










 management
managementSimilar presentations:










Синтез информационной модели для поддержки принятия решений при управлении воздушным движением
1.
СИНТЕЗ ИНФОРМАЦИОННОЙ МОДЕЛИ ДЛЯ ПОДДЕРЖКИ ПРИНЯТИЯРЕШЕНИЙ ПРИ УПРАВЛЕНИИ ВОЗДУШНЫМ ДВИЖЕНИЕМ
1
Цель исследования
Положения выносимые на защиту
Повышение эффективности взаимодействия 1. Многофакторный показатель качества деятельности ЛПР,
ЛПР с комплексом средств автоматизации отличающийся инвариантностью к назначению, целям, решаемым
районного
диспетчерского
центра
задачам и сложности системы управления, позволяющий решать
при выполнении функций по руководству двухкритериальную задачу оценки эффективности ИМ для
потоками
воздушных
судов
за
счет поддержки принятия решений по временной и точностной
использования усовершенствованной ИМ для составляющим, а также наглядно характеризовать эффективность
поддержки принятия решений.
ИМ.
Задачи исследования
2. Аналитическая модель взаимодействия ЛПР с комплексом
1._Анализ ИМ для поддержки принятия средств автоматизации, отличающаяся учетом структурных
решений в АСУВД и методов их построения с особенностей системы управления, точности реализации
учетом особенностей руководства потоками и временных характеристик режима управления, позволяющая
воздушных судов в условиях увеличения проводить численную оценку эффективности представления
интенсивности воздушного движения.
информации, а также предъявлять требования к ИМ
2._Разработка
аналитической
модели для поддержки принятия решений по безошибочности
взаимодействия ЛПР с комплексом средств и оперативности деятельности ЛПР.
автоматизации
с
учетом
пропускной 3. Алгоритм структурно-параметрического синтеза ИМ
способности
ЛПР
и
точности
его для поддержки принятия решений в АСУВД, отличающийся
деятельности.
использованием
метода
построения
дерева
событий
3._Разработка
алгоритма
структурно- при формировании структуры ИМ, аналитической модели
параметрического синтеза ИМ для поддержки взаимодействия ЛПР с комплексом средств автоматизации,
принятия решений в АСУВД, использование а также многофакторного показателя качества деятельности ЛПР,
которого позволяет создать эффективную ИМ. что позволяет в результате использования алгоритма повысить
4._Синтез ИМ для поддержки принятия эффективность взаимодействия ЛПР с комплексом средств
решений,
проверка
адекватности
автоматизации по времени выполнения действий ЛПР не менее
и эффективности.
чем на 16 %, по точности выполнения действий ЛПР не менее чем
Объект исследования – ИМ для поддержки на 49 %, с доверительной вероятностью 0,95 и относительной
принятия решений в АСУВД.
погрешностью 10 %, а также по усредненной по определенному
Предмет
исследования
–
научно- набору действий вероятности безошибочной деятельности ЛПР
методический аппарат формирования ИМ с 0,056 до 0,232 (для типовых условий).
для поддержки принятия решений.
2.
ИНТЕНСИВНОСТЬ СОВРЕМЕННОГО ВОЗДУШНОГО ДВИЖЕНИЯ2
3.
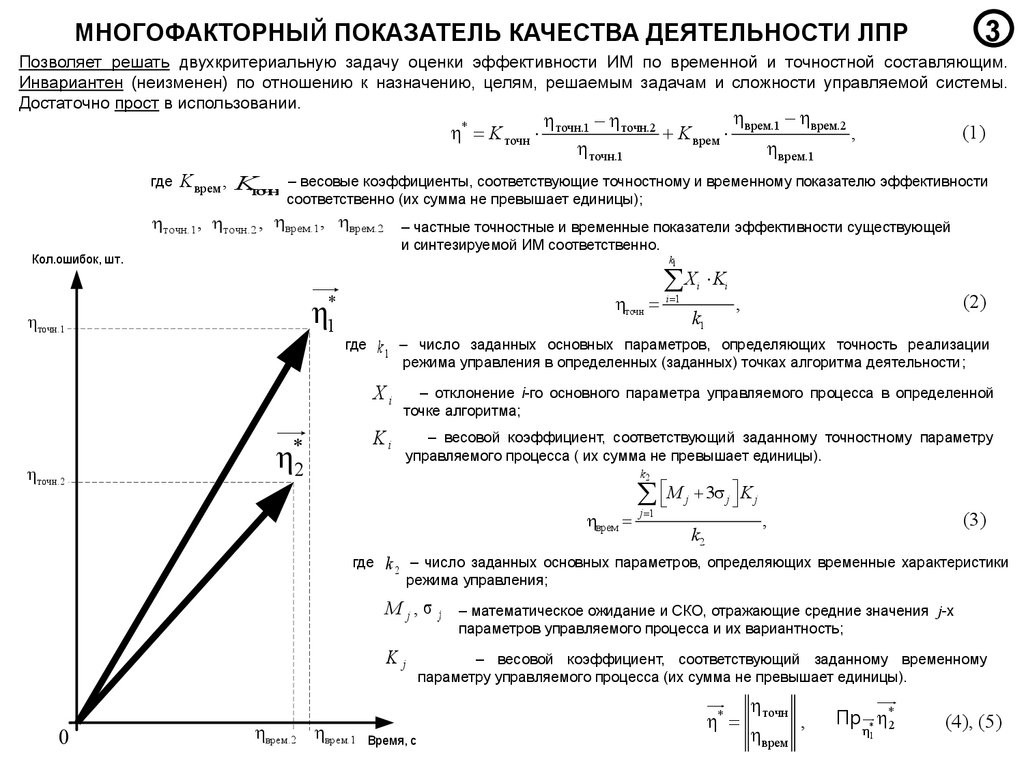
3МНОГОФАКТОРНЫЙ ПОКАЗАТЕЛЬ КАЧЕСТВА ДЕЯТЕЛЬНОСТИ ЛПР
Позволяет решать двухкритериальную задачу оценки эффективности ИМ по временной и точностной составляющим.
Инвариантен (неизменен) по отношению к назначению, целям, решаемым задачам и сложности управляемой системы.
Достаточно прост в использовании.
* K точн
где K врем , K
точн
врем.2
точн.1 точн.2
K врем врем.1
,
точн.1
врем.1
(1)
– весовые коэффициенты, соответствующие точностному и временному показателю эффективности
соответственно (их сумма не превышает единицы);
точн.1 , точн.2 , врем.1 , врем.2 – частные точностные и временные показатели эффективности существующей
и синтезируемой ИМ соответственно.
η1*
Кол.ошибок, шт.
ηточн.1
k1
ηточн
где
X K
i 1
i
k1
i
(2)
,
k 1 – число заданных основных параметров, определяющих точность реализации
режима управления в определенных (заданных) точках алгоритма деятельности;
ηточн.2
η*2
Xi
– отклонение i-го основного параметра управляемого процесса в определенной
точке алгоритма;
Ki
– весовой коэффициент, соответствующий заданному точностному параметру
управляемого процесса ( их сумма не превышает единицы).
k2
врем
где
M j 3 j K j
j 1
k2
(3)
,
k 2 – число заданных основных параметров, определяющих временные характеристики
режима управления;
M j, j
Kj
0
ηврем.2 ηврем.1 Время, с
– математическое ожидание и СКО, отражающие средние значения j-х
параметров управляемого процесса и их вариантность;
– весовой коэффициент, соответствующий заданному временному
параметру управляемого процесса (их сумма не превышает единицы).
точн
*
,
врем
Пр * *2
1
(4), (5)
4.
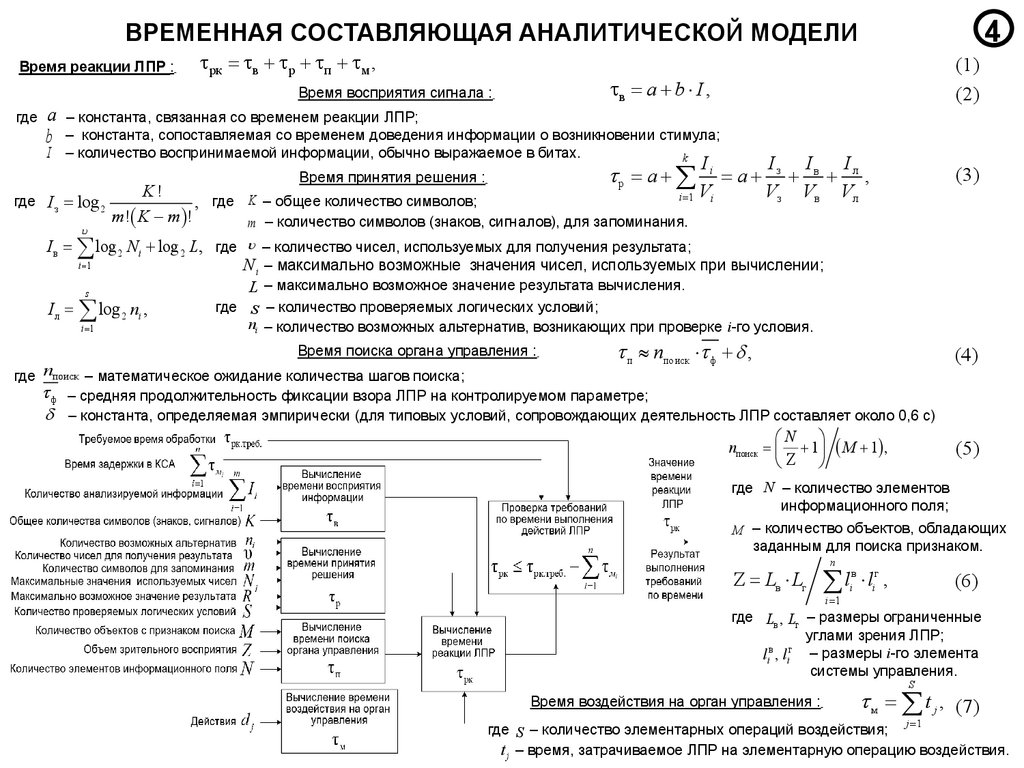
4ВРЕМЕННАЯ СОСТАВЛЯЮЩАЯ АНАЛИТИЧЕСКОЙ МОДЕЛИ
Время реакции ЛПР :
рк в р п м ,
(1)
(2)
в a b I ,
Время восприятия сигнала :
где a – константа, связанная со временем реакции ЛПР;
b – константа, сопоставляемая со временем доведения информации о возникновении стимула;
I – количество воспринимаемой информации, обычно выражаемое в битах.
k
I
i 1 Vi
I
Vз
I
Vв
р a i a з в
Время принятия решения :
K!
где I з log 2
, где K – общее количество символов;
m ! K m !
m – количество символов (знаков, сигналов), для запоминания.
I в log 2 N i log 2 L, где – количество чисел, используемых для получения результата;
i 1
N i – максимально возможные значения чисел, используемых при вычислении;
s
I л log 2 ni ,
i 1
Iл
,
Vл
(3)
L – максимально возможное значение результата вычисления.
где
s – количество проверяемых логических условий;
ni – количество возможных альтернатив, возникающих при проверке i-го условия.
Время поиска органа управления :
п nпоиск ф ,
где nпоиск – математическое ожидание количества шагов поиска;
ф – средняя продолжительность фиксации взора ЛПР на контролируемом параметре;
– константа, определяемая эмпирически (для типовых условий, сопровождающих деятельность ЛПР составляет около 0,6 с)
N
nпоиск 1 M 1 ,
(4)
(5)
где N – количество элементов
информационного поля;
M – количество объектов, обладающих
заданным для поиска признаком.
Lв Lг
n
l l ,
i 1
в
i
г
i
(6)
где Lв , Lг – размеры ограниченные
углами зрения ЛПР;
liв , liг – размеры i-го элемента
системы управления.
S
Время воздействия на орган управления :
м t j , (7)
j 1
где S – количество элементарных операций воздействия;
t j – время, затрачиваемое ЛПР на элементарную операцию воздействия.
5.
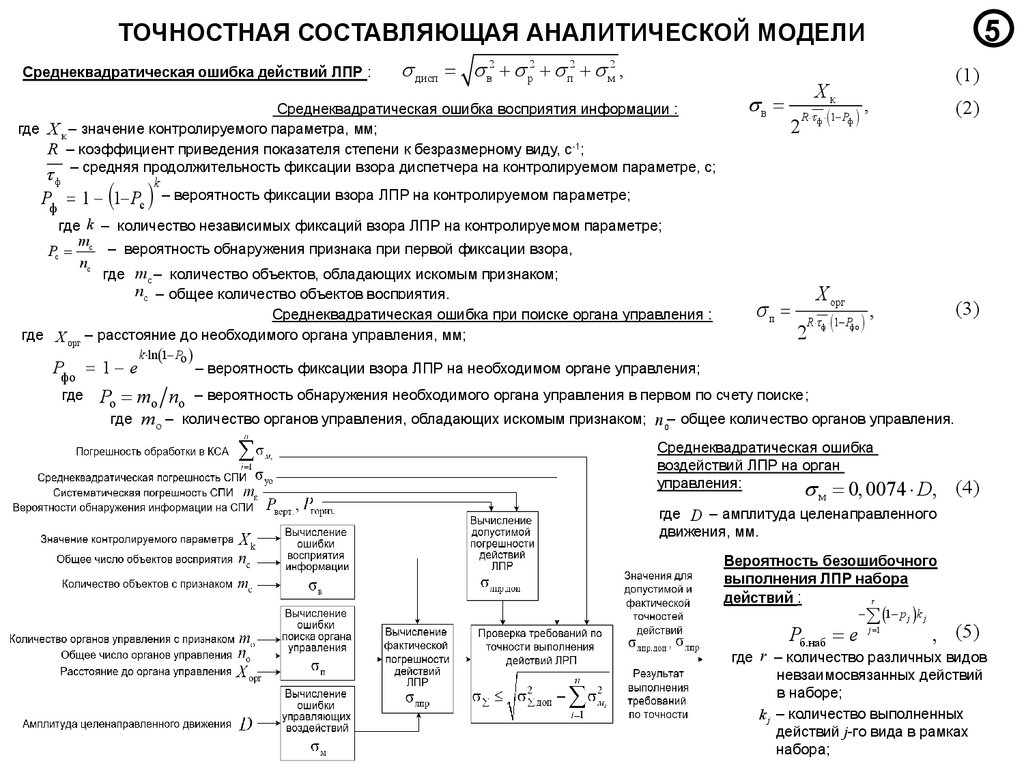
5ТОЧНОСТНАЯ СОСТАВЛЯЮЩАЯ АНАЛИТИЧЕСКОЙ МОДЕЛИ
Среднеквадратическая ошибка действий ЛПР :
дисп в2 р2 п2 м2 ,
Среднеквадратическая ошибка восприятия информации :
где X к – значение контролируемого параметра, мм;
R – коэффициент приведения показателя степени к безразмерному виду, с -1;
– средняя продолжительность фиксации взора диспетчера на контролируемом параметре, с;
(1)
X
в R к1 P ,
2 ф ф
(2)
ф
k
Pф 1 1 Pc – вероятность фиксации взора ЛПР на контролируемом параметре;
где k – количество независимых фиксаций взора ЛПР на контролируемом параметре;
m
Pc c – вероятность обнаружения признака при первой фиксации взора,
nc
где mc – количество объектов, обладающих искомым признаком;
nc – общее количество объектов восприятия.
