












































 electronics
electronicsSimilar presentations:










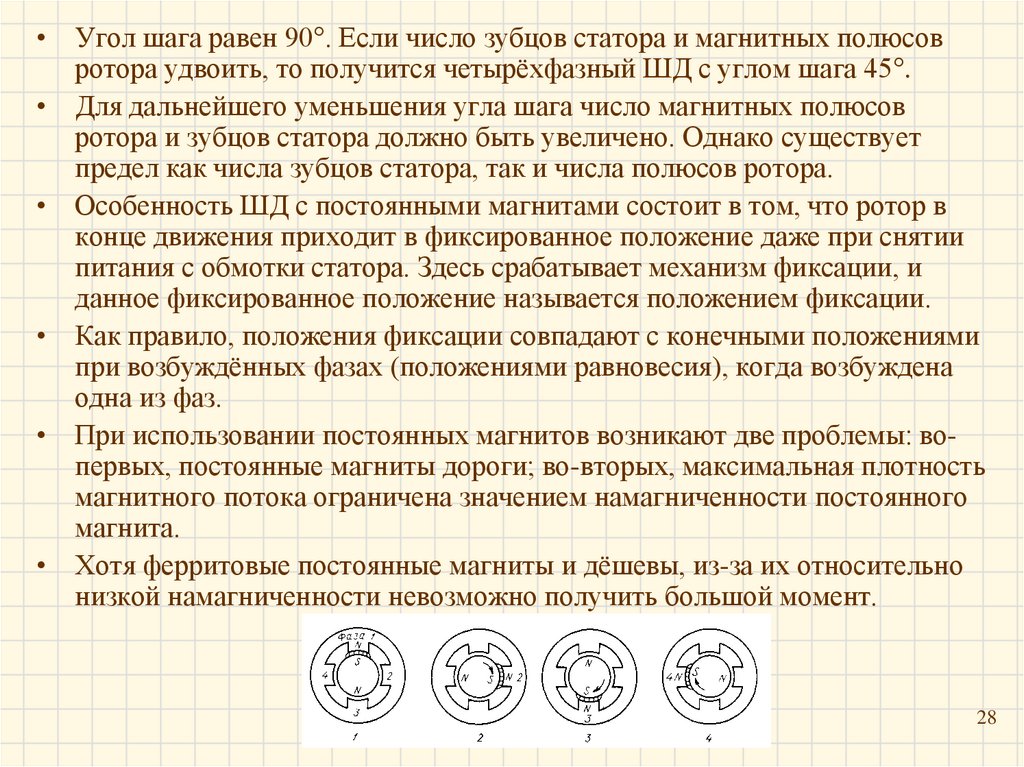
Электромеханика. Следящий привод с шаговым двигателем
1. ЭЛЕКТРОМЕХАНИКА
ИТТСУ кафедра «Управление и защита информации»ЭЛЕКТРОМЕХАНИКА
Следящий привод с шаговым
двигателем
1
2. Шаговые двигатели
по книге Кенио Т. Шаговые двигатели и их микропроцессорныесистемы управления: Пер. с англ. - М.: Энергоатомиздат, 1987. -200
с.: ил.
ШАГОВЫЕ ДВИГАТЕЛИ
2
3. Принцип действия реактивного ШД
34.
• Сердечник статора имеет шесть выступающихзубцов, в то время как ротор всего четыре
• Сердечники как ротора, так и статора
выполнены из магнитомягкой стали.
• Каждый из трёх наборов обмоток состоит из двух
катушек, соединённых последовательно.
• Набор обмоток называется фазой, и,
соответственно, машина — трёхфазным
двигателем.
4
5.
• Ток на обмотки подаётся от источника постоянного тока черезпереключатели , и . В положении (1) обмотка фазы «I»
подключена к источнику через переключатель или согласно
технической терминологии возбуждена фаза «I».
• Магнитный поток, возникающий в результате возбуждения,
показан на рисунке стрелками. В положении (1) два
выступающих зубца статора фазы «I», будучи возбуждёнными,
останавливаются на одной прямой с двумя из четырёх зубцов
ротора. В терминах динамики это положение является
положением равновесия.
• Когда замыканием переключателя II в дополнение к фазе I
возбуждается фаза II, в зубцах статора, соответствующих этой
фазе, возникает магнитный поток, как показано на рисунке для
положения (2), и вследствие ’’натяжения” в наклонных силовых
линиях магнитного поля возникает вращающий момент. Ротор, в
конце концов, принимает положение (3).
