





 electronics
electronicsSimilar presentations:

")








Приводы (двигатели). Тема 6
1. Тема 6
Приводы(двигатели)
2.
Привод – это механизм для приведения в действиеоборудования по управлению технологическими
процессами с использованием управляющих
сигналов.
электрических
пневматических
гидравлических
3.
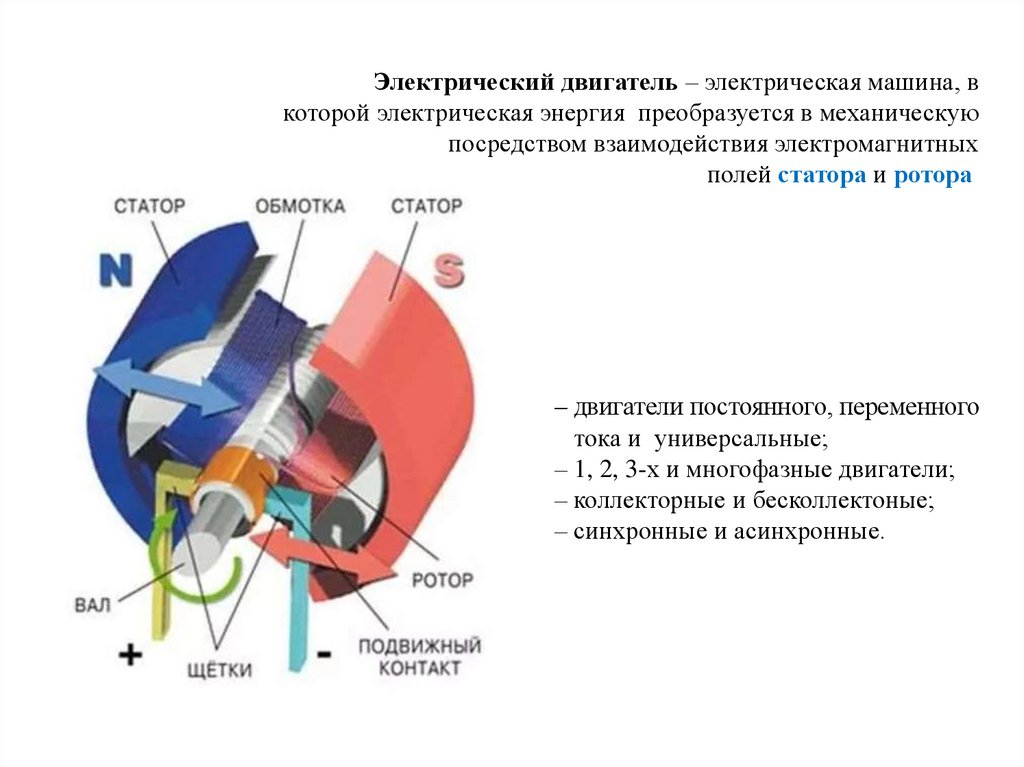
Электрический двигатель – электрическая машина, вкоторой электрическая энергия преобразуется в механическую
посредством взаимодействия электромагнитных
полей статора и ротора
– двигатели постоянного, переменного
тока и универсальные;
– 1, 2, 3-х и многофазные двигатели;
– коллекторные и бесколлектоные;
– синхронные и асинхронные.
4.
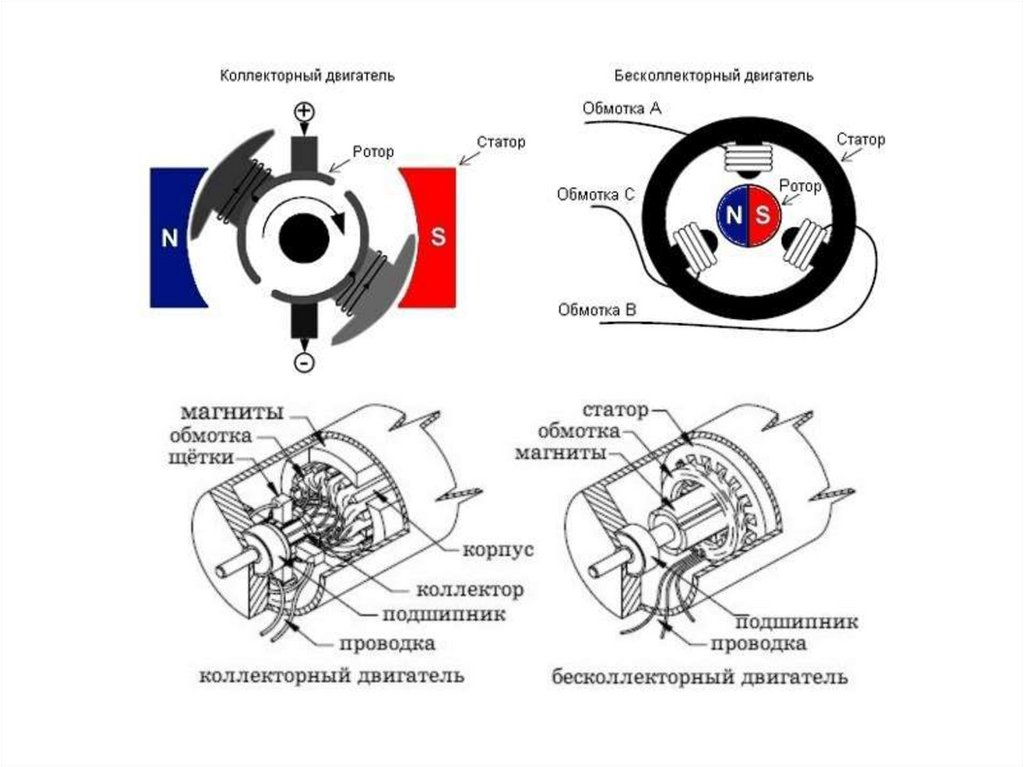
Коллекторный двигательКоллекторный электродвигатель – электрическая машина, в которой
датчиком положения ротора и переключателем тока в обмотках является
одно и то же устройство – щёточно-коллекторный узел.
