 warfare
warfareSimilar presentations:


")



")



Двумерная линейная регрессионная модель зависимости количества освоенных курсантами тем от времени проведенных занятий
1.
Краснодарское высшее военное авиационное училище летчиковДля служебного пользования
XV конференция ВНОК
«Актуальные вопросы развития авиационной науки и техники»
Секция № 4
«Перспективы развития авиадвигателестроения и самолетостроения в России»
Доклад на тему:
«Двумерная линейная регрессионная модель зависимости
количества освоенных курсантами тем от времени проведенных
занятий»
Выполнил: к-т Леканов И.Д.
Руководитель: к.ф-м.н., доцент гп Астафьев Е.Р.
г. Краснодар
2.
АКТУАЛЬНОСТЬ2
ДСП
Современные методы работы в настоящее время требуют использования
математических методов и построений соответствующих моделей на основе
недостаточного количества информации об исходных данных. Анализ такой
информации требует специальных статистических методов, а их применение
для
построения
математических
моделей
позволяет
описать
и
спрогнозировать реальные процессы.
Рассмотрим зависимость количества освоенных курсантами тем от времени
проведенных занятий по изучаемой дисциплине. Выявим линейную
взаимосвязь между рассматриваемыми переменными, если такая
существует.
3.
МЕТОДОЛОГИЧЕСКИЕ ХАРАКТЕРИСТИКИ3
ДСП
Цель:
построение математической модели зависимости изученных тем от
проведенного на занятиях времени
Объект:
курсанты
Предмет:
параметры движения летательного аппарата
Задача:
1. Нахождение
2. Формирование и развитие у курсантов умений и навыков по применению
знаний в решении прикладных задач
4.
ЧАСТНЫЕ ЗАДАЧИ4
ДСП
1. Провести анализ требований при разработке рекомендаций летчику по
действиям при отказе силовой установки
2.Разработать алгоритм захода на посадку летательного аппарата по
функционалу дальности при выполнении ограничений на конце траектории
(скорость планирования на конце траектории равна посадочной скорости)
3.Разработать подпрограмму определения рациональных параметров
траекторий движения летательного аппарата при отказе силовой установки
5.
5ПОСТАНОВКА ЗАДАЧИ В МАТЕМАТИЧЕСКОМ ВИДЕ
ДСП
Расчет
Поиск рациональной траектории движения
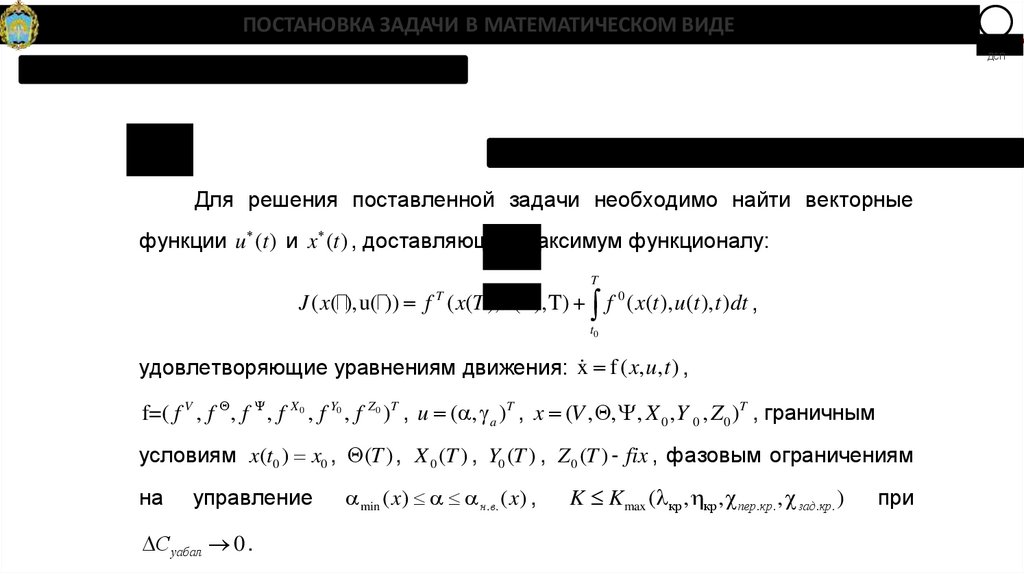
Для решения поставленной задачи необходимо найти векторные
функции u (t ) и x (t ) , доставляющие максимум функционалу:
T
J ( x( ),u( )) f ( x(T ), u (T),T) f 0 ( x(t ), u (t ), t )dt ,
T
t0
удовлетворяющие уравнениям движения: x f ( x, u, t ) ,
f=( f V , f , f , f X 0 , f Y0 , f Z0 )T , u ( , a )T , x (V , , , X 0 , Y 0 , Z0 )T , граничным
условиям x(t0 ) x0 , (T ) , X 0 (T ) , Y0 (T ) , Z 0 (T ) - fix , фазовым ограничениям
на
управление
С уaбал 0 .
min ( x) н.в. ( x) ,
K K max ( кр , кр , пер.кр. , зад.кр. )
при
6.