Среднеквадратическая ошибка при поиске органа управления :
где Х орг – расстояние до необходимого органа управления, мм;
Pфо 1 е
где
k ln 1 Pо
п
2
Х орг
,
R ф 1 Pфо
(3)
– вероятность фиксации взора ЛПР на необходимом органе управления;
Pо mо nо – вероятность обнаружения необходимого органа управления в первом по счету поиске;
где mо – количество органов управления, обладающих искомым признаком; n о– общее количество органов управления.
Среднеквадратическая ошибка
воздействий ЛПР на орган
управления:
0, 0074 D,
м
(4)
где D – амплитуда целенаправленного
движения, мм.
Вероятность безошибочного
выполнения ЛПР набора
действий :
r
1 p j k j
Pб.наб e j 1
, (5)
где r – количество различных видов
невзаимосвязанных действий
в наборе;
k j – количество выполненных
действий j-го вида в рамках
набора;
6.
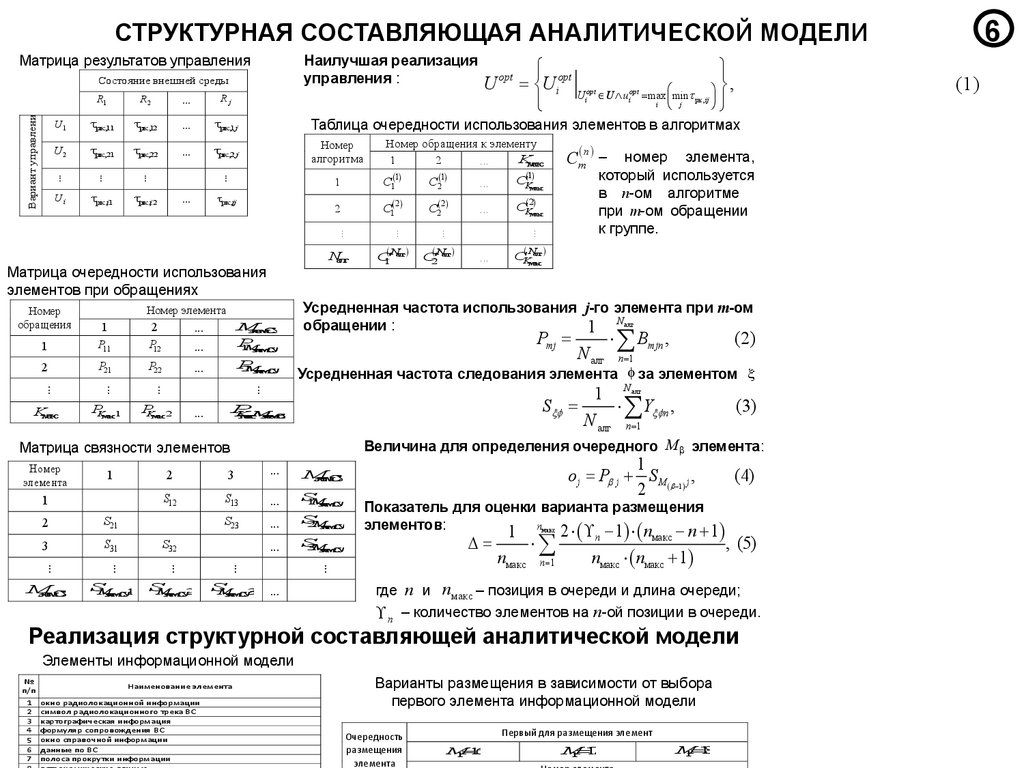
6СТРУКТУРНАЯ СОСТАВЛЯЮЩАЯ АНАЛИТИЧЕСКОЙ МОДЕЛИ
Матрица результатов управления
Наилучшая реализация
управления :
U opt U opt
i
,
R2
...
Rj
U1
рк,11
рк,12
...
рк,1j
Таблица очередности использования элементов в алгоритмах
U2
рк,21
рк,22
...
рк,2j
Номер
алгоритма
...
...
(1)
R1
...
U iopt U uiopt max min рк ,ij
i j
...
1
C1
1
C2
...
Ui
рк,i1
рк,i2
CK
макс
2
C1
C2
...
CK
макс
...
алг
CK
макс
Номер
обращения
Номер элемента
2
P21
P22
...
P
2
M
э
л
е
м
.С
У
Kмакс
P
Kмакс1
P
Kмакс2
алг
C
1
C2 алг
...
S31
M
э
л
е
м
.С
У
...
M
э
л
е
м
.С
У
S12
S13
...
S
1
M
э
л
е
м
.С
У
S23
...
S
2
M
э
л
е
м
.С
У
...
S
3
M
э
л
е
м
.С
У
S
S
M
1
M
2
э
л
е
м
.С
У
э
л
е
м
.С
У
S
M
3
э
л
е
м
.С
У
(2)
n 1
(3)
Величина для определения очередного M элемента:
3
S32
Bmjn ,
1 Nалг
S
Y n ,
N алг n 1
...
1
o j P j S M 1 j ,
2
(4)
n макс
nмакс nмакс 1
, (5)
Показатель для оценки варианта размещения
nмакс
элементов:
2 1 n n 1
...
3
...
S21
...
2
N алг
Усредненная частота следования элемента за элементом :
P
K
M
м
а
к
с
э
л
е
м
.
С
У
...
1
N
Pmj
2
...
1
N
2
Усредненная частота использования j-го элемента при m-ом
обращении :
1 Nалг
Матрица связности элементов
Номер
элемента
N
который используется
в n-ом алгоритме
при m-ом обращении
к группе.
...
Nалг
n
Cm – номер элемента,
1
...
M
э
л
е
м
.С
У
P
1
M
э
л
е
м
.С
У
...
...
...
2
P12
...
1
P11
...
1
2
...
Матрица очередности использования
элементов при обращениях
2
1
...
рк,ij
...
Номер обращения к элементу
Kмакс
1
2
...
...
Вариант управления
Состояние внешней среды
1
nмакс
n 1
где n и nмакс – позиция в очереди и длина очереди;
n – количество элементов на n-ой позиции в очереди.
Реализация структурной составляющей аналитической модели
Элементы информационной модели
№
п/п
1
2
3
4
5
6
7
Наименование элемента
окно радиолокационной информации
символ радиолокационного трека ВС
картографическая информация
формуляр сопровождения ВС
окно справочной информации
данные по ВС
полоса прокрутки информации
Варианты размещения в зависимости от выбора
первого элемента информационной модели
Очередность
размещения
элемента
Первый для размещения элемент
М
1
6
1
М
1
7
1
М
1
8
1
7.
8.
9.
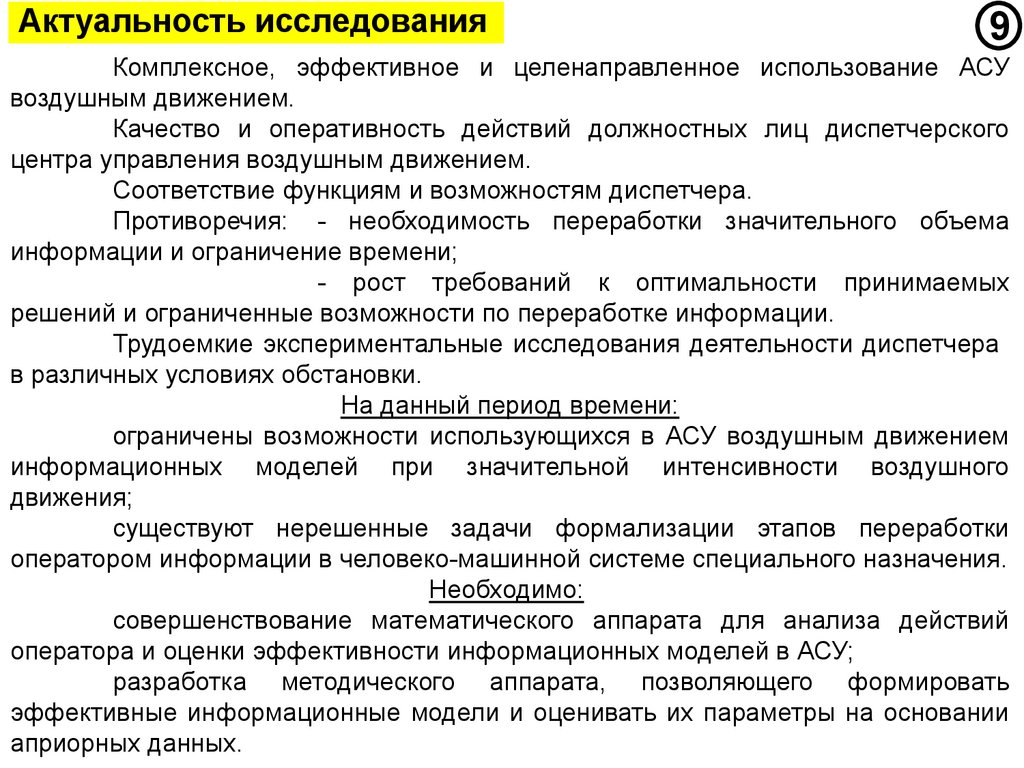
Актуальность исследования9
Комплексное, эффективное и целенаправленное использование АСУ
воздушным движением.
Качество и оперативность действий должностных лиц диспетчерского
центра управления воздушным движением.
Соответствие функциям и возможностям диспетчера.
Противоречия: - необходимость переработки значительного объема
информации и ограничение времени;
- рост требований к оптимальности принимаемых
решений и ограниченные возможности по переработке информации.
Трудоемкие экспериментальные исследования деятельности диспетчера
в различных условиях обстановки.
На данный период времени:
ограничены возможности использующихся в АСУ воздушным движением
информационных моделей при значительной интенсивности воздушного
движения;
существуют нерешенные задачи формализации этапов переработки
оператором информации в человеко-машинной системе специального назначения.
Необходимо:
совершенствование математического аппарата для анализа действий
оператора и оценки эффективности информационных моделей в АСУ;
разработка методического аппарата, позволяющего формировать
эффективные информационные модели и оценивать их параметры на основании
априорных данных.
10.
Перспектива роста воздушного движенияЕВРОКОНТРОЛЬ
ИКАО
1
0
ИАТА
11.
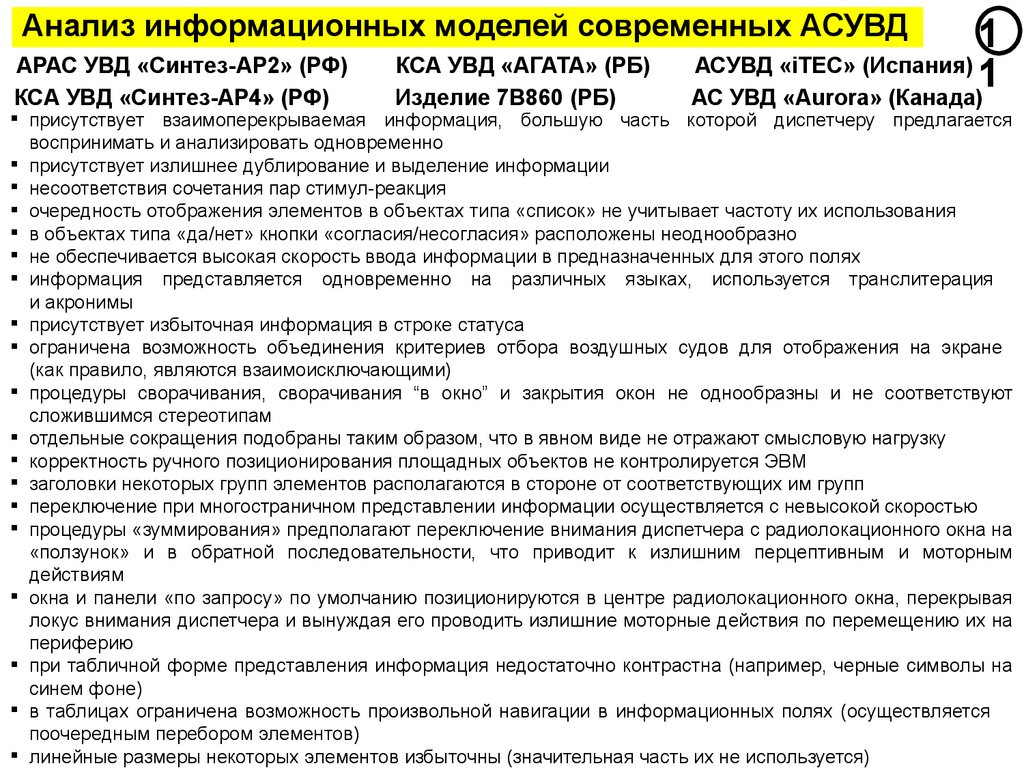
Анализ информационных моделей современных АСУВДАРАС УВД «Синтез-АР2» (РФ)
КСА УВД «Синтез-АР4» (РФ)
КСА УВД «АГАТА» (РБ)
Изделие 7В860 (РБ)
1
АСУВД «iTEC» (Испания)
1
АС УВД «Aurora» (Канада)
присутствует взаимоперекрываемая информация, большую часть которой диспетчеру предлагается
воспринимать и анализировать одновременно
присутствует излишнее дублирование и выделение информации
несоответствия сочетания пар стимул-реакция
очередность отображения элементов в объектах типа «список» не учитывает частоту их использования
в объектах типа «да/нет» кнопки «согласия/несогласия» расположены неоднообразно
не обеспечивается высокая скорость ввода информации в предназначенных для этого полях
информация представляется одновременно на различных языках, используется транслитерация
и акронимы
присутствует избыточная информация в строке статуса
ограничена возможность объединения критериев отбора воздушных судов для отображения на экране
(как правило, являются взаимоисключающими)
процедуры сворачивания, сворачивания “в окно” и закрытия окон не однообразны и не соответствуют
сложившимся стереотипам
отдельные сокращения подобраны таким образом, что в явном виде не отражают смысловую нагрузку
корректность ручного позиционирования площадных объектов не контролируется ЭВМ
заголовки некоторых групп элементов располагаются в стороне от соответствующих им групп
переключение при многостраничном представлении информации осуществляется с невысокой скоростью
процедуры «зуммирования» предполагают переключение внимания диспетчера с радиолокационного окна на
«ползунок» и в обратной последовательности, что приводит к излишним перцептивным и моторным
действиям
окна и панели «по запросу» по умолчанию позиционируются в центре радиолокационного окна, перекрывая
локус внимания диспетчера и вынуждая его проводить излишние моторные действия по перемещению их на
периферию
при табличной форме представления информация недостаточно контрастна (например, черные символы на
синем фоне)
в таблицах ограничена возможность произвольной навигации в информационных полях (осуществляется
поочередным перебором элементов)
линейные размеры некоторых элементов избыточны (значительная часть их не используется)
12.
