


 electronics
electronicsSimilar presentations:


")
")






Принцип действия каналов индикации и опознавания (лекция 6)
1.
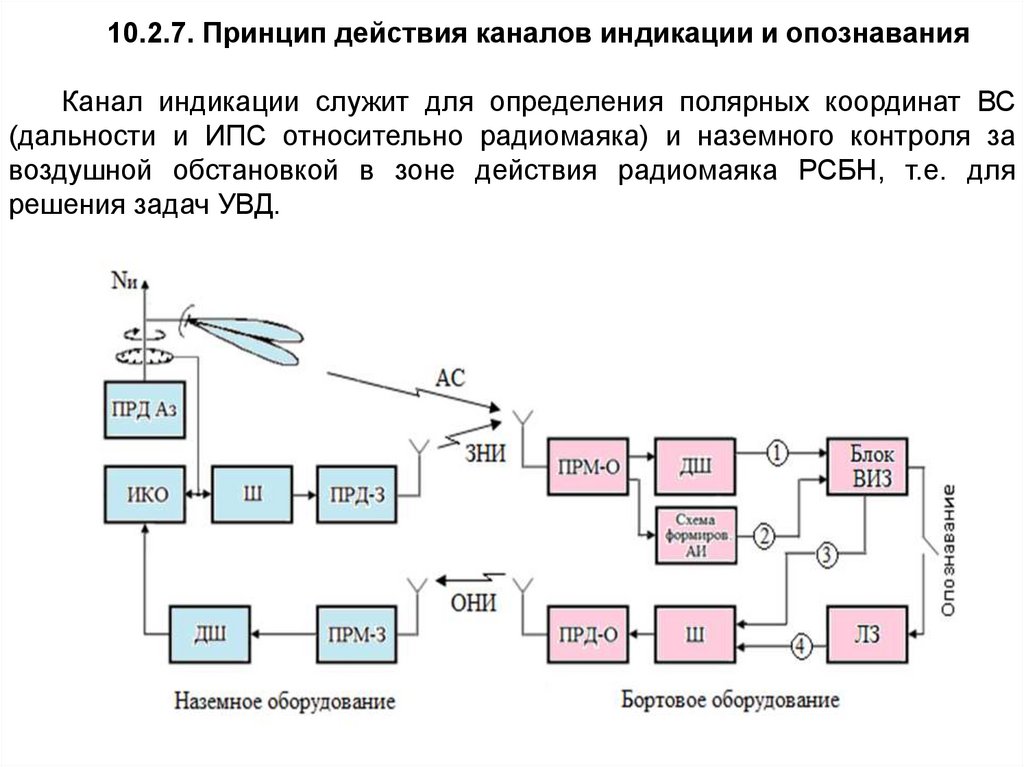
10.2.7. Принцип действия каналов индикации и опознаванияКанал индикации служит для определения полярных координат ВС
(дальности и ИПС относительно радиомаяка) и наземного контроля за
воздушной обстановкой в зоне действия радиомаяка РСБН, т.е. для
решения задач УВД.
2.
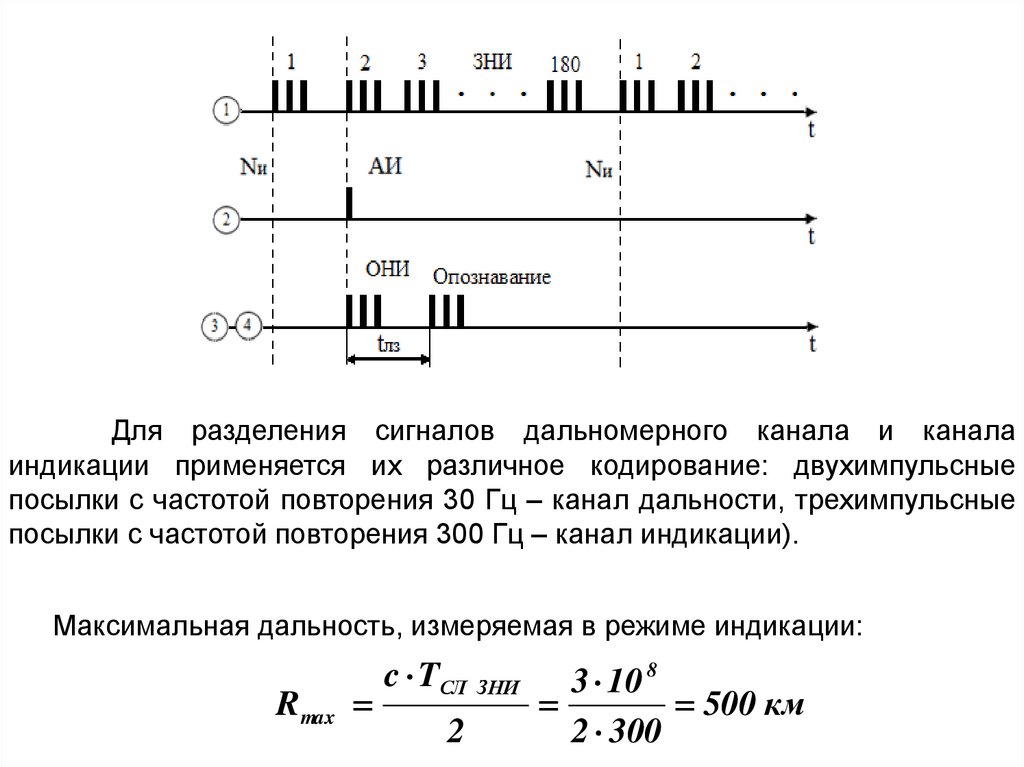
Для разделения сигналов дальномерного канала и каналаиндикации применяется их различное кодирование: двухимпульсные
посылки с частотой повторения 30 Гц – канал дальности, трехимпульсные
посылки с частотой повторения 300 Гц – канал индикации).
Максимальная дальность, измеряемая в режиме индикации:
R max
c TСЛ ЗНИ
2
3 10 8
500 км
2 300
3.
