





 programming
programmingSimilar presentations:

")
")






")
Робо Универ. Уровень 11. Занятие 10
1.
Включили камеру?1
2.
Проверяем явки2
3.
4.
СегодняНаучим ездить робота по линии
4
5.
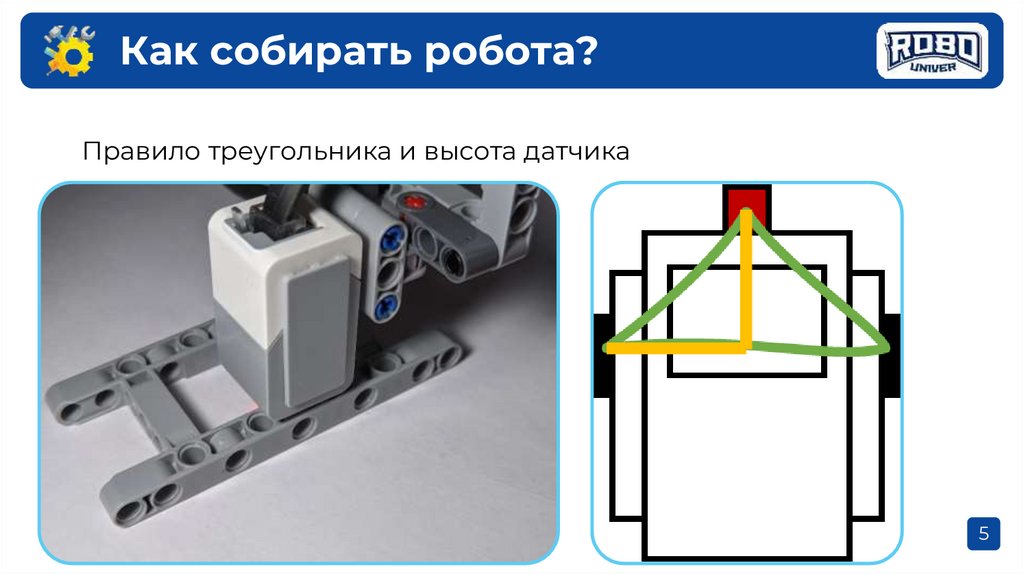
Как собирать робота?Правило треугольника и высота датчика
5
6.
СборкаРобот для езды по линии
Датчик
цвета
2 больших
мотора
6
7.
7 ммКак работает датчик?
15 мм
7
8.
Принцип работыКак видим мы
vs
Как видит датчик
8
9.
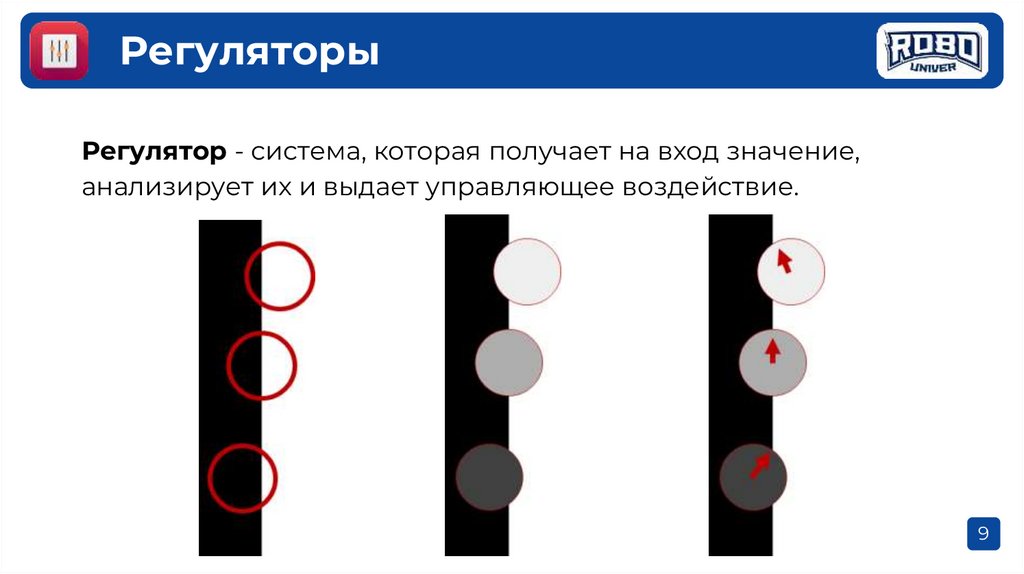
РегуляторыРегулятор - система, которая получает на вход значение,
анализирует их и выдает управляющее воздействие.