Цель и задачиисследования
Цель диссертационной
1
эффективности
2
работы – повышение
деятельности диспетчера на автоматизированном рабочем месте районного
диспетчерского центра при выполнении функций по руководству потоками
воздушных судов за счет использования усовершенствованной информационной
модели обстановки.
Задачи:
1._Анализ информационных моделей обстановки на автоматизированном
рабочем месте диспетчера в АСУ воздушным движением и методов
их построения с учетом особенностей руководства потоками воздушных судов
в условиях увеличения интенсивности воздушного движения.
2._Разработка
аналитической
модели
взаимодействия
диспетчера
с автоматизированным рабочим местом с учетом пропускной способности
диспетчера и точности его деятельности.
3._Разработка алгоритма структурно-параметрического синтеза информационной
модели обстановки на автоматизированном рабочем месте диспетчера
в АСУ воздушным движением, использование которого позволяет создать
эффективную информационную модель.
4._Синтез информационной модели, проверка адекватности и эффективности.
Объект исследования – информационная модель обстановки
на автоматизированном рабочем месте диспетчера в АСУ воздушным движением.
Предмет исследования – научно-методический аппарат формирования
информационной модели.
13.
Положения выносимые на защиту1
1. Аналитическая модель взаимодействия диспетчера с автоматизированным рабочим
3
местом, отличающаяся учетом структурных особенностей системы управления, точности
реализации и временных характеристик режима управления, позволяющая проводить численную
оценку эффективности отображения информации, а также предъявлять требования
к информационной модели по безошибочности и оперативности деятельности диспетчера.
2. Алгоритм структурно-параметрического синтеза информационной модели обстановки
на автоматизированном рабочем месте диспетчера в АСУ воздушным движением, отличающийся
использованием: метода построения дерева событий при формировании структуры
информационной
модели;
аналитической
модели
взаимодействия
диспетчера
с автоматизированным рабочим местом; многофакторного показателя качества деятельности
диспетчера, что позволяет в результате использования алгоритма повысить эффективность
деятельности диспетчера по времени выполнения действий не менее чем на 16 %, по точности
выполнения действий не менее чем на 49 %, с доверительной вероятностью 0,95 и относительной
погрешностью 10 %, а также по усредненной по определенному набору действий вероятности
безошибочной деятельности диспетчера не менее чем в 4 раза.
3. Многофакторный показатель качества деятельности человека-оператора,
отличающийся инвариантностью к назначению, целям, решаемым задачам и сложности
эргатической системы, позволяющий решать двухкритериальную задачу оценки эффективности
информационной модели по временной и точностной составляющим, а также наглядно
характеризовать эффективность последней.
Соответствие диссертации специальности
Пункт №3 (Критерии, модели описания и оценки эффективности решения задач
системного анализа, оптимизации, управления, принятия решений и обработки информации).
Пункт
№7 (Методы
и
алгоритмы
структурно-параметрического
синтеза
и идентификации сложных систем).
14.
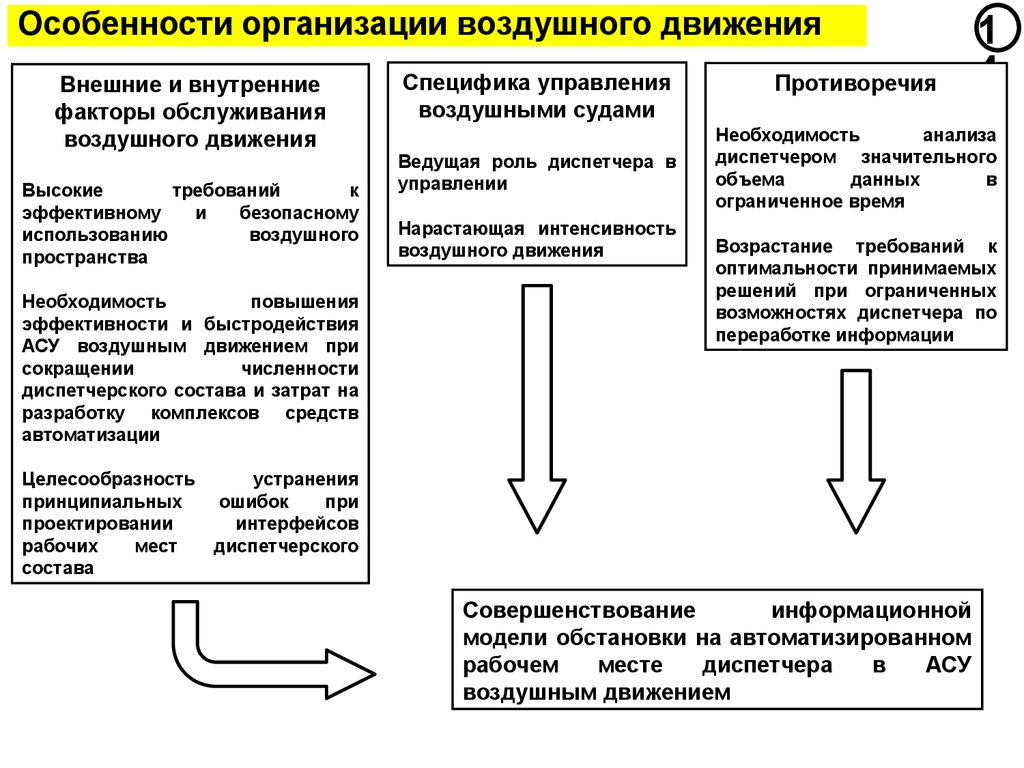
Особенности организации воздушного движенияВнешние и внутренние
факторы обслуживания
воздушного движения
Высокие
требований
к
эффективному
и
безопасному
использованию
воздушного
пространства
Необходимость
повышения
эффективности и быстродействия
АСУ воздушным движением при
сокращении
численности
диспетчерского состава и затрат на
разработку комплексов средств
автоматизации
Целесообразность
принципиальных
проектировании
рабочих
мест
состава
Специфика управления
воздушными судами
Ведущая роль диспетчера в
управлении
Нарастающая интенсивность
воздушного движения
Противоречия
1
4
Необходимость
анализа
диспетчером значительного
объема
данных
в
ограниченное время
Возрастание требований к
оптимальности принимаемых
решений при ограниченных
возможностях диспетчера по
переработке информации
устранения
ошибок
при
интерфейсов
диспетчерского
Совершенствование
информационной
модели обстановки на автоматизированном
рабочем
месте
диспетчера
в
АСУ
воздушным движением
15.
Условия деятельности диспетчера1
5
Структура
района
воздушного движения
обслуживания
Особенности обслуживания
пространства
воздушного
Уровень технического оснащения
Особенности полетов и ограничения
использования воздушного пространства
Количество пунктов передачи управления
воздушных судов на границах сектора
ответственности
Количество
маршрутов
и
пересечения воздушных трасс
Упорядоченность
судов
потоков
Метеорологическая обстановка
Экстренные ситуации
точек
воздушных
16.
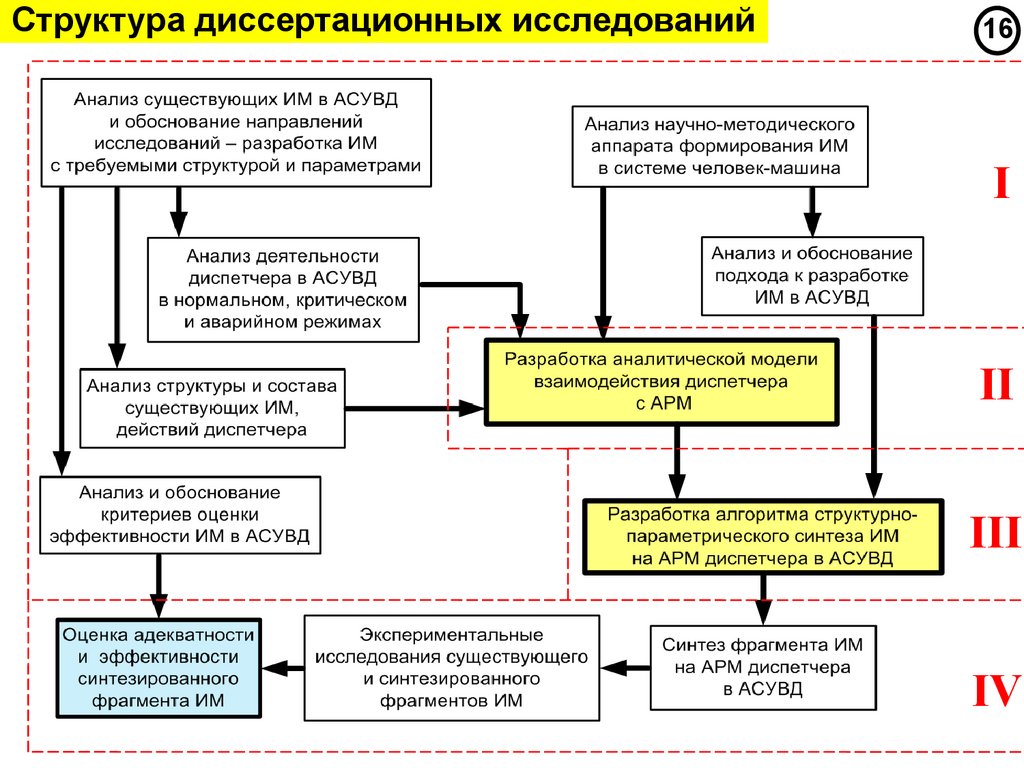
Структура диссертационных исследований16
I
II
III
IV
17.
Роль и место аналитической модели взаимодействиядиспетчера с автоматизированным рабочим местом
17
18.
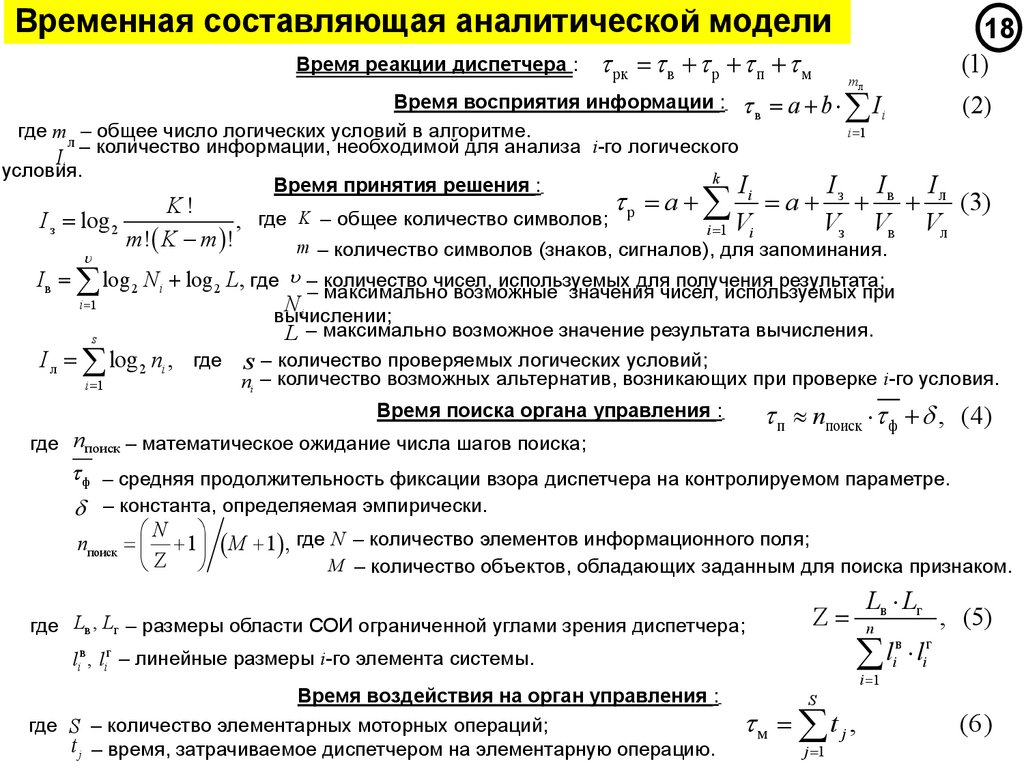
Временная составляющая аналитической моделиВремя реакции диспетчера :
рк в р п м
18
Время восприятия информации : a b
Ii
в
i 1
где m л – общее число логических условий в алгоритме.
– количество информации, необходимой для анализа i-го логического
Ii
условия.
k
Время принятия решения :
Ii
Iз Iв
I з log 2
р a
(1)
mл
a
K!
, где K – общее количество символов;
Vз Vв
i 1 Vi
m ! K m !
m – количество символов (знаков, сигналов), для запоминания.
(2)
Iл
(3)
Vл
I в log 2 N i log 2 L, где – количество чисел, используемых для получения результата;
– максимально возможные значения чисел, используемых при
i 1
N
i
вычислении;
s
L – максимально возможное значение результата вычисления.
I л log 2 ni , где s – количество проверяемых логических условий;
i 1
ni – количество возможных альтернатив, возникающих при проверке i-го условия.
п nпоиск ф , (4)
Время поиска органа управления :
где nпоиск – математическое ожидание числа шагов поиска;
ф – средняя продолжительность фиксации взора диспетчера на контролируемом параметре.