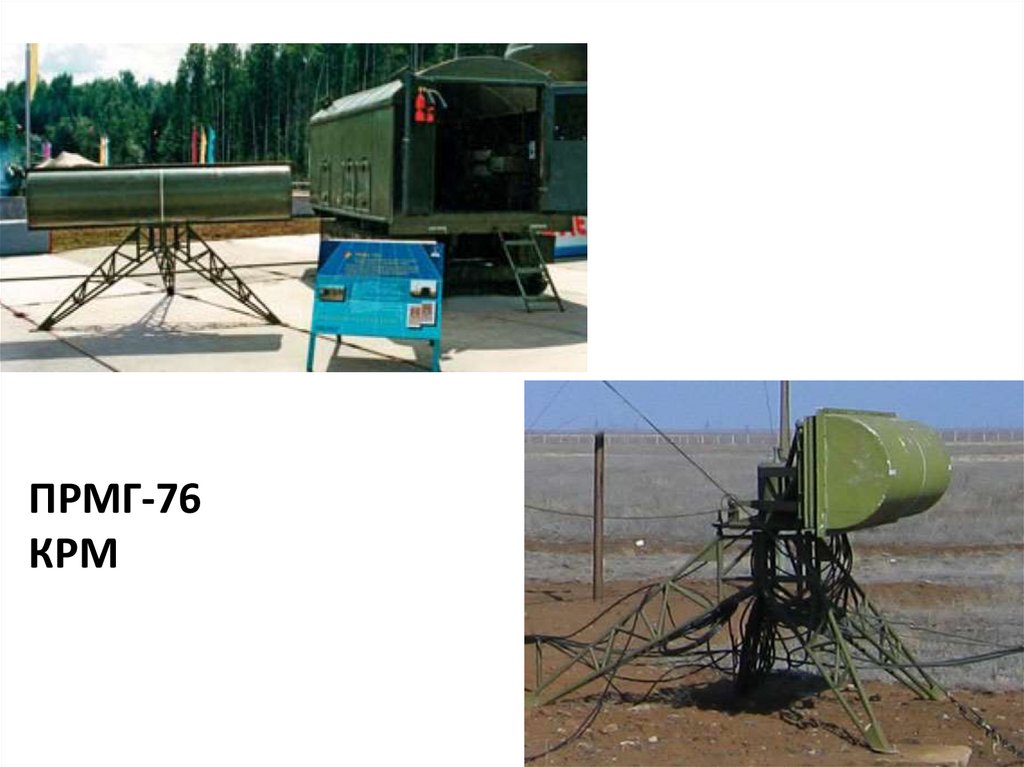
10.2.8. Посадочная радиомаячная группаПРМГ предназначена для вывода самолетов, оборудованных бортовой
аппаратурой РСБН, на ВПП аэродрома при минимумах погоды 1 и 2
категорий при ручном, директорном и автоматическом управлении ВС.
В состав ПРМГ входят дальномерно-курсовой радиомаяк (ДКРМ) и
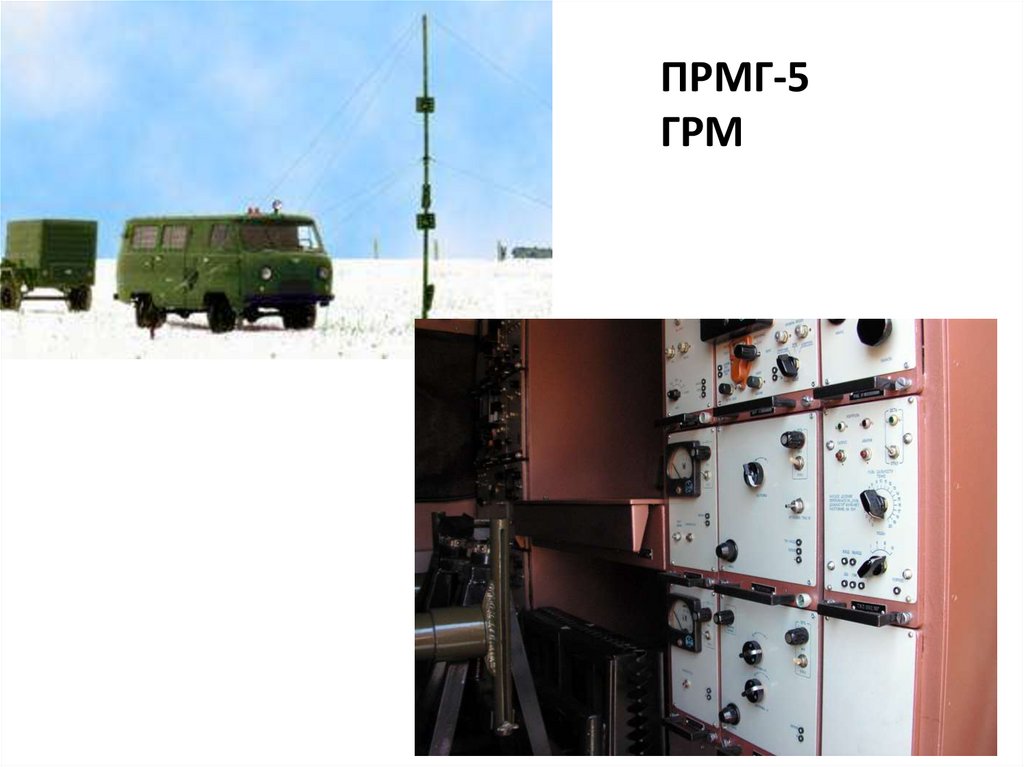
глиссадный радиомаяк (ГРМ).
ДКРМ состоит из курсового радиомаяка (КРМ) и ретранслятора
дальномера (РД).