5.
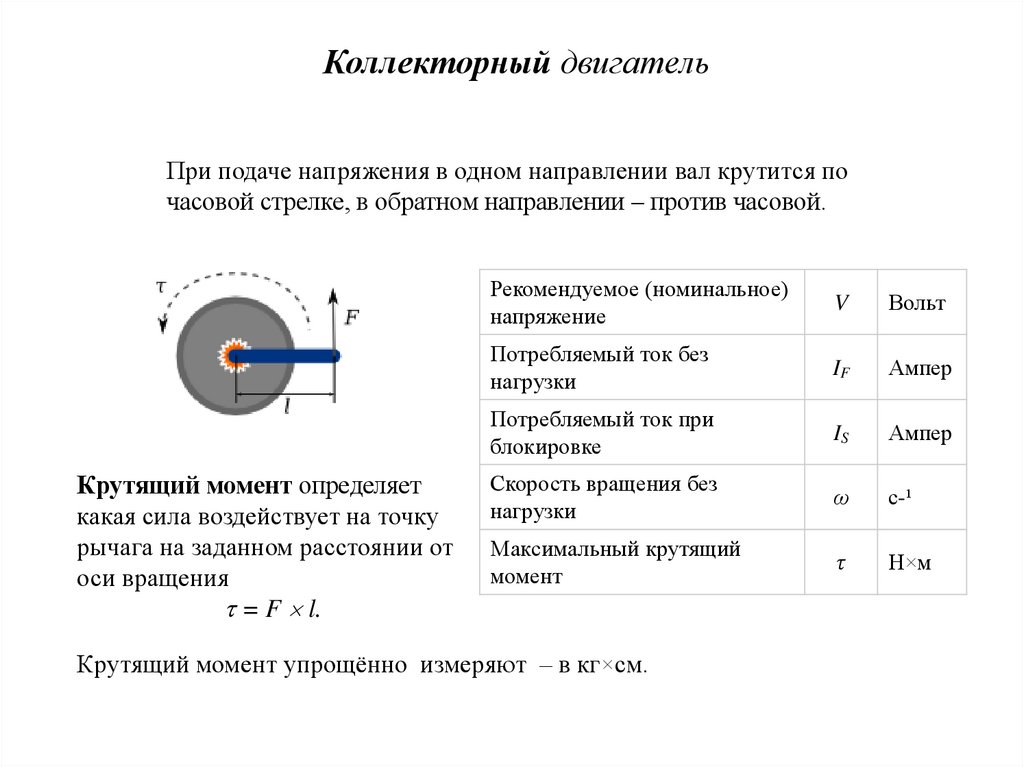
Коллекторный двигательПри подаче напряжения в одном направлении вал крутится по
часовой стрелке, в обратном направлении – против часовой.
Крутящий момент определяет
какая сила воздействует на точку
рычага на заданном расстоянии от
оси вращения
= F l.
Рекомендуемое (номинальное)
напряжение
V
Вольт
Потребляемый ток без
нагрузки
IF
Ампер
Потребляемый ток при
блокировке
IS
Ампер
Скорость вращения без
нагрузки
ω
с-¹
Максимальный крутящий
момент
τ
Н×м
Крутящий момент упрощённо измеряют – в кг×см.
6.