– константа, определяемая эмпирически.
N
nпоиск 1 M 1 , где N – количество элементов информационного поля;
M – количество объектов, обладающих заданным для поиска признаком.
где Lв , Lг – размеры области СОИ ограниченной углами зрения диспетчера;
liв , liг – линейные размеры i-го элемента системы.
Время воздействия на орган управления :
где S – количество элементарных моторных операций;
t j – время, затрачиваемое диспетчером на элементарную операцию.
L L
n в г , (5)
в
г
l
l
i i
i 1
S
м t j ,
j 1
(6)
19.
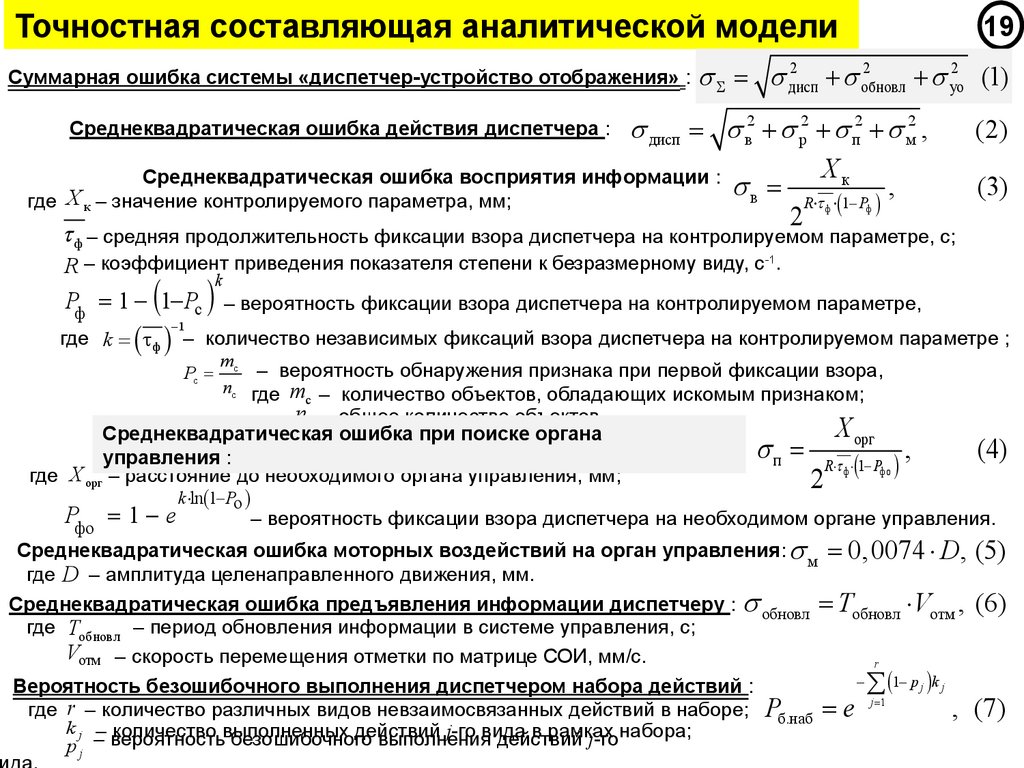
Точностная составляющая аналитической моделиСуммарная ошибка системы «диспетчер-устройство отображения» :
19
2
2
дисп
обновл
уо2 (1)
дисп в2 р2 п2 м2 ,
Xк
Среднеквадратическая ошибка восприятия информации :
,
в
где X к – значение контролируемого параметра, мм;
R ф 1 Pф
2
Среднеквадратическая ошибка действия диспетчера :
(2)
(3)
ф – средняя продолжительность фиксации взора диспетчера на контролируемом параметре, с;
R – коэффициент приведения показателя степени к безразмерному виду, с-1.
k
Pф 1 1 Pc – вероятность фиксации взора диспетчера на контролируемом параметре,
– количество независимых фиксаций взора диспетчера на контролируемом параметре ;
где k ф
1
Pc
mc
– вероятность обнаружения признака при первой фиксации взора,
nc где m – количество объектов, обладающих искомым признаком;
c
nc – общее количество объектов.
Среднеквадратическая ошибка при поиске органа
управления :
где Х орг – расстояние до необходимого органа управления, мм;
Pфо 1 е
k ln 1 Pо
Х орг
п R 1 P ,
2 ф фо
(4)
– вероятность фиксации взора диспетчера на необходимом органе управления.
Среднеквадратическая ошибка моторных воздействий на орган управления: м 0, 0074 D, (5)
где D – амплитуда целенаправленного движения, мм.
Среднеквадратическая ошибка предъявления информации диспетчеру : обновл Tобновл Vотм , (6)
где Tобновл – период обновления информации в системе управления, с;
Vотм – скорость перемещения отметки по матрице СОИ, мм/с.
r
1 p j k j
Вероятность безошибочного выполнения диспетчером набора действий :
j 1
где r – количество различных видов невзаимосвязанных действий в наборе; Pб.наб e
, (7)
k j – количество выполненных действий j-го вида в рамках набора;
p – вероятность безошибочного выполнения действий j-го
j
20.
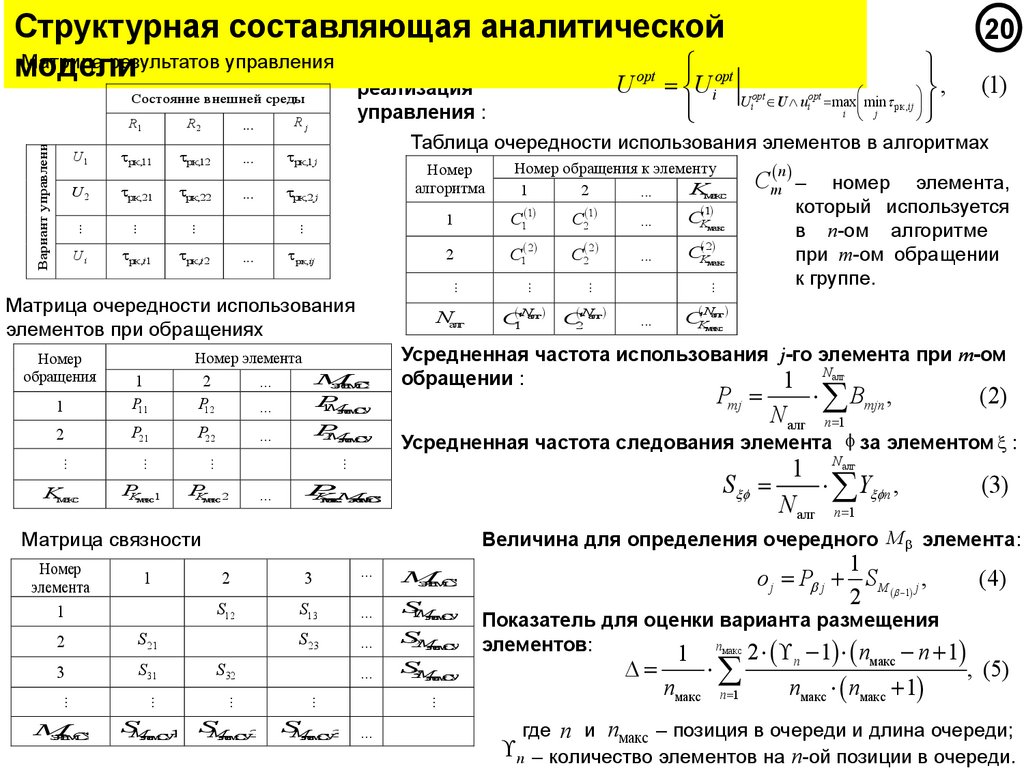
Структурная составляющая аналитическойМатрица результатов управления Наилучшая
opt
модели
opt
...
рк,1j
U2
рк,21
рк,22
...
рк,2j
...
рк,ij
Ui
рк,i1
рк,i2
Номер элемента
P22
...
P
2
M
э
л
е
м
.С
У
P
Kмакс1
P
Kмакс2
Nалг
алг
C
1
C2 алг
1
...
(2)
n 1
1 Nалг
S
Y n ,
N алг n 1
3
...
M
э
л
е
м
.С
У
S12
S13
...
S
1
M
э
л
е
м
.С
У
S23
...
S
2
M
э
л
е
м
.С
У
...
S
3
M
э
л
е
м
.С
У
S32
...
S31
N алг
Bmjn ,
Усредненная частота следования элемента за элементом :
2
...
3
N
(3)
Величина для определения очередного M элемента:
...
S21
алг
CK
макс
P
K
M
м
а
к
с
э
л
е
м
.
С
У
...
2
...
Pmj
M
э
л
е
м
.С
У
S
M
1
э
л
е
м
.С
У
S
M
2
э
л
е
м
.С
У
S
M
3
э
л
е
м
.С
У
...
1
N
Усредненная частота использования j-го элемента при m-ом
обращении :
1 Nалг
Матрица связности
Номер
элемента
N
...
P21
...
2
...
...
M
э
л
е
м
.С
У
P
1
M
э
л
е
м
.С
У
...
2
P12
...
1
1
P11
Kмакс
(1)
Таблица очередности использования элементов в алгоритмах
Номер обращения к элементу
Номер
n
C
номер элемента,
алгоритма
m –
Kмакс
1
2
...
который используется
1
1
1
CK
1
C1
C2
...
макс
в n-ом алгоритме
2
2
2
CKмакс
2
C1
C2
при m-ом обращении
...
к группе.
Матрица очередности использования
элементов при обращениях
Номер
обращения
,
U iopt U uiopt max min рк ,ij
i j
...
рк,12
...
рк,11
...
U1
...
Rj
...
...
...
R2
...
R1
...
Вариант управления
Состояние внешней среды
U i
U
реализация
управления :
20
...
1
o j P j S M 1 j ,
2
(4)
n макс
nмакс nмакс 1
, (5)
Показатель для оценки варианта размещения
nмакс
элементов:
2 1 n n 1
1
nмакс
n 1
где n и nмакс – позиция в очереди и длина очереди;
n – количество элементов на n-ой позиции в очереди.
21.
Обобщенная структура алгоритма синтезаинформационной модели на автоматизированном
рабочем месте диспетчера
Определение
иерархии
и опорной
структуры ИМ
1
2
Корректирование
структуры ИМ
нет
Определение
параметров
ИМ
3
нет
4
Проверка
да
соответствия
параметров ИМ
заданными
Создание
динамической
ИМ
5
6
Проверка
адекватности
ИМ
да
7
да
Проверка
эффективности
ИМ
8
Реализация
рекомендаций экспертов и
вспомогательных
возможностей
информационных технологий
нет
Результирующая
ИМ
21
22.
Определение иерархиии опорной структуры
информационной модели
22
Анализ и выбор способов
обеспечения выполнения
операций
Составление перечня
операций для реализации
диспетчером
Изменение
операций
Сравнение необходимого и
ожидаемого качества выполнения
операций диспетчером
Предварительное
распределение операций
между элементами ИМ
Оценка ожидаемого качества
выполнения оставшихся
операций диспетчером
Составление перечня
операций, определенных
каждому элементу ИМ
Составление перечня
оставшихся операций
Составление перечня операций
нераспределенных между
элементами ИМ
ВНЕШНЯЯ СРЕДА
ТАБЛИЦА
ПАНЕЛЬ
ИНСТРУМЕНТОВ
МЕНЮ
Панель
Контекстное
пиктограмм
Мастерменю
операций
Мастер
операций
Панель
Контекстное
пиктограмм
Мастерменю
операций
5
4
Командная
кнопка
Контекстное
меню
Кнопка
Панель
пиктограмм
Полоса
прокрутки
Радиокнопка
Выпадающий
список
Приглашение
Текстовое
поле
Поле
ввода
Выделение
операций для
реализации
машиной
Всплывающая
подсказка
Оптимальное
количество уровней
управления
0
2
Анализ и выбор способов обеспечения
выполнения операций
требующих изменения
Составление
алгоритмов
управления
10
Определение
количества
уровней
управления
0,1
0,2
0,3
0,4
0,5
0,6
0,7
0,8
0,9
Скорость изменения внешней среды,
элемент
ед.врем.
Определение
функций
управления
4
Составление перечня операций,
требующих изменения содержания или
компоновки элементов ИМ
3
Оценка необходимого
качества выполнения
алгоритмов
5
5
Составление перечня операций,
выполнение которых в представленном
виде невозможно машиной и диспетчером
5
4
Изменение
операций
1
Составление перечня
операций реализуемых
каждым элементом ИМ
Прототипирование
статических
отображений
-назначение АСУ, условия и режимы использования
-результаты анализа вариантов распределения функций между машиной и оператором в аналогичных системах
-возможности машины по выполнению типовых операций и действий
-общие эргономические требования к процессам, средствам и условиям деятельности человека-оператора
-возможности оператора по выполнению типовых операций
23.