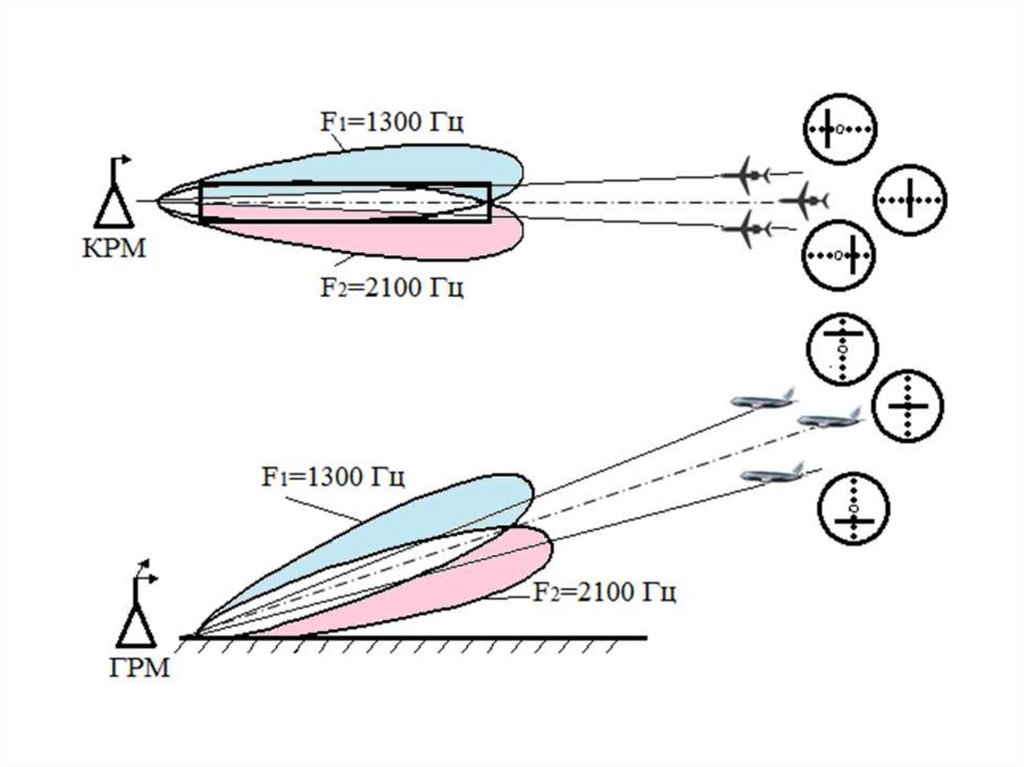
Радиомаяки КРМ и ГРМ по своему принципу действия одинаковы. Они
создают в пространстве равносигнальную зону приема двух сигналов с
частотами модуляции 1300 и 2100 Гц.
Зона курса создается КРМ в горизонтальной плоскости в направлении
оси ВПП, зона глиссады создается ГРМ в вертикальной плоскости под
углом планирования самолета (угол наклона глиссады).
4.
5.
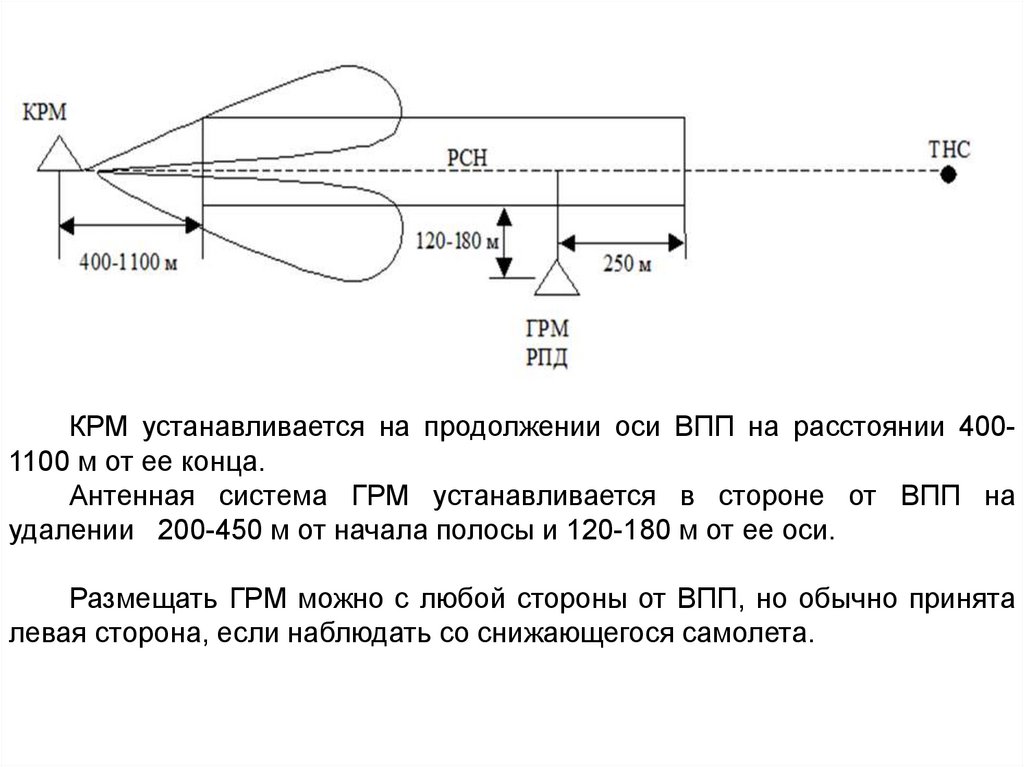
КРМ устанавливается на продолжении оси ВПП на расстоянии 4001100 м от ее конца.Антенная система ГРМ устанавливается в стороне от ВПП на
удалении 200-450 м от начала полосы и 120-180 м от ее оси.
Размещать ГРМ можно с любой стороны от ВПП, но обычно принята
левая сторона, если наблюдать со снижающегося самолета.
6.
Командно-пилотажный прибор7.
