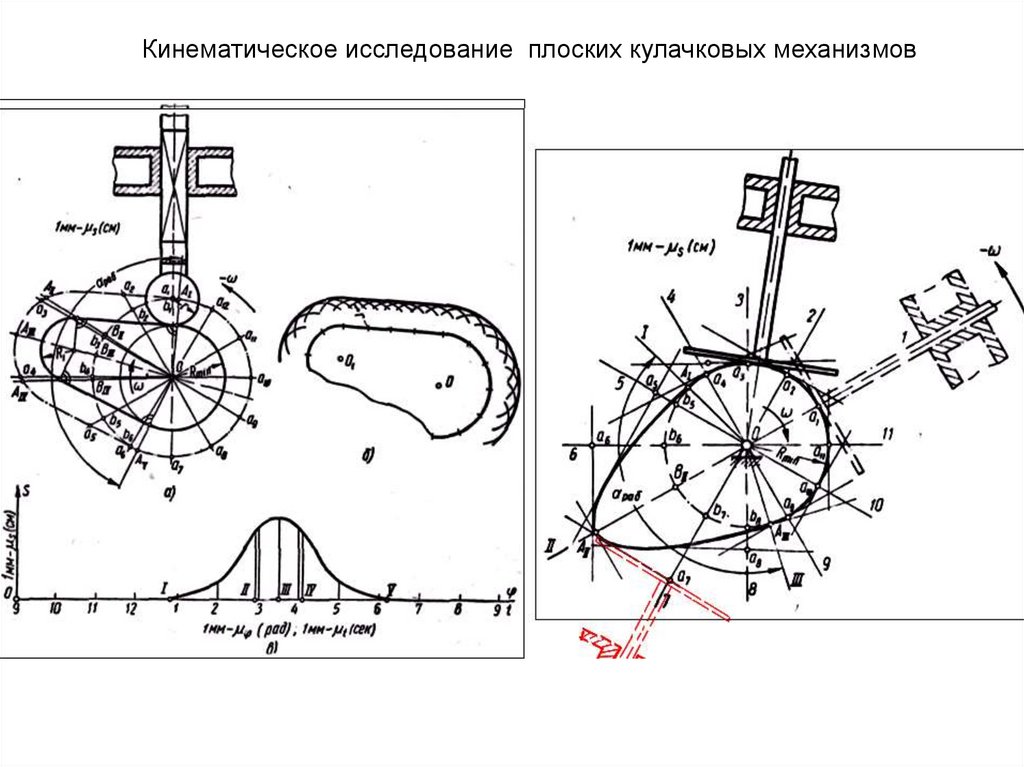
17. Кинематическое исследование плоских кулачковых механизмов
Дляпостроения
графика
перемещений
толкателя
используем
метод
обращенного движения. Этот метод
заключается в том, что кулачковому
механизму мысленно сообщают вращение
в сторону, противоположную вращению
кулачка со скоростью движения кулачка ω.
При этом кулачок как бы останавливается,
а неподвижные направляющие толкателя
вместе с толкателем начинают вращаться
вокруг неподвижного кулачка. При каждом
угловом положении определяют перемещение
S. (легко выполнять в АВТОКАДе)
18.
Кинематическое исследование плоских кулачковых механизмов19. Исследование скоростей и ускорений методом графического дифференцирования
20. Исследование кулачка (для самостоятельной работы)
21. ПРОБЛЕМЫ ПРОЕКТИРОВАНИЯ ПЛОСКИХ КУЛАЧКОВЫХ МЕХАНИЗМОВ
Проектированиекулачкового
механизма
заключается
в
определении основных размеров механизма и построении
профиля кулачка. Обе эти задачи решаются совместно.
Задача построения профиля кулачка или профилирования
является обратной задаче кинематического исследования.
АНАЛИЗ. При кинематическом исследовании по заданному
профилю кулачка строят графики s, v , a толкателя.
СИНТЕЗ. При профилировании наоборот, по заданному закону
движения толкателя s = f(t) строят, например, методом
обращенного движения соответствующий ему профиль кулачка.
Задача проектирования или синтеза кулачковых механизмов,
как и задача их анализа, может быть решена как графически,
так и аналитически.
Аналитический метод синтеза дает более точные результаты, но
он применим лишь к кулачковым механизмам, имеющим
кулачки с наиболее простыми профилями. (ПМО для ЭВМ).
Кулачковые механизмы, применяемые в приборостроении, как
правило, не имеют больших движущихся масс, скоростей и
ускорений, поэтому точность графического решения вполне
достаточна.
