

























 physics
physics electronics
electronics warfare
warfareSimilar presentations:










Принципы и методы радиолокации. (Тема 1)
1.
рТема 1.
ОСНОВНЫЕ ПРИНЦИПЫ И
МЕТОДЫ РАДИОЛОКАЦИИ
№№
занятий
Наименование занятий
1
2
Задачи курса и общие сведения о радиолокации.
Дальность действия радиолокационной станции в
свободном пространстве.
Импульсный метод радиолокации.
Когерентно – импульсный метод радиолокации.
Методы обзора пространства, определение
угловых координат и высоты.
Основные тактико – технические характеристики
импульсных РЛС и требования, предъявляемые к
ним.
3
4
5
6
Слайд № 1
Время
(час)
2
2
2
2
2
2
2.
Слайд № 2Тема 1.
ОСНОВНЫЕ ПРИНЦИПЫ И
МЕТОДЫ РАДИОЛОКАЦИИ
ЗАДАЧИ КУРСА И
ОБЩИЕ СВЕДЕНИЯ О РАДИОЛОКАЦИИ
Занятие 1.
Вопросы занятия.
1. Задачи курса и основные определения
радиолокации.
2. Краткая история развития отечественной
радиолокации.
3. Основные принципы радиолокации.
4. Виды радиолокации, классификация РЛС,
области применения радиолокации.
3.
Слайд № 3ОСНОВНЫЕ ОПРЕДЕЛЕНИЯ РАДИОЛОКАЦИИ
РАДИОЛОКАЦИЯ –
область радиотехники, задачей которой является
обнаружение и распознавание различных объектов в
пространстве и определение их координат и
параметров движения с помощью радиоволн.
РАДИОЛОКАЦИОННАЯ ЦЕЛЬ –
объект радиолокации, т.е. материальный объект,
сведения о котором представляют практический
интерес:
- аэродинамические цели;
- баллистические или космические;
- наземные и надводные.
4.
Слайд № 4РАДИОЛОКАЦИОННАЯ ИНФОРМАЦИЯ (РЛИ) –
совокупность сведений о целях, полученных
средствами радиолокации.
РАДИОЛОКАЦИОННАЯ СТАНЦИЯ (РЛС) –
совокупность технических средств, используемых для
получения радиолокационной информации.
РАДИОЛОКАЦИОННЫЙ КОМПЛЕКС (РЛК) –
совокупность функционально связанных технических,
устройств, отдельных станций, обеспечивающих
получение полного состава радиолокационной
информации заданного качества.
5.
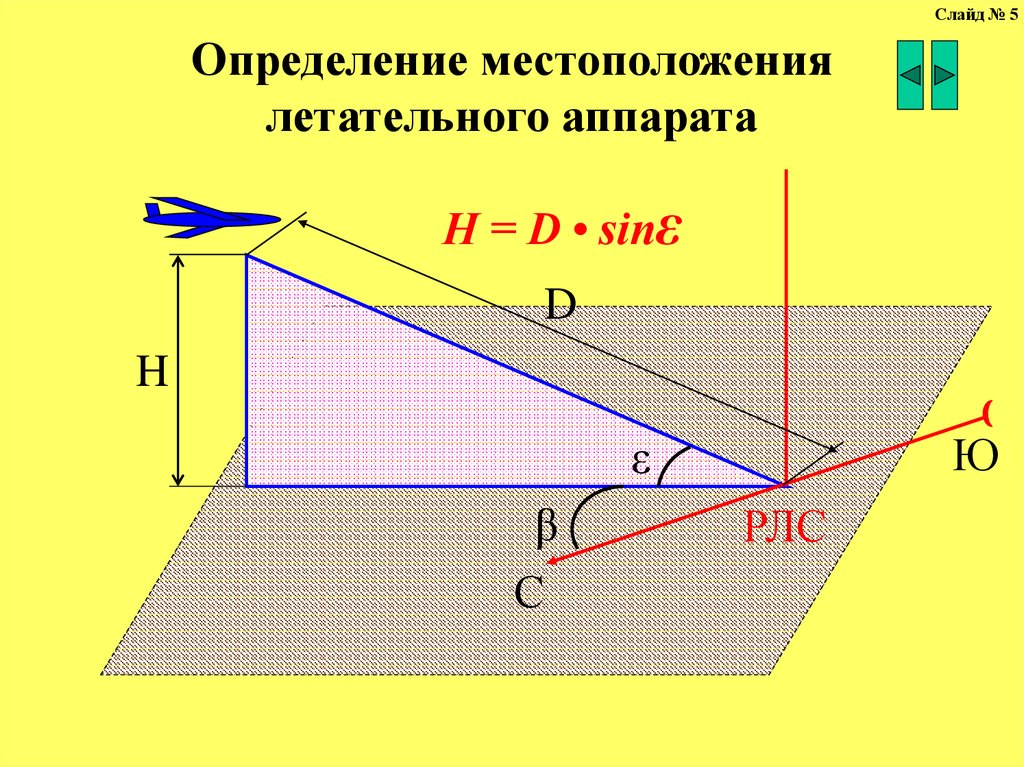
Слайд № 5Определение местоположения
летательного аппарата
H = D • sinε
D
H
Ю
ε
β
С
РЛС
6.
Слайд № 6ОСНОВНЫЕ ПРИНЦИПЫ РАДИОЛОКАЦИИ
ПЕРВЫЙ ПРИНЦИП РАДИОЛОКАЦИИ заключается
в том, что электромагнитные волны способны
отражаться от неоднородностей, встречающихся на
пути их распространения («вторичное излучение»).
ВТОРОЙ ПРИНЦИП РАДИОЛОКАЦИИ заключается
в том, что электромагнитные волны с помощью антенн
РЛС можно сконцентрировать в узкий луч.
ТРЕТИЙ ПРИНЦИП РАДИОЛОКАЦИИ заключается
в том, что электромагнитные волны распространяются
в пространстве прямолинейно и с постоянной
скоростью (3*108 м\с).
7.
Слайд № 7ОТРАЖЕНИЕ РАДИОВОЛН
А) Зеркальное
Б) Рассеянное
ά
β
l отр » РЛС
l отр РЛС
8.
Слайд № 8Вторичное излучение от цели
9.
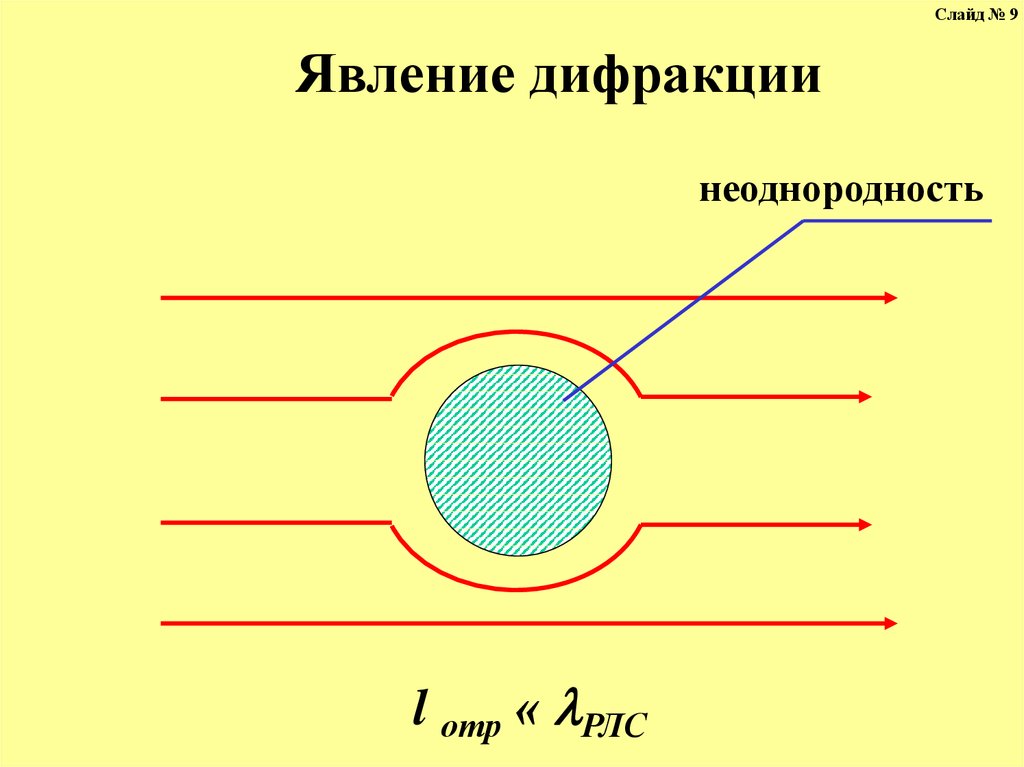
Слайд № 9Явление дифракции
неоднородность
l отр « РЛС
10.
Диаграммы направленности РЛСДальномер
H
Высотомер
έmax
H
H max
Θº0,5р
έmin
D
D
Вертикальная плоскость
С
С
φº
0,5р
Ю
Слайд № 10
Ю
φº
Горизонтальная плоскость
0,5р
11.
СлайдСлайд
№ 11 № 1
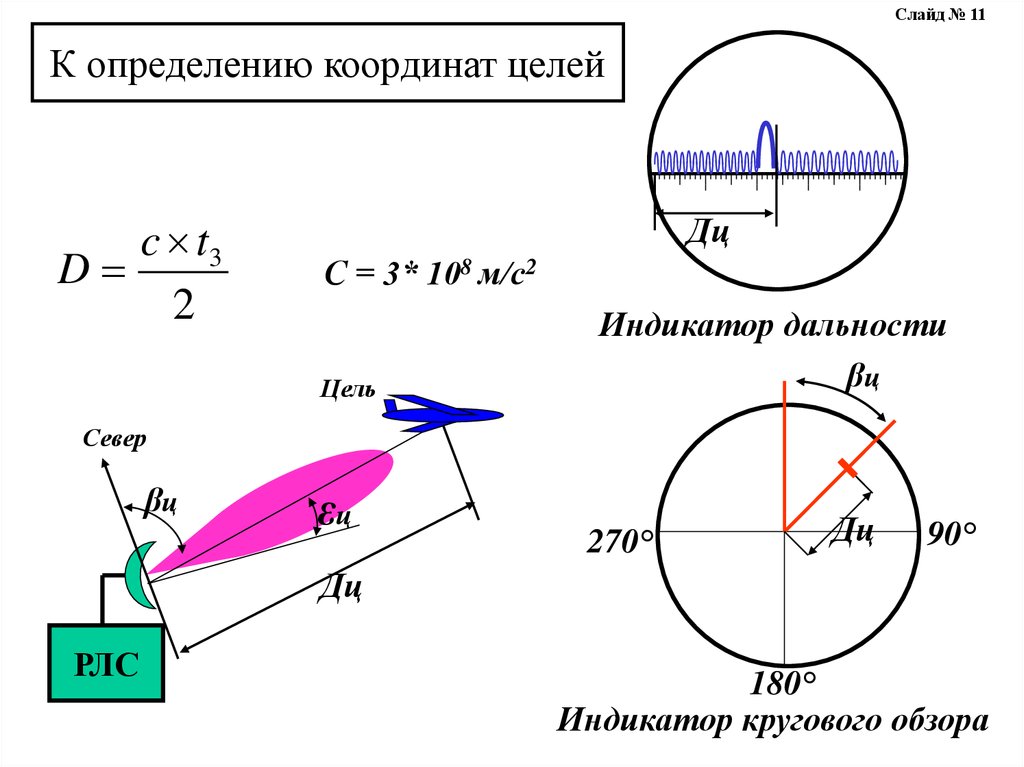
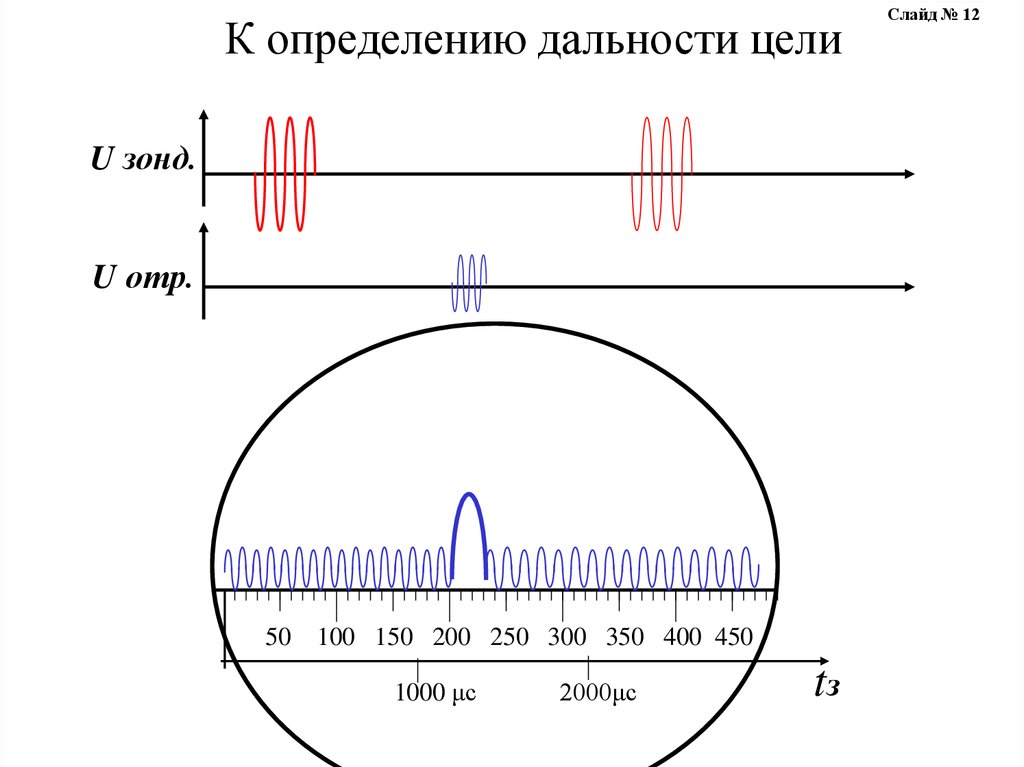
К определению координат целей
c t3
D
2
Дц
С = 3* 108 м/с2
Цель
Индикатор дальности
βц
Север
βц
εц
270°
Дц
90°
Дц
РЛС
180°
Индикатор кругового обзора
12.
К определению дальности целиU зонд.
U отр.
50 100 150 200 250 300 350 400 450
1000 μс
2000μс
tз
Слайд № 12
13.