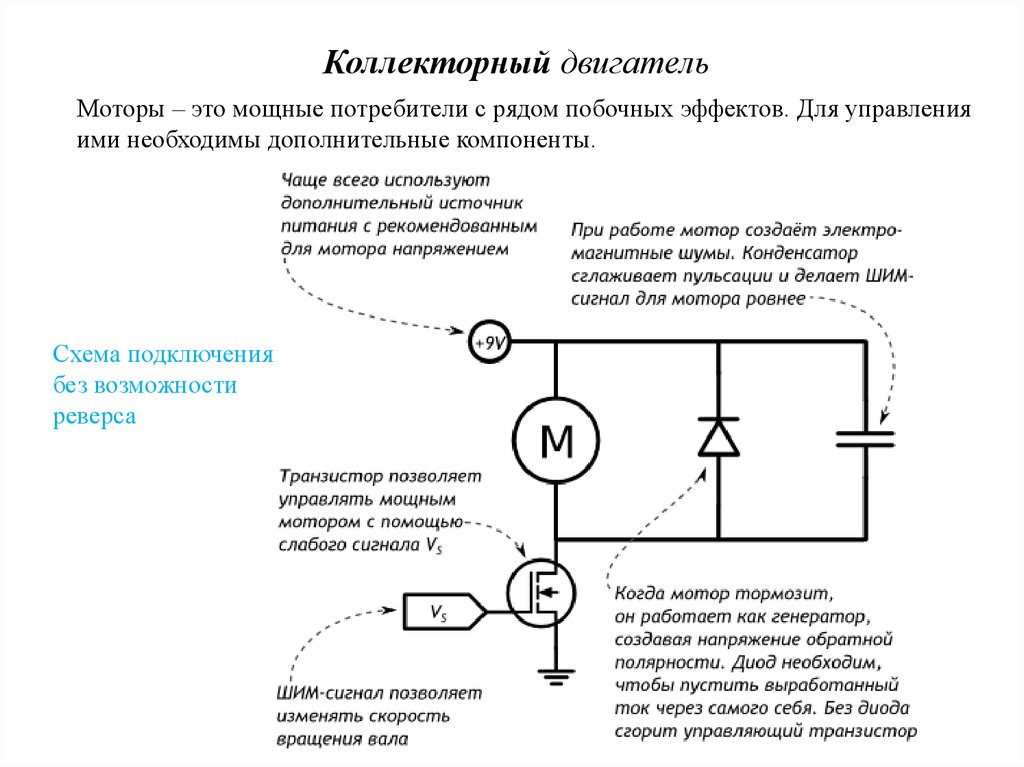
Коллекторный двигательМоторы – это мощные потребители с рядом побочных эффектов. Для управления
ими необходимы дополнительные компоненты.
Схема подключения
без возможности
реверса
7.
Коллекторный двигательДостоинства
- Низкая стоимость
- Надежность
- высокий крутящий момент
Недостатки
- Низкая износостойкость
- Требует регулярного технического обслуживания
для очистки или замены щеток
- Низкая теплоотдача
8.
Бесщеточный двигатель постоянного тока(бесколлекторный)
Принцип работы данного привода основан
на взаимодействии магнитных полей между
электромагнитом и постоянным магнитом.
Бесщеточный двигатель использует
постоянный магнит в качестве ротора. Он
использует трехфазные приводные катушки
и специализированный датчик, который
отслеживает положение ротора. И когда
датчик отслеживает положение ротора, он
посылает опорные сигналы контроллеру.
Контроллер, в свою очередь, активирует
катушки упорядоченным образом.
9.
Бесщеточный двигатель постоянного тока(бесколлекторный)
10.
Бесщеточный двигатель постоянного тока(бесколлекторный)
Достоинства
- Быстродействие
- Более высокая частота вращения
- Высокие динамические характеристики
- Длительный срок службы
- Бесшумная работа
Недостатки
- Сложный и дорогостоящий регулятор
скорости
- Не работает без электроники
11.
12.
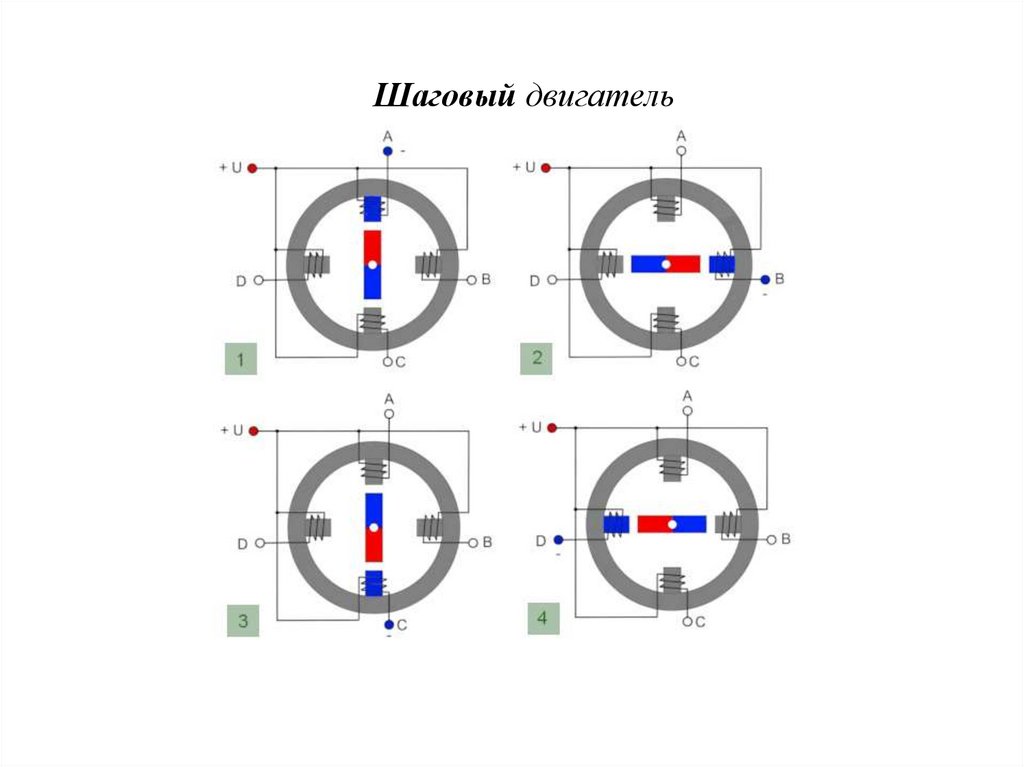
Шаговый двигательШаговый двигатель – это
электромеханическое устройство,
преобразующее электрические сигналы в
дискретные угловые перемещения вала.