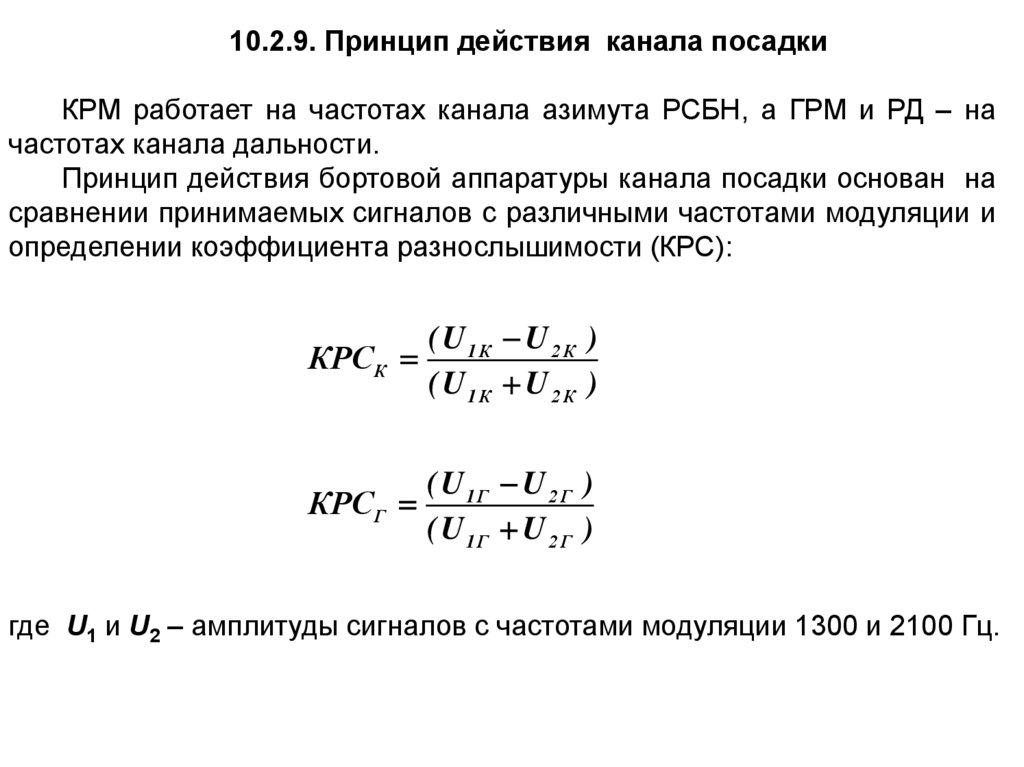
10.2.9. Принцип действия канала посадкиКРМ работает на частотах канала азимута РСБН, а ГРМ и РД – на
частотах канала дальности.
Принцип действия бортовой аппаратуры канала посадки основан на
сравнении принимаемых сигналов с различными частотами модуляции и
определении коэффициента разнослышимости (КРС):
КРС К
(U 1 К U 2 К )
(U 1 К U 2 К )
(U 1Г U 2 Г )
КРС Г
(U 1Г U 2 Г )
где U1 и U2 – амплитуды сигналов с частотами модуляции 1300 и 2100 Гц.
8.
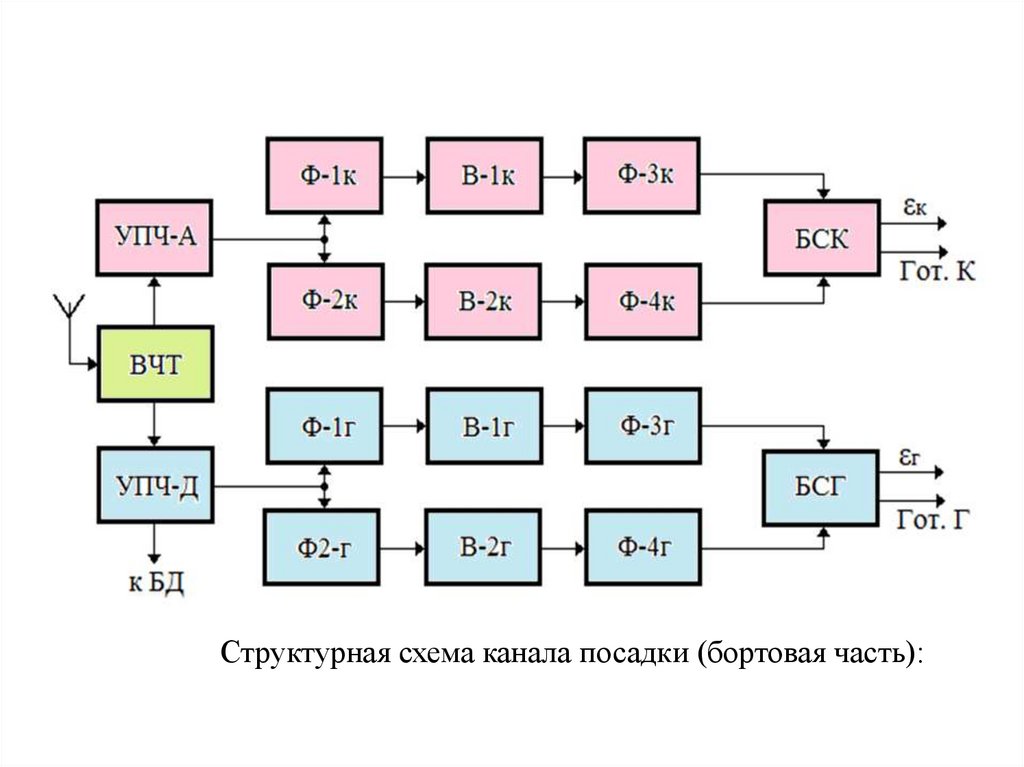
Структурная схема канала посадки (бортовая часть):9.
10.2.10. Режимы работы бортовой аппаратурыОсновные режимы работы аппаратуры РСБН:
- навигация, т.е. полет по запрограммированному маршруту;
- возврат на запрограммированный или незапрограммированный
аэродром;
- посадка;
- повторный заход на посадку:
- межсамолетная навигация (режим «Встреча», «ОВК»).
Режим «навигация» («маршрутный полет»)
В бортовой аппаратуре ВС измеряются наклонная дальность R до
радиомаяка и азимут относительно него, а также рассчитываются
дальность и заданный курс ψзад до выбранной точки маршрута. Режим
выполняется курсовым способом.