Слайд № 13Активная радиолокация
Передатчик
А
Цель
Индикатор
Приемник
А
РЛС
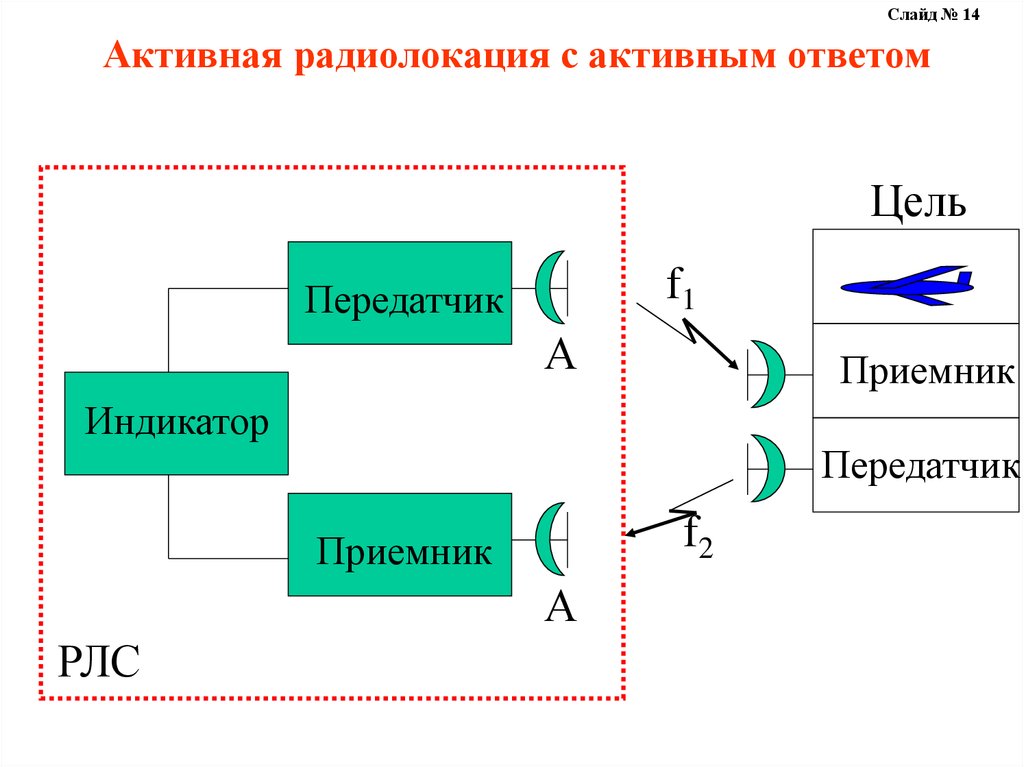
14.
Слайд № 14Активная радиолокация с активным ответом
Цель
f1
Передатчик
А
Приемник
Индикатор
Передатчик
f2
Приемник
А
РЛС
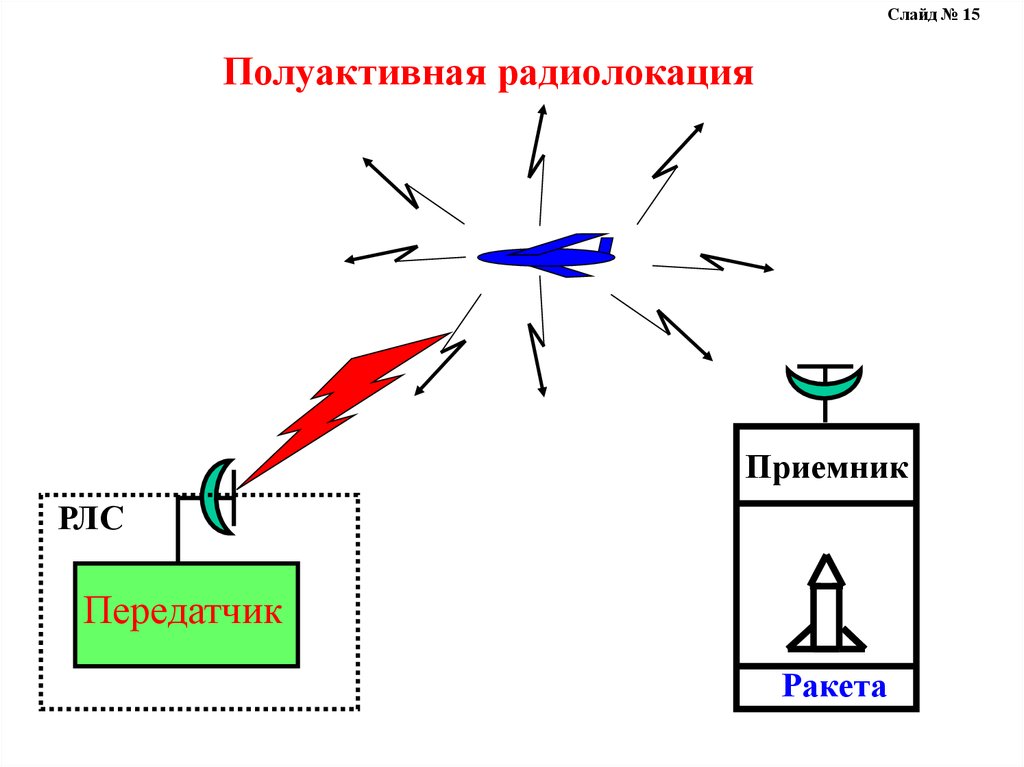
15.
Слайд № 15Полуактивная радиолокация
Приемник
РЛС
Передатчик
Ракета
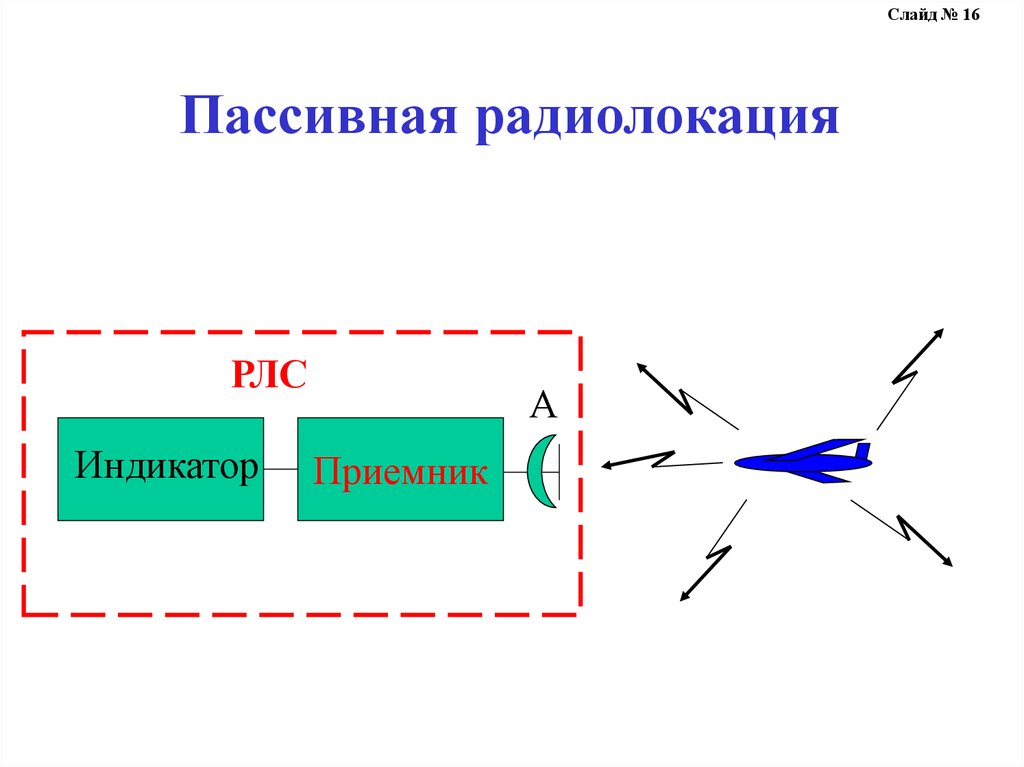
16.
Слайд № 16Пассивная радиолокация
РЛС
Индикатор
А
Приемник
17.
Слайд № 17Тема 1.
ОСНОВНЫЕ ПРИНЦИПЫ И
МЕТОДЫ РАДИОЛОКАЦИИ
ДАЛЬНОСТЬ ДЕЙСТВИЯ
РАДИОЛОКАЦИОННОЙ СТАНЦИИ
В СВОБОДНОМ ПРОСТРАНСТВЕ
Занятие 2.
Вопросы занятия.
1. Уравнение максимальной дальности
действия РЛС в свободном пространстве.
2. Предельная дальность прямой
радиовидимости.
3. Влияние Земли и атмосферы на дальность
действия РЛС.
18.
Слайд № 18К определению максимальной
дальности действий РЛС
Pи
Пц
4 Д 2
Pи G1
Пц
4 Д 2
Pomp
Pи G1
4 Д 2
Pи G1
Потр
4 Д 2 4 Д 2
Pи G1 Sа
Потр
4 Д 2 2
Д
О
РЛС
О1
Цель
Д 4
Д max 4
Pи G1 Sа
2
4 Pnp.
Pи G1 Sа
2
4 Pnp. min
19.
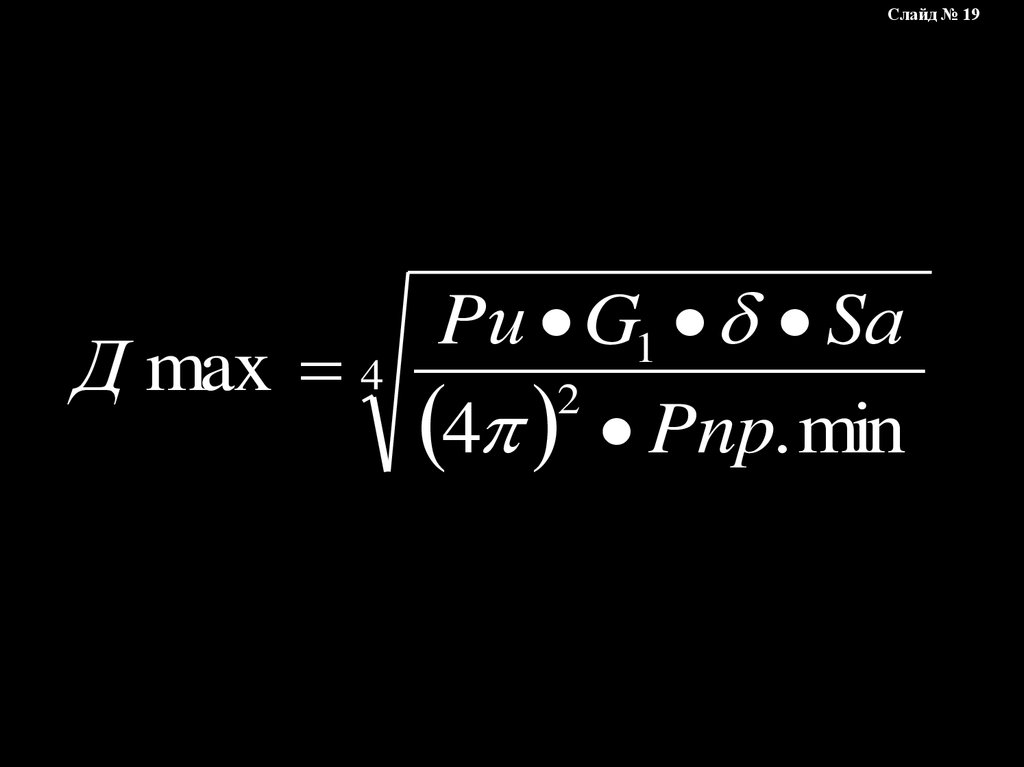
Слайд № 19Д max 4
Pи G1 Sа
2
4 Pnp. min
20.
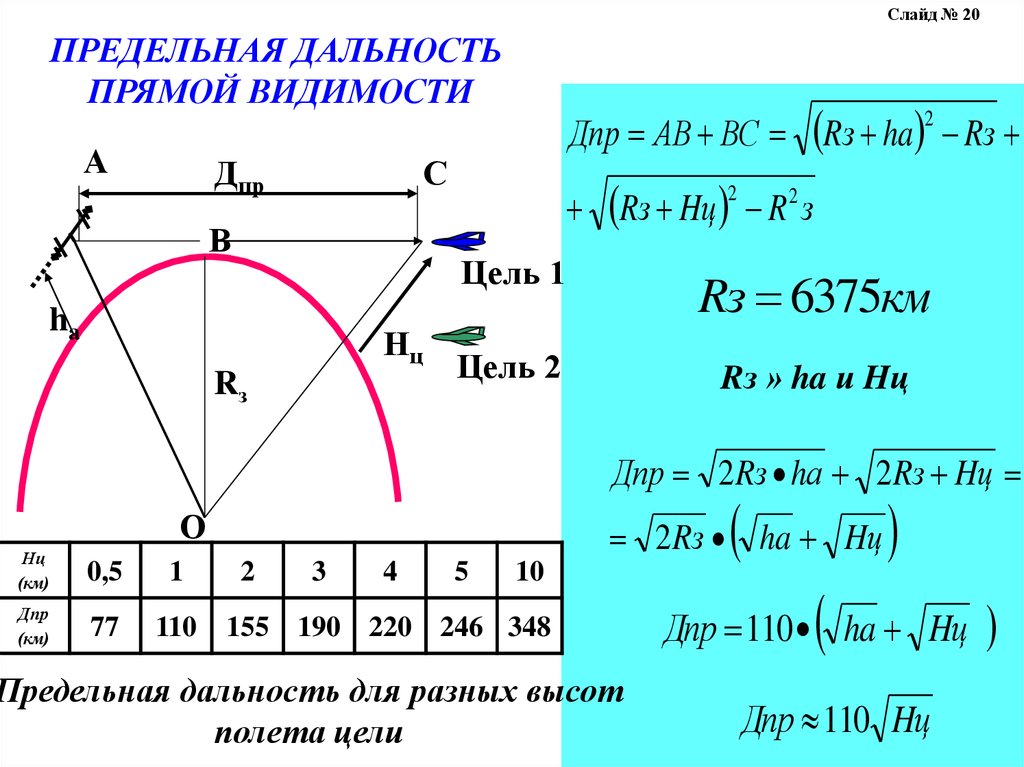
Слайд № 20ПРЕДЕЛЬНАЯ ДАЛЬНОСТЬ
ПРЯМОЙ ВИДИМОСТИ
А
Дпр
Дпр АВ ВС Rз ha Rз
2
С
В
ha
Нц
Rз
Rз Hц R 2 з
2
Цель 1
Rз 6375км
Цель 2
Rз » ha и Hц
Дпр 2 Rз hа 2 Rз Hц
О
Нц
(км)
0,5
1
Дпр
(км)
77
110
2 Rз ha Hц
2
3
4
5
10
155 190 220 246 348
Предельная дальность для разных высот
полета цели
Дпр 110 ha Hц
Дпр 110 Hц
21.
