






 industry
industrySimilar presentations:


")







Детский технопарк «Кванториум». Робоквантум «Регуляторы»
1.
Детский технопарк «Кванториум»Робоквантум
«Регуляторы»
2.
Релейный регуляторСамый простой вид регулятора – релейный. Робот
мечется из стороны в сторону, пытаясь удержаться
на краю линии, на границе черного и белого.
3.
Чтобы узнать точное значение яркости отраженногосвета, робота надо поставить на границу линии и
посмотреть, какое значение покажет датчик.
Если датчик сдвинется влево, в сторону белого поля,
значения на датчике будут больше, его нужно
вернуть направо. И наоборот.
4.
Пропорциональный регулятор – это устройство, оказывающееуправляющее воздействие u(t) на объект пропорционального его
линейному отклонению e(t) от заданного состояния x0(t);
e(t) = x0(t) - x(t),
где x(t) – состояние в данный момент времени;
u(t) = k·e(t),
где k – усиливающий коэффициент.
То есть, чем дальше робот отклоняется от заданного курса, тем активнее
должны работать моторы, выравнивая его.
Движение по границе черного и белого тоже можно построить на
П-регуляторе. Робот все видит иначе, для него отсутствует резкая
граница между этими цветами. Можно сказать, он близорук и видит
градиентный переход оттенков серого.
5.
П-регулятор на одном датчикеРобот пытается ехать вдоль границы межу
черным и белым. Чем дальше он от нормального
положения, тем больше усилий нужно приложить,
чтобы вернуться.
Для того, чтобы рассчитать, как сильно нужно
повернуться, рассчитаем величину «ошибки».
Между белым и черным примерно 50%
освещенности. Ошибкой будет разность между
тем, что прямо сейчас видит робот и тем, что
должен видеть (50%).
Знак ошибки покажет, в какую сторону нужно
повернуться.
6.
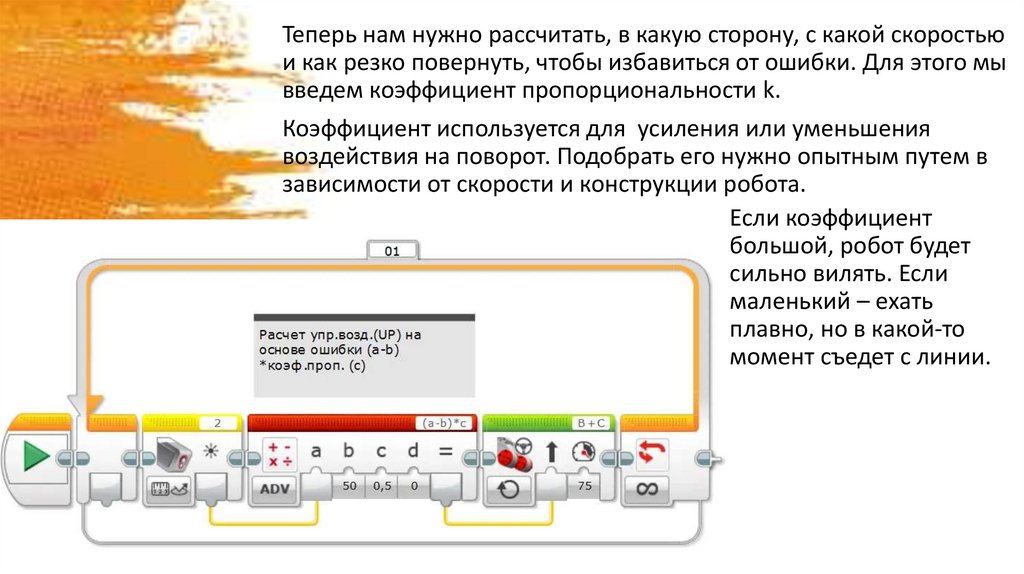
Теперь нам нужно рассчитать, в какую сторону, с какой скоростьюи как резко повернуть, чтобы избавиться от ошибки. Для этого мы
введем коэффициент пропорциональности k.