6ВИХРЕВЫЕ СХЕМЫ, РЕЗУЛЬТАТЫ АЭРОДИНАМИЧЕСКОГО РАСЧЕТА
ДСП
4
1
2
0
0
0 2 4 6 8 10 12 14 16 18 20 22
0 2 4 6 8 10 12 14 16 18 20 22
1
2
3
4
5
1
6
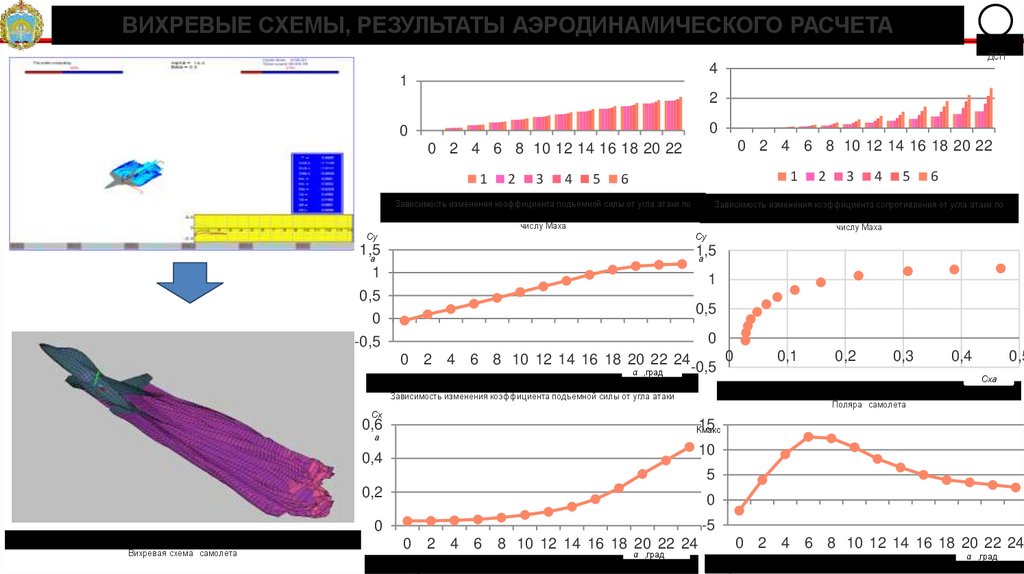
Зависимость изменения коэффициента подъемной силы от угла атаки по
2
3
4
5
6
Зависимость изменения коэффициента сопротивления от угла атаки по
числу Маха
числу Маха
Су
Су
1,5
а
1,5
а
1
1
0,5
0,5
0
0
-0,5
0 2 4 6 8 10 12 14 16 18 20 22 24
α ,град
-0,5
Зависимость изменения коэффициента подъемной силы от угла атаки
0,1
0,2
0,3
0,4
0,5
Сха
Поляра самолета
Сх
0,6
0
15
Кмакс
а
10
0,4
5
0,2
0
-5
0
Вихревая схема самолета
0
2
4
6
8 10 12 14 16 18 20 22 α24
α ,град
0 2 4 6 8 10 12 14 16 18 20 22 24
α ,град
7.
7ВЫБОР МЕТОДА РЕШЕНИЯ ЗАДАЧИ , МАТ. ФОРМУЛИРОВКА ЗАДАЧИ
ДСП
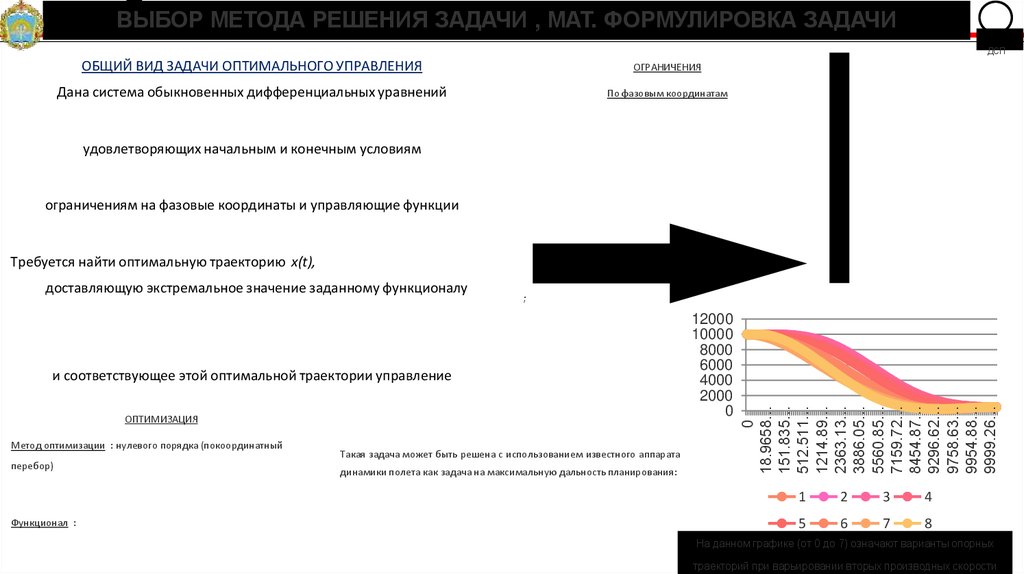
ОБЩИЙ ВИД ЗАДАЧИ ОПТИМАЛЬНОГО УПРАВЛЕНИЯ
ОГРАНИЧЕНИЯ
Дана система обыкновенных дифференциальных уравнений
По фазовым координатам
удовлетворяющих начальным и конечным условиям
ограничениям на фазовые координаты и управляющие функции
Требуется найти оптимальную траекторию x(t),
Переход
к безразмерной
величине
По управляющим
функциям
;
и соответствующее этой оптимальной траектории управление
ОПТИМИЗАЦИЯ
Метод оптимизации : нулевого порядка (покоординатный
перебор)
Функционал :
Такая задача может быть решена с использованием известного аппарата
динамики полета как задача на максимальную дальность планирования:
12000
10000
8000
6000
4000
2000
0
0
18.9658…
151.835…
512.511…
1214.89…
2363.13…
3886.05…
5560.85…
7159.72…
8454.87…
9296.62…
9758.63…
9954.88…
9999.26…
доставляющую экстремальное значение заданному функционалу
1
2
3
4
5
6
7
8
На данном графике (от 0 до 7) означают варианты опорных
траекторий при варьировании вторых производных скорости
8.