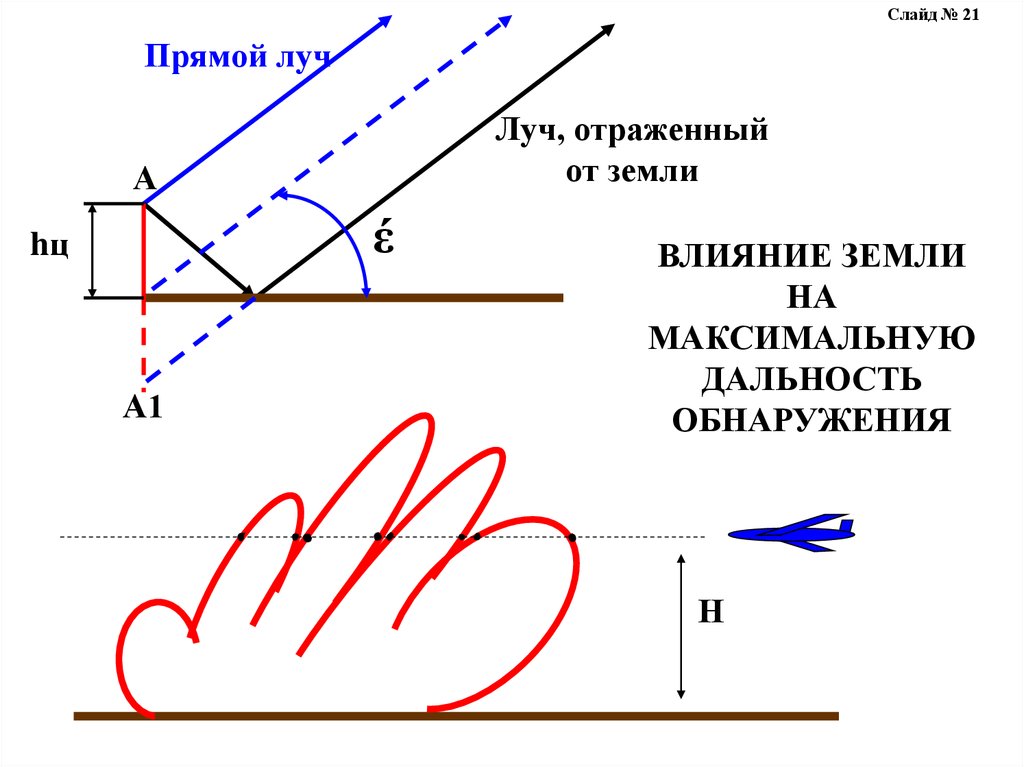
Слайд № 21Прямой луч
Луч, отраженный
от земли
А
έ
hц
А1
ВЛИЯНИЕ ЗЕМЛИ
НА
МАКСИМАЛЬНУЮ
ДАЛЬНОСТЬ
ОБНАРУЖЕНИЯ
Н
22.
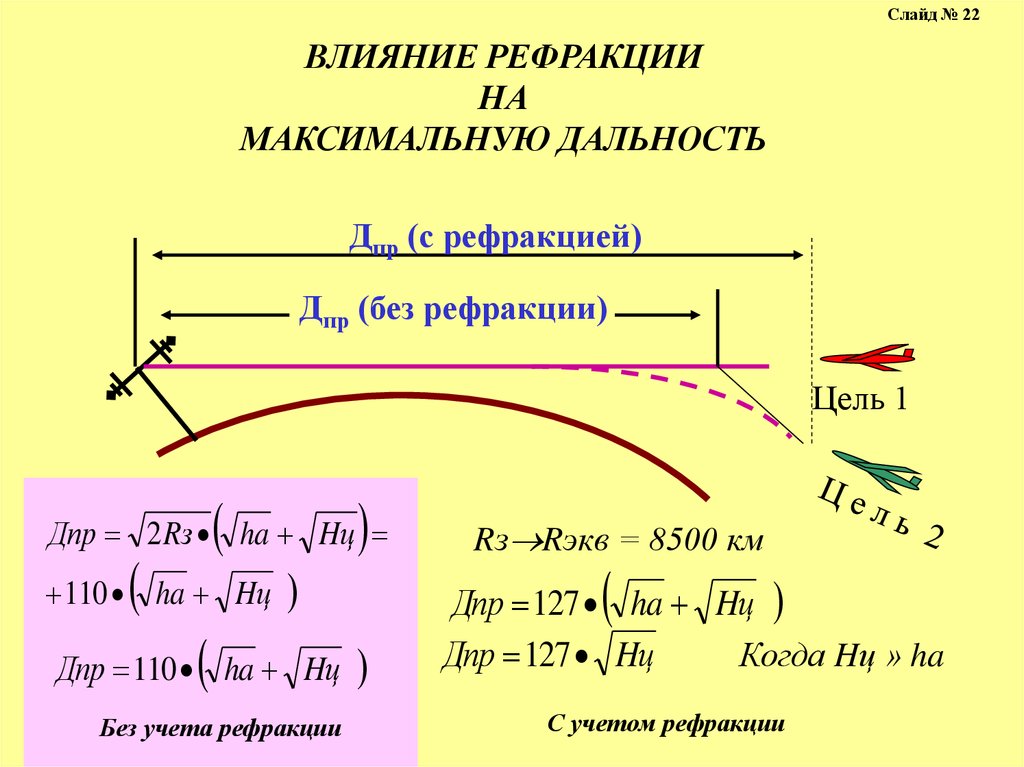
Слайд № 22ВЛИЯНИЕ РЕФРАКЦИИ
НА
МАКСИМАЛЬНУЮ ДАЛЬНОСТЬ
Дпр (с рефракцией)
Дпр (без рефракции)
Цель 1
Дпр 2 Rз ha Hц
110 ha Hц
Дпр 110 ha Hц
Без учета рефракции
Rз Rэкв = 8500 км
Дпр 127 ha Hц
Дпр 127 Hц
Когда Hц » ha
С учетом рефракции
23.
Слайд № 231- Без рефракции
2- Отрицательная рефракция
3 – Нормальная рефракция
4 – Повышенная рефракция
2
5 – Сверх рефракция
1
3
5
4
Различные случаи рефракции
24.
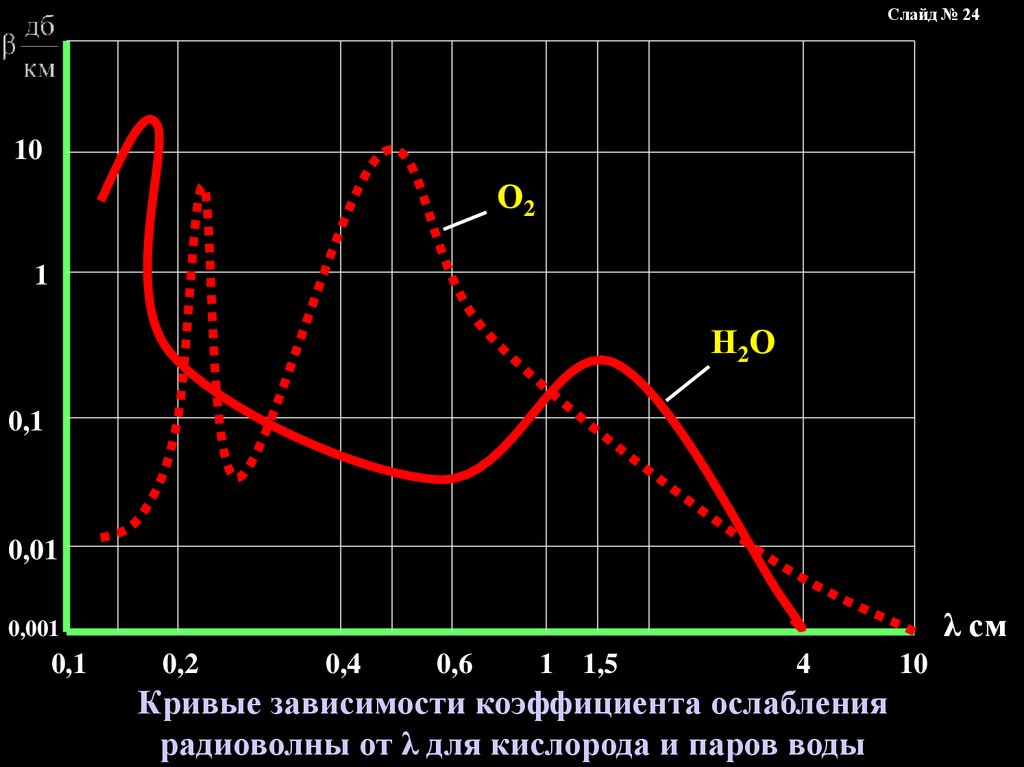
Слайд № 2410
О2
1
Н2О
0,1
0,01
λ см
0,001
0,1
0,2
0,4
0,6
1 1,5
4
Кривые зависимости коэффициента ослабления
радиоволны от λ для кислорода и паров воды
10
25.
Слайд № 25Тема 1.
ОСНОВНЫЕ ПРИНЦИПЫ И
МЕТОДЫ РАДИОЛОКАЦИИ
Занятие 3.
ИМПУЛЬСНЫЙ МЕТОД
РАДИОЛОКАЦИИ
Вопросы занятия.
1. Сущность импульсного метода
радиолокации и
_
структурная схема импульсной РЛС.
2. Основные показатели импульсного
метода.
3. Метод непрерывного излучения.
26.
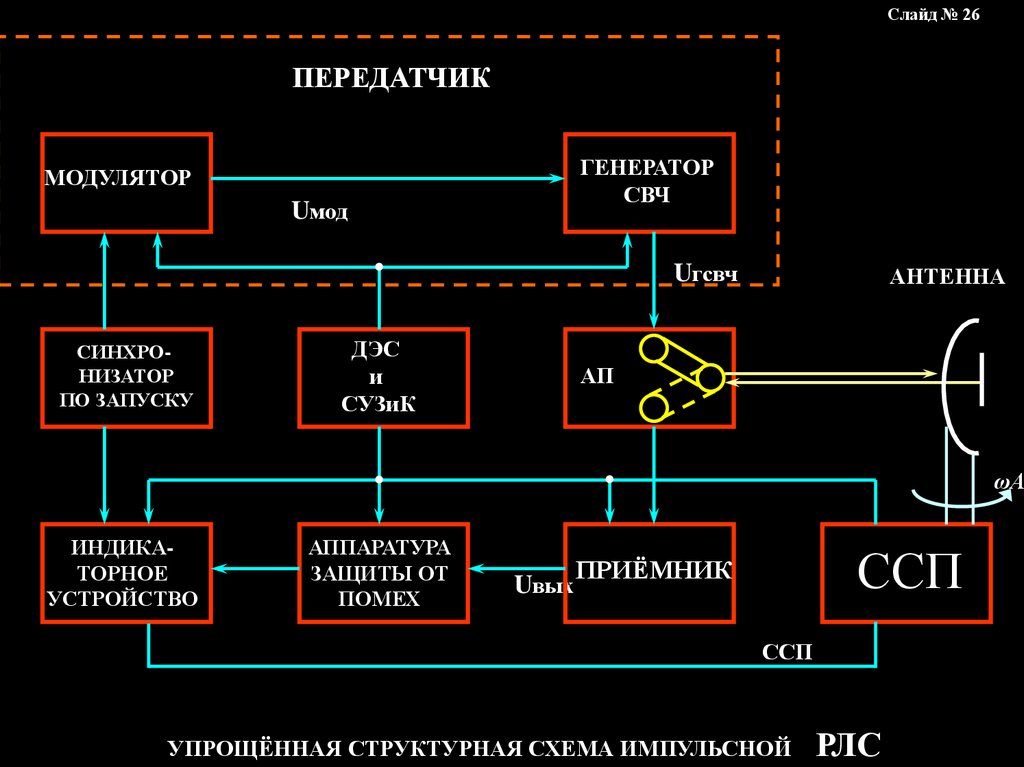
Слайд № 26ПЕРЕДАТЧИК
ГЕНЕРАТОР
СВЧ
МОДУЛЯТОР
Uмод
Uгсвч
СИНХРОНИЗАТОР
ПО ЗАПУСКУ
ДЭС
и
СУЗиК
АНТЕННА
АП
ωА
ИНДИКАТОРНОЕ
УСТРОЙСТВО
АППАРАТУРА
ЗАЩИТЫ ОТ
ПОМЕХ
Uвых
ССП
ПРИЁМНИК
ССП
УПРОЩЁННАЯ СТРУКТУРНАЯ СХЕМА ИМПУЛЬСНОЙ
РЛС
27.
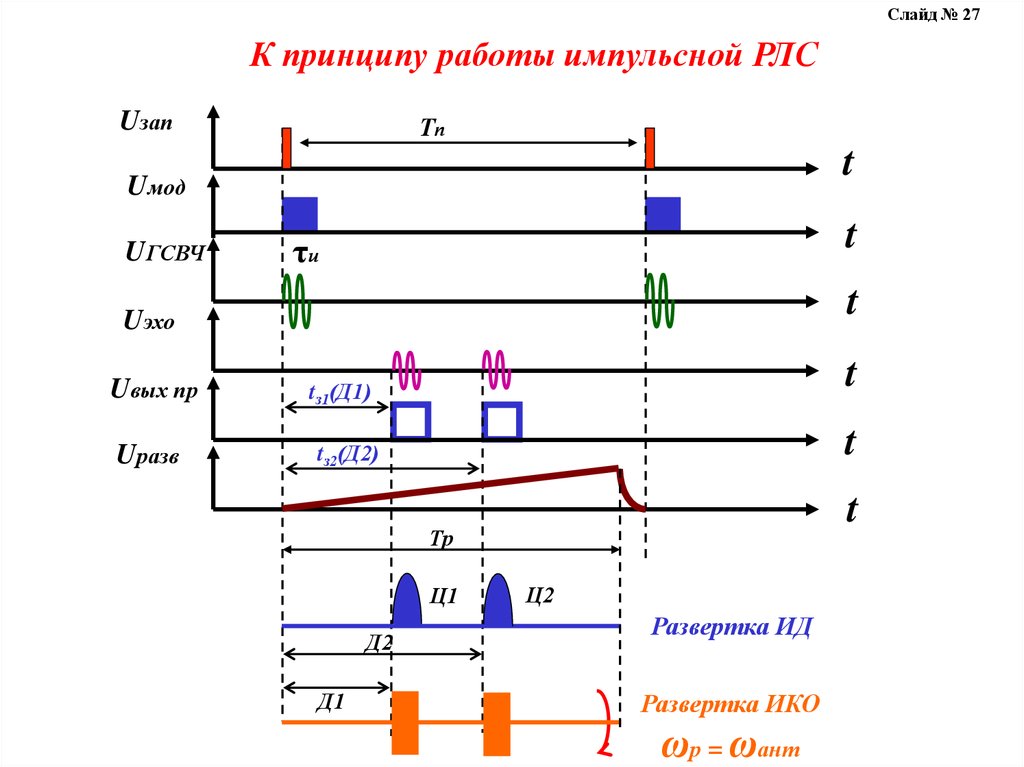
Слайд № 27К принципу работы импульсной РЛС
Uзап
Тп
t
Uмод
UГСВЧ
t
τи
t
Uэхо
Uвых пр
Uразв
t
tз1(Д1)
t
tз2(Д2)
t
Тр
Ц1
Д2
Д1
Ц2
Развертка ИД
Развертка ИКО
ωр = ωант
28.