Коэффициент используется для усиления или уменьшения
воздействия на поворот. Подобрать его нужно опытным путем в
зависимости от скорости и конструкции робота.
Если коэффициент
большой, робот будет
сильно вилять. Если
маленький – ехать
плавно, но в какой-то
момент съедет с линии.
7.
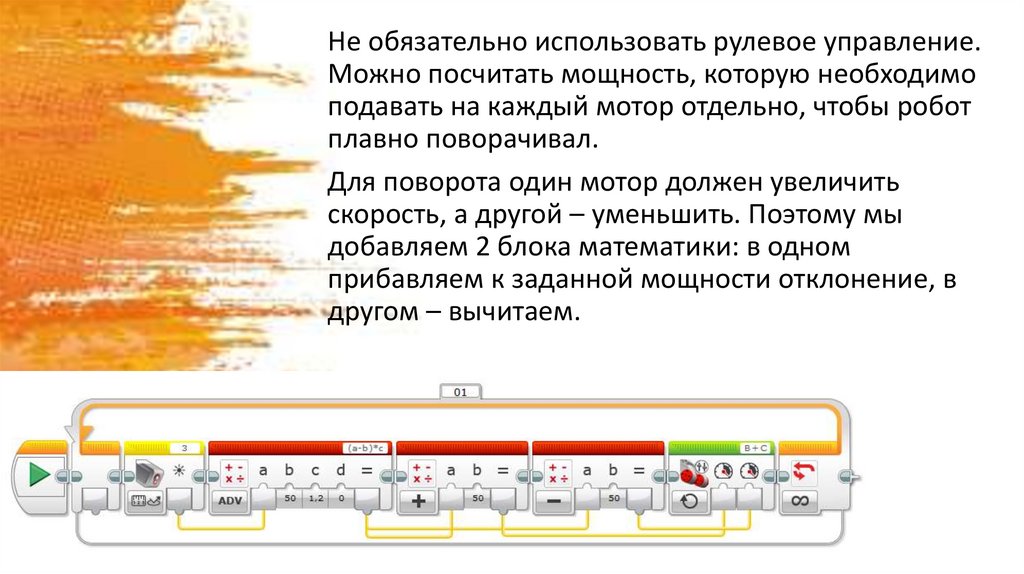
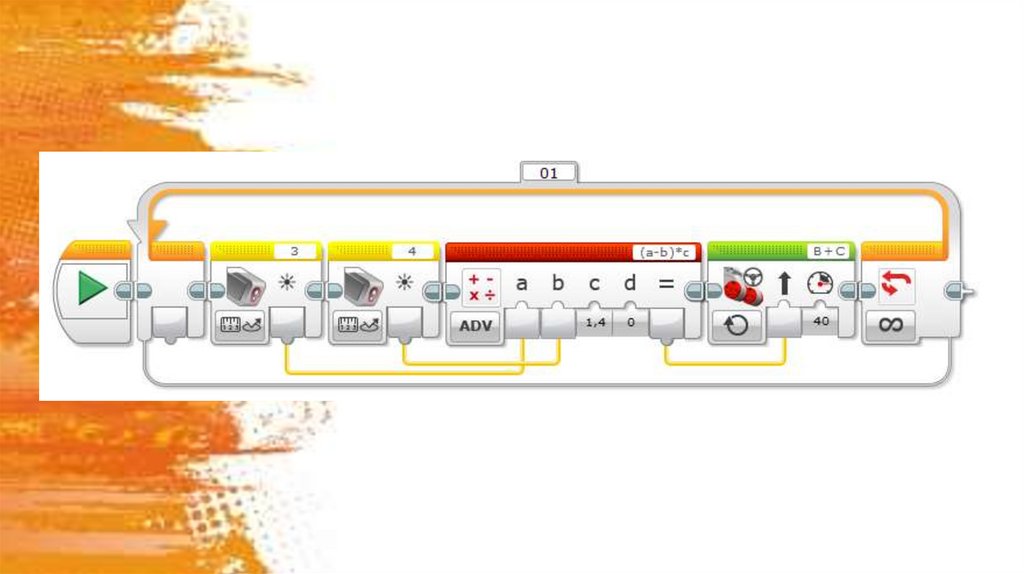
Не обязательно использовать рулевое управление.Можно посчитать мощность, которую необходимо
подавать на каждый мотор отдельно, чтобы робот
плавно поворачивал.