Режим
«навигация»
предполагает
полет
по
заранее
запрограммированному маршруту. Для этого в аппаратуре предварительно
программируются координаты аэродромов и промежуточных пунктов
маршрута (ППМ).
10.
Для аэродромов программируются:- ортодромические или геодезические координаты x, у или φ, λ;
- боковые выносы АДРМ относительно центра ВПП Z м;
- посадочные курсы ВПП ψВПП.
- углы схождения меридианов Δ (в аппаратуре, где программируются
геодезические координаты аэродромов φ, λ данный параметр
автоматически рассчитывается в процессоре);
- номера частотно-кодовых каналов (ЧКК) АДРМ и ПРМГ.
Для ППМ программируются только координаты x, у или φ, λ.
В современной бортовой аппаратуре (с цифровым процессором)
программируются координаты и параметры до 10 аэродромов и до 10
ППМ, а также координаты и параметры излучения наземных станций
РСДН.
11.
12.
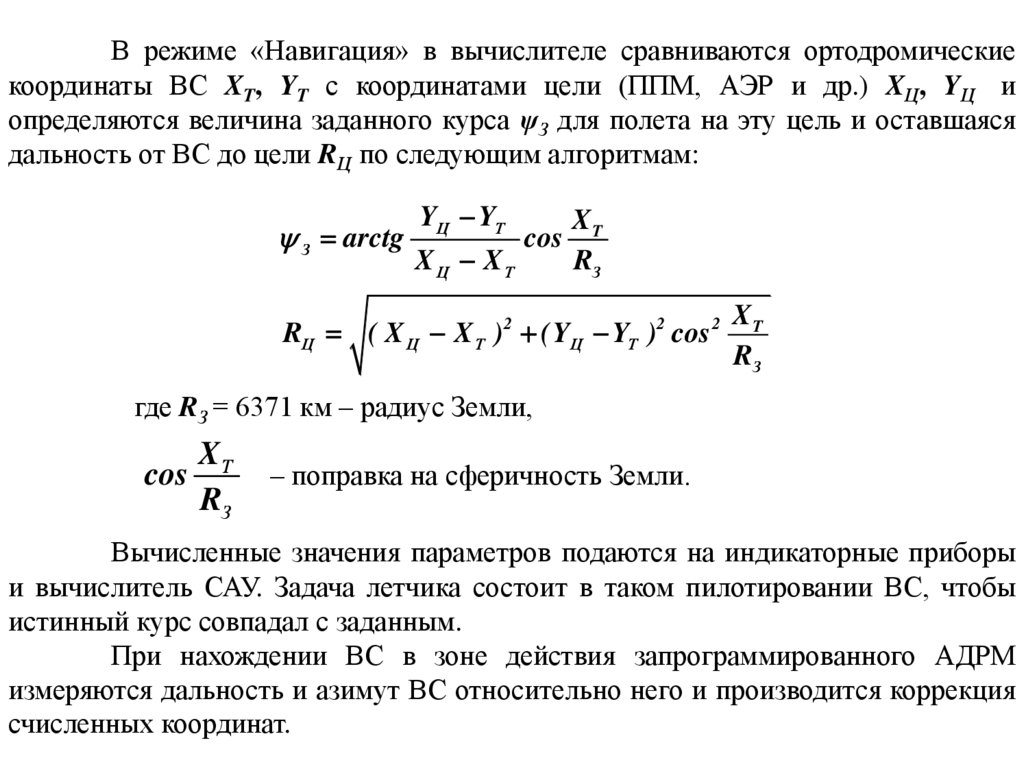
В режиме «Навигация» в вычислителе сравниваются ортодромическиекоординаты ВС XT, YT с координатами цели (ППМ, АЭР и др.) XЦ, YЦ и
определяются величина заданного курса ψЗ для полета на эту цель и оставшаяся
дальность от ВС до цели RЦ по следующим алгоритмам:
З arctg
YЦ YТ
X Ц XT
cos
XT
RЗ
RЦ ( X Ц X T )2 (YЦ YT )2 cos 2
XT
RЗ
где RЗ = 6371 км – радиус Земли,
XТ
cos
RЗ
– поправка на сферичность Земли.
Вычисленные значения параметров подаются на индикаторные приборы
и вычислитель САУ. Задача летчика состоит в таком пилотировании ВС, чтобы
истинный курс совпадал с заданным.
При нахождении ВС в зоне действия запрограммированного АДРМ
измеряются дальность и азимут ВС относительно него и производится коррекция
счисленных координат.
13.
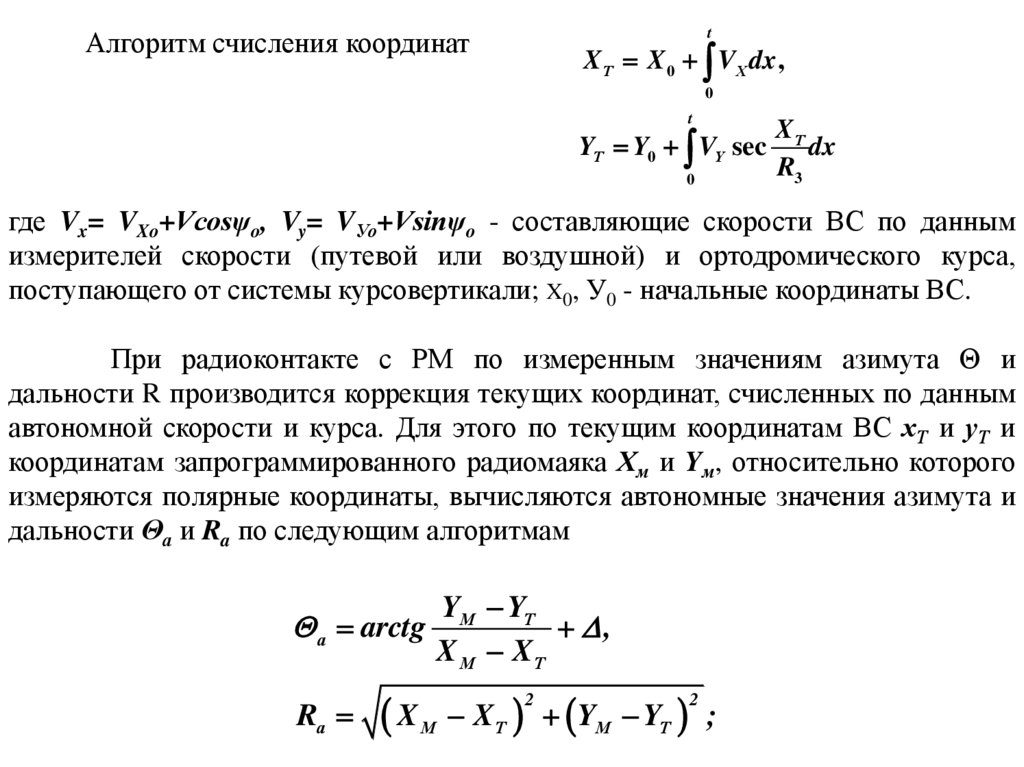
Алгоритм счисления координатt
X Т X 0 VX dx ,
0
t
YТ Y0 VY sec
0
XТ
dx
R3
где Vx= VXo+Vcosψo, Vy= VУо+Vsinψo - составляющие скорости ВС по данным
измерителей скорости (путевой или воздушной) и ортодромического курса,
поступающего от системы курсовертикали; X0, У0 - начальные координаты ВС.