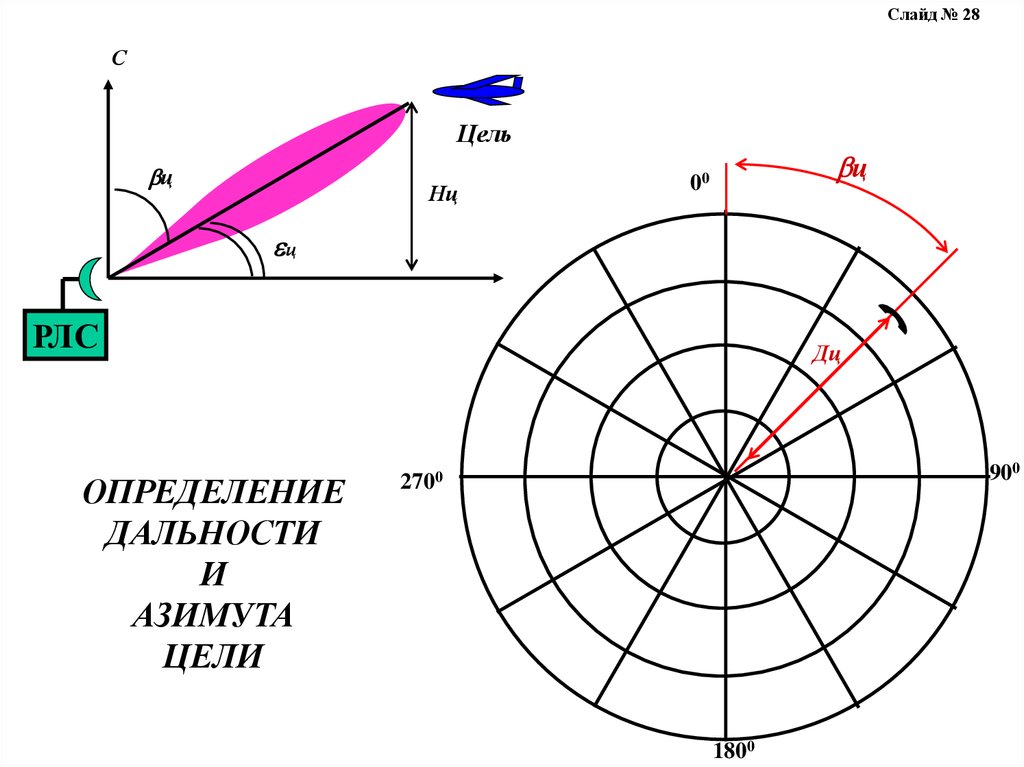
Слайд № 28С
Цель
ц
Нц
ц
00
ц
РЛС
ОПРЕДЕЛЕНИЕ
ДАЛЬНОСТИ
И
АЗИМУТА
ЦЕЛИ
Дц
900
2700
1800
29.
ВЫВОДЫСлайд № 29
1. Определение дальности до объекта при импульсном
методе сводится к измерению времени запаздывания
(tз) отраженного сигнала относительно зондирующего
импульса. Момент излучения зондирующего импульса
берется за начало отсчета времени распространения
радиоволн.
2. Достоинства импульсных РЛС:
- удобство визуального наблюдения одновременно вех
целей, облучаемых антенной в виде отметок на экране
индикаторов;
- поочередная работа передатчика и приемника позволяет использовать одну общую антенну для передачи
и приема.
30.
Слайд № 30ОСНОВНЫЕ ПОКАЗАТЕЛИ ИМПУЛЬСНОГО
МЕТОДА:
однозначно определяемая максимальная
дальность
Д
разрешающая способность по дальности
Д
минимально определяемая дальность
Дмин
31.
Слайд № 31ОДНОЗНАЧНО ОПРЕДЕЛЯЕМАЯ МАКСИМАЛЬНАЯ ДАЛЬНОСТЬ
Ц1
Ц2
Тп(150км)
Ц1
Ц2
50км
200км
50км
Дmax РЛС = 300км
Тп = 1000мкс
Дц1 = 100км
Дц2 = 200км
100км 150км
сТп 3 108 10 3
Д
2
2
1,5 105 150км
Тп t зад.макс.
2 Д м акс.
Тп
с
32.
Слайд № 32РАЗРЕШАЮЩАЯ СПОСОБНОСТЬ ПО ДАЛЬНОСТИ
Ц2
Ц1
Д1
и
РЛС
ц
Ц3
Ц4
Д2
Д
Д1
Ц1
Ц2
Д
Д1
Д2
Д2
ИД
ИКО
33.
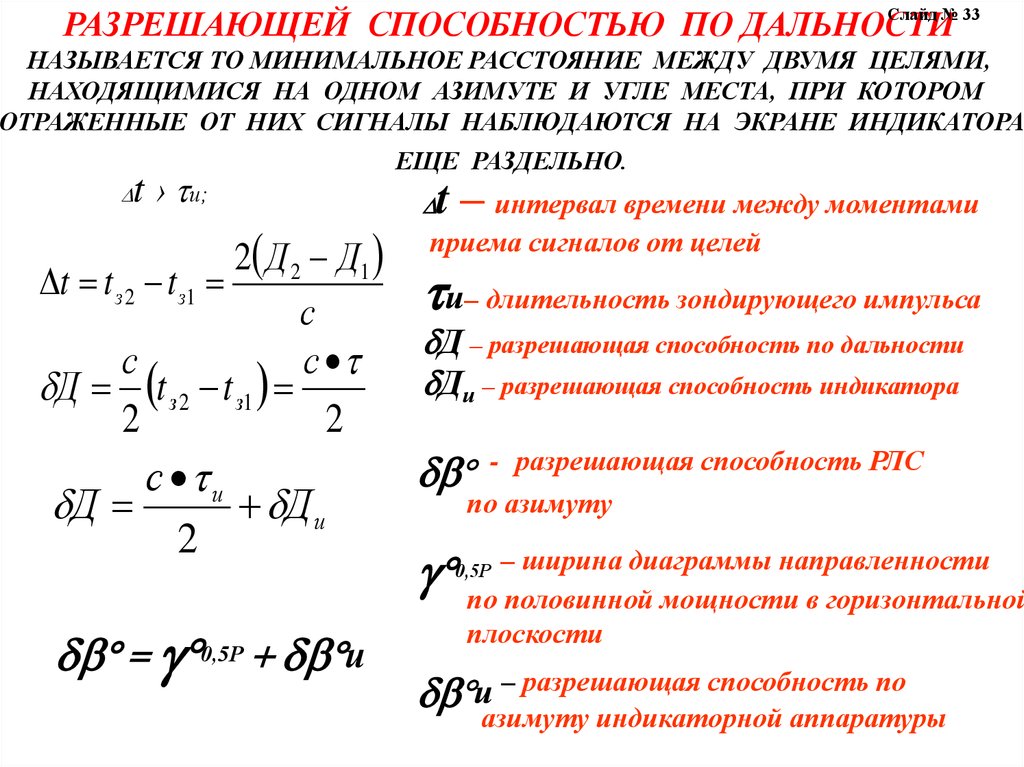
Слайд № 33РАЗРЕШАЮЩЕЙ СПОСОБНОСТЬЮ ПО ДАЛЬНОСТИ
НАЗЫВАЕТСЯ ТО МИНИМАЛЬНОЕ РАССТОЯНИЕ МЕЖДУ ДВУМЯ ЦЕЛЯМИ,
НАХОДЯЩИМИСЯ НА ОДНОМ АЗИМУТЕ И УГЛЕ МЕСТА, ПРИ КОТОРОМ
ОТРАЖЕННЫЕ ОТ НИХ СИГНАЛЫ НАБЛЮДАЮТСЯ НА ЭКРАНЕ ИНДИКАТОРА
t › и;
2 Д 2 Д1
t t з 2 t з1
с
с
с
Д t з 2 t з1
2
2
с и
Д
Д и
2
0,5Р и
ЕЩЕ РАЗДЕЛЬНО.
t – интервал времени между моментами
приема сигналов от целей
и– длительность зондирующего импульса
Д – разрешающая способность по дальности
Ди – разрешающая способность индикатора
- разрешающая способность РЛС
по азимуту
ширина диаграммы направленности
по –половинной
мощности в горизонтальной
0,5Р
плоскости
– разрешающая способность по
иазимуту
индикаторной аппаратуры
34.
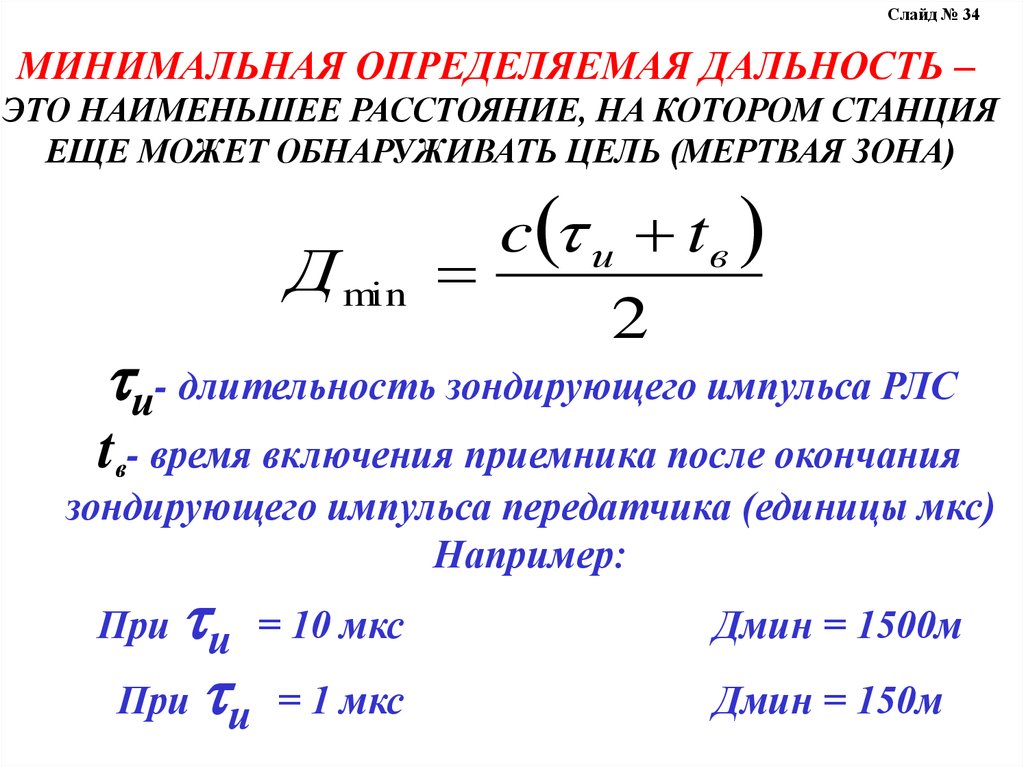
Слайд № 34МИНИМАЛЬНАЯ ОПРЕДЕЛЯЕМАЯ ДАЛЬНОСТЬ –
ЭТО НАИМЕНЬШЕЕ РАССТОЯНИЕ, НА КОТОРОМ СТАНЦИЯ
ЕЩЕ МОЖЕТ ОБНАРУЖИВАТЬ ЦЕЛЬ (МЕРТВАЯ ЗОНА)
Д min
c и tв
2
и- длительность зондирующего импульса РЛС
tв- время включения приемника после окончания
зондирующего импульса передатчика (единицы мкс)
Например:
При и = 10 мкс
При и = 1 мкс
Дмин = 1500м
Дмин = 150м
35.
Слайд № 35ОСНОВНЫЕ ПРИНЦИПЫ И
МЕТОДЫ РАДИОЛОКАЦИИ
Тема 1.
СПОСОБЫ УВЕЛИЧЕНИЯ
ДАЛЬНОСТИ ДЕЙСТВИЯ РЛС.
ЭФФЕКТ ДОПЛЕРА.
МЕТОДЫ ОПРЕДЕЛЕНИЯ КООРДИНАТ
Занятие 4.
Вопросы занятия.
1. Импульсно-частотный метод радиолокации.
2. Двухчастотный метод радиолокации.
3. Эффект Доплера и принцип измерения
радиальной скорости.
4. Методы определения угловых координат.
36.
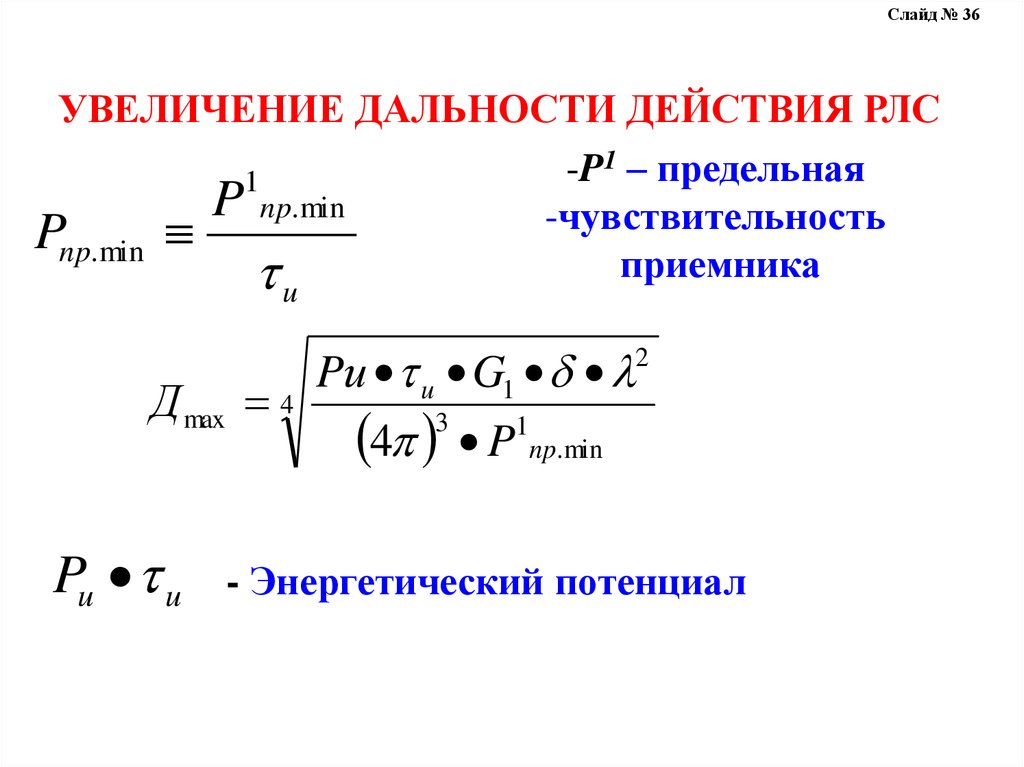
Слайд № 36УВЕЛИЧЕНИЕ ДАЛЬНОСТИ ДЕЙСТВИЯ РЛС
1 – предельная
-P
1
P np.min
-чувствительность
Pnp.min
приемника
u
Pи u G1
4
3
1
4 P np.min
2
Д max
Pu u
- Энергетический потенциал
37.