9
10.
Задача 1Измерить значение белого и черного цветов, посчитать
значение серого.
Серый = (черный+белый)/2
10
11.
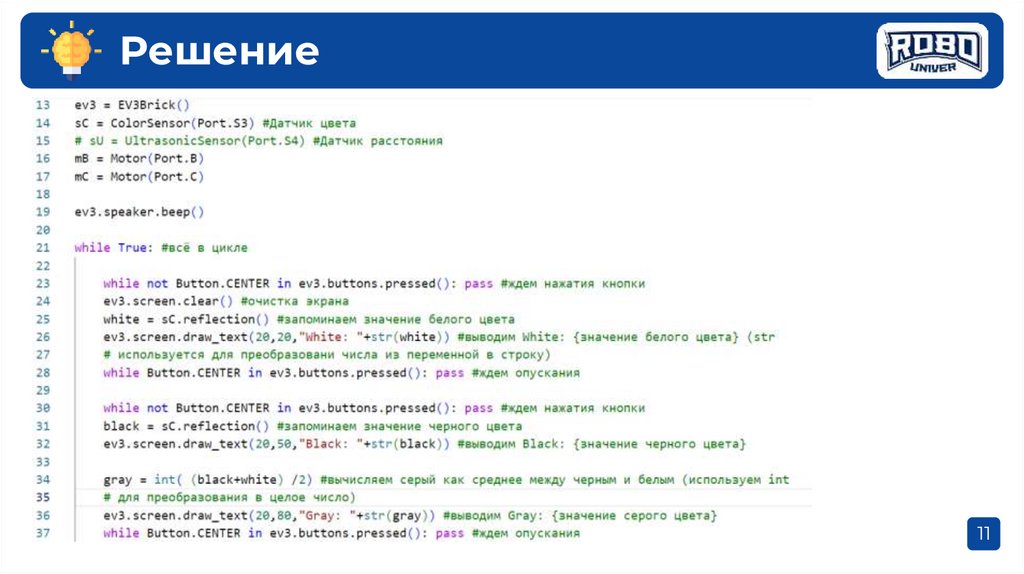
Решение11
12.
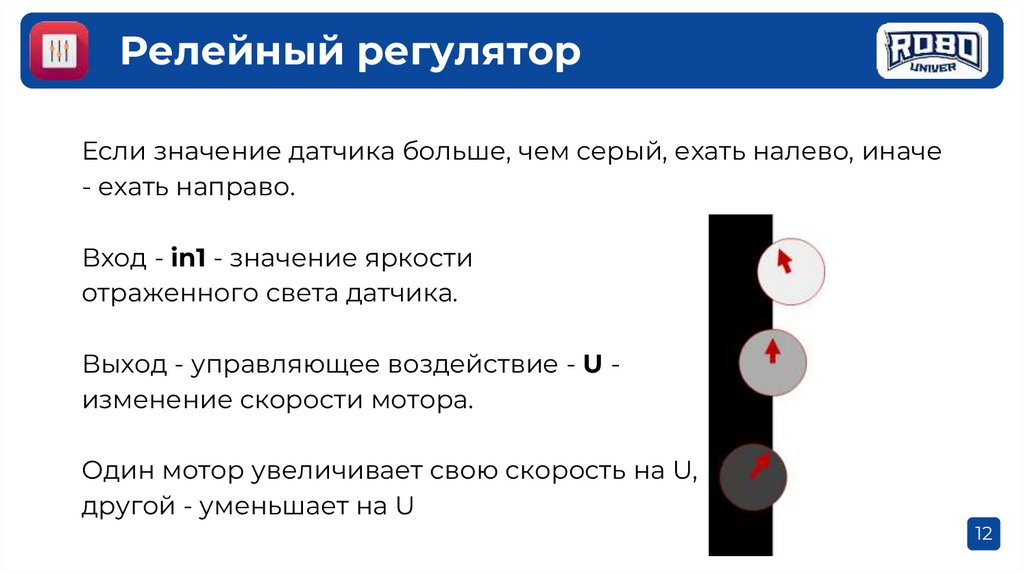
Релейный регуляторЕсли значение датчика больше, чем серый, ехать налево, иначе
- ехать направо.
Вход - in1 - значение яркости
отраженного света датчика.