При радиоконтакте с РМ по измеренным значениям азимута Θ и
дальности R производится коррекция текущих координат, счисленных по данным
автономной скорости и курса. Для этого по текущим координатам ВС хТ и уТ и
координатам запрограммированного радиомаяка Хм и Yм, относительно которого
измеряются полярные координаты, вычисляются автономные значения азимута и
дальности Θа и Ra по следующим алгоритмам
а arctg
Rа
YМ YТ
,
X М XТ
X М X Т YМ YТ ;
2
2
14.
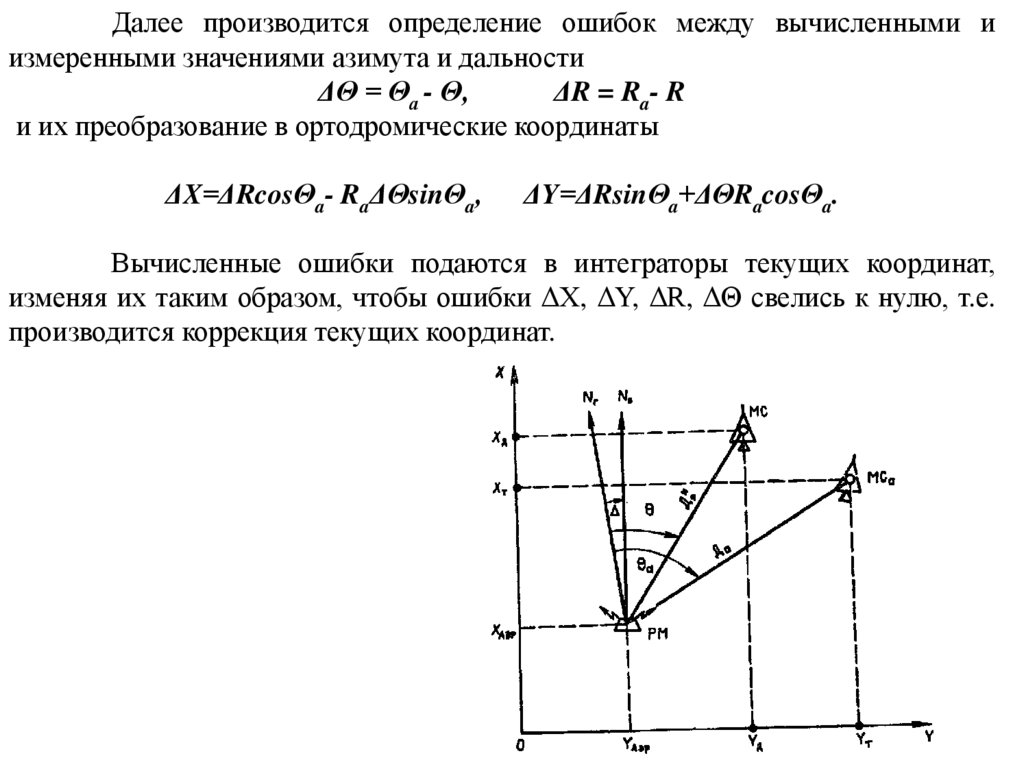
Далее производится определение ошибок между вычисленными иизмеренными значениями азимута и дальности
ΔΘ = Θа - Θ,
ΔR = Ra- R
и их преобразование в ортодромические координаты
ΔX=ΔRcosΘa- RaΔΘsinΘa,
ΔY=ΔRsinΘa+ΔΘRacosΘa.
Вычисленные ошибки подаются в интеграторы текущих координат,
изменяя их таким образом, чтобы ошибки ΔX, ΔY, ΔR, ΔΘ свелись к нулю, т.е.
производится коррекция текущих координат.
15.
Режим «Возврат»Различают режимы «Возврат на запрограммированный аэродром» и
«Возврат на не запрограммированный аэродром».
Режим «Возврат на запрограммированный аэродром» аналогичен режиму
работы «Навигация», но с дальности 250 км до аэродрома при наличии
радиоконтакта с АДРМ в бортовой аппаратуре включается подрежим «Возврат
радийный».
При этом в процессоре рассчитывается траектория снижения ВС и
выдаются сигналы траекторного управления в вертикальной плоскости.
Расчет траектории полета в горизонтальной плоскости (заданного курса)
производится с учетом запрограммированных бокового выноса АДРМ и угла
схождения меридианов.
В результате обеспечивается вывод ВС на этапе предпосадочного
маневрирования в точку начала снижения (ТНС).
16.