Слайд № 37Упрощенная структурная схема РЛС с
внутриимпульсной линейной частотной модуляцией
Передающее
устройство
Антенный
переключатель
Приемник
Синхронизатор
Сжимающий
фильтр
Индикаторное
устройство
Детектор
38.
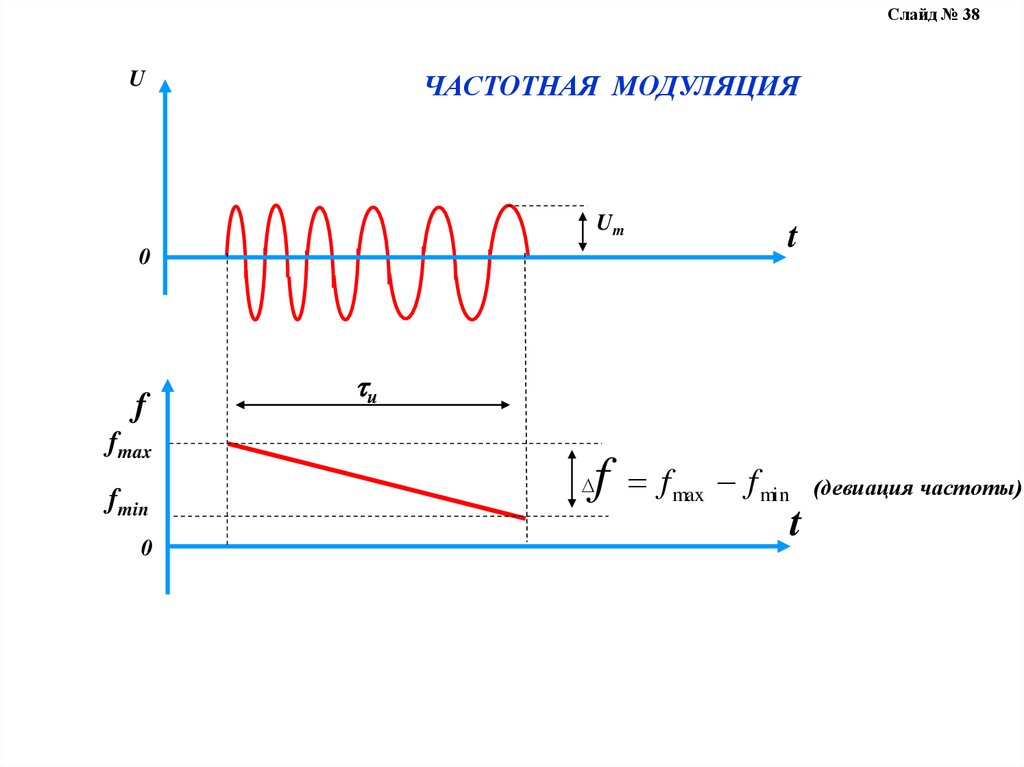
Слайд № 38ЧАСТОТНАЯ МОДУЛЯЦИЯ
U
Um
0
f
fmax
fmin
0
t
и
f
f max f min
(девиация частоты)
t
39.
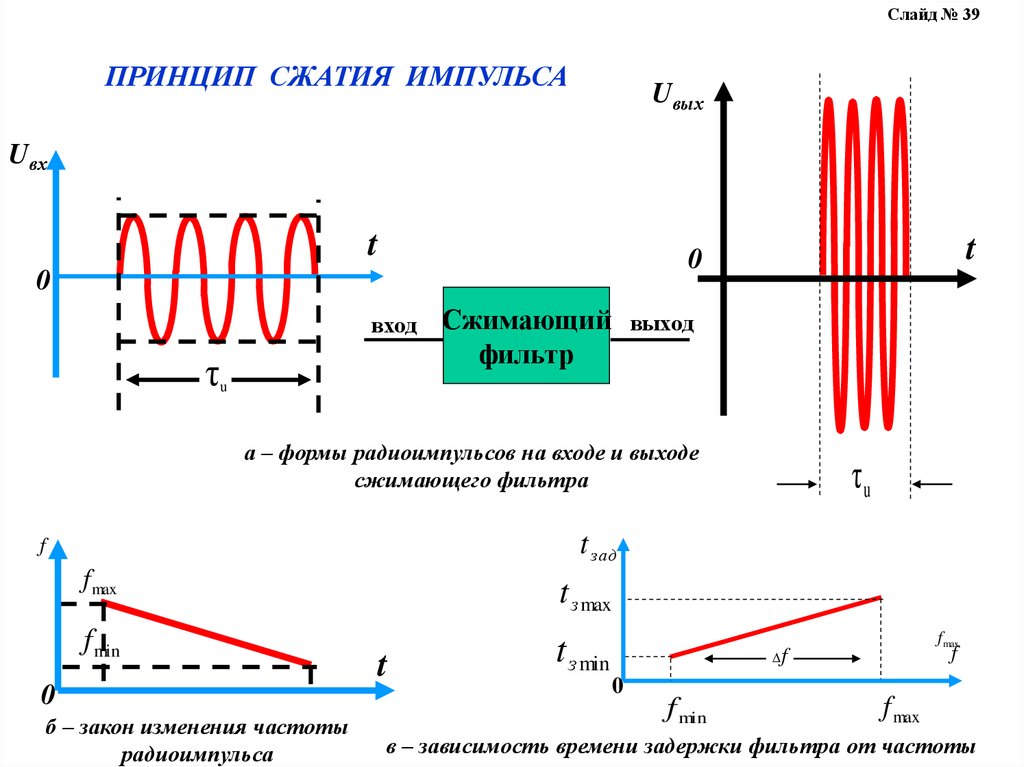
Слайд № 39ПРИНЦИП СЖАТИЯ ИМПУЛЬСА
Uвых
Uвх
t
0
вход
τ
t
0
Сжимающий
фильтр
выход
u
а – формы радиоимпульсов на входе и выходе
сжимающего фильтра
τu
t зад
f
f max
f min
0
б – закон изменения частоты
радиоимпульса
t з max
t
t з min
f max
f
f
0
f min
f max
в – зависимость времени задержки фильтра от частоты
40.
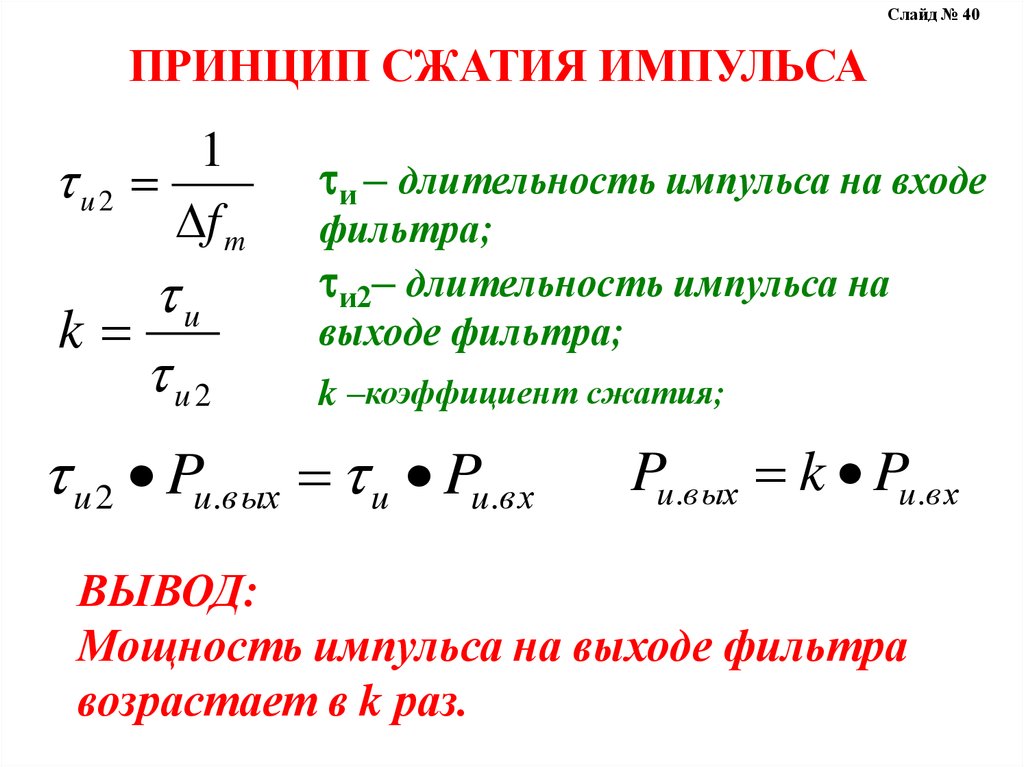
Слайд № 40ПРИНЦИП СЖАТИЯ ИМПУЛЬСА
u2
1
f m
u
k
u2
и – длительность импульса на входе
фильтра;
и2– длительность импульса на
выходе фильтра;
k –коэффициент сжатия;
u 2 Pu.вых u Pu.вх
Pu.вых k Pu.вх
ВЫВОД:
Мощность импульса на выходе фильтра
возрастает в k раз.
41.
Слайд № 41ПЕРЕДАТЧИК
f1
СИНХРОНИЗАТОР
Л.З.
ПЕРЕДАТЧИК
f2
АНТЕННЫЙ
ПЕРЕКЛЮЧАТЕЛЬ
СУММАТОР
СИГНАЛОВ
ИНДИКАТОР
УСТР-ВО
ЗАДЕРЖКИ
I ПРИЕМНИК
f1+Fg1
II ПРИЕМНИК
f2+Fg2
Упрощённая структурная
схема двухчастотной
импульсной РЛС
одновременного излучения
42.
иU зонд
f1
0
0
Uвх
II приемн.
U1
f2
U2
U= U1+ U2
U1= U2
Слайд № 42
f1
f2
t
Tn
f1 + Fg1
t
f1 + Fg1
f2 + Fg2
0
f2 + Fg2
t
Uвх
дет I.
t
0
Uвых дет I.
после
задержки
U1
Uвых
дет II.
U2
0
0
Uвых
после
сумматора
0
t
t
U вых = U1 + U2
U2
t
43.
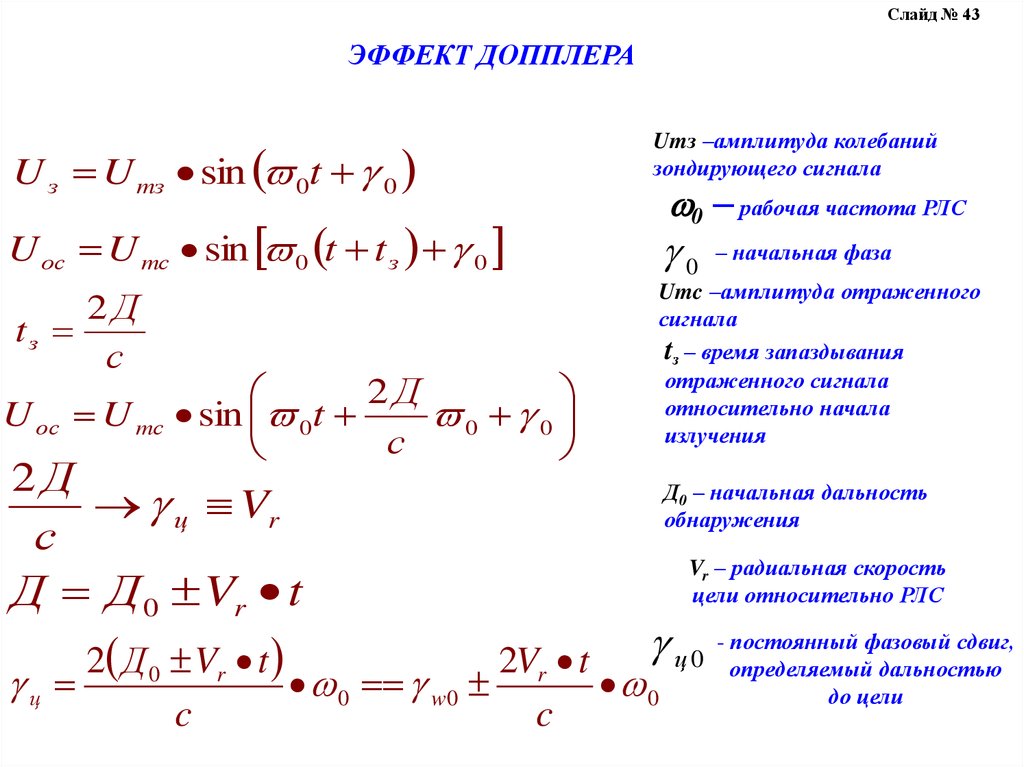
Слайд № 43ЭФФЕКТ ДОППЛЕРА
Umз –амплитуда колебаний
зондирующего сигнала
U з U mз sin 0t 0
0 – рабочая частота РЛС
U ос U mс sin 0 t t з 0
0
2Д
tз
с
U ос
2Д
U mс sin 0t
0 0
с
2Д
ц Vr
с
– начальная фаза
Umc –амплитуда отраженного
сигнала
tз – время запаздывания
отраженного сигнала
относительно начала
излучения
Д0 – начальная дальность
обнаружения
Vr – радиальная скорость
цели относительно РЛС
Д Д 0 Vr t
- постоянный фазовый сдвиг,
ц
0
2 Д 0 Vr t
2Vr t
определяемый дальностью
ц
0 w0
0
до цели
c
c
44.