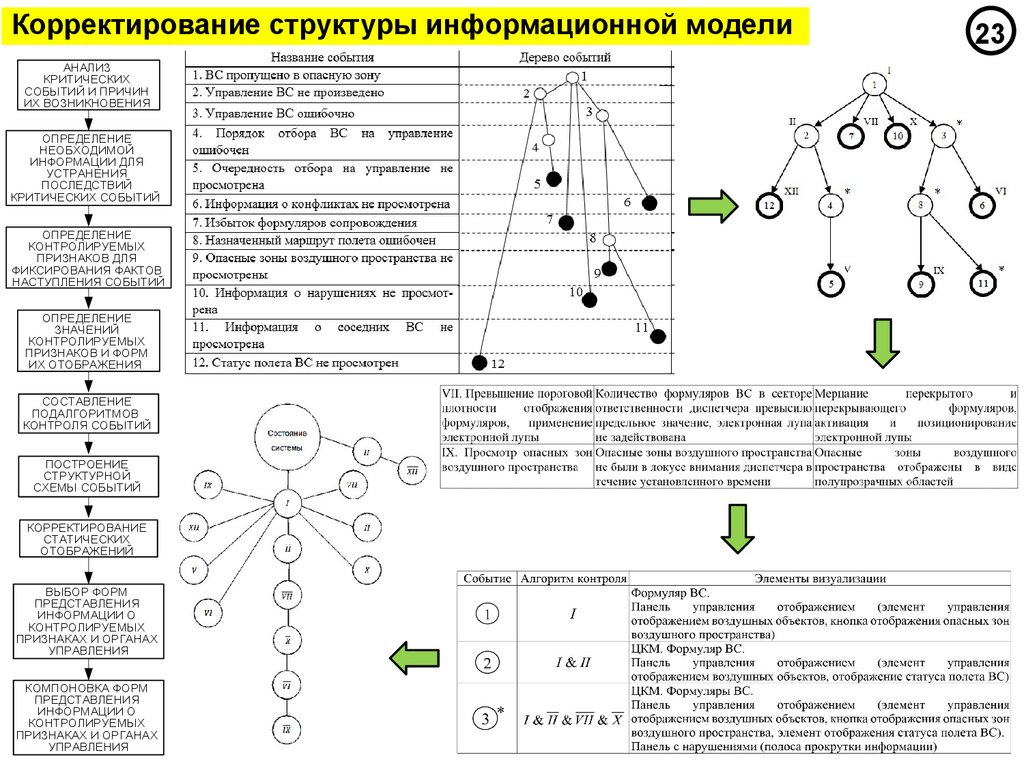
Корректирование структуры информационной моделиАНАЛИЗ
КРИТИЧЕСКИХ
СОБЫТИЙ И ПРИЧИН
ИХ ВОЗНИКНОВЕНИЯ
ОПРЕДЕЛЕНИЕ
НЕОБХОДИМОЙ
ИНФОРМАЦИИ ДЛЯ
УСТРАНЕНИЯ
ПОСЛЕДСТВИЙ
КРИТИЧЕСКИХ СОБЫТИЙ
ОПРЕДЕЛЕНИЕ
КОНТРОЛИРУЕМЫХ
ПРИЗНАКОВ ДЛЯ
ФИКСИРОВАНИЯ ФАКТОВ
НАСТУПЛЕНИЯ СОБЫТИЙ
ОПРЕДЕЛЕНИЕ
ЗНАЧЕНИЙ
КОНТРОЛИРУЕМЫХ
ПРИЗНАКОВ И ФОРМ
ИХ ОТОБРАЖЕНИЯ
СОСТАВЛЕНИЕ
ПОДАЛГОРИТМОВ
КОНТРОЛЯ СОБЫТИЙ
ПОСТРОЕНИЕ
СТРУКТУРНОЙ
СХЕМЫ СОБЫТИЙ
КОРРЕКТИРОВАНИЕ
СТАТИЧЕСКИХ
ОТОБРАЖЕНИЙ
ВЫБОР ФОРМ
ПРЕДСТАВЛЕНИЯ
ИНФОРМАЦИИ О
КОНТРОЛИРУЕМЫХ
ПРИЗНАКАХ И ОРГАНАХ
УПРАВЛЕНИЯ
КОМПОНОВКА ФОРМ
ПРЕДСТАВЛЕНИЯ
ИНФОРМАЦИИ О
КОНТРОЛИРУЕМЫХ
ПРИЗНАКАХ И ОРГАНАХ
УПРАВЛЕНИЯ
23
24.
Алгоритм структурнопараметрическогосинтеза
информационной
модели на
автоматизированном
рабочем месте
диспетчера АСУ
воздушным движением
ОПРЕДЕЛЕНИЕ
МАКСИМАЛЬНОГО КОЛИЧЕСТВА
ОДНОВРЕМЕННО
ОБРАБАТЫВАЕМЫХ СОБЫТИЙ
ОПРЕДЕЛЕНИЕ ПАРАМЕТРОВ
ИНФОРМАЦИОННОЙ МОДЕЛИ
ОПРЕДЕЛЕНИЕ КОЛИЧЕСТВА
ИНФОРМАЦИИ СОДЕРЖАЩЕЙСЯ
В ОДНОВРЕМЕННО
ОБРАБАТЫВАЕМЫХ СОБЫТИЯХ
ОПРЕДЕЛЕНИЕ
ФАКТИЧЕСКОЙ
ТОЧНОСТИ
ОБРАБОТКИ
СОБЫТИЙ
ОПРЕДЕЛЕНИЕ
ВРЕМЕНИ
ЗАТРАЧИВАЕМОГО
НА ОБРАБОТКУ
СОБЫТИЙ
НЕТ
ОПРЕДЕЛЕНИЕ
ДОПУСТИМОЙ
ТОЧНОСТИ
ОБРАБОТКИ
СОБЫТИЙ
n
τ рк рк.треб τ мi
i 1
n
2
2
доп мi
НЕТ
i 1
ДА
ДА
ОПРЕДЕЛЕНИЕ ИЕРАРХИИ
И ОПОРНОЙ СТРУКТУРЫ
ИНФОРМАЦИОННОЙ
МОДЕЛИ ОБСТАНОВКИ
СОЗДАНИЕ ДИНАМИЧЕСКОЙ ИНФОРМАЦИОННОЙ МОДЕЛИ
НЕТ
КОРРЕКТИРОВАНИЕ СТРУКТУРЫ
ИНФОРМАЦИОННОЙ МОДЕЛИ
РЕАЛИЗАЦИЯ
ВСПОМОГАТЕЛЬНЫХ
ВОЗДЕЙСТВИЙ СО
СТОРОНЫ ЭВМ
модель
адекватна
ВЫПОЛНЕНИЕ
РЕКОМЕНДАЦИЙ
ЭКСПЕРТОВ И
СПЕЦИАЛИСТОВ
ДА
модель
эффективна
ДА
НЕТ
РЕЗУЛЬТИРУЮЩАЯ
ИНФОРМАЦИОННАЯ МОДЕЛЬ
24
25.
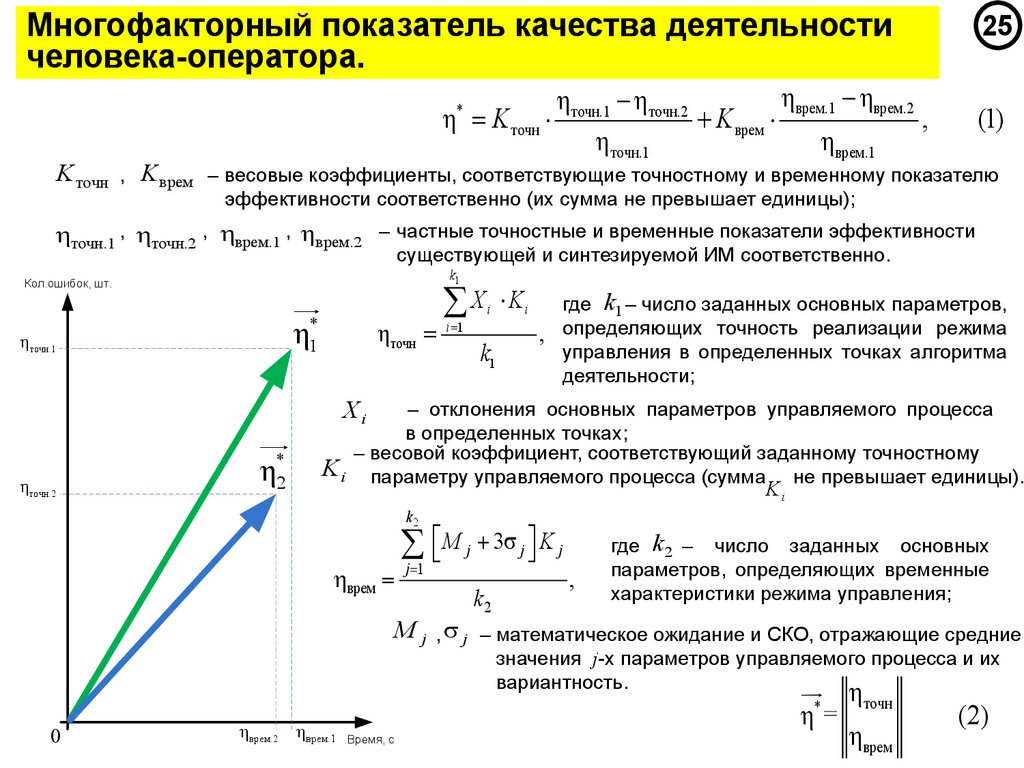
Многофакторный показатель качества деятельностичеловека-оператора.
25
ηврем.1 ηврем.2
ηточн.1 ηточн.2
η K точн
K врем
,
ηточн.1
ηврем.1
*
(1)
K точн , K врем – весовые коэффициенты, соответствующие точностному и временному показателю
эффективности соответственно (их сумма не превышает единицы);
точн.1 , точн.2 , врем.1 , врем.2 – частные точностные и временные показатели эффективности
существующей и синтезируемой ИМ соответственно.
ηточн.1
ηточн.2
k1
X K
η1*
Кол.ошибок, шт.
η*2
ηточн i 1
i
k1
i
,
где k1 – число заданных основных параметров,
определяющих точность реализации режима
управления в определенных точках алгоритма
деятельности;
Xi
– отклонения основных параметров управляемого процесса
в определенных точках;
– весовой коэффициент, соответствующий заданному точностному
K i параметру управляемого процесса (сумма не превышает единицы).
Ki
k2
M j 3 j K j
врем j 1
k2
,
где k2 – число заданных основных
параметров, определяющих временные
характеристики режима управления;
M j , j – математическое ожидание и СКО, отражающие средние
значения j-х параметров управляемого процесса и их
вариантность.
*
0
ηврем.2 ηврем.1 Время, с
η=
ηточн
ηврем
(2)
26.
Экспериментальное исследование26
Цель
Проверка адекватности и оценка эффективности синтезированного
информационной модели.
Задачи
фрагмента
Полунатурное моделирование деятельности диспетчера, в рамках прямого метода
проверки, с использованием синтезированного и существующего фрагментов
информационной модели обстановки.
Сравнение средних значений и дисперсий откликов с целью проверки гипотез о близости
средних и о согласованности дисперсий синтезированного и существующего фрагментов
информационной модели в нормальном режиме деятельности диспетчера.
Сравнение средних значений откликов и количества допущенных ошибок в критическом
режиме деятельности диспетчера.
Необходимые условия
Полунатурное воспроизведение, при помощи синтезированного и существующего
фрагментов информационной модели, условий использования автоматизированного
рабочего места диспетчером в основных ситуациях, предусмотренных его должностными
обязанностями.
Проведение необходимого количество итераций для обеспечения требуемых значений
доверительной вероятности и относительной погрешности. Регистрация результатов.
Контроль над адекватностью функционирования синтезированного и существующего
фрагментов информационной модели при моделировании различных ситуаций. Контроль
условий моделирования и однородности получаемой выборки результатов.
Автоматизированная обработка всей зарегистрированной в процессе полунатурного
моделирования информации о контролируемых параметрах.
27.
Схема эксперимента, проверка адекватностиУНИФИЦИРОВАННЫЙ
ТЕСТОВЫЙ МАТЕРИАЛ
речевые
команды
ЭКСПЕРТЫ И
СПЕЦИАЛИСТЫ
27
ФРАГМЕНТ СУЩЕСТВУЮЩЕЙ
ИНФОРМАЦИОННОЙ МОДЕЛИ
поиск информации,
принятие решения,
поиск органа управления,
моторное действие
время
выполнения,
допущенные
ошибки
ПРОГРАММА
ОБРАБОТКИ
СТАТИСТИЧЕСКИХ
ДАННЫХ
ФРАГМЕНТ СИНТЕЗИРОВАННОЙ
ИНФОРМАЦИОННОЙ МОДЕЛИ
Частоты попадания данных в интервалы временных значений
Частота
50
45
40
для существующего
фрагмента
информационной модели
35
30
25
20
15
10
5
0
1
3
5
7
9
11
13
15
17
19
21
23
25
27
29
31
33
35
37
39
41
43
45
47
49
51
53
55
57
59
61
63
65
Время, с
Частота
55
50
45
40
для синтезированного
фрагмента
информационной модели
35
30
25
20
15
10
5
0
1
3
5
7
9
11
13
15
17
19
21
23
25
27
29
31
33
35
37
39
41
43
45
47
49
51
53
55
57
59
61
63
65
Время, с
Зона неопределенности
0, 05
0, 01
χ 81, 381
χ 90,802
Зона незначимости
1
0
Зона значимости
Уровень значимости
χ 23,974
2
2
2
Значение критерия
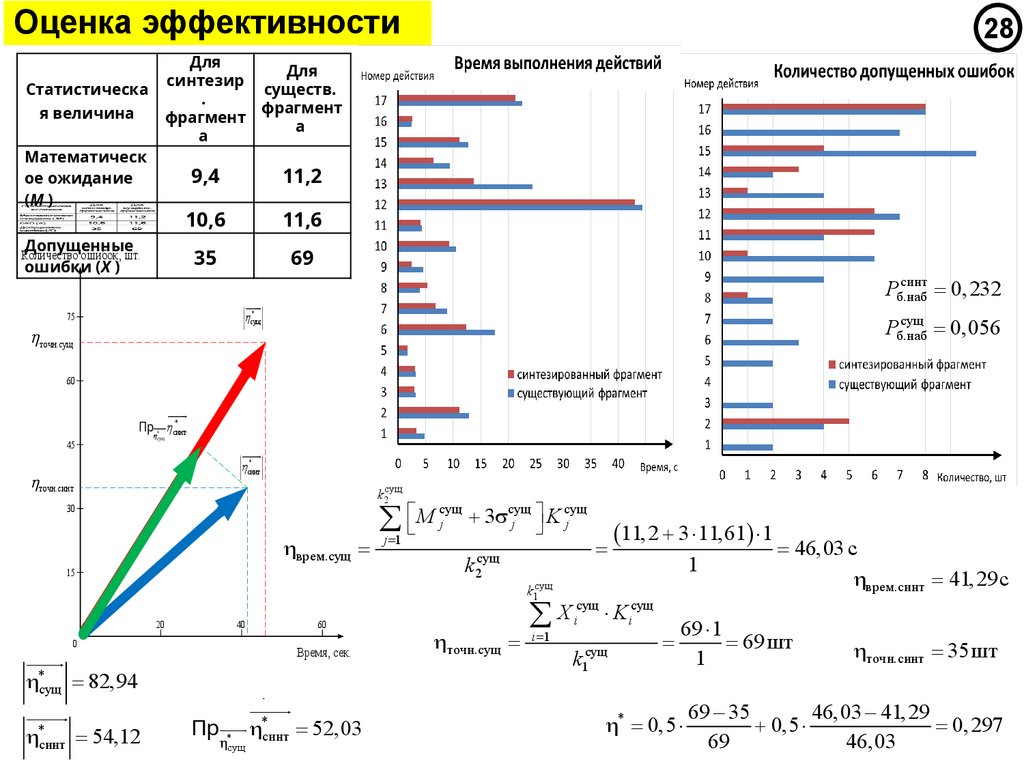
28.
