

 industry
industrySimilar presentations:










Знакомство с системой телеуправления Омегабот
1.
Всероссийский проект «Кадры для цифровой промышленности. Создание законченныхпроектно-конструкторских решений в режиме соревнований «Кибердром.2023»
Знакомство с системой телеуправления
Омегабот.
2.
Изучаемые вопросы1. Изучение визуального интерфейса системы телеуправления.
2. Знакомство со схемой управления роботом.
3. Подключение и отключение к роботу.
Всероссийский проект «Кадры для цифровой промышленности. Создание законченных проектно-конструкторских
решений в режиме соревнований «Кибердром.2023»
2
3.
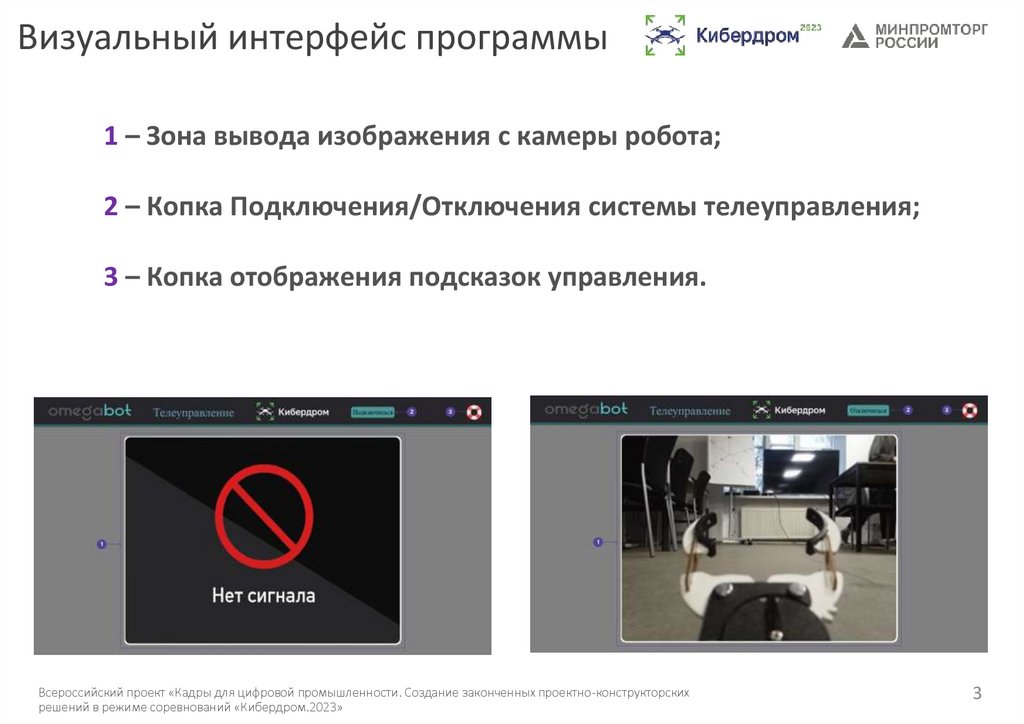
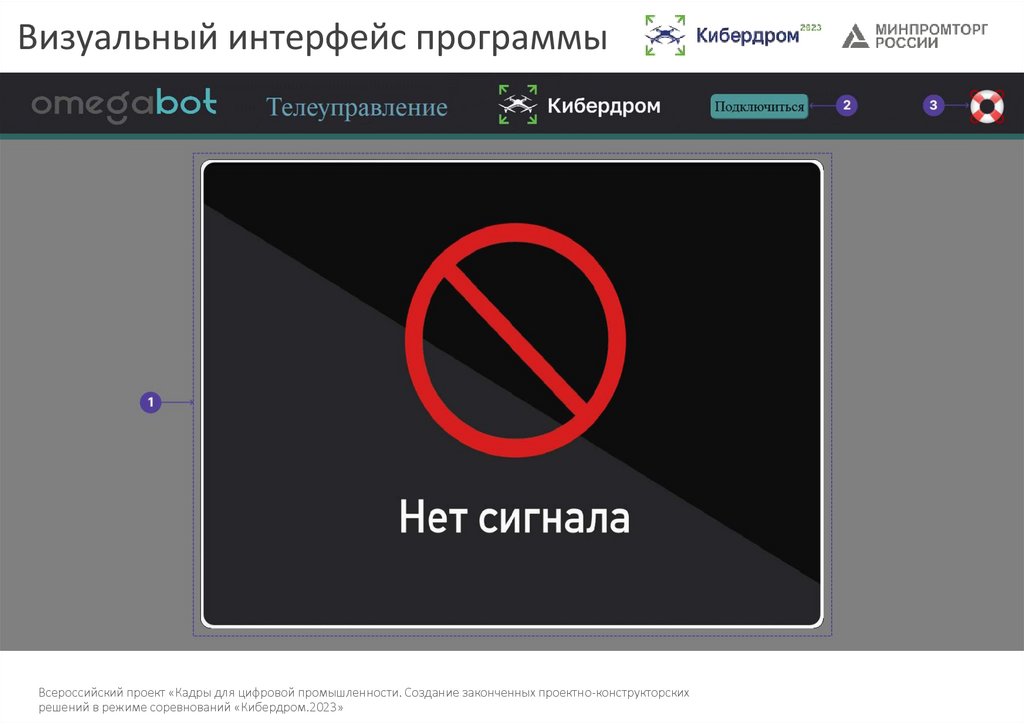
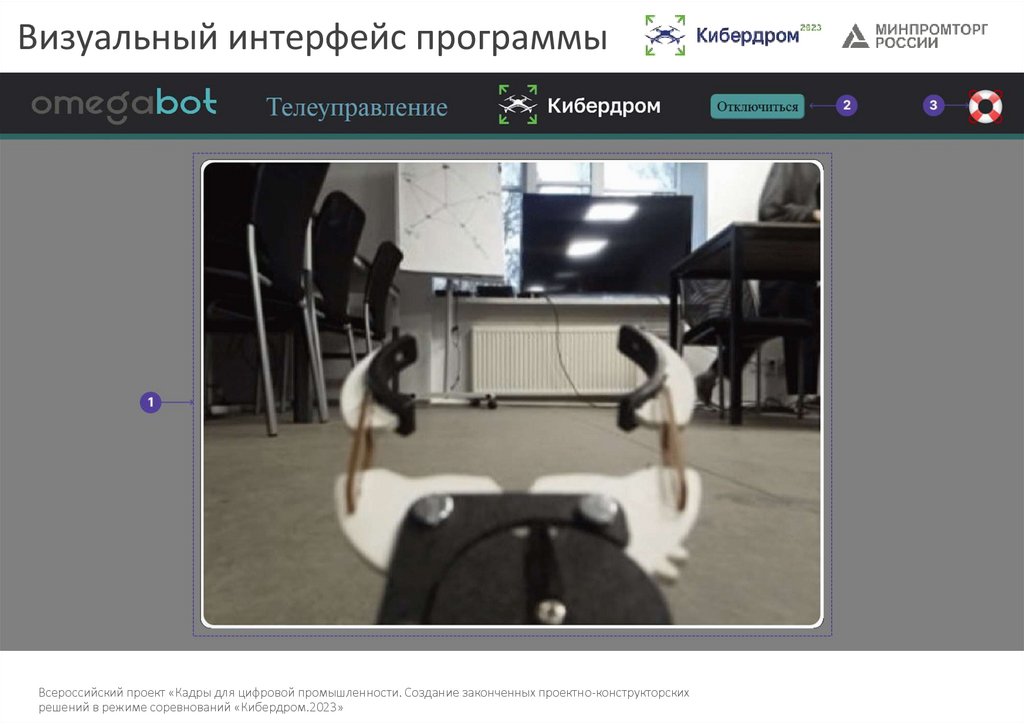
Визуальный интерфейс программы1 – Зона вывода изображения с камеры робота;
2 – Копка Подключения/Отключения системы телеуправления;
3 – Копка отображения подсказок управления.
Всероссийский проект «Кадры для цифровой промышленности. Создание законченных проектно-конструкторских
решений в режиме соревнований «Кибердром.2023»
3
4.
Визуальный интерфейс программыВсероссийский проект «Кадры для цифровой промышленности. Создание законченных проектно-конструкторских
решений в режиме соревнований «Кибердром.2023»
5.
Визуальный интерфейс программыВсероссийский проект «Кадры для цифровой промышленности. Создание законченных проектно-конструкторских
решений в режиме соревнований «Кибердром.2023»
6.
Организация работы1 – Система телеуправления устанавливается на персональный
компьютер выделенный организаторами для запуска и использования
системы телеуправления;
2 – Подключение к управлению робота производится путём нажатия
кнопки ‘’Подключиться’’ в визуальном интерфейсе программы;
3 – Отключение от управления производится путём нажатия кнопки
‘’Отключиться’’ в визуальном интерфейсе программы;
4 – Управление роботом производится нажатием клавиш на
клавиатуре, согласно установленной раскладке управления.
Всероссийский проект «Кадры для цифровой промышленности. Создание законченных проектно-конструкторских
решений в режиме соревнований «Кибердром.2023»
6
7.