Для поворота один мотор должен увеличить
скорость, а другой – уменьшить. Поэтому мы
добавляем 2 блока математики: в одном
прибавляем к заданной мощности отклонение, в
другом – вычитаем.
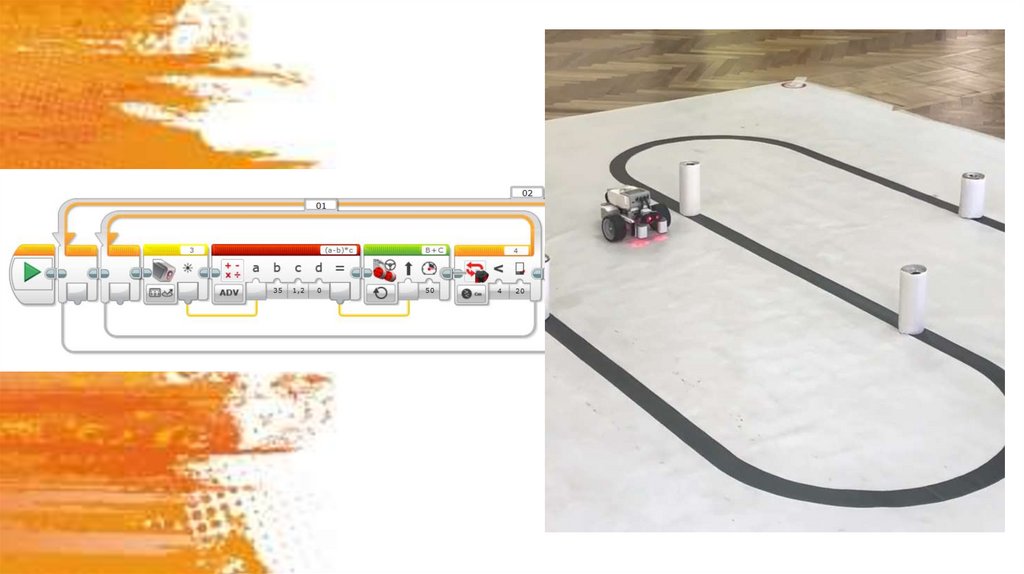
8.
Объезд препятствийна траектории
9.
Назовите формулу п-регулятора и чтоскрывается за каждой буквой
10.
Как прервать цикл езды по линии,если нужно объехать препятствие?
11.
12.
13.
Коэффициент, как и базовая скорость, задаются исходя изкрутизны траектории. Чем круче повороты на траектории, тем
больше должен быть коэффициент усиления линейного
регулятора
При слишком высоком усиливающем коэффициенте поведение
робота постоянно заносит из стороны в сторону.
При низком коэффициенте робот может потерять линию. Для
достижения наибольшего эффекта следует найти
оптимальное соотношение конструкции робота, базовой
мощности и усиливающего коэффициента.
14.
15.
16.