5
6.
• Таким образом, за время выполнения однойоперации переключения ротор поворачивается на
фиксированный угол, который называется углом
шага или шагом, в данном случае на 15°.
• Если теперь разомкнуть переключатель и
отсоединить от источника питания фазу «I»,
ротор повернётся на следующие 15° и займет
положение (4).
• Таким образом, угловым положением ротора в
единицах угла шага можно управлять с помощью
процесса переключения.
6
7.
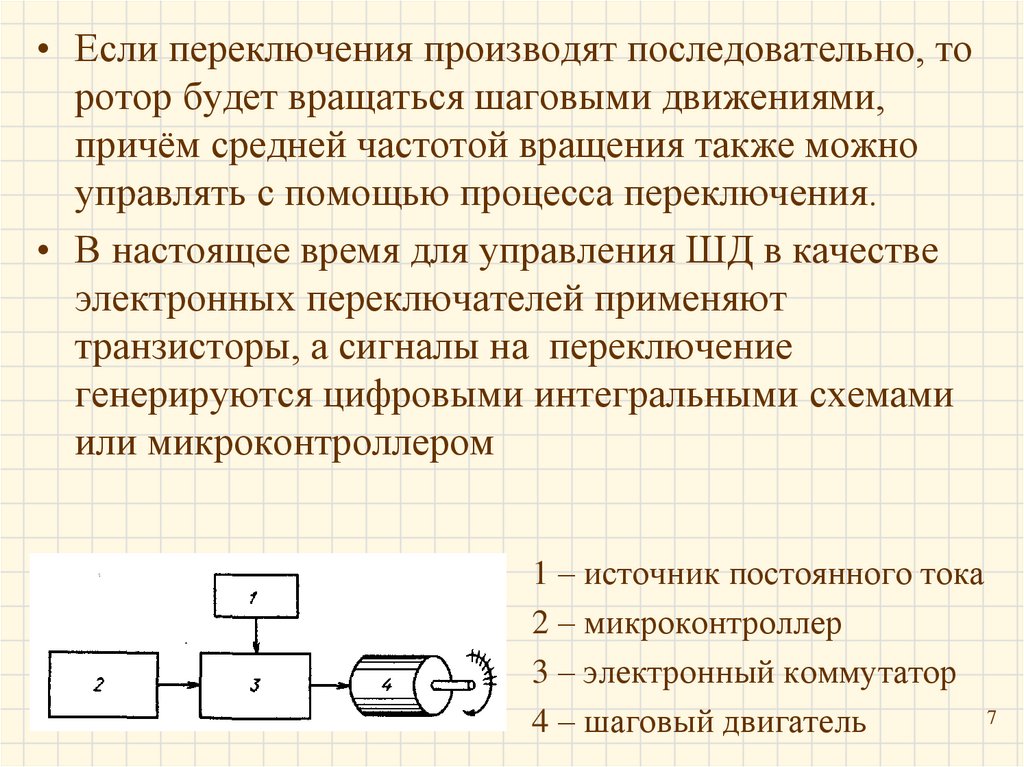
• Если переключения производят последовательно, торотор будет вращаться шаговыми движениями,
причём средней частотой вращения также можно
управлять с помощью процесса переключения.
• В настоящее время для управления ШД в качестве
электронных переключателей применяют
транзисторы, а сигналы на переключение
генерируются цифровыми интегральными схемами
или микроконтроллером
1 – источник постоянного тока
2 – микроконтроллер
3 – электронный коммутатор
7
4 – шаговый двигатель
8.
• Шаговый двигатель — это электрический двигатель,преобразующий цифровой электрический входной
сигнал в механическое движение.
• По сравнению с другими приборами, которые могут
выполнять эти же или подобные функции, система
управления, используемая в ШДЧ обладает
следующими существенными преимуществами:
– отсутствие обратной связи, обычно необходимой для
управления положением или частотой вращения;
– не накапливается ошибка положения;
– ШД совместим с цифровыми устройствами.
• По этим причинам различные типы и классы ШД
используют в периферийных устройствах ЭВМ и
подобных системах.
8
9. СИСТЕМЫ УПРАВЛЕНИЯ БЕЗ ОБРАТНОЙ СВЯЗИ
ОСНОВНЫЕ ПРИНЦИПЫ ШАГОВЫХ ДВИГАТЕЛЕЙСИСТЕМЫ УПРАВЛЕНИЯ
БЕЗ ОБРАТНОЙ СВЯЗИ
9
10.
• Как правило, работой ШД управляет электронная схема,а питание его осуществляется от источника постоянного
тока. Шаговые двигатели применяют для управления
частотой вращения без применения контура обратной
связи. Этот принцип используется в приводе с
разомкнутой цепью.