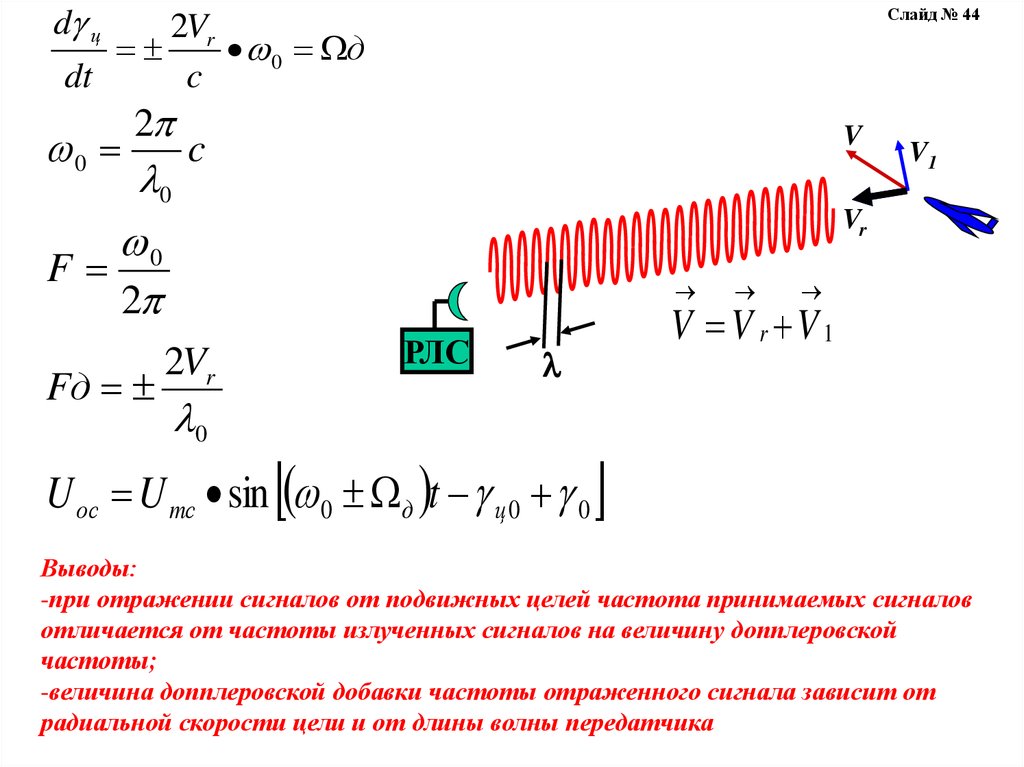
d цСлайд № 44
2Vr
0 д
dt
c
0
2
V
c
0
0
F
2
2Vr
Fд
0
V1
Vr
РЛС
V V r V 1
U ос U mс sin 0 д t ц 0 0
Выводы:
-при отражении сигналов от подвижных целей частота принимаемых сигналов
отличается от частоты излученных сигналов на величину допплеровской
частоты;
-величина допплеровской добавки частоты отраженного сигнала зависит от
радиальной скорости цели и от длины волны передатчика
45.
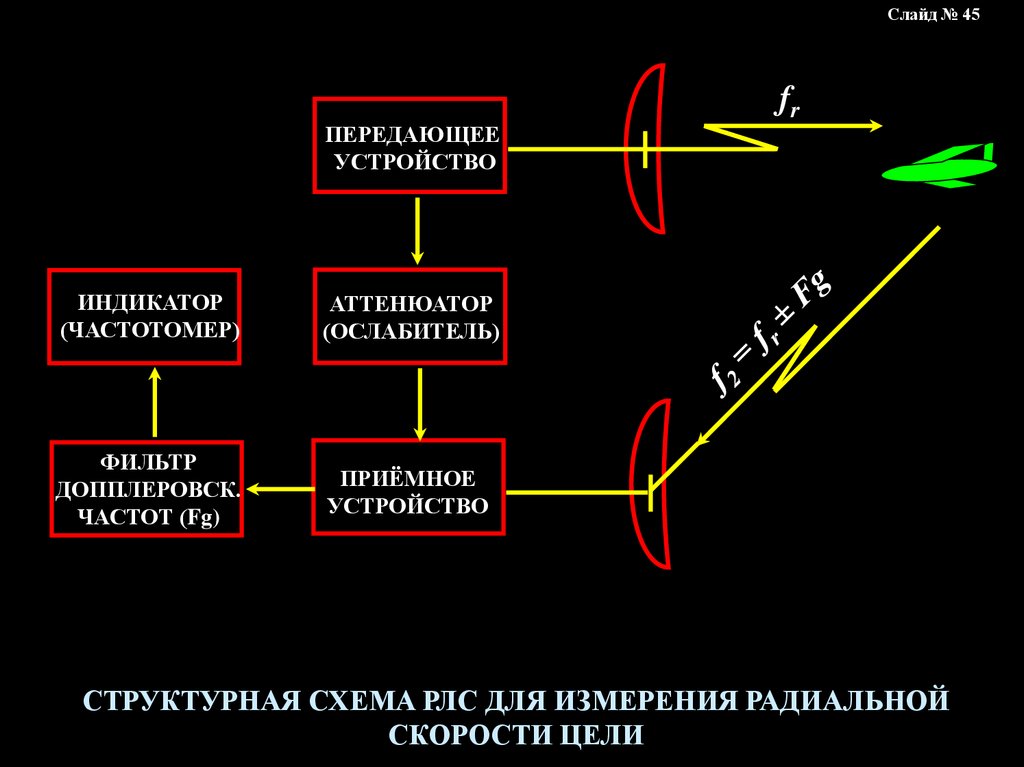
Слайд № 45ПЕРЕДАЮЩЕЕ
УСТРОЙСТВО
ИНДИКАТОР
(ЧАСТОТОМЕР)
АТТЕНЮАТОР
(ОСЛАБИТЕЛЬ)
ФИЛЬТР
ДОППЛЕРОВСК.
ЧАСТОТ (Fg)
ПРИЁМНОЕ
УСТРОЙСТВО
fr
СТРУКТУРНАЯ СХЕМА РЛС ДЛЯ ИЗМЕРЕНИЯ РАДИАЛЬНОЙ
СКОРОСТИ ЦЕЛИ
46.
Слайд № 46ВЫВОДЫ:
-Допплеровская частота обусловлена радиальной скоростью
цели
-Для неподвижных объектов (vr=0) частота отраженного
сигнала
равна частоте излучаемых колебаний
-При приближении цели частота отраженного сигнала
повышается
(fэс=fr+2 f), при удалении уменьшается (fэс=fr-2 f) .
Эффект Допплера позволяет выделить отраженные сигналы
от
подвижных целей на фоне отражений от неподвижных
местных
предметов или медленно перемещающихся объектов
47.
Слайд № 47Метод пеленгации по максимуму отраженного сигнала
Е
С
Д.Н.А.
0,5
0
РЛС
0,5р
ОСОБЕННОСТИ МЕТОДА:
-простота определения угловых координат;
-пеленгация осуществляется при наиболее благоприятном
отношении сигнал/шум,
поскольку пеленг отсчитывается в момент максимума сигнала;
-малая точность определения координат, так как вблизи максимума
ДНА
небольшие отклонения цели от оси антенны мало сказываются на
амплитуде
отраженного сигнала.
Ю
48.
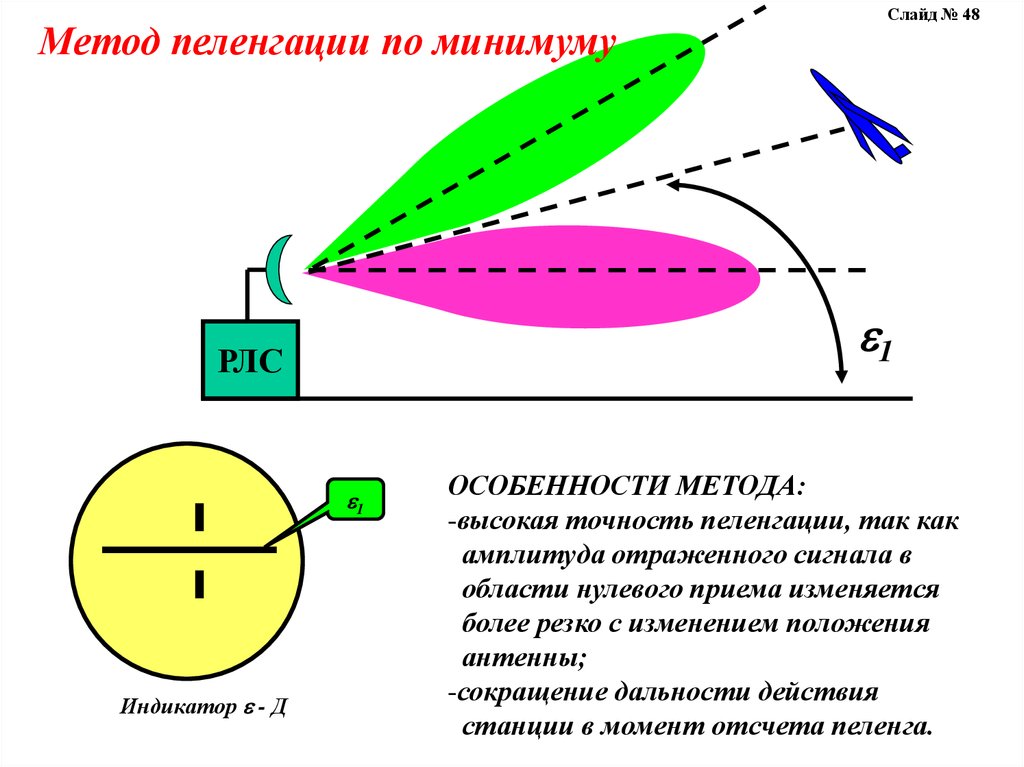
Метод пеленгации по минимуму1
РЛС
1
Индикатор - Д
Слайд № 48
ОСОБЕННОСТИ МЕТОДА:
-высокая точность пеленгации, так как
амплитуда отраженного сигнала в
области нулевого приема изменяется
более резко с изменением положения
антенны;
-сокращение дальности действия
станции в момент отсчета пеленга.
49.
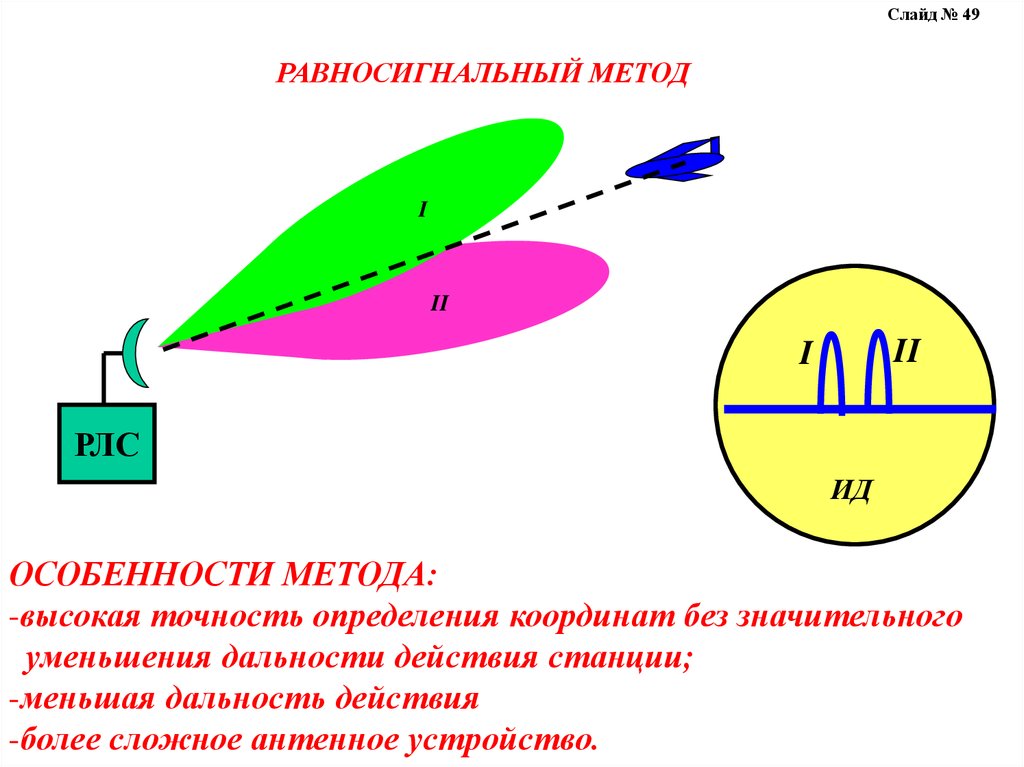
Слайд № 49РАВНОСИГНАЛЬНЫЙ МЕТОД
I
II
II
I
РЛС
ИД
ОСОБЕННОСТИ МЕТОДА:
-высокая точность определения координат без значительного
уменьшения дальности действия станции;
-меньшая дальность действия
-более сложное антенное устройство.
50.
Слайд № 50ВЫВОДЫ:
- Метод сжатия импульсов позволяет
повысить энергию в импульсе и
тем самым увеличить дальность
действия РЛС;
- Эффект Допплера, обусловленный
движением цели, позволяет выделить
отраженные сигналы от подвижных
целей на фоне отражений от неподвижных
местных предметов.
51.
Слайд № 51ОСНОВНЫЕ ПРИНЦИПЫ И
МЕТОДЫ РАДИОЛОКАЦИИ
Тема 1.
МЕТОДЫ ОБЗОРА ПРОСТРАНСТВА.
ОПРЕДЕЛЕНИЕ ВЫСОТЫ ПОЛЁТА ЦЕЛЕЙ.
Занятие 5.
Вопросы занятия.
1. Методы обзора пространства.
2. Принцип определения высоты полёта
целей.
3. Структурная схема радиовысотомера.
52.
Слайд № 52Перемещение направленного
электромагнитного луча антенны для
последовательного облучения окружающего
пространства называется
радиолокационным обзором
ВИДЫ ОБЗОРА:
-круговой;
-секторный;
-винтовой;
-спиральный;
-конический;
-пилообразный;
-строчный.
53.
Слайд № 53Круговой обзор
N обл 5...10имп.
ДОСТОИНСТВА МЕТОДА:
1.
Простота
2.
Минимальное время обзора пространства
3.
Почти непрерывное отображение воздушной
обстановки в заданной зоне обзора
tобл
0,5 р
а
tобл
N tобл Fп
Tп
0,5 р
N обл
Fп
а
0,5 p Fп
max
N обл. min
о 6 n об / мин
с
n об
РЛС
na.max
o
0,5 p
6 5...10
Fп об / мин
nA max
об / с
мин
6
1o 330
5...10 об / мин
6 5...10
54.