22. ПРОБЛЕМЫ ПРОЕКТИРОВАНИЯ ПЛОСКИХ КУЛАЧКОВЫХ МЕХАНИЗМОВ первого и второго видов
Очень часто при проектировании кулачковыхмеханизмов задается лишь ход толкателя
т. е. его максимальное отклонение из
низшего положения. В этом случае закон
движения толкателя не задается и его
можно взять произвольным. (мех-зм 2
вида)
(существуют рекомендации по выбору
профилей
спираль
Архимеда,
логарифмические
спирали,
тригономет.функции и т.д.)
При
выборе
закона
движения
необходимо учитывать динамические
условия
работы
толкателя
и
долговечность механизма .
23.
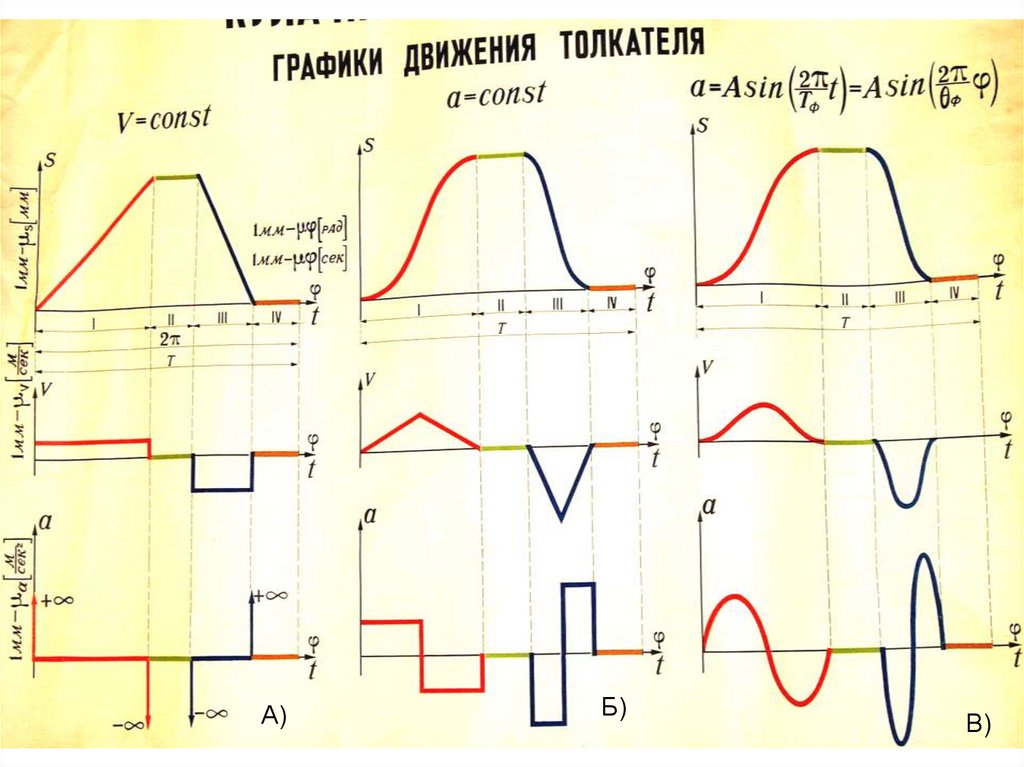
Все виды законов движения толкателя можно разделить натри группы.
законы
движения,
при
которых
толкатель движется с жесткими ударами;
2) законы движения, при которых толкатель
движется с мягкими ударами;
3)
законы движения, при которых толкатель
движется без ударов.
1)
В точках изменения направления движения возникают большие
ускорения, которые вызывают сильные или, как их называют,
жесткие удары, отрицательно влияющие на работу
механизма.
Режим с жесткими ударами можно рекомендовать лишь для
тихоходных кулачковых механизмов, имеющих незначительный
вес толкателя и связанных с ним движущихся деталей.
Если жесткие удары в проектируемом кулачковом
механизме не допустимы, кривая перемещений
толкателя строится из ветвей квадратных,
кубических парабол и тригонометрич. функций,
что соответствует равнопеременному закону
движения.
24. выбор закона движения с учетом динамических условий работы толкателя и долговечности механизма .
параболыКуб. параболы,
тригонометрические
25.
О ТОЧНОСТИ КУЛАЧКОВЫХ МЕХАНИЗМОВТочность кулачкового механизма характеризуется
погрешностями изготовления, сборки, повреждениями
. На рис. а показан профиль кулачка, полученный с
погрешностями изготовления; значение р является
отступлением от значения ординаты или радиуса-вектора
кулачка от расчетного значения.
• На рис. б показан перекос толкателя вследствие зазора
в направляющих и смещение конца толкателя на С. На
рис. в показано смещение оси толкателя относительно
полюса кулачка на величину с. На рис. г показан
эксцентриситет кулачка е и эксцентриситет ролика Р.