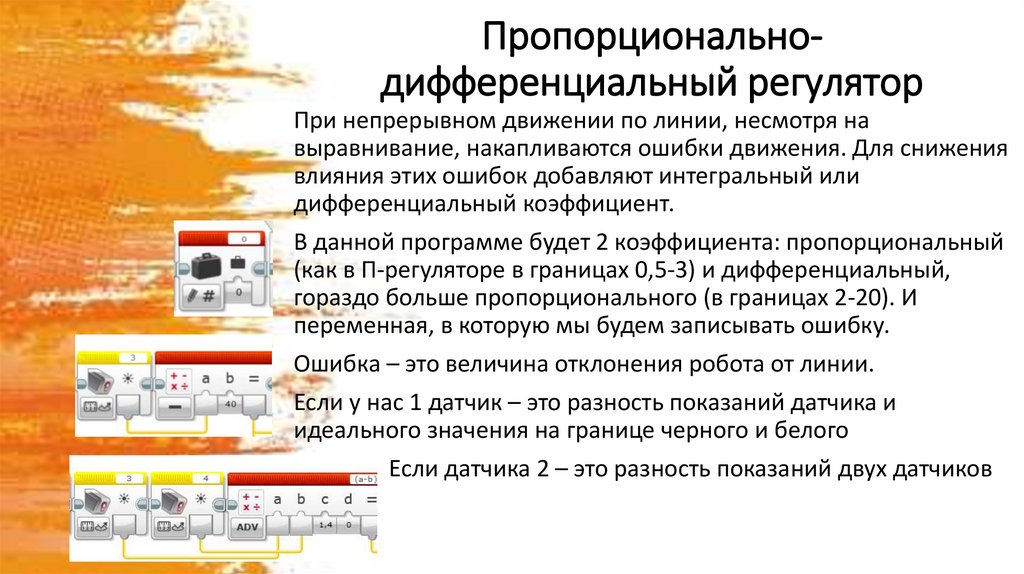
Пропорциональнодифференциальный регуляторПри непрерывном движении по линии, несмотря на
выравнивание, накапливаются ошибки движения. Для снижения
влияния этих ошибок добавляют интегральный или
дифференциальный коэффициент.
В данной программе будет 2 коэффициента: пропорциональный
(как в П-регуляторе в границах 0,5-3) и дифференциальный,
гораздо больше пропорционального (в границах 2-20). И
переменная, в которую мы будем записывать ошибку.
Ошибка – это величина отклонения робота от линии.
Если у нас 1 датчик – это разность показаний датчика и
идеального значения на границе черного и белого
Если датчика 2 – это разность показаний двух датчиков
17.
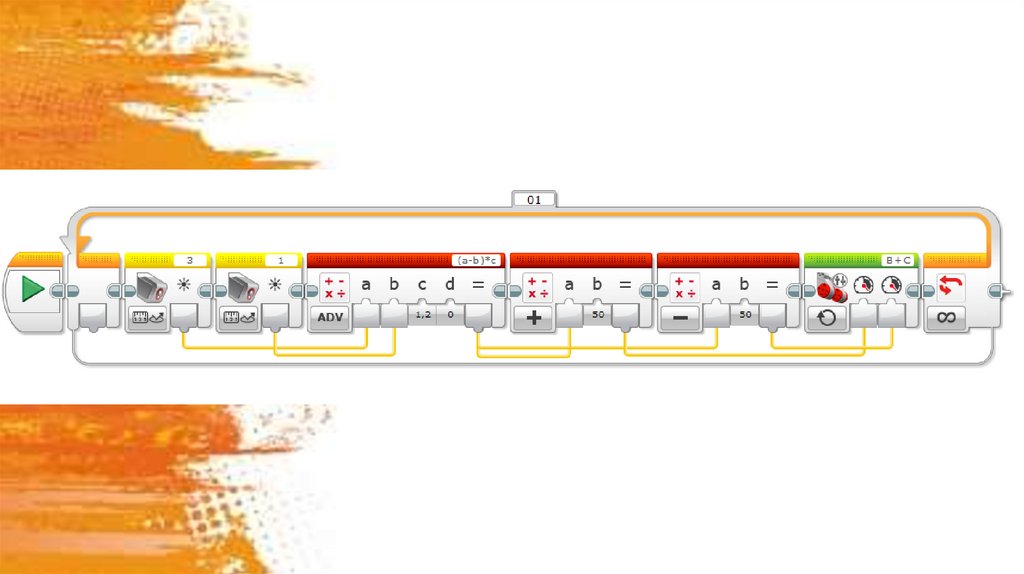
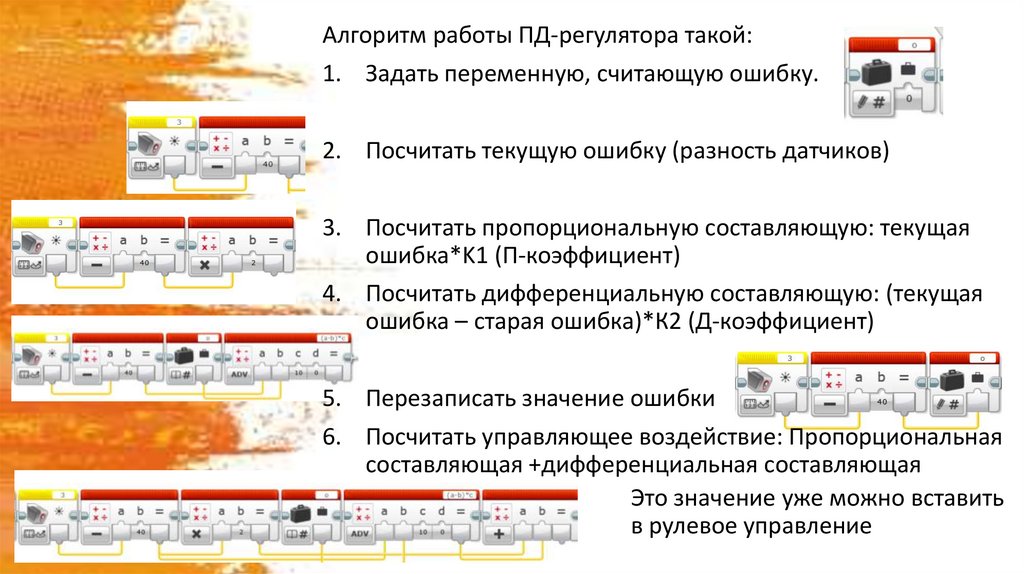
Алгоритм работы ПД-регулятора такой:1. Задать переменную, считающую ошибку.
2. Посчитать текущую ошибку (разность датчиков)
3. Посчитать пропорциональную составляющую: текущая
ошибка*K1 (П-коэффициент)
4. Посчитать дифференциальную составляющую: (текущая
ошибка – старая ошибка)*К2 (Д-коэффициент)
5. Перезаписать значение ошибки
6. Посчитать управляющее воздействие: Пропорциональная
составляющая +дифференциальная составляющая
Это значение уже можно вставить
в рулевое управление
18.
Для удобства, математические вычисления можно сократить до двухблоков математики: в одном считаем ошибку, в другом – все
управляющее воздействие.
Дифференциальный коэффициент особенно
полезен на резких поворотах, когда робот не
успеет выровняться сам.
a – ошибка (текущие показания датчика – идеальные)
b – пропорциональный коэффициент
c – предыдущая ошибка из переменной
d - дифференциальный коэффициент
(a*b) – пропорциональная составляющая
(а-с)*d – дифференциальная составляющая
19.