Выход - управляющее воздействие - U изменение скорости мотора.
Один мотор увеличивает свою скорость на U,
другой - уменьшает на U
12
13.
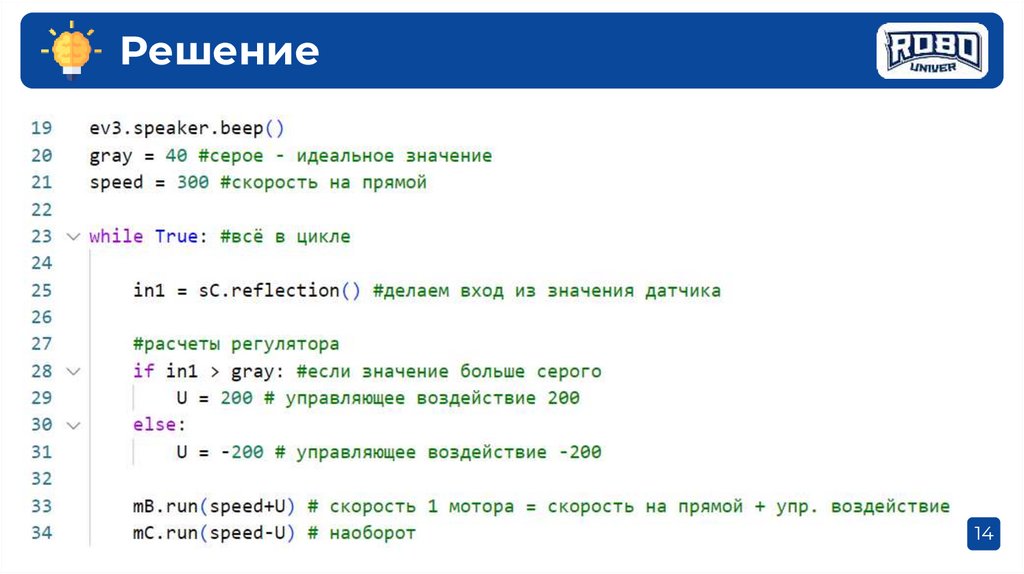
Задача 2Реализовать релейный регулятор для движения по линии.
Если значение датчика больше серого - ехать влево, иначе вправо.
13
14.
Решение14
15.
Перерыв15
16.
Узнаем новое!регулятор ---------
regulator
(controller)
ошибка ------------
закладка ------------
bookmark
направление ------
direction
воздействие -------
impact
error
(mistake)
исключение ------
exception
(effect)
настройка ----------
оба -------------------
both
setup
16
17.
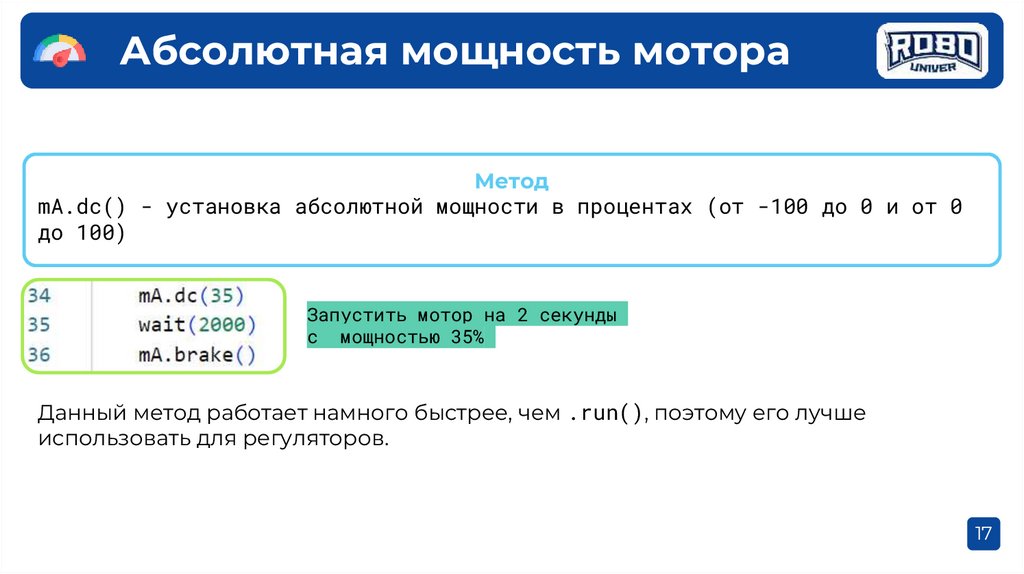
Абсолютная мощность мотораМетод
mA.dc() - установка абсолютной мощности в процентах (от -100 до 0 и от 0
до 100)
Запустить мотор на 2 секунды
с мощностью 35%
Данный метод работает намного быстрее, чем .run(), поэтому его лучше
использовать для регуляторов.