Он способен поворачиваться на заданное
количество шагов. Один полный оборот
разбит на n шагов. Таким образом, можно
повернуть вал мотор на произвольный угол,
кратный 360 / n°.
13.
Шаговый двигатель14.
Шаговый двигательДостоинства
- Высокая точность работы
- Низкая стоимость
Недостатки
- Малый вращающий момент
- Ограниченная скорость
- Высокий уровень вибрации
- Проблема «проскальзывания» ротора при
повышенной нагрузке на вал
15.
СервоприводСервомотор или сервопривод – это электромеханический
привод, предназначенный для поворота на определенный угол,
в котором двигатель будет находиться до поступления новых
команд
Сервопривод – это электродвигатель с блоком
управления, который за счёт обратной связи может
точно поддерживать заданное положение вала или
постоянную скорость вращения.
16.
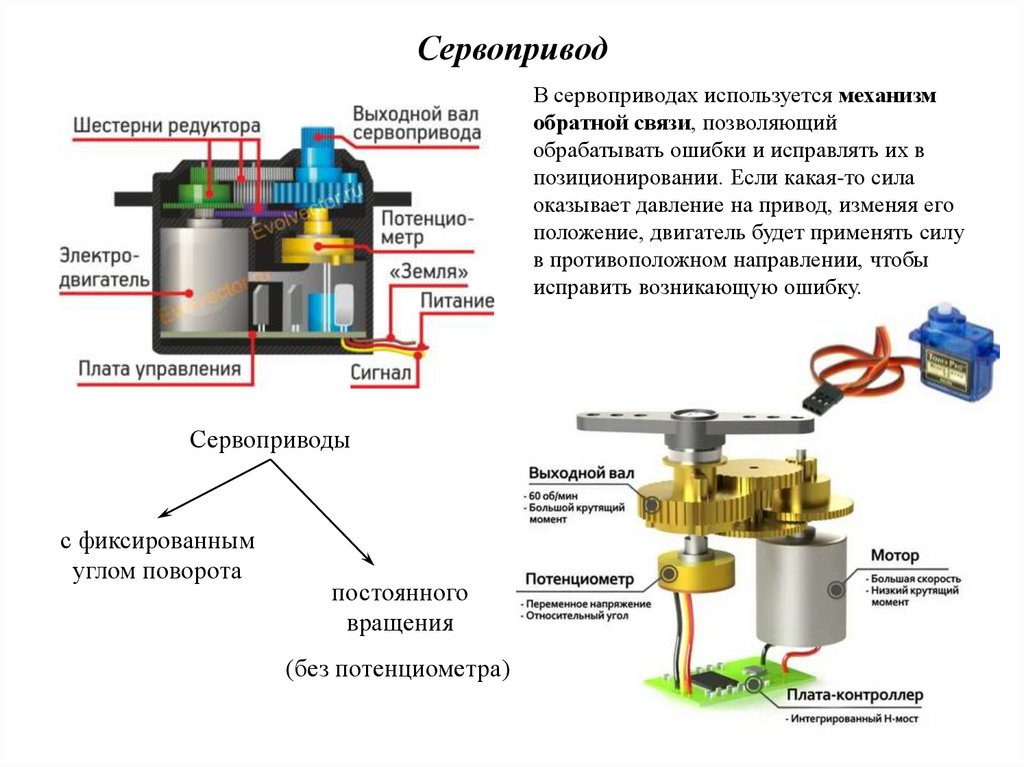
СервоприводВ сервоприводах используется механизм
обратной связи, позволяющий
обрабатывать ошибки и исправлять их в
позиционировании. Если какая-то сила
оказывает давление на привод, изменяя его
положение, двигатель будет применять силу
в противоположном направлении, чтобы
исправить возникающую ошибку.
Сервоприводы
с фиксированным
углом поворота
постоянного
вращения
(без потенциометра)
17.