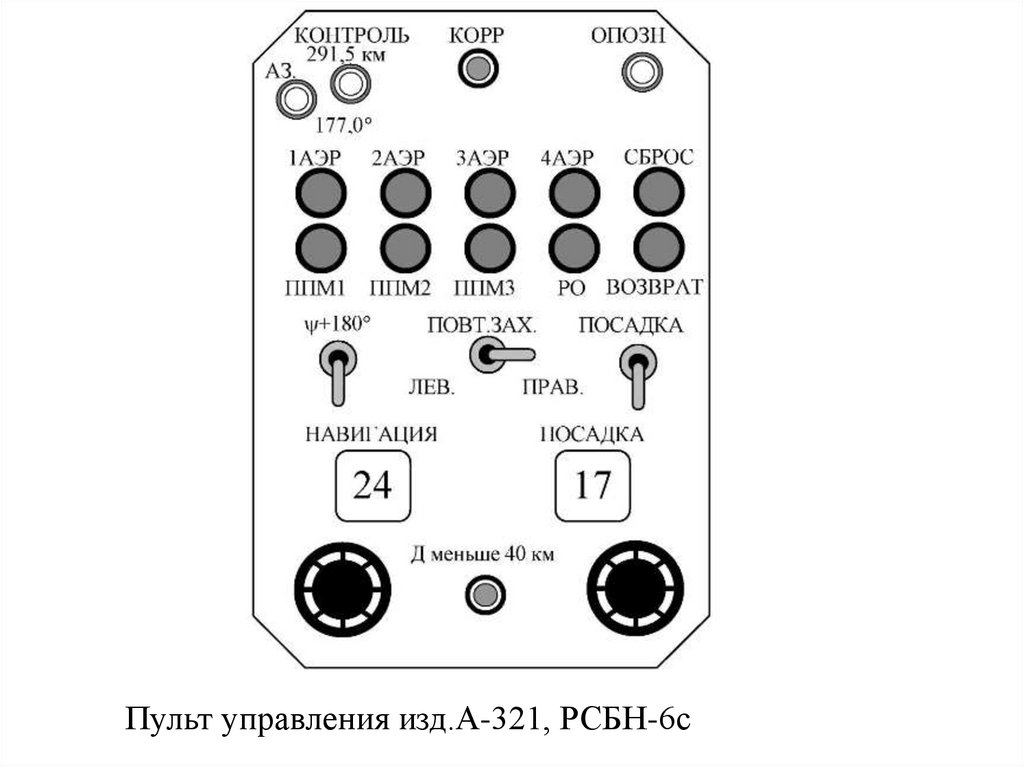
Пульт управления изд.А-321, РСБН-6с17.
Определение заданного курса в режиме «Возврат на незапрограммированный аэродром» на этапе до входа в зону действия АДРМ
выполняется летчиком с помощью полетной карты и данных о координатах ВС,
получаемых от бортовой навигационной системы.
После входа в зону действия АДРМ при наличии с ним радиоконтакта
измеряются и индицируются азимут ВС относительно РМ и наклонная дальность.
Выполнение предпосадочного маневра до входа в ТНС летчик выполняет
в режиме ручного пилотирования ВС.
18.
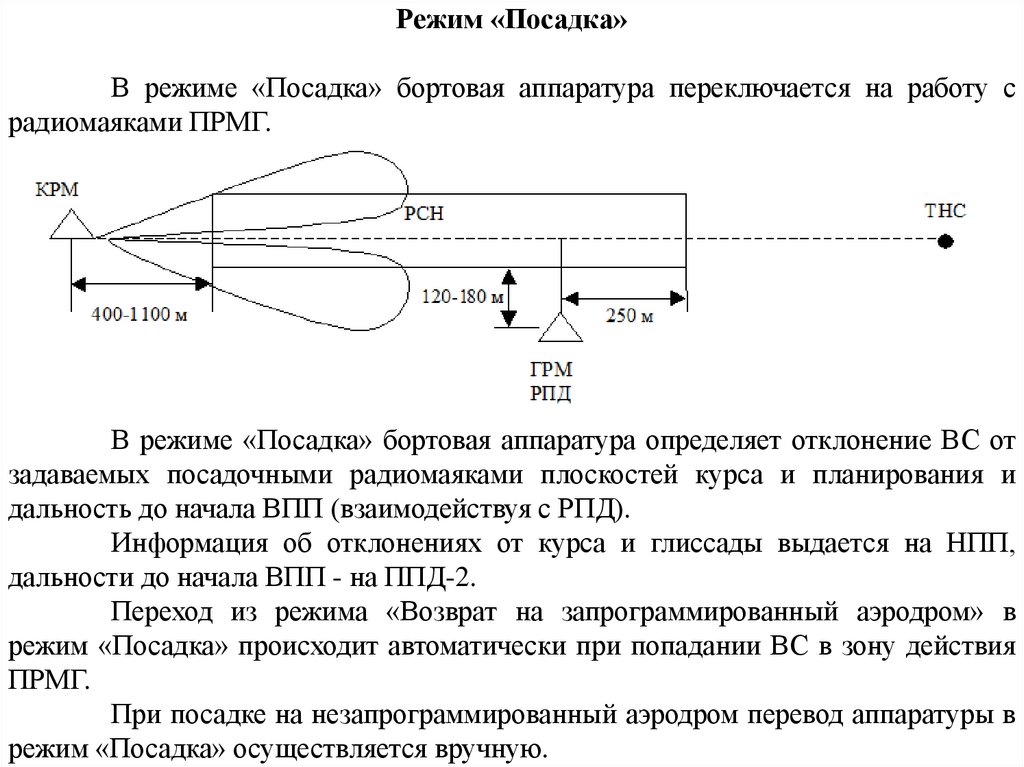
Режим «Посадка»В режиме «Посадка» бортовая аппаратура переключается на работу с
радиомаяками ПРМГ.
В режиме «Посадка» бортовая аппаратура определяет отклонение ВС от
задаваемых посадочными радиомаяками плоскостей курса и планирования и
дальность до начала ВПП (взаимодействуя с РПД).
Информация об отклонениях от курса и глиссады выдается на НПП,
дальности до начала ВПП - на ППД-2.
Переход из режима «Возврат на запрограммированный аэродром» в
режим «Посадка» происходит автоматически при попадании ВС в зону действия
ПРМГ.