17
18.
Задача 3Переделать регулятор из прошлой работы используя
абсолютною мощность мотора.
mA.dc() - установка абсолютной мощности в процентах (от -100 до 0 и
от 0 до 100)
18
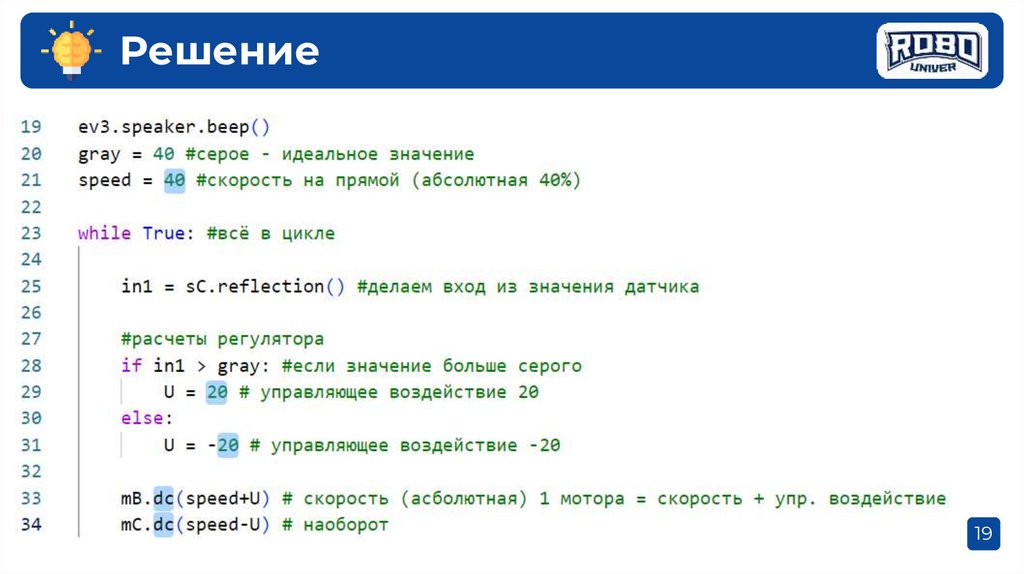
19.
Решение19
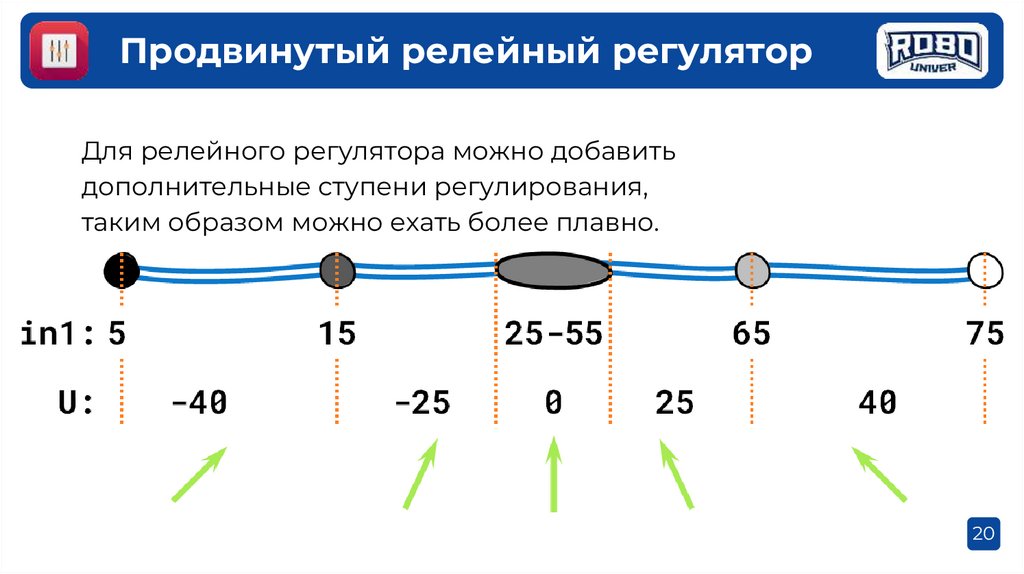
20.