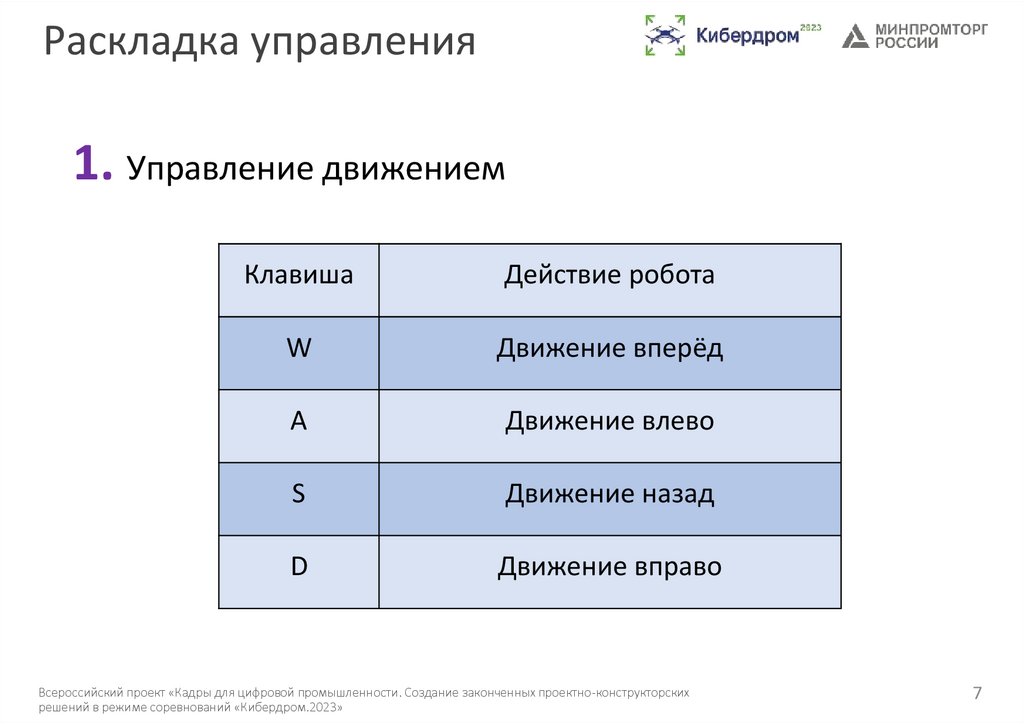
Раскладка управления1. Управление движением
Клавиша
Действие робота
W
Движение вперёд
A
Движение влево
S
Движение назад
D
Движение вправо
Всероссийский проект «Кадры для цифровой промышленности. Создание законченных проектно-конструкторских
решений в режиме соревнований «Кибердром.2023»
7
8.
Раскладка управления2. Управление камерой и скоростью
Клавиша
Действие робота
K
Вертикальное движение камеры вниз
J
Уменьшить скорость робота
L
Увеличить скорость робота
I
Вертикальное движение камеры вверх
Всероссийский проект «Кадры для цифровой промышленности. Создание законченных проектно-конструкторских
решений в режиме соревнований «Кибердром.2023»
8
9.
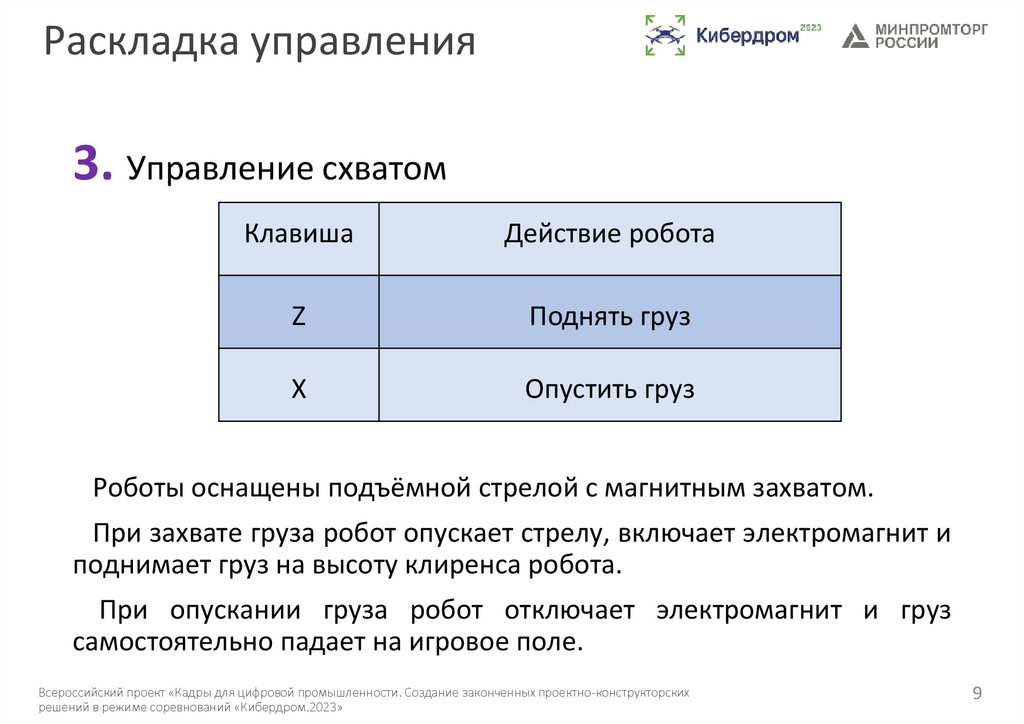
Раскладка управления3. Управление схватом
Клавиша
Действие робота
Z
Поднять груз
X
Опустить груз
Роботы оснащены подъёмной стрелой с магнитным захватом.
При захвате груза робот опускает стрелу, включает электромагнит и
поднимает груз на высоту клиренса робота.
При опускании груза робот отключает электромагнит и груз
самостоятельно падает на игровое поле.
Всероссийский проект «Кадры для цифровой промышленности. Создание законченных проектно-конструкторских
решений в режиме соревнований «Кибердром.2023»
9