При посадке на незапрограммированный аэродром перевод аппаратуры в
режим «Посадка» осуществляется вручную.
19.
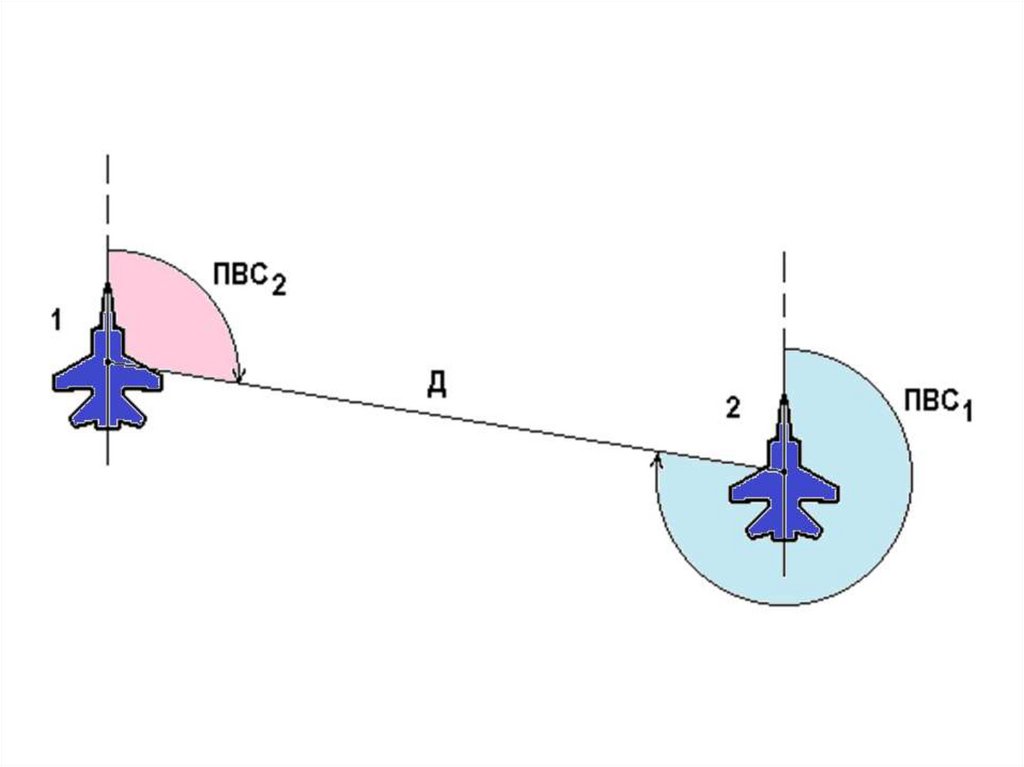
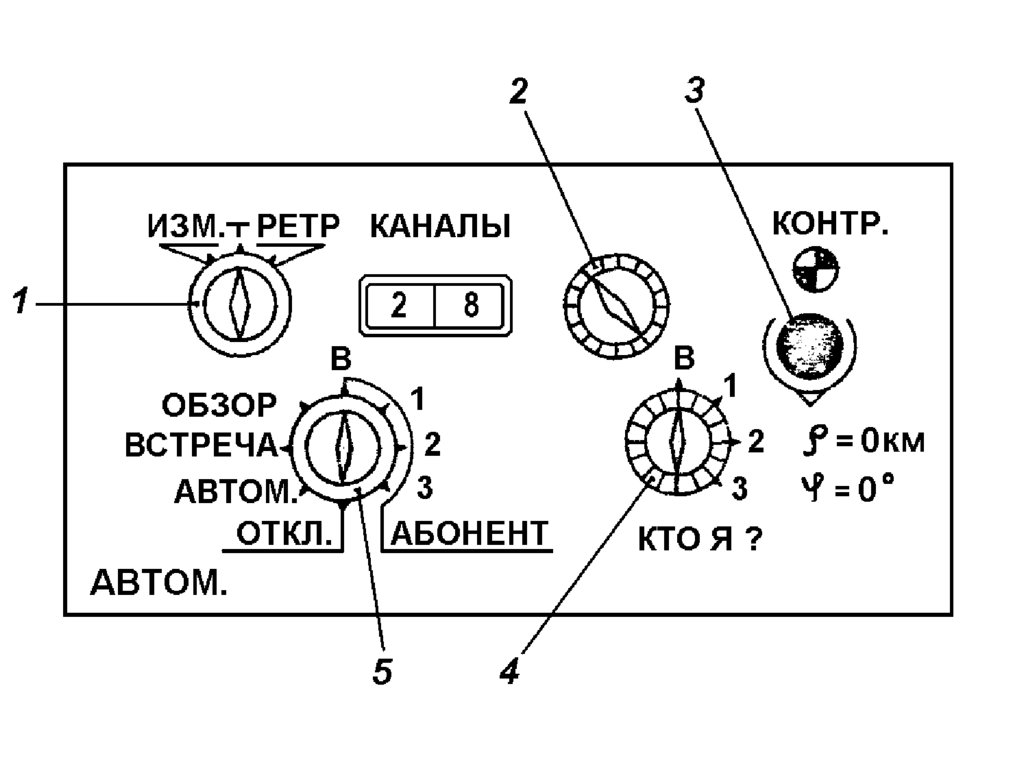
Режим «межсамолетная навигация»Режим «межсамолетная навигация» предусмотрен в отдельных типах
бортовой аппаратуры РСБН и предназначен для сбора ВС в группу (подрежим
«Встреча») и выполнения полета в боевых порядках (подрежим «ОВК»).
В режиме «ОВК» определяются пеленг и дальность до ведомого ВС на
ведущих. При этом аппаратура дальномерного канала ведущего работает в
режиме ретрансляции запросных сигналов.
Пеленг на ведущий самолет определяется амплитудным методом методом минимума при приеме сигнала ответа дальности разнесенными
антеннами.
20.
21.
22.
ПРМГ-5ГРМ
23.
ПРМГ-5КРМ
24.
ПРМГ-76КРМ