СервоприводХарактеристики
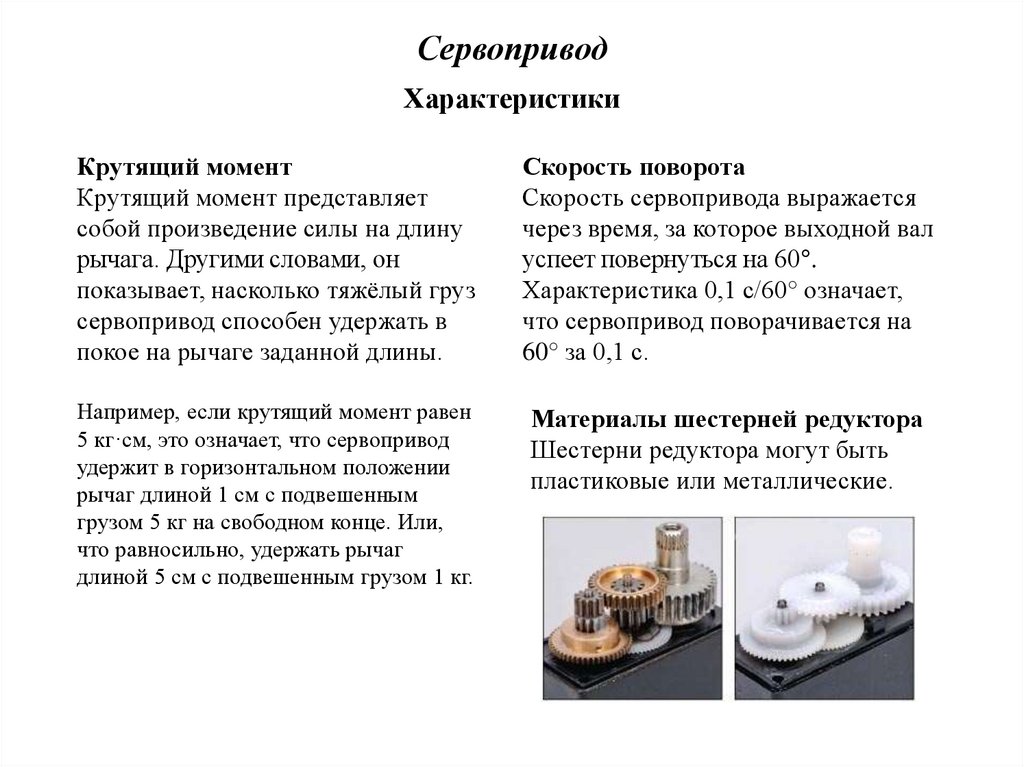
Крутящий момент
Крутящий момент представляет
собой произведение силы на длину
рычага. Другими словами, он
показывает, насколько тяжёлый груз
сервопривод способен удержать в
покое на рычаге заданной длины.
Скорость поворота
Скорость сервопривода выражается
через время, за которое выходной вал
успеет повернуться на 60°.
Характеристика 0,1 с/60° означает,
что сервопривод поворачивается на
60° за 0,1 с.
Например, если крутящий момент равен
5 кг·см, это означает, что сервопривод
удержит в горизонтальном положении
рычаг длиной 1 см с подвешенным
грузом 5 кг на свободном конце. Или,
что равносильно, удержать рычаг
длиной 5 см с подвешенным грузом 1 кг.
Материалы шестерней редуктора
Шестерни редуктора могут быть
пластиковые или металлические.
18.
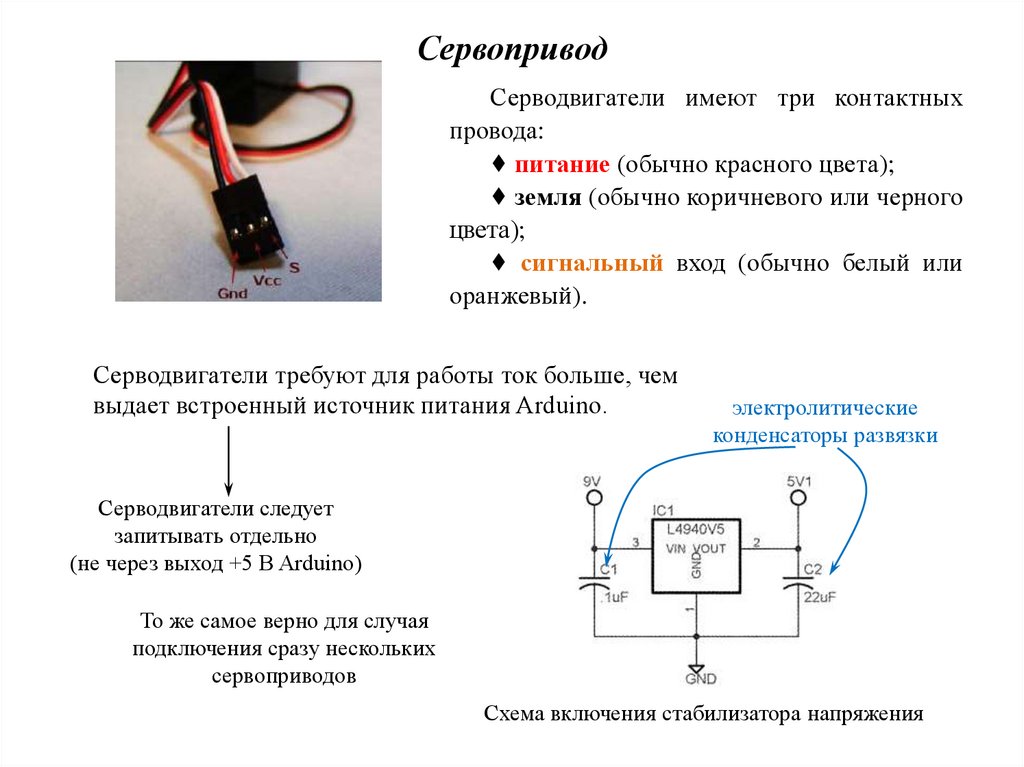
СервоприводСерводвигатели имеют три контактных
провода:
♦ питание (обычно красного цвета);
♦ земля (обычно коричневого или черного
цвета);
♦ сигнальный вход (обычно белый или
оранжевый).