Оценка эффективностиСтатистическа
я величина
Для
синтезир
.
фрагмент
а
Для
существ.
фрагмент
а
9,4
11,2
10,6
11,6
35
69
Математическ
ое ожидание
(М )
Допущенные
ошибки (Х )
Количество ошибок, шт.
28
синт
Pб.наб
0,232
*
сущ
75
точн.сущ
сущ
Pб.наб
0,056
60
*
Пр
синт
*
45
сущ
*
синт
точн.синт
k2сущ
30
врем.сущ
сущ
3 сущ
M сущ
j
j Kj
11,2 3 11,61 1 46,03 с
j 1
15
20
60
40
0
*синт 54,12
Время, сек.
врем.сущ
врем.синт
*сущ 82,94
*
Пр
52,03
*
сущ синт
k2сущ
1
k1сущ
X iсущ Kiсущ
точн.сущ i 1
k1сущ
69 1
69шт
1
* 0,5
врем.синт 41, 29с
точн.синт 35шт
69 35
46,03 41, 29
0,5
0,297
69
46,03
29.
Основные научные результаты диссертации1.
29
Проведен анализ информационных моделей обстановки
на автоматизированном рабочем месте диспетчера в современных АСУ воздушным
движением, подходов и методов построения, критериев их оценки. Выявлены
факторы, оказывающие существенное влияние на процесс управления сложной
системой в современных условиях дефицита времени и высокой стоимости ошибки
и не учитываемые ранее при проектировании. Обоснован подход
к разработке информационной модели и критерий оценки ее эффективности.
2.
Проведен анализ методов математического моделирования процесса
взаимодействия человека-оператора с автоматизированным рабочим местом
в условиях дефицита времени и высокой стоимости ошибки. Разработана
аналитическая модель взаимодействия диспетчера с автоматизированным рабочим
местом, позволяющая количественно анализировать деятельность диспетчера
с учетом определенного варианта построения информационной модели,
предъявлять
требования
к
пропускной
способности
и
точности
деятельности диспетчера, проводить оценку эффективности отображения
информации на основании априорных данных.
3.
Разработан алгоритм структурно-параметрического синтеза информационной
модели обстановки на автоматизированном рабочем месте диспетчера в АСУ
воздушным движением, использование которого позволяет формировать
информационную модель со структурой и параметрами, повышающими
эффективность деятельности диспетчера в сравнении с существующими
информационными моделями, по времени выполнения действий не менее
чем на 16 %, безошибочности выполнения действий не менее чем на 49 %, а также
по усредненной по всему набору действий вероятности безошибочной
деятельности не менее чем в 4 раза.
30.
Практическая значимость полученных результатов30
1._Разработанная аналитическая модель взаимодействия диспетчера
с
автоматизированным
рабочим
местом
способствует
повышению
эффективности учета человеческого фактора, оказывающего существенное
влияние на процесс управления в условиях дефицита времени и высокой
стоимости ошибки в АСУ специального назначения (для управления
экологически опасными объектами, обеспечения ликвидации последствий
чрезвычайных ситуаций, станций скорой медицинской помощи, транспортных
задач, военных целей и пр.).
2._Использование алгоритма синтеза при разработке информационных моделей
обстановки на автоматизированных рабочих местах в АСУ воздушным
движением, позволит повысить эффективность деятельности диспетчерского
персонала в условиях современной интенсивности воздушного движения.
3._Результаты
исследований,
позволят
сократить
объем
трудоемких
экспериментальных
исследований,
связанных
с
многовариантностью
деятельности диспетчера при разработке информационных моделей
на автоматизированных рабочих местах в АСУ воздушным движением.
4._Результаты
исследований,
включающие
оценку
эффективности
информационной
модели,
позволят
оценивать
и
совершенствовать
информационные модели в существующих АСУ специального назначения.
31.
Связь с крупными научными программами и темами31
«Обоснование облика элементов системы вооружения с учетом
особенностей
сетецентрических
подходов
к
военным
действиям»
(шифр «Система»), в 2012 году.
«Разработка общих технических требований по эргономике и технической
эстетике систем и комплексов вооружения и военной техники»
(шифр «ДОТ 9/6/04»), в 2014 году.
«Разработка общих технических требований к средствам отображения
информации военного назначения» (шифр «ДОТ 24/03»), в 2015 году.
«Разработка общих требований к методам контроля эргономических
характеристик, обитаемости и технической эстетики систем и комплексов
(образцов) вооружения и военной техники» (шифр «ДОТ 9/6/10»), в 2016 году.
«Разработка общих эргономических требований к системам и комплексам
вооружения и военной техники военно-воздушных сил и войск противовоздушной
обороны» (шифр «Комфорт»), в 2017 году.
«Разработка проекта программ и методик предварительных испытаний
опытных образцов 82-мм и 120-мм минометов» (шифр «Лотос-ПМ»), в 2017 году.
«Разработка программного обеспечения и конструкторской документации
КСА управления воздушным движением на базе модуля обработки
радиолокационной информации» (шифр «Сапфир»), в 2018 году.
32.
Апробация результатов32
Международная военно-научная конференция «Актуальные аспекты инновационного развития
Вооруженных Сил, с учетом характера войн будущего», 30–31 марта 2011 г, Военная академия
Республики Беларусь.
Международная военно-научная конференция «Современная военно-техническая политика:
проблемы и перспективы», 21–22 марта 2013 г, Военная академия Республики Беларусь.
V ежегодный научно-практический семинар по связи «Применение современных информационных
технологий с учетом особенностей сетецентрических подходов к военным действиям», 29 января 2014 г,
Военная академия Республики Беларусь.
XXVII Республиканская научная конференция студентов и аспирантов, 24–26 марта 2014 г,
Гомельский государственный университет имени Ф. Скорины.
Международная научная конференция «Информационные технологии и системы»,
29 октября 2014 г, Белорусский государственный университет информатики и радиоэлектроники.
Международная военно-научная конференция «Обеспечение военной безопасности государства:
проблемы и перспективы», 23–24 марта 2017 г, Военная академия Республики Беларусь.
III международная заочная научно-практическая конференция «Авиация: история, современность,
перспективы развития», 8–9 ноября 2018 г, Белорусская государственная академия авиации.
VIII Международная научная конференция по военно-научным проблемам, проблемам обороны
и безопасности, использования технологий двойного применения, 16-17 мая 2019 г, Государственный
военно-промышленный комитет Республики Беларусь.
V международная заочная научно-практическая конференция «Авиация: история, современность,
перспективы развития» 22 октября 2020 г, Белорусская государственная академия авиации.
Опубликованность результатов
Опубликовано: 9 статей, 9 публикаций по материалам докладов на научных
конференциях и семинарах, 6 отчетов о НИР, 4 нормативно-технических документа.
33.
Патент. Акты реализации33
34.
СПАСИБО ЗА ВНИМАНИЕ !35.
36.
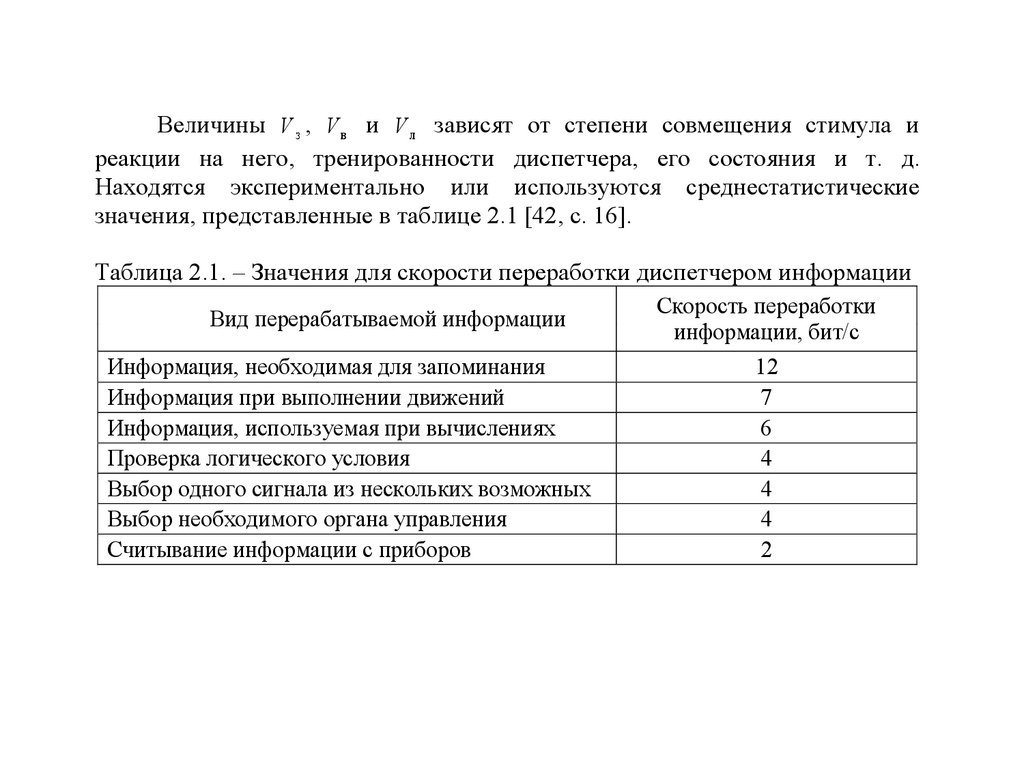
Величины V з , V в и V л зависят от степени совмещения стимула иреакции на него, тренированности диспетчера, его состояния и т. д.
Находятся экспериментально или используются среднестатистические
значения, представленные в таблице 2.1 [42, с. 16].
Таблица 2.1. – Значения для скорости переработки диспетчером информации
Вид перерабатываемой информации
Информация, необходимая для запоминания
Информация при выполнении движений
Информация, используемая при вычислениях
Проверка логического условия
Выбор одного сигнала из нескольких возможных
Выбор необходимого органа управления
Считывание информации с приборов
Скорость переработки
информации, бит/с
12
7
6
4
4
4
2
37.
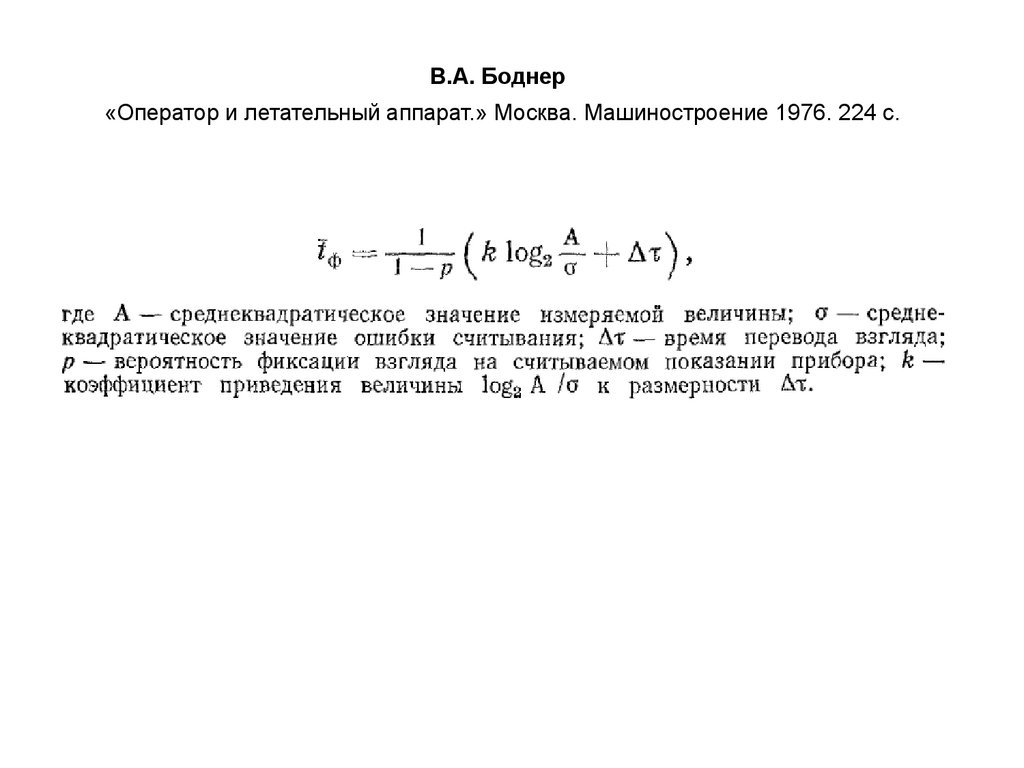
В.А. Боднер«Оператор и летательный аппарат.» Москва. Машиностроение 1976. 224 с.
38.
39.
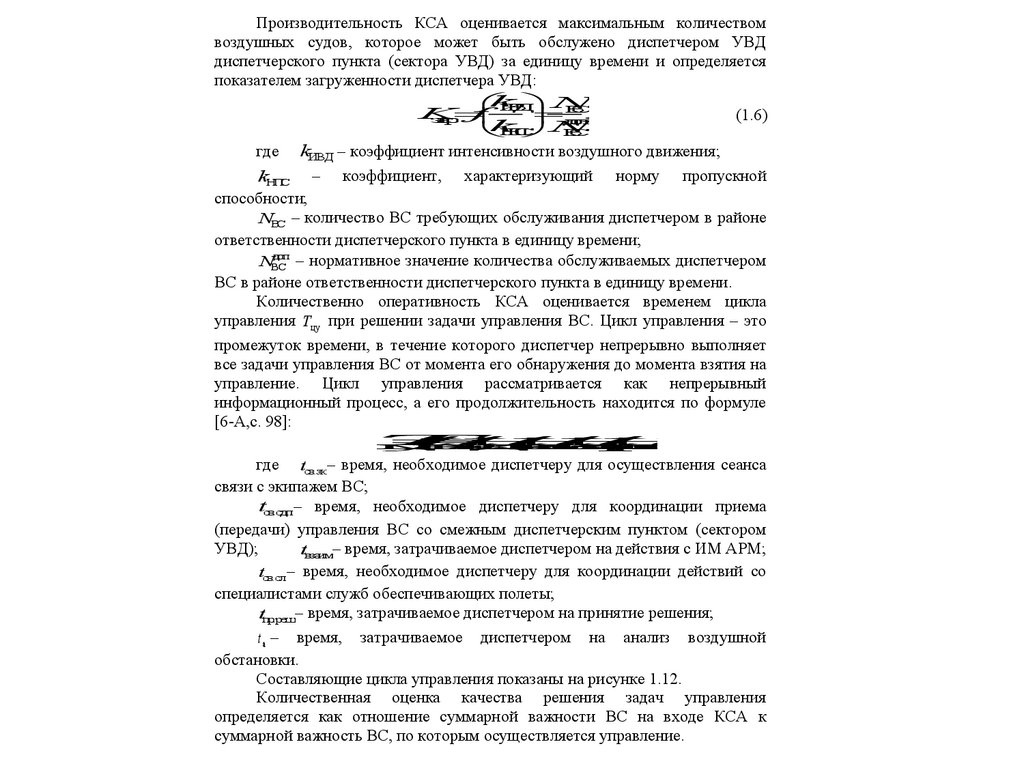
Производительность КСА оценивается максимальным количествомвоздушных судов, которое может быть обслужено диспетчером УВД
диспетчерского пункта (сектора УВД) за единицу времени и определяется
показателем загруженности диспетчера УВД:
k
N
В
Д
В
С
K
f И
д
,
(1.6)
з
а
г
р
о
п
k
Н
П
С
N
В
С
где kИВД – коэффициент интенсивности воздушного движения;
kНПС – коэффициент, характеризующий норму пропускной
способности;
NВС – количество ВС требующих обслуживания диспетчером в районе
ответственности диспетчерского пункта в единицу времени;
доп
NВ
С – нормативное значение количества обслуживаемых диспетчером
ВС в районе ответственности диспетчерского пункта в единицу времени.
