





 mathematics
mathematicsSimilar presentations:










Тригонометрия как основа навигационных алгоритмов в робототехнике
1.
ТРИГОНОМЕТРИЯ КАК ОСНОВАНАВИГАЦИОННЫХ
АЛГОРИТМОВ В
РОБОТОТЕХНИКЕ
Выполнили: Мызникова Е.А., Марковская М.В.
Группа МР-9-24
2.
Введение■ ЦЕЛЬ : определить значение тригонометрии в
навигационных алгоритмах в робототехнике
■ ЗАДАЧИ : 1. Изучить материал по теме;
2. Рассмотреть аспекты использования
тригонометрии в робототехнике;
3. Сделать выводы на основе изученной
информации;
4. Подготовить задачу по заданной теме.
3.
Вступление4.
Принципы тригонометрии в навигации1. Определение положения
■ Триангуляция - определение взаимного расположения
точек на поверхности при помощи построения сети
треугольников.
5.
2. Построение маршрутов6.
3. Интерпретация данных сенсоров7.
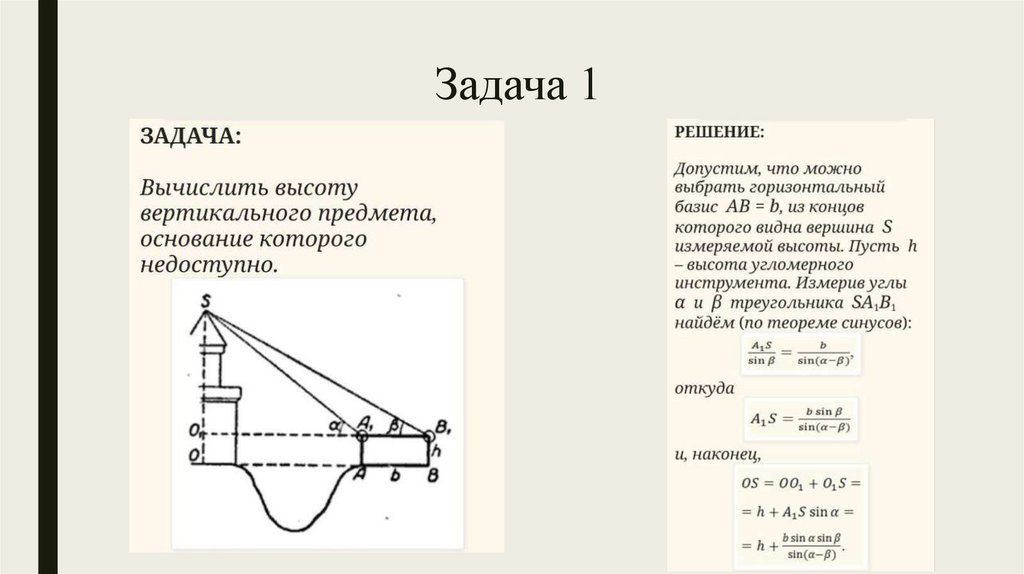
Задача 18.
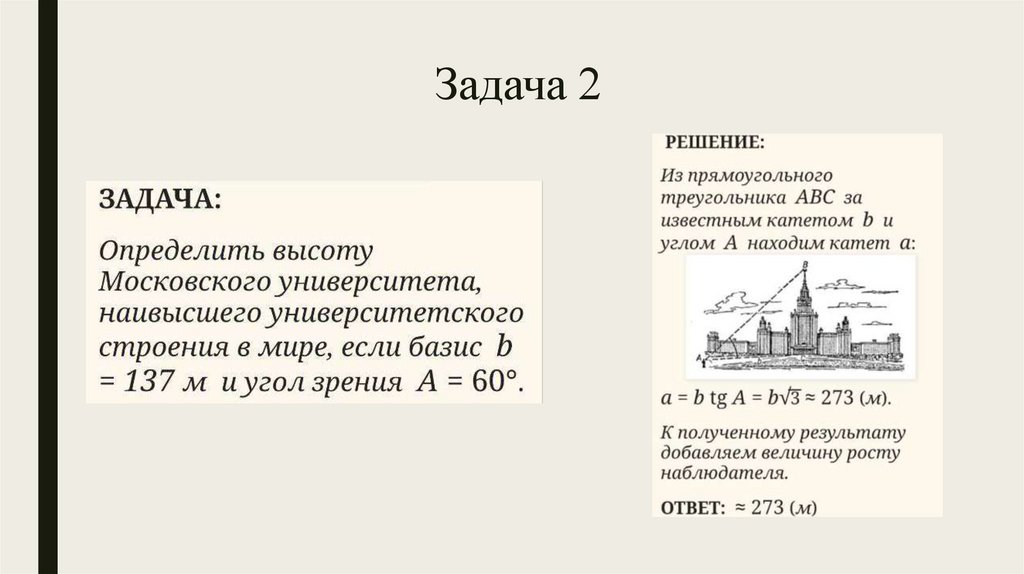
Задача 29.
Итоги10.
Список используемой литературы■ https://dic.academic.ru/dic.nsf/ushakov/1058426
■ https://begemot.ai/projects/2182754-primenenie-trigonometriiv-mobilnoi-robototexnike
■ https://sowa-ru.com/wpcontent/uploads/2020/09/lobova_ai_mht.b-61_2020_nir.pdf