Серводвигатели требуют для работы ток больше, чем
выдает встроенный источник питания Arduino.
электролитические
конденсаторы развязки
Серводвигатели следует
запитывать отдельно
(не через выход +5 В Arduino)
То же самое верно для случая
подключения сразу нескольких
сервоприводов
Схема включения стабилизатора напряжения
19.
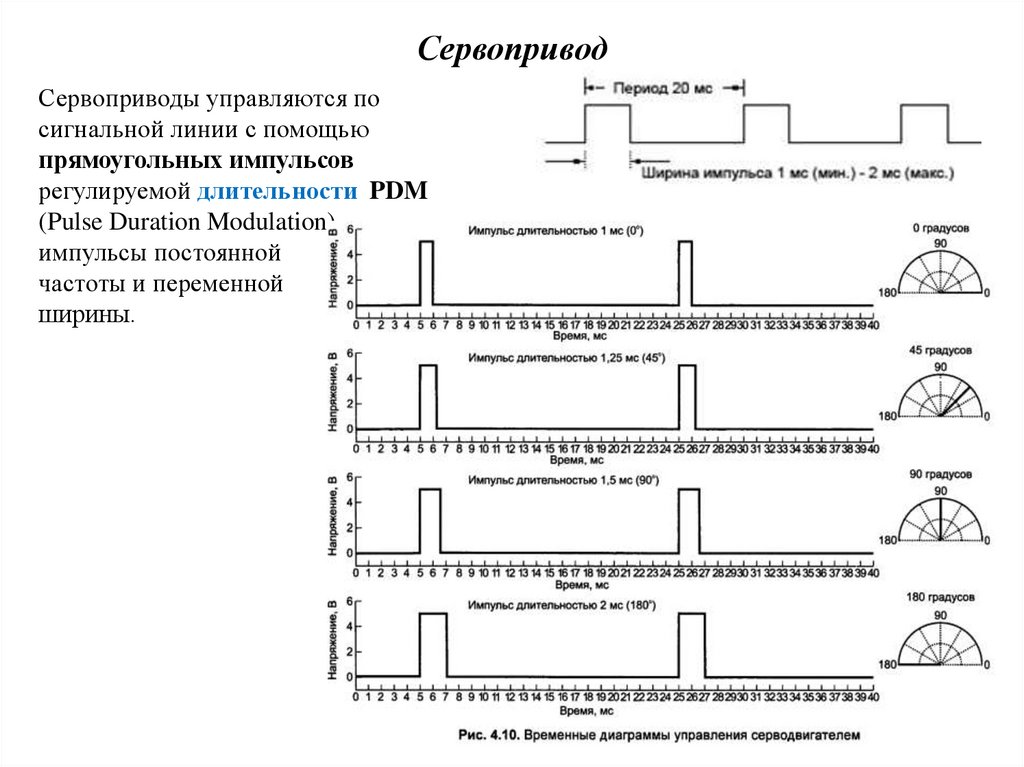
СервоприводСервоприводы управляются по
сигнальной линии с помощью
прямоугольных импульсов
регулируемой длительности PDM
(Pulse Duration Modulation) —
импульсы постоянной
частоты и переменной
ширины.
20.
СервоприводДостоинства
- Более высокая скорость вращения
- Высокая мощность
- Позиция механизма всегда на виду и
доступна для корректирования
Недостатки
- - Сложная система подключения и
управления
- Требует квалифицированного
обслуживания
- Высокая стоимость
21.
Функции библиотеки Servoдля управления сервоприводом
attach(pin, min, max) – указывает вывод к которому подключен
сервопривод.