• Управление без обратной связи хотя и является
экономически выгодным, но имеет и ряд ограничений.
• Например, поворот ротора становится колебательным и
нестабильным по значению конечных скоростей,
вследствие чего характеристики движения, частота
вращения и ускорение ШД с управлением без обратной
связи не могут быть такими же точными, как у
двигателей постоянного тока с обратной связью.
• Следовательно, уменьшение колебаний — это основная
проблема, которую необходимо разрешить для
10
расширения границ применения ШД.
11.
• Наиболее важной особенностью ШД является то, что накаждый импульс управления ротор поворачивается на
фиксированный угол, значение которого в градусах
называется шагом.
• При получении команды логическая цепь определяет,
какая фаза должна быть задействована и посылает
сигнал управления на электронный коммутатор,
определяющий значение тока ШД
• Логическая схема обычно монтируется из
транзисторных элементов или интегральных схем.
• Если выходной потенциал логической схемы высокий,
возбуждается соответствующая фаза обмотки, например
фаза «I». Если выходной потенциал низкий, фаза
11
обмотки с этим номером отключается.
12.
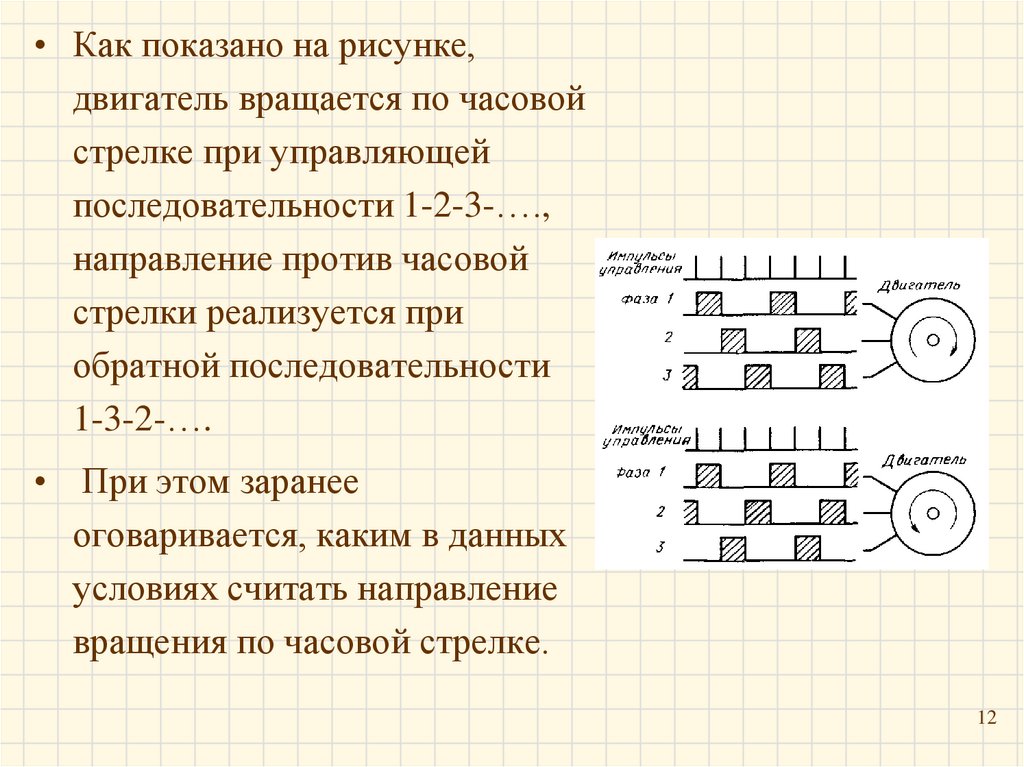
• Как показано на рисунке,двигатель вращается по часовой
стрелке при управляющей
последовательности 1-2-3-….,
направление против часовой
стрелки реализуется при
обратной последовательности
1-3-2-….
• При этом заранее
оговаривается, каким в данных
условиях считать направление
вращения по часовой стрелке.
12
13. Шаг и инкремент
• В некоторых периферийных устройствах ЭВМ данныезаписываются на восемь дорожек на бумажной ленте; это
означает, что на одной линии может быть восемь сигнальных
отверстий.
• В дополнение к этому между третьей и четвертой дорожками
идут синхронизирующие перфорационные отверстия.
• Линии символов располагаются с интервалом в 2,54 мм (1”).
• Когда на ленту заносятся данные, она
продвигается на 2,54 мм,
останавливается для перфорации
линии символа, затем продвигается на
следующие 2,54 мм, останавливается
опять и т.д.