Слайд № 54Винтовой обзор
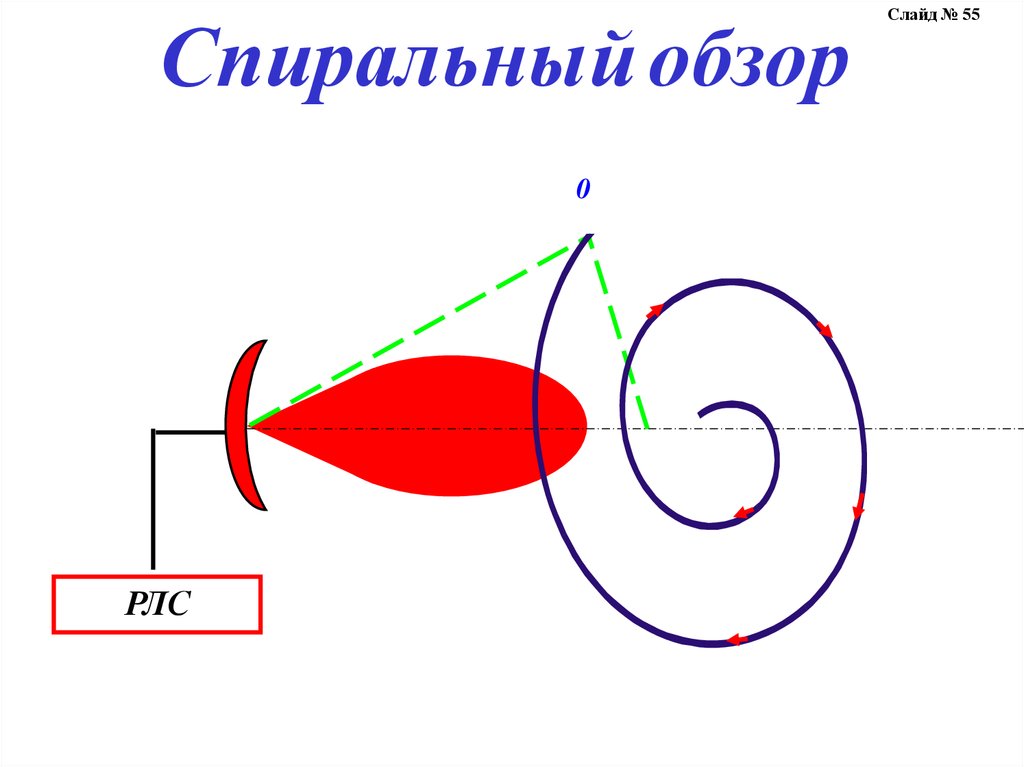
55.
Спиральный обзор0
РЛС
Слайд № 55
56.
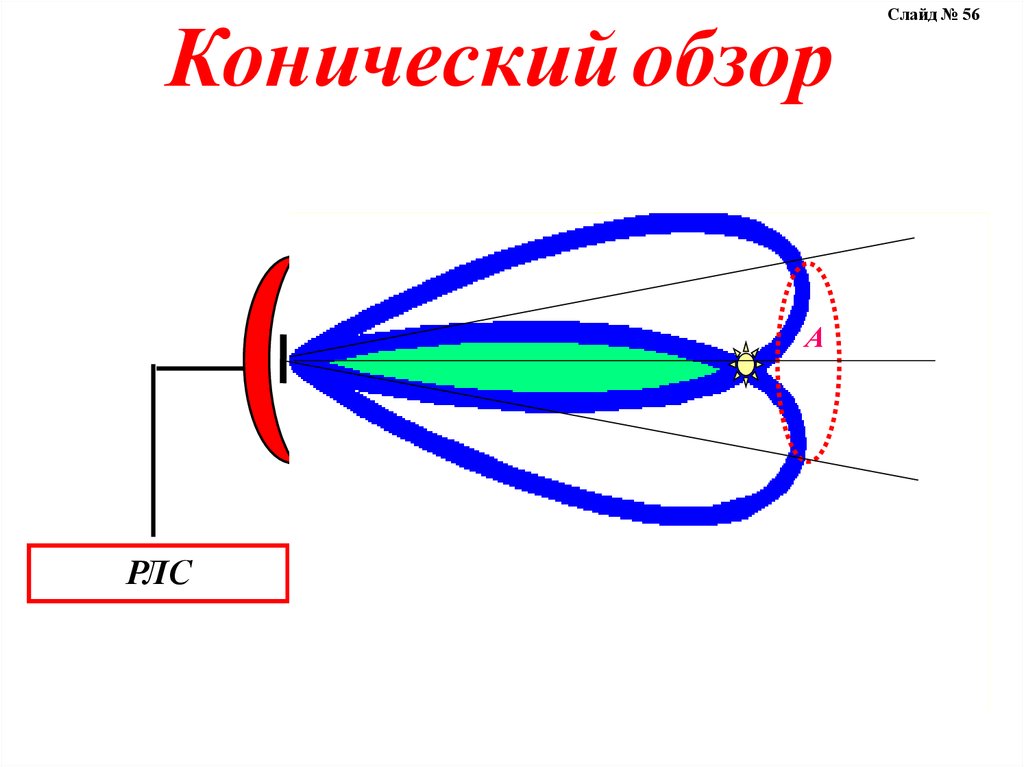
Конический обзорА
РЛС
Слайд № 56
57.
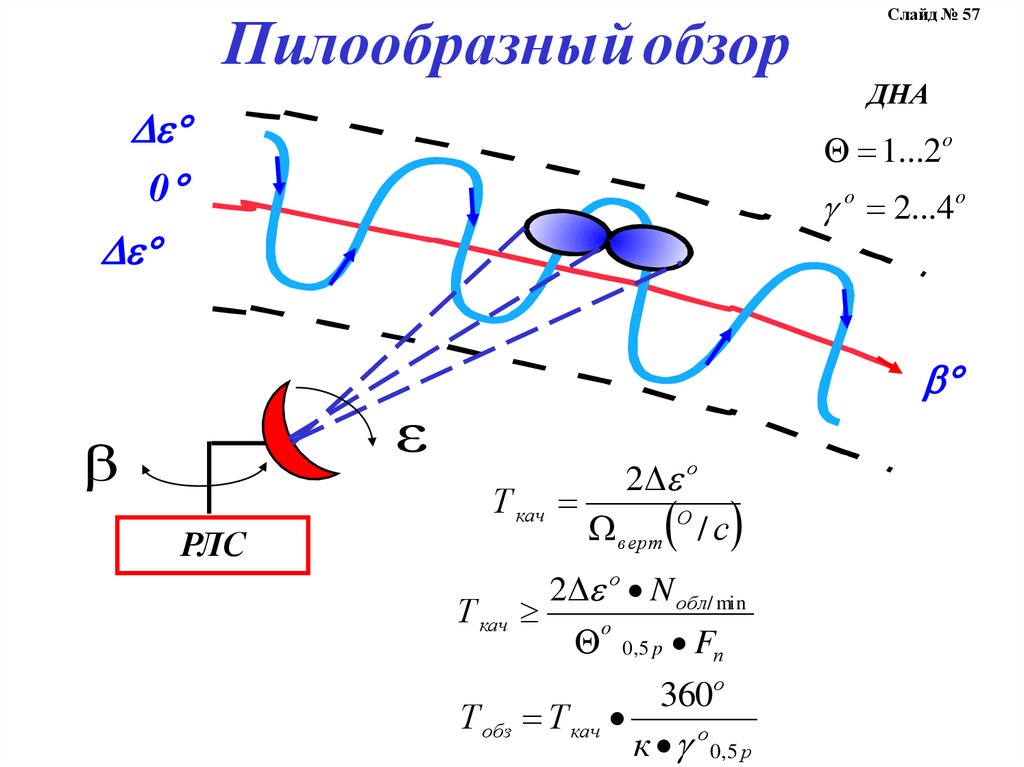
Пилообразный обзорДНА
0
1...2o
o 2...4o
ε
β
РЛС
Слайд № 57
Т кач
Т кач
Т обз
2 о
верт О / с
2 о N обл / min
o
0,5 p
Fп
360о
Т кач
к о 0,5 р
58.
Слайд № 58Высота полета цели для
горизонтальной поверхности
Цель
H1
ε
0
0
H1= Дн*sin о
59.
Слайд № 59H ц Д н sin ε
Цель
2
0
Дн
2 Rэ
Rэ 8500км
ε
H1 Д н sin ε 0
0
Hц
РB
2
H2
Дн
2 Rэ
Линия
горизонта
Поверхность земли
Rз
Rз
Принцип определения высоты полета цели
60.
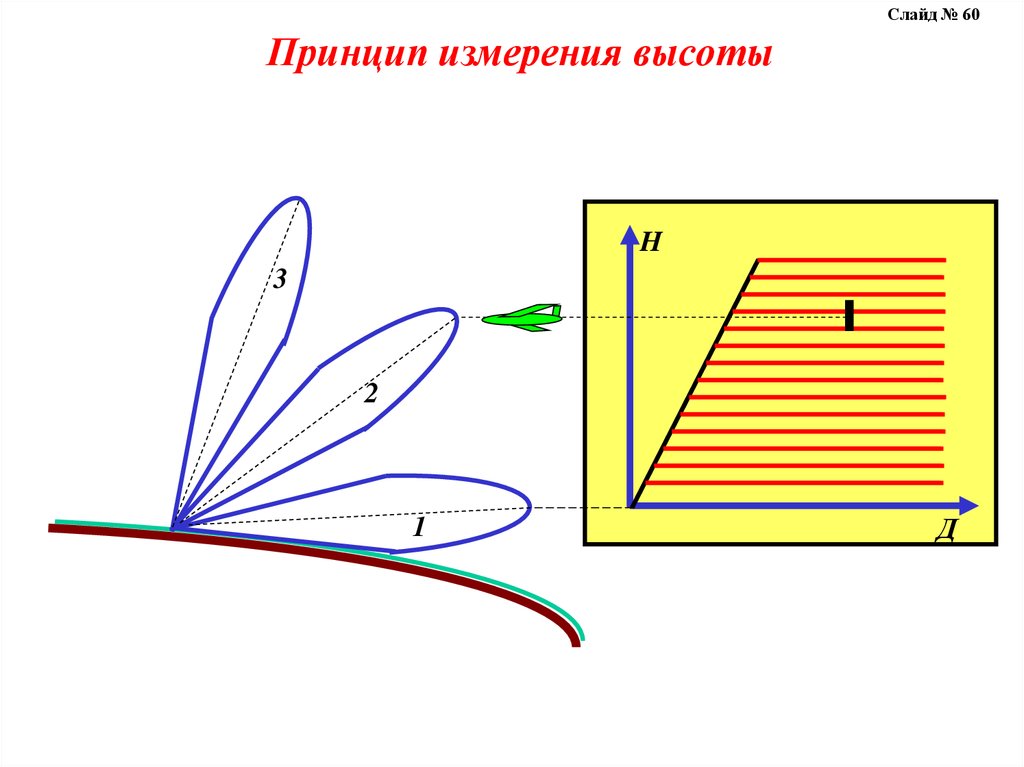
Слайд № 60Принцип измерения высоты
H
3
2
1
Д
61.
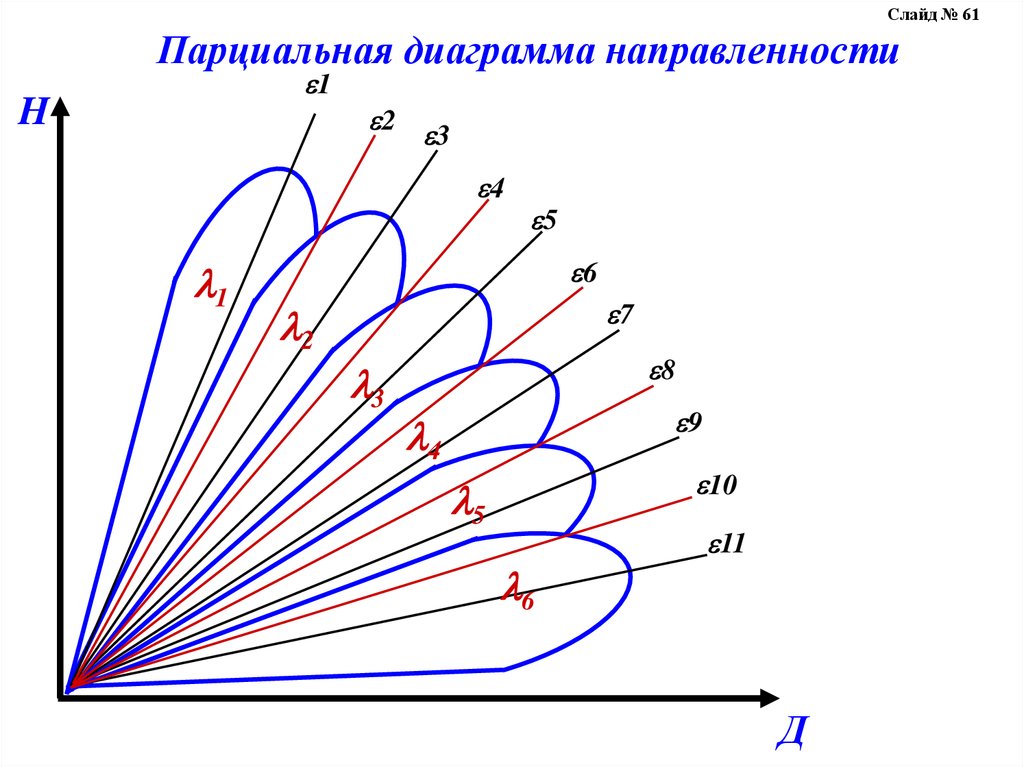
Слайд № 61Парциальная диаграмма направленности
1
H
2 3
4
1
5
6
2
7
3
8
9
4
10
5
6
11
Д
62.
Тема 1.ОСНОВНЫЕ ПРИНЦИПЫ И
МЕТОДЫ РАДИОЛОКАЦИИ
Слайд № 12
Слайд № 62
ОСНОВНЫЕ ТАКТИКО-ТЕХНИЧЕСКИЕ
ХАРАКТЕРИСТИКИ ИМПУЛЬСНЫХ РЛС
И ТРЕБОВАНИЯ, ПРЕДЪЯВЛЯЕМЫЕ К НИМ.
Занятие 6.
Вопросы занятия.
1. Классификация РЛС и области применения
радиолокации.
2. Тактические и технические характеристики
импульсных РЛС.
3. Требования, предъявляемые к тактикотехническим
характеристикам РЛС.
63.
Слайд № 63Основные тактические характеристики
1. Максимальная дальность обнаружения.
2. Зона обнаружения и её параметры.
3. Состав радиолокационной и её качественные
показатели.
4. Темп выдачи радиолокационной информации.
5. Помехозащищенность.
6. Мобильность и эксплуатационная надежность.
64.
Слайд № 64МАКСИМАЛЬНАЯ ДАЛЬНОСТЬ ДЕЙСТВИЯ
Д max
Pu G σ S a
4
2
(4 ) Pпр.min
Д пр 127 ( ha H Ц ), км
Д min
C ( τ u tв )
2
65.