ширина импульса в микросекундах,
соответствующая минимальному
(угол 0 градусов) положению сервопривода
ширина импульса в микросекундах,
соответствующая максимальному
(угол 180 градусов) положению
сервопривода
по умолчанию выставляются равными 544 мкс и 2400 мкс соответственно
write (angle) – передает значения для управления приводом.
угол поворота (стандартный сервопривод)
скорость вращения (привод постоянного
вращения)
read () – считывает значение текущего положения сервопривода.
detach(pin, min, max) – отсоединяет экземпляр класса от пина. При
отсоединения всех сервоприводов, заблокированные ШИМ выводы снова
станут доступны.
22.
Функции библиотеки Servoдля управления сервоприводом
На платах Arduino, отличных от Mega, использование библиотеки
отключает возможность
использования analogWrite() (ШИМ) на пинах 9 и 10
(вне зависимости, подключены к этим пинам сервоприводы или нет).
На платах Arduino Mega до 12 сервоприводов могут
использоваться без влияния на функциональность ШИМ,
но использование от 12
до 23 сервоприводов отключит ШИМ на пинах 11 и 12.
23.
Пример управления сервоприводом#include <Servo.h>
Servo myservo;
24.
Пример управления сервоприводом#include <Servo.h>
Servo myservo;
void setup()
{
myservo.attach(9);
}
25.
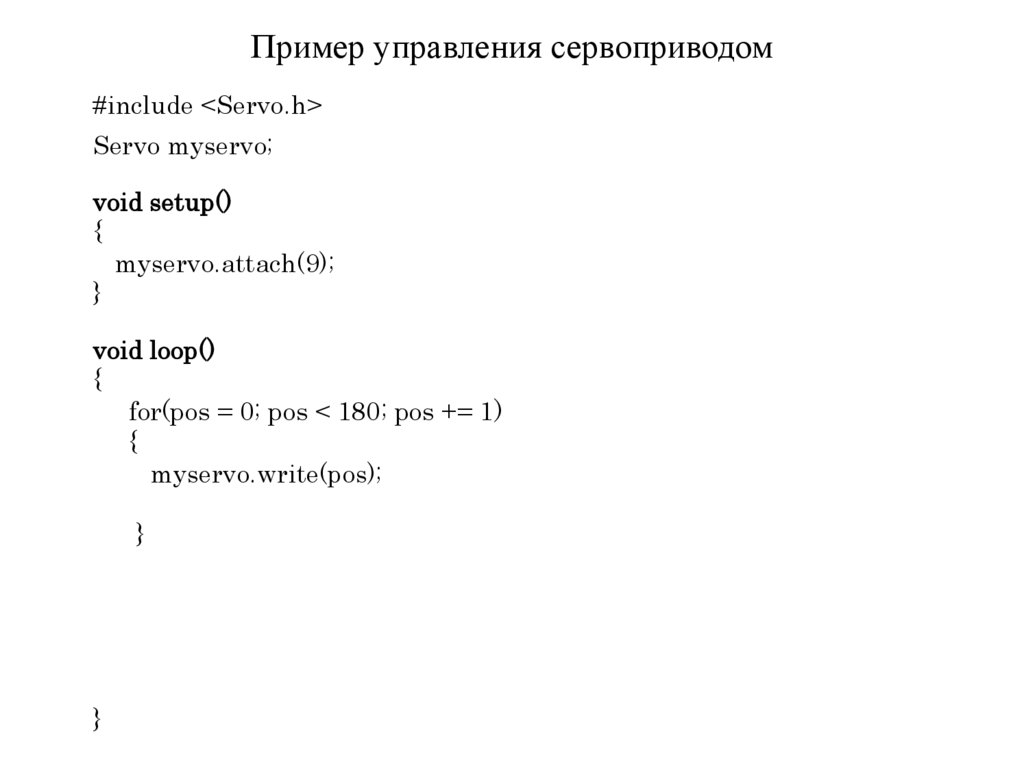
Пример управления сервоприводом#include <Servo.h>
Servo myservo;
void setup()
{
myservo.attach(9);
}
void loop()
{
for(pos = 0; pos < 180; pos += 1)
{
myservo.write(pos);
}
}
26.