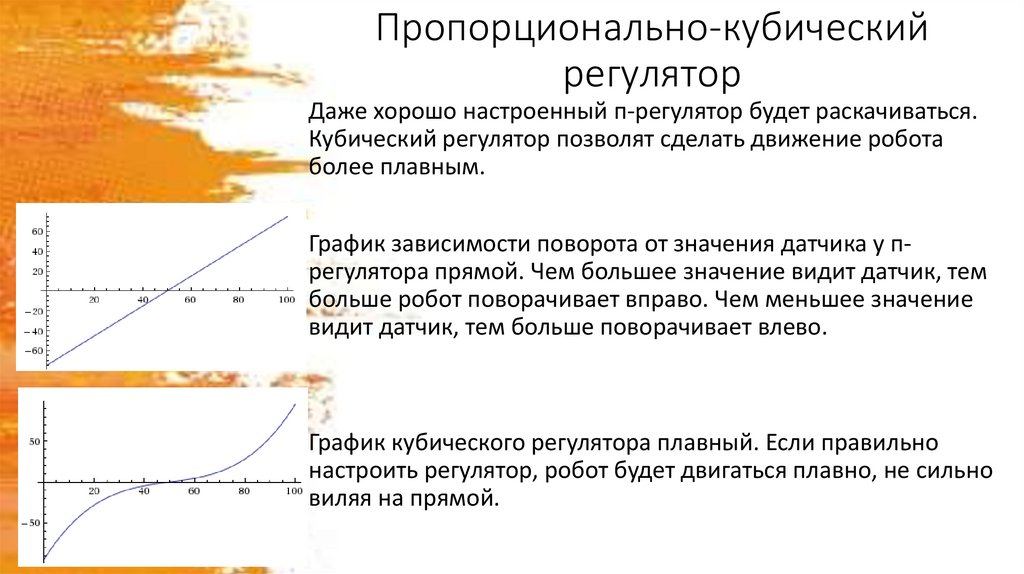
Пропорционально-кубическийрегулятор
Даже хорошо настроенный п-регулятор будет раскачиваться.
Кубический регулятор позволят сделать движение робота
более плавным.
График зависимости поворота от значения датчика у прегулятора прямой. Чем большее значение видит датчик, тем
больше робот поворачивает вправо. Чем меньшее значение
видит датчик, тем больше поворачивает влево.
График кубического регулятора плавный. Если правильно
настроить регулятор, робот будет двигаться плавно, не сильно
виляя на прямой.
20.
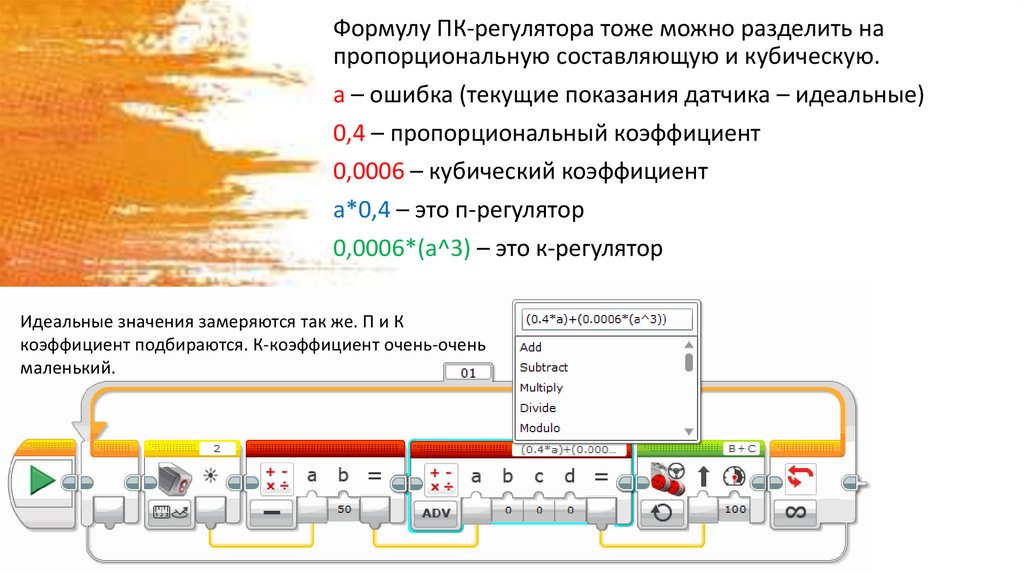
Формулу ПК-регулятора тоже можно разделить напропорциональную составляющую и кубическую.
a – ошибка (текущие показания датчика – идеальные)
0,4 – пропорциональный коэффициент
0,0006 – кубический коэффициент
a*0,4 – это п-регулятор
0,0006*(a^3) – это к-регулятор
Идеальные значения замеряются так же. П и К
коэффициент подбираются. К-коэффициент очень-очень
маленький.