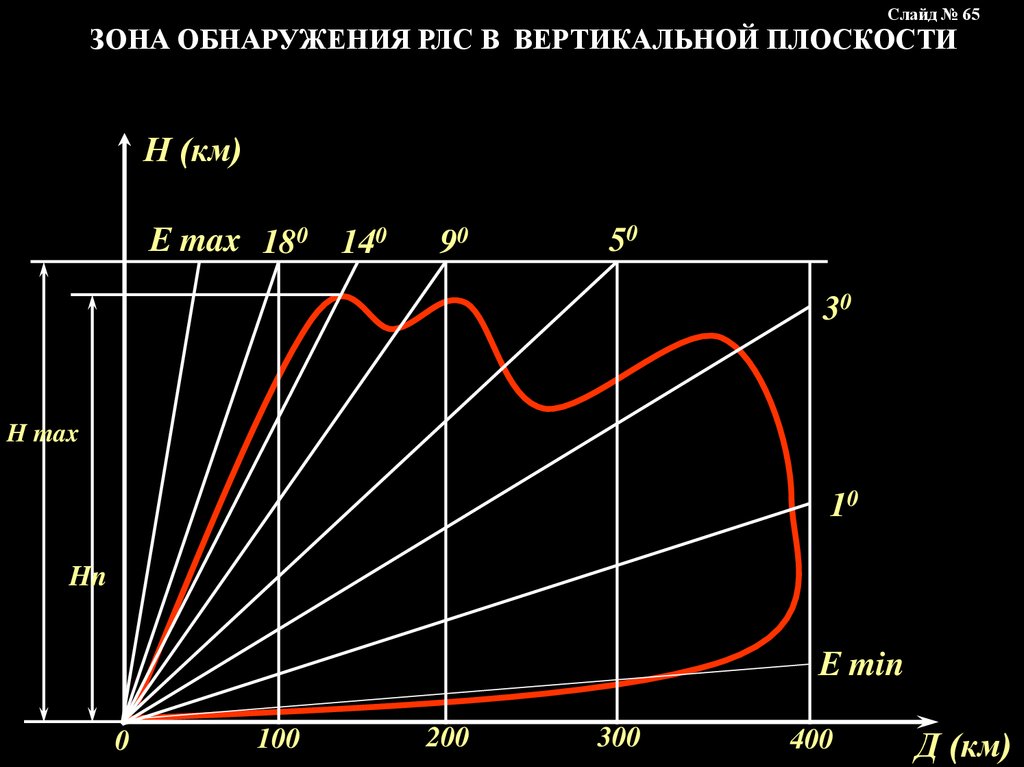
Слайд № 65ЗОНА ОБНАРУЖЕНИЯ РЛС В ВЕРТИКАЛЬНОЙ ПЛОСКОСТИ
Н (км)
Е max 180 140
90
50
30
H max
10
Hn
Е min
0
100
200
300
400
Д (км)
66.
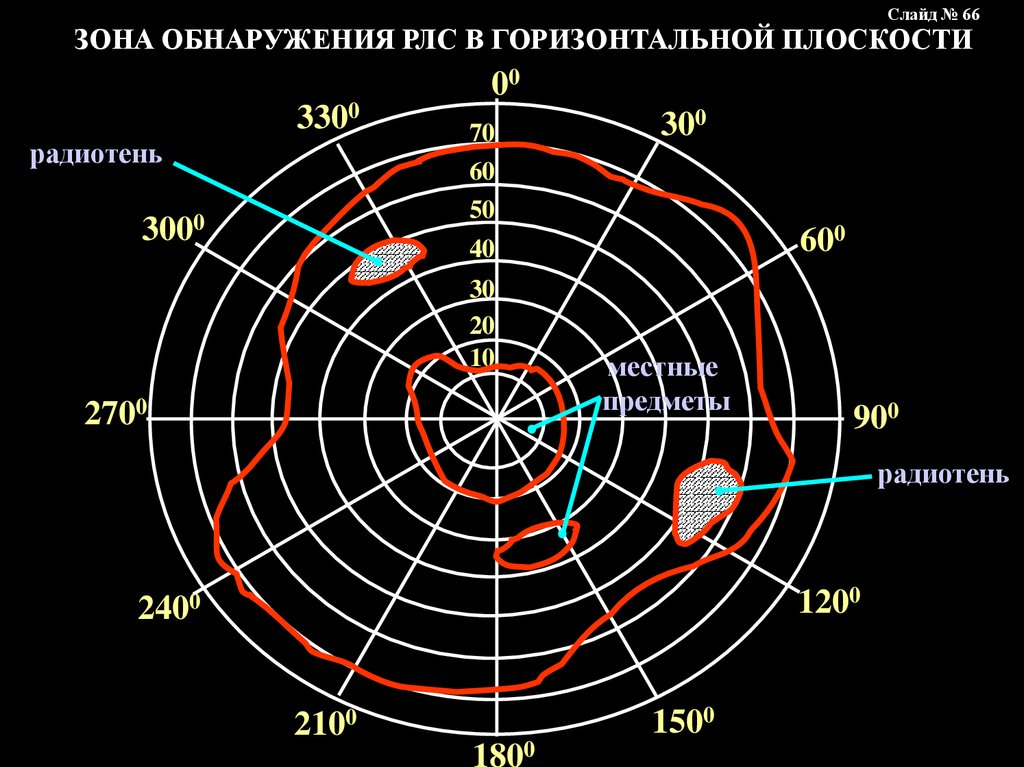
Слайд № 66ЗОНА ОБНАРУЖЕНИЯ РЛС В ГОРИЗОНТАЛЬНОЙ ПЛОСКОСТИ
00
3300
радиотень
70
60
300
50
40
3000
30
20
10
2700
600
местные
предметы
900
радиотень
1200
2400
2100
1500
1800
67.
Слайд № 67СОСТАВ РАДИОЛОКАЦИОННОЙ ИНФОРМАЦИИ
РЛС МОЖЕТ ВЫДАВАТЬ СЛЕДУЮЩУЮ ИНФОРМАЦИЮ:
1. КООРДИНАТЫ ОБНАРУЖИВАЕМЫХ ЦЕЛЕЙ;
2. СКОРОСТЬ ДВИЖЕНИЯ ЦЕЛИ;
3. СОСТАВ ЦЕЛИ (КОЛИЧЕСТВО САМОЛЁТОВ);
4. ГОСУДАРСТВЕННУЮ ПРИНАДЛЕЖНОСТЬ ЦЕЛИ;
5. ИНТЕНСИВНОСТЬ И ВИД ПРИМЕНЯЕМЫХ ПОМЕХ;
6. ДЕЙСТВИЯ, СОВЕРШАЕМЫЕ ЦЕЛЬЮ
ПРИ ЕЁ СОПРОВОЖДЕНИИ, И ДР.
68.
Слайд № 68Информационная способность РЛС
Под информационной способностью РЛС
понимают количество одновременно
сопровождаемых
станцией целей, по которым выдается
информация
с заданной дискретностью
69.
Слайд № 69Помехозащищенность РЛС
Под помехозащищенностью РЛС
понимают
ее способность выполнять свои
функции при
воздействии внешних помех
70.
Слайд № 70Эксплуатационная надежность
Эксплуатационная надежность –
способность
РЛС выполнять свои тактические
функции
и сохранять значения параметров при
заданных условиях эксплуатации
71.
Слайд № 71Мобильность
Мобильность определяется
возможностями
РЛС к передислокации на новую
позицию, условиями транспортировки,
сроками развертывания (свертывания) и
готовностью к боевой работе
72.
Слайд № 72ОСНОВНЫЕ ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ
1. Мощность излучения (импульсная
РИ и средняя РСР);
2. Длительность импульса ;
3. Рабочая длина волны или несущая
частота колебаний;
4. Частота повторения импульсов;
5. Чувствительность РПР.МИН и полоса
пропускания приёмного устройства;
73.
Слайд № 736. Углы раствора луча антенны (ДНА) в
горизонтальной и вертикальной
плоскостях, коэффициент
направленного действия (усиления)
антенны;
7. Метод обзора пространства;
8. Способы измерения дальности и
угловых координат;
9. Тип оконечного устройства
(индикатора);
74.
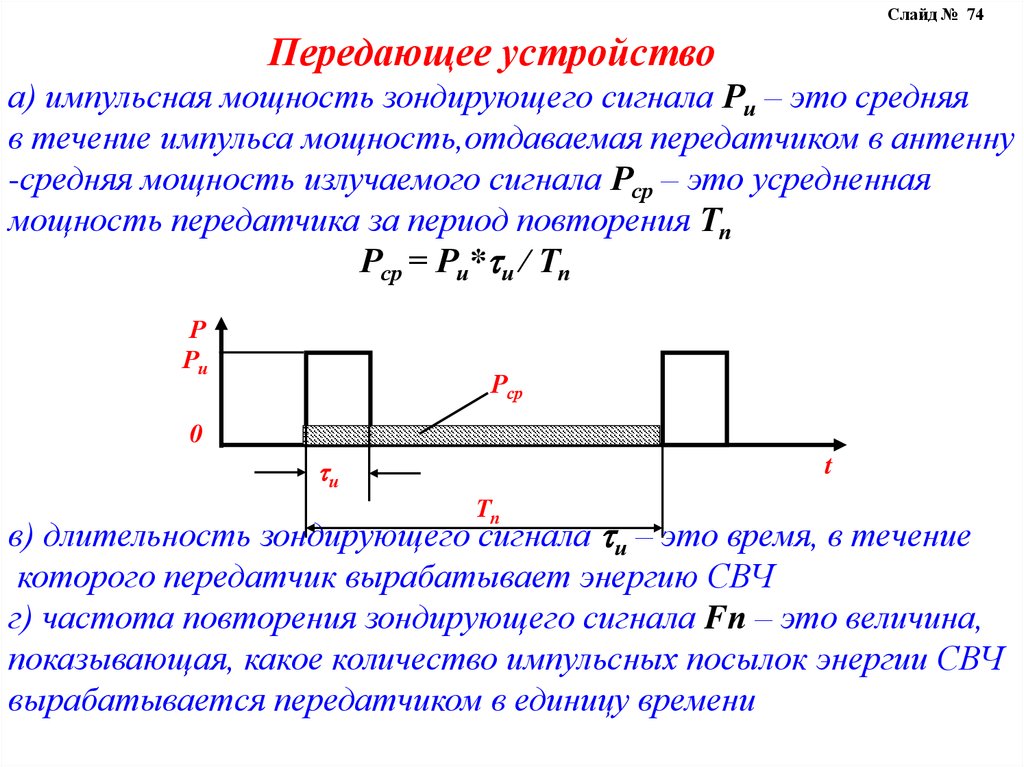
Слайд № 74Передающее устройство
а) импульсная мощность зондирующего сигнала Ри – это средняя
в течение импульса мощность,отдаваемая передатчиком в антенну
-средняя мощность излучаемого сигнала Рср – это усредненная
мощность передатчика за период повторения Тп
Рср = Ри* и / Тп
Р
Ри
Рср
0
и
t
Тп
в) длительность зондирующего сигнала и – это время, в течение
которого передатчик вырабатывает энергию СВЧ
г) частота повторения зондирующего сигнала Fп – это величина,
показывающая, какое количество импульсных посылок энергии СВЧ
вырабатывается передатчиком в единицу времени
75.
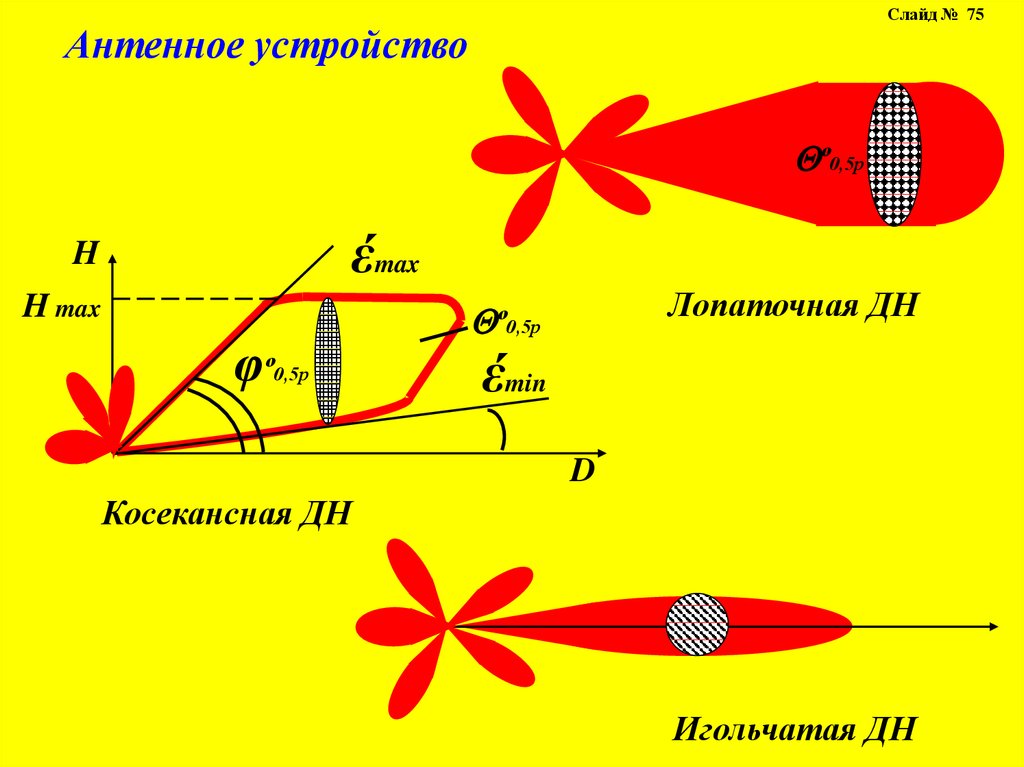
Слайд № 75Антенное устройство
º0,5р
έmax
H
H max
Лопаточная ДН
º0,5р
φº
0,5р
έmin
D
Косекансная ДН
Игольчатая ДН
76.
Приемное устройствоСлайд № 76
1. Чувствительность Рпр.мин. – это такая минимальная
мощность
или напряжение на входе приемника, при которой на
его выходе
обеспечивается обнаружение сигнала с заданным
превышением
над собственными шумами.
2. Коэффициент шума Кш – это величина, показывающая,
во сколько
раз отношение мощности сигнала к мощности шума
на входе приемника больше этого же отношения на его выходе:
Рс / Рш вх
Кш
1
Рс / Рш вых
77.
Слайд № 773. Коэффициент усиления (К) показывает во
сколько раз сигнал на
выходе приемника больше, чем на его
входе.
4. Полоса пропускания 2 F характеризует
избирательные свойства
приемника и определяет одновременно
пропускаемую приемником
область частот.
5. Динамический диапазон определяет
способность приемника
работать без перегрузки при воздействии
сильных помех.