Количественно оперативность КСА оценивается временем цикла
управления Tцу при решении задачи управления ВС. Цикл управления – это
промежуток времени, в течение которого диспетчер непрерывно выполняет
все задачи управления ВС от момента его обнаружения до момента взятия на
управление. Цикл управления рассматривается как непрерывный
информационный процесс, а его продолжительность находится по формуле
[6-А,с. 98]:
Т
t
t
t
t
tt
,
ц
у
с
в
.
э
к
с
в
.
с
д
п
в
з
а
и
м
с
в
.
с
л
п
р
.
р
е
ш
а
где tсв.эк– время, необходимое диспетчеру для осуществления сеанса
связи с экипажем ВС;
tсв.сдп– время, необходимое диспетчеру для координации приема
(передачи) управления ВС со смежным диспетчерским пунктом (сектором
УВД);
tвзаим– время, затрачиваемое диспетчером на действия с ИМ АРМ;
tсв.сл– время, необходимое диспетчеру для координации действий со
специалистами служб обеспечивающих полеты;
tпр.реш– время, затрачиваемое диспетчером на принятие решения;
t а – время, затрачиваемое диспетчером на анализ воздушной
обстановки.
Составляющие цикла управления показаны на рисунке 1.12.
Количественная оценка качества решения задач управления
определяется как отношение суммарной важности ВС на входе КСА к
суммарной важность ВС, по которым осуществляется управление.
40.
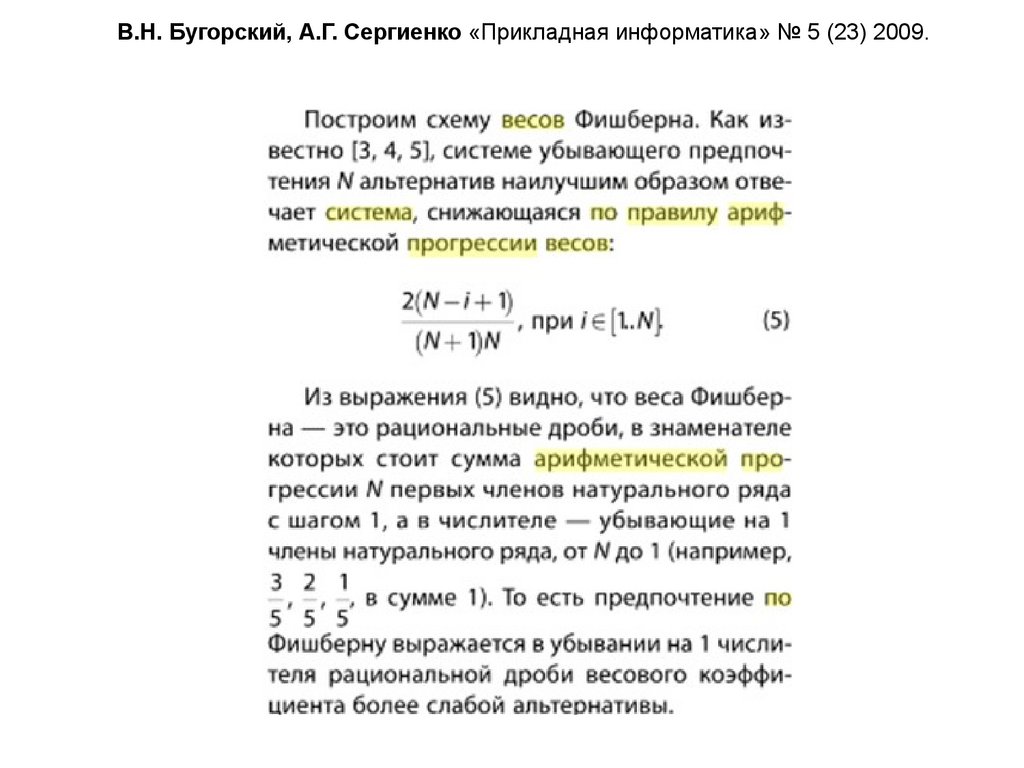
В.Н. Бугорский, А.Г. Сергиенко «Прикладная информатика» № 5 (23) 2009.41.
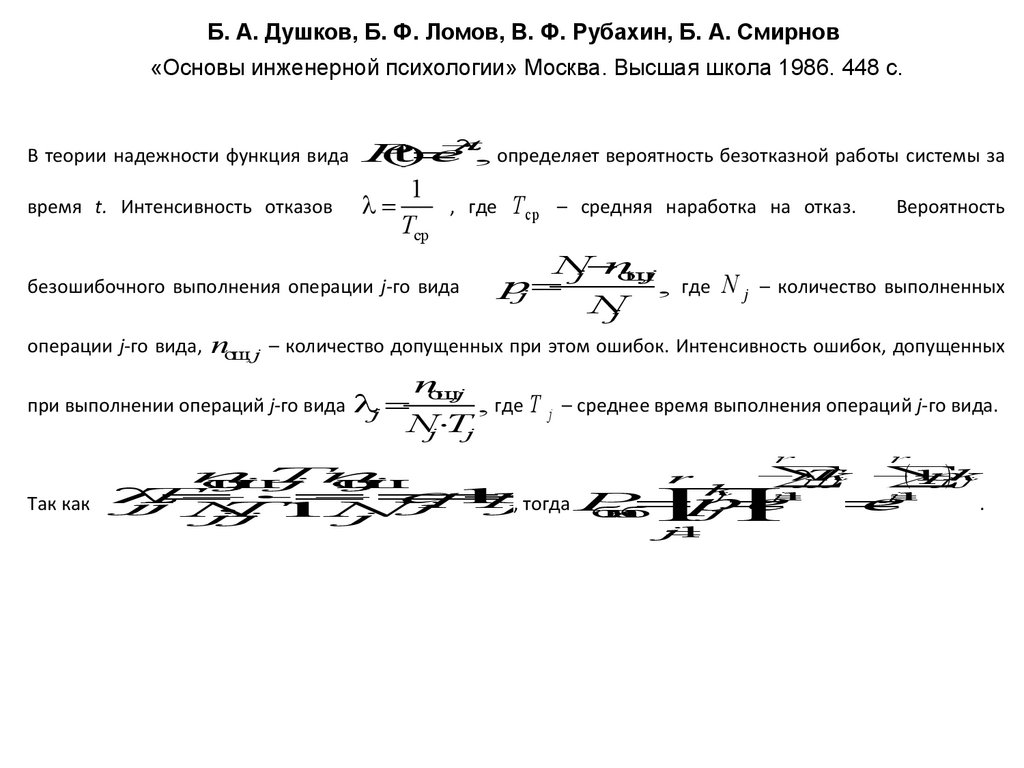
Б. А. Душков, Б. Ф. Ломов, В. Ф. Рубахин, Б. А. Смирнов«Основы инженерной психологии» Москва. Высшая школа 1986. 448 с.
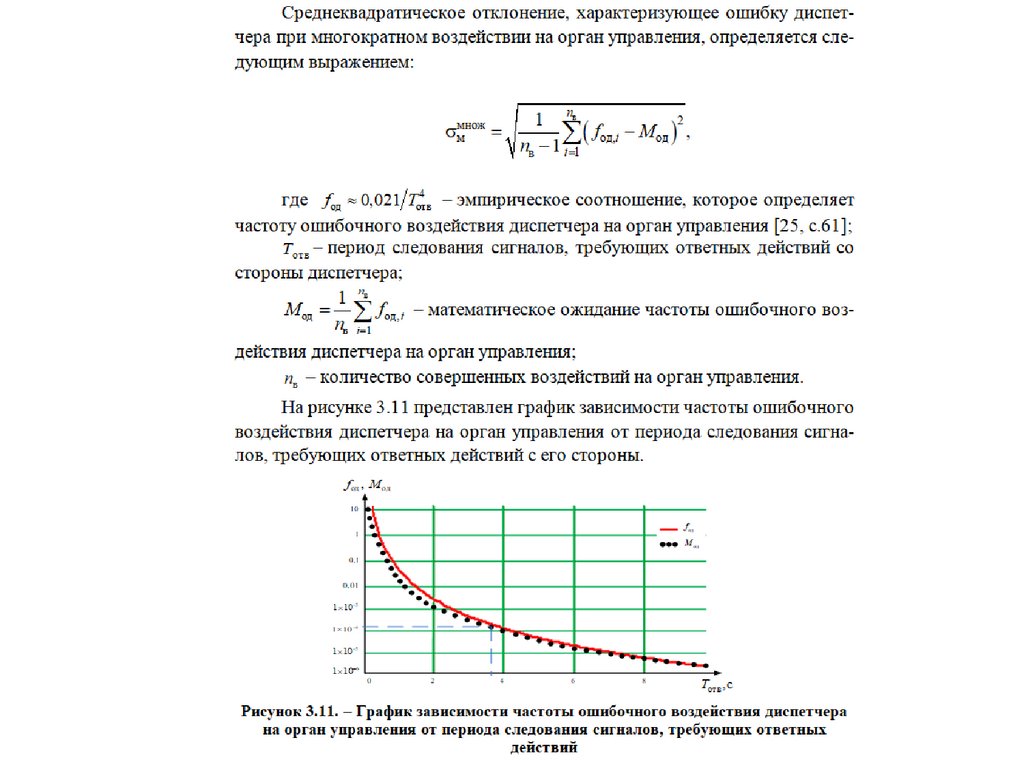
В теории надежности функция вида
время t. Интенсивность отказов
t
P
(
t
)
e
, определяет вероятность безотказной работы системы за
1
, где Tср – средняя наработка на отказ.
Вероятность
Tср
безошибочного выполнения операции j-го вида
N
n
j
о
ш
,j
p
, где N j – количество выполненных
j
N
j
операции j-го вида, nош, j – количество допущенных при этом ошибок. Интенсивность ошибок, допущенных
при выполнении операций j-го вида j
nош,j
Nj Тj
, где Т j – среднее время выполнения операций j-го вида.
r
r
T
k
p
n
1
k
r
jjj
j
j
о
ш
,
jТ
j n
о
ш
,
j
k
j
j
1
j
1
T
q
1
p
Так как
, тогда P
.
p
e
e
jj N
j
j
Т
1N
б
.
н
а
б
j
jj
j
j
1
42.
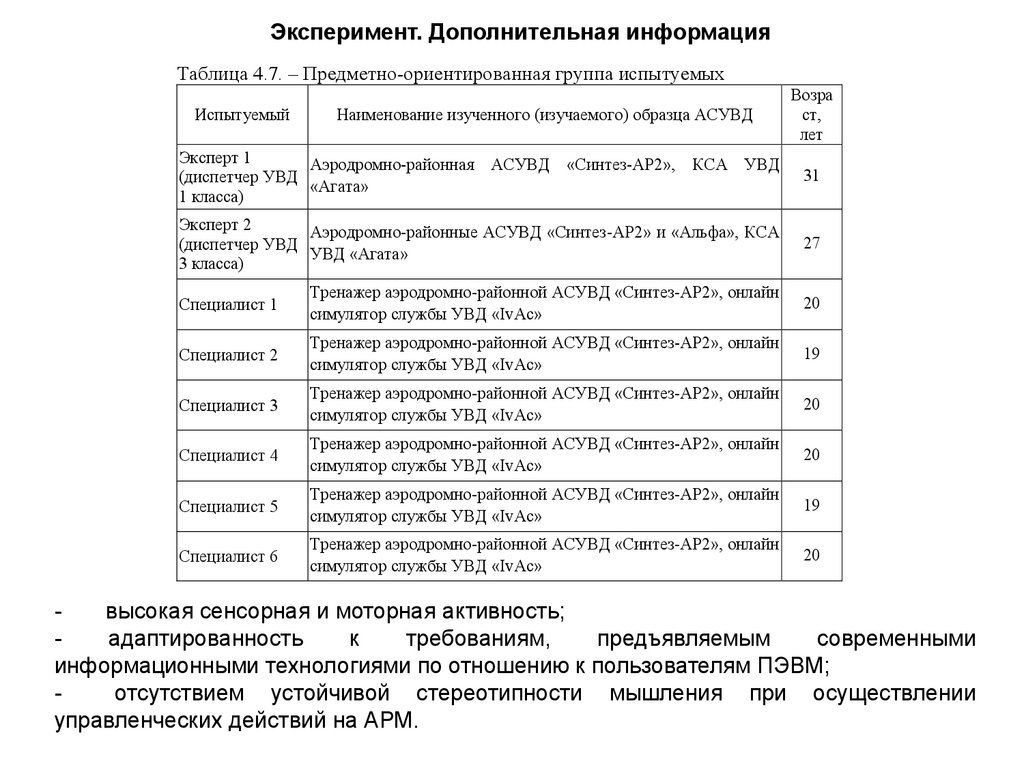
Эксперимент. Дополнительная информацияТаблица 4.7. – Предметно-ориентированная группа испытуемых
Испытуемый
Наименование изученного (изучаемого) образца АСУВД
Эксперт 1
Аэродромно-районная АСУВД
(диспетчер УВД
«Агата»
1 класса)
«Синтез-АР2», КСА УВД
Возра
ст,
лет
31
Эксперт 2
Аэродромно-районные АСУВД «Синтез-АР2» и «Альфа», КСА
(диспетчер УВД
УВД «Агата»
3 класса)
27
Специалист 1
Тренажер аэродромно-районной АСУВД «Синтез-АР2», онлайн
симулятор службы УВД «IvAc»
20
Специалист 2
Тренажер аэродромно-районной АСУВД «Синтез-АР2», онлайн
симулятор службы УВД «IvAc»
19
Специалист 3
Тренажер аэродромно-районной АСУВД «Синтез-АР2», онлайн
симулятор службы УВД «IvAc»
20
Специалист 4
Тренажер аэродромно-районной АСУВД «Синтез-АР2», онлайн
симулятор службы УВД «IvAc»
20
Специалист 5
Тренажер аэродромно-районной АСУВД «Синтез-АР2», онлайн
симулятор службы УВД «IvAc»
19
Специалист 6
Тренажер аэродромно-районной АСУВД «Синтез-АР2», онлайн
симулятор службы УВД «IvAc»
20
высокая сенсорная и моторная активность;
адаптированность
к
требованиям,
предъявляемым
современными
информационными технологиями по отношению к пользователям ПЭВМ;
отсутствием устойчивой стереотипности мышления при осуществлении
управленческих действий на АРМ.