8РЕЗУЛЬТАТЫ РАСЧЕТОВ ПРЯМЫМ ВАРИАЦИОННЫМ МЕТОДОМ
ДСП
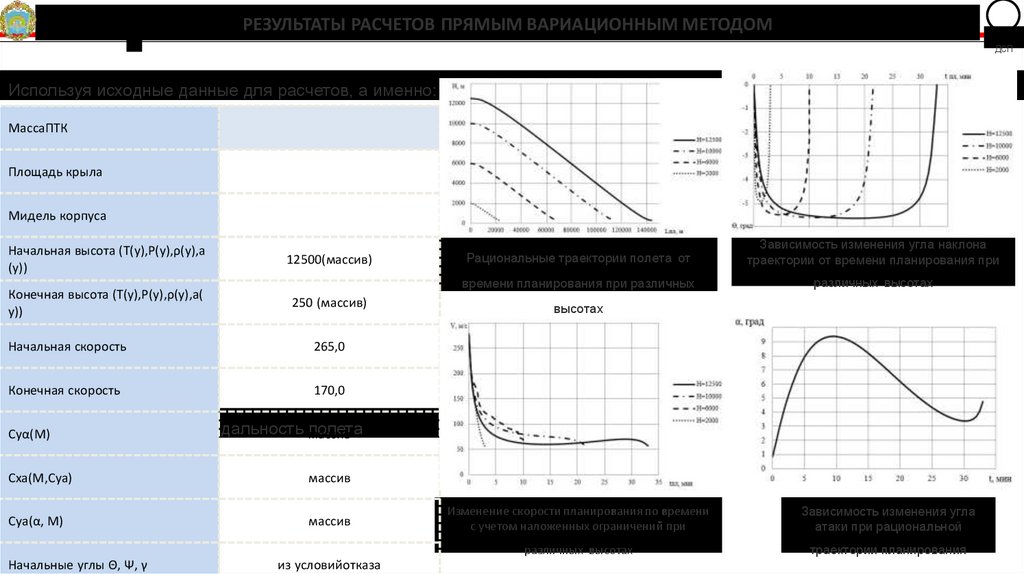
Используя исходные данные для расчетов, а именно:
МассаПТК
Площадь крыла
Мидель корпуса
Начальная высота (Т(у),Р(у),ρ(у),а
(у))
Конечная высота (Т(у),Р(у),ρ(у),а(
у))
12500(массив)
250 (массив)
Начальная скорость
265,0
Конечная скорость
170,0
Рациональные траектории полета от
Зависимость изменения угла наклона
траектории от времени планирования при
времени планирования при различных
различных высотах
высотах
иСуα(М)
в качестве функционала дальность полета
массив
Сха(М,Суа)
массив
Суа(α, М)
массив
Начальные углы Θ, Ψ, γ
из условийотказа
Изменение скорости планирования по времени
с учетом наложенных ограничений при
Зависимость изменения угла
атаки при рациональной
различных высотах
траектории планирования
9.
ВЫВОДЫ9
ДСП
1. Проведен анализ требований при разработке рекомендаций летчику по
действиям при отказе силовой установки
2.Разработан алгоритм захода на посадку летательного аппарата по
функционалу дальности при выполнении ограничений на конце траектории
(скорость планирования на конце траектории равна посадочной скорости)
3.Разработана подпрограмма определения рациональных параметров
траекторий движения летательного аппарата при отказе силовой установки
для реализации системы интеллектуальной поддержки летчика
10.
Краснодарское высшее военное авиационное училище летчиковДоклад закончен!
г. Краснодар – 2025 г.