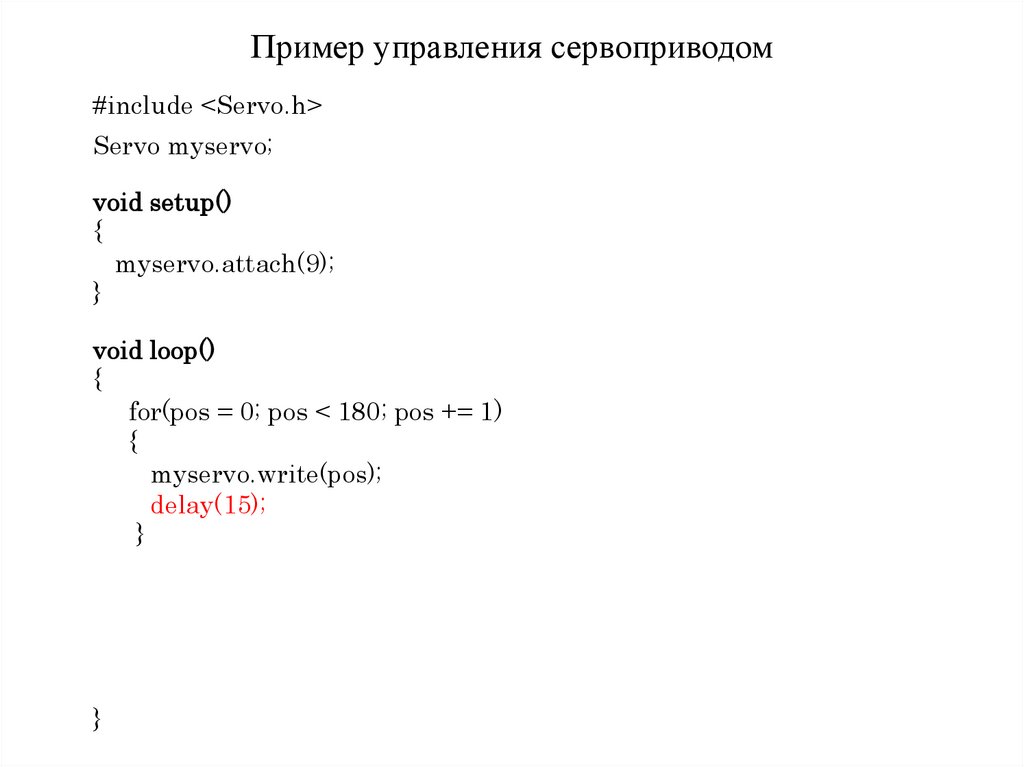
Пример управления сервоприводом#include <Servo.h>
Servo myservo;
void setup()
{
myservo.attach(9);
}
void loop()
{
for(pos = 0; pos < 180; pos += 1)
{
myservo.write(pos);
delay(15);
}
}
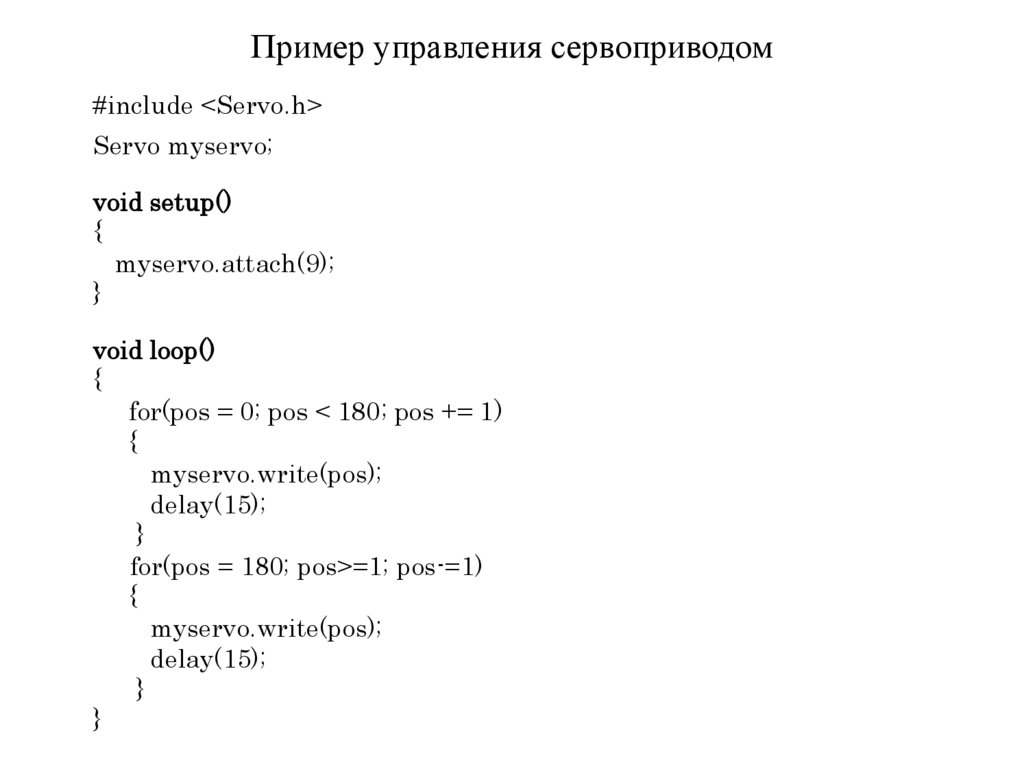
27.
Пример управления сервоприводом#include <Servo.h>
Servo myservo;
void setup()
{
myservo.attach(9);
}
void loop()
{
for(pos = 0; pos < 180; pos += 1)
{
myservo.write(pos);
delay(15);
}
for(pos = 180; pos>=1; pos-=1)
{
myservo.write(pos);
delay(15);
}
}