43.
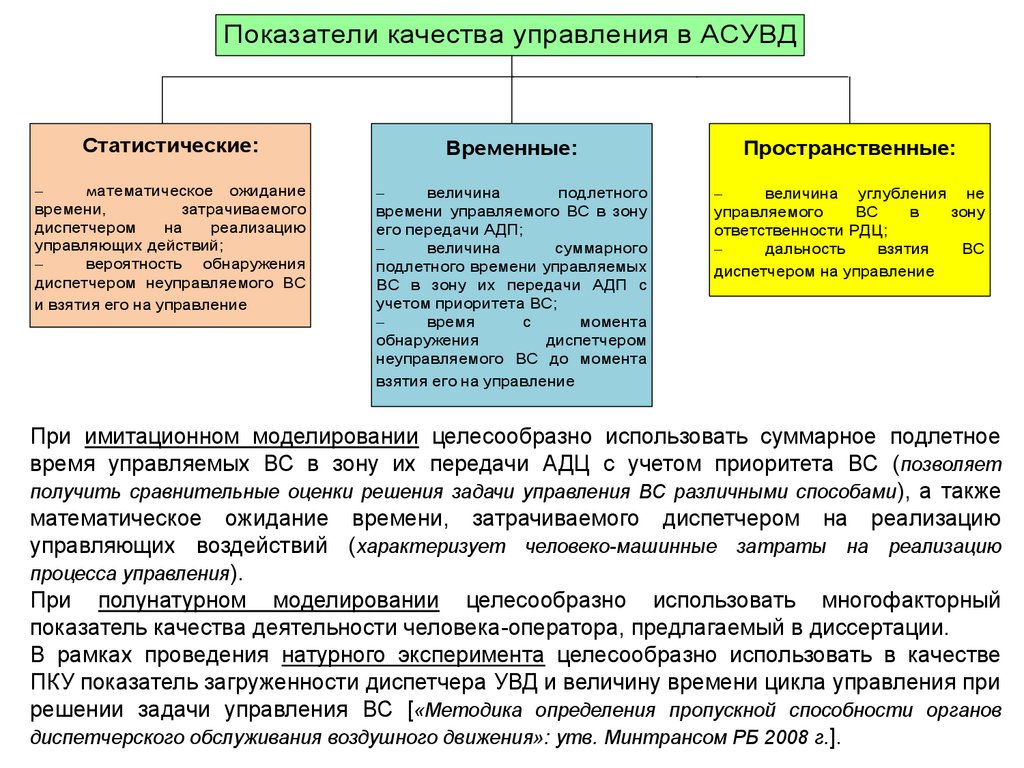
Показатели качества управления в АСУВДСтатистические:
Временные:
Пространственные:
математическое ожидание
времени,
затрачиваемого
диспетчером
на
реализацию
управляющих действий;
вероятность обнаружения
диспетчером неуправляемого ВС
и взятия его на управление
величина
подлетного
времени управляемого ВС в зону
его передачи АДП;
величина
суммарного
подлетного времени управляемых
ВС в зону их передачи АДП с
учетом приоритета ВС;
время
с
момента
обнаружения
диспетчером
неуправляемого ВС до момента
взятия его на управление
величина углубления не
управляемого
ВС
в
зону
ответственности РДЦ;
дальность
взятия
ВС
диспетчером на управление
При имитационном моделировании целесообразно использовать суммарное подлетное
время управляемых ВС в зону их передачи АДЦ с учетом приоритета ВС ( позволяет
получить сравнительные оценки решения задачи управления ВС различными способами ), а также
математическое ожидание времени, затрачиваемого диспетчером на реализацию
управляющих воздействий (характеризует человеко-машинные затраты на реализацию
процесса управления).
При полунатурном моделировании целесообразно использовать многофакторный
показатель качества деятельности человека-оператора, предлагаемый в диссертации.
В рамках проведения натурного эксперимента целесообразно использовать в качестве
ПКУ показатель загруженности диспетчера УВД и величину времени цикла управления при
решении задачи управления ВС [«Методика определения пропускной способности органов
диспетчерского обслуживания воздушного движения»: утв. Минтрансом РБ 2008 г.].
44.
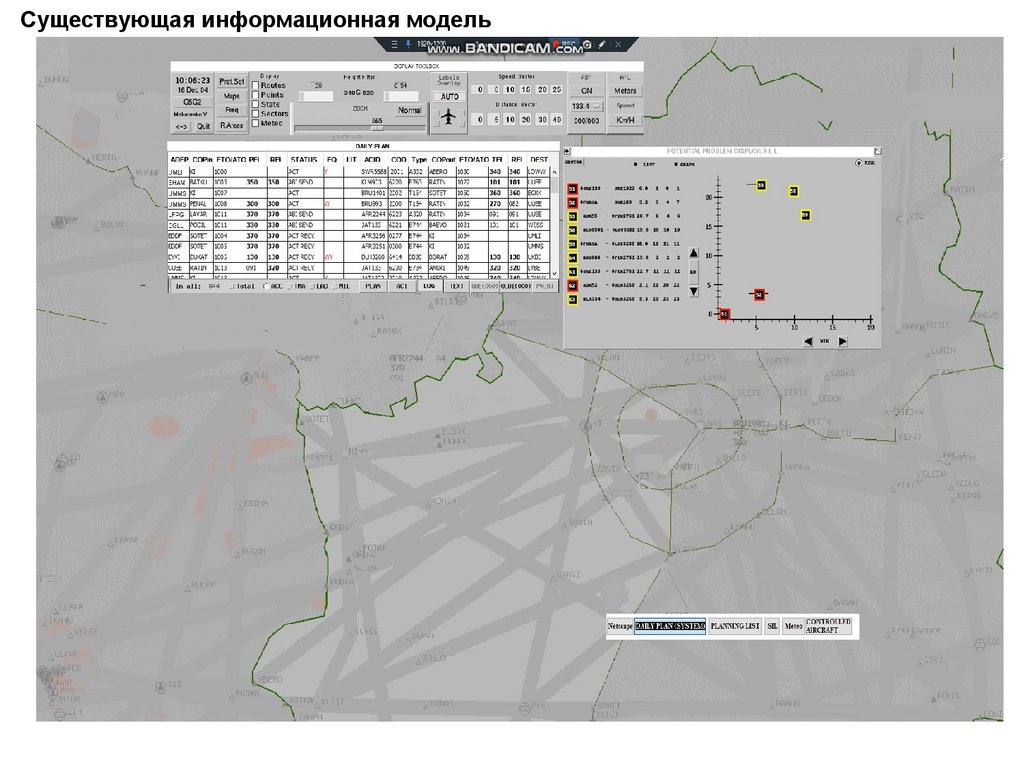
Существующая информационная модель45.
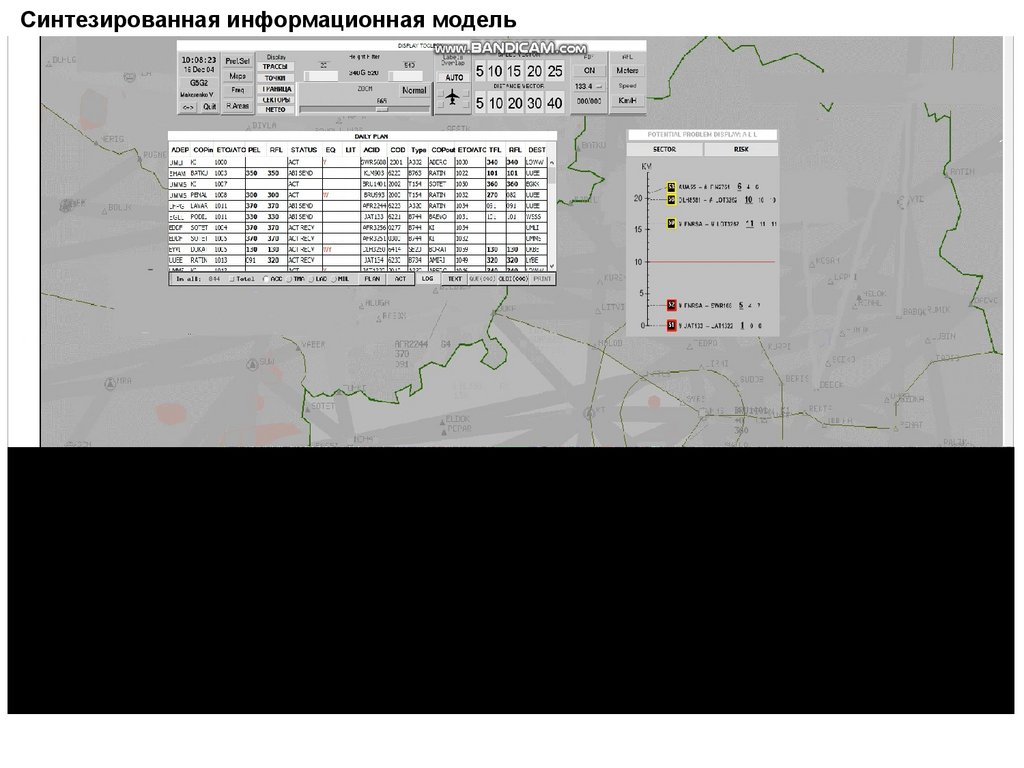
Синтезированная информационная модель46.
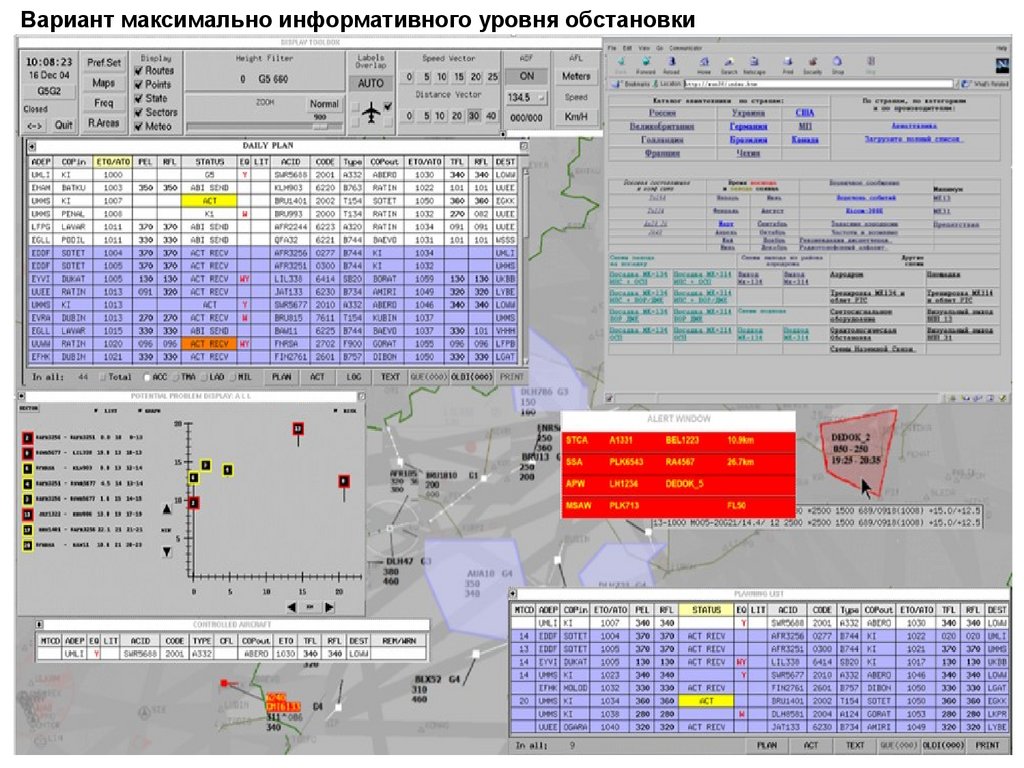
Вариант максимально информативного уровня обстановки47.
Таблица 1.2. – Экспериментальные значения математического ожидания,среднеквадратического отклонения времени выполнения и вероятности
безошибочного выполнения типовых действий человеком-оператором АСУ
специального назначения
Наименование типового действия
оператора
Выбор
очередного
ВС
для
назначения
подчиненному
средству
Уяснение рекомендации машины
по назначению ВС подчиненному
средству
Оценка основной характеристики
ВС по ее формуляру
Вызов расширенного формуляра
ВС
Уяснение содержания формуляра
ВС
Оценка состояния подчиненного
средства
Оценка
состояния
источника
информации по табло
Запрос упрежденной точки до ВС
Оценка подлетного времени ВС
Назначение ВС подчиненному
средству
Характеристика действия, с
Математическое
СКО
ожидание
времени
времени
выполнения
выполнения
действия
действия
Вероятность
безошибочного
выполнения
действия
3,1
1,5
0,97
1,7
0,7
1
0,5
0,5
1
4,1
1,5
0,98
1,1
0,9
0,99
0,5
0,5
1
3,3
1,3
0,99
4
1,4
1
0,8
0,98
0,98
5,2
2
0,96