13
14.
• Таким образом, самый простой способ управлениядвижением ленты — это использование одиночных
импульсов для логической схемы, когда двигатель за
один шаг поворачивает звёздочку на угол,
эквивалентный этому шагу, т.е. продвигает ленту на
2,54 мм.
• Другой способ — поворот ШД на несколько шагов
для продвижения ленты на одну линию. Например,
можно использовать четырёхфазный двигатель с
шагом 1,8°, передвигающий ленту к следующей
линии за четыре шага.
• Диаметр звёздочки уменьшается в четыре раза, и в
результате момент инерции уменьшается в 44 = 256
раз по сравнению с одношаговым передвижением. 14
15.
• Одно движение на 2,54 мм, которое переводитленту к следующей линии, как в приведённом
выше примере, называют инкрементом
(приращением) . Один инкремент может
выполняться за один шаг в первом примере и за
четыре шага в последнем.
• В системе когда двигатель останавливается на
определенное время после выполнения одного
инкремента движения, а затем цикл повторяется.
• Такой тип движения называется инкрементным
движением, а управление, соответствующее ему,
управлением инкрементным управлением.
15
16.
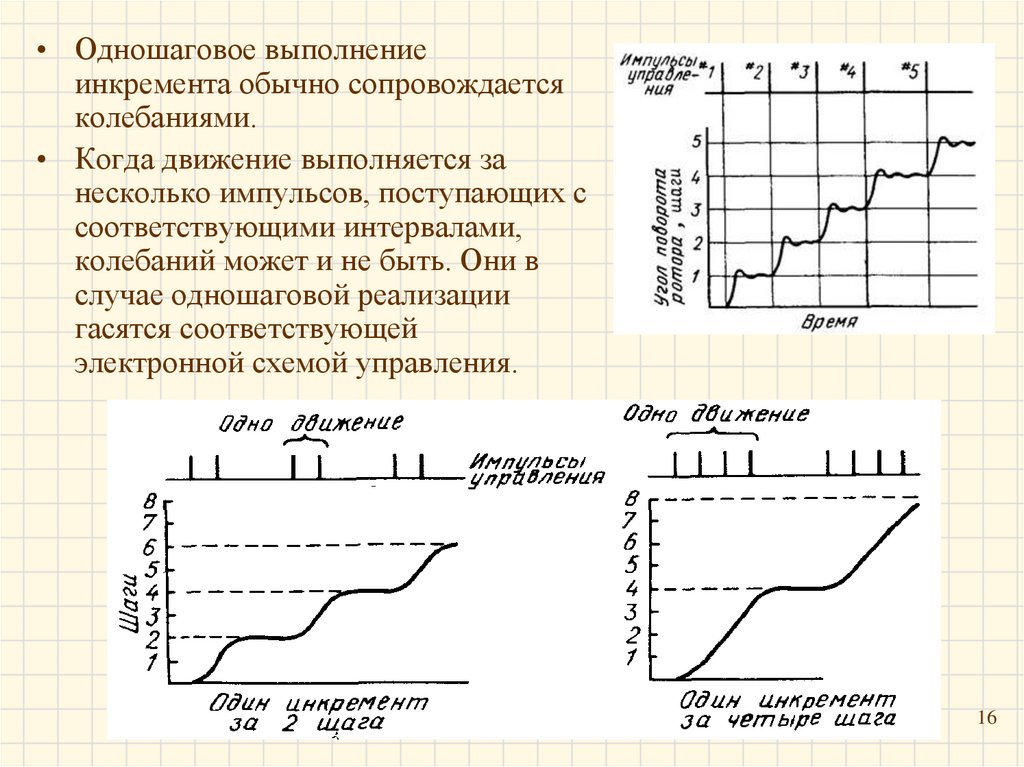
• Одношаговое выполнениеинкремента обычно сопровождается
колебаниями.
• Когда движение выполняется за
несколько импульсов, поступающих с
соответствующими интервалами,
колебаний может и не быть. Они в
случае одношаговой реализации
гасятся соответствующей
электронной схемой управления.
16
17. Особенности применения ШД, параметры
ОСОБЕННОСТИПРИМЕНЕНИЯ ШД,
ПАРАМЕТРЫ
17
18. Маленький угол шага
• Двигатель проворачивается за каждый импульсуправления на определенный фиксированный угол.
• Чем меньше шаг, тем большая частота вращения может
быть достигнута.
• Одной из особенностей ШД является то, что они могут
обеспечивать маленький шаг. Количество шагов за один
оборот называется шаговым числом. Соотношение
между углом шага Θ