Продвинутый релейный регуляторДля релейного регулятора можно добавить
дополнительные ступени регулирования,
таким образом можно ехать более плавно.
20
21.
Смотрим пример!21
22.
Задача 4А) Добавьте ступень езды прямо (от серый-15 до серый+15)
Б) Добавьте ступени резкого поворота (ближе к черному и
белому).
22
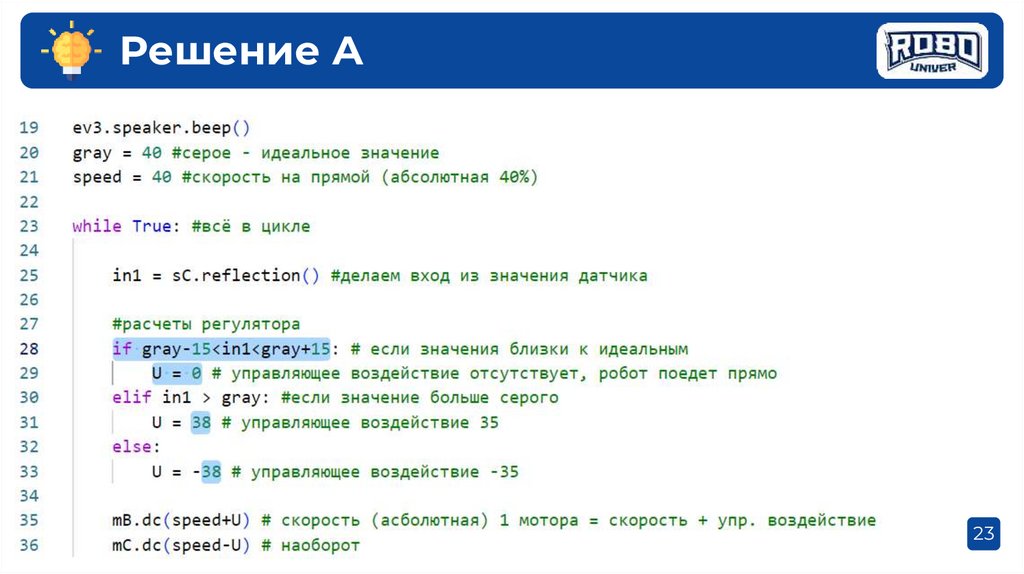
23.
Решение А23
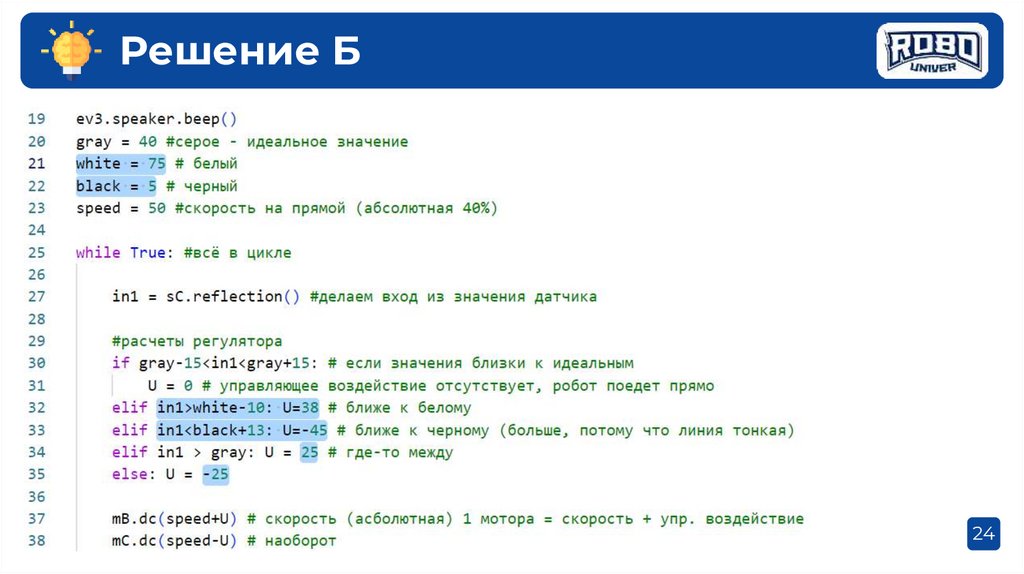
24.
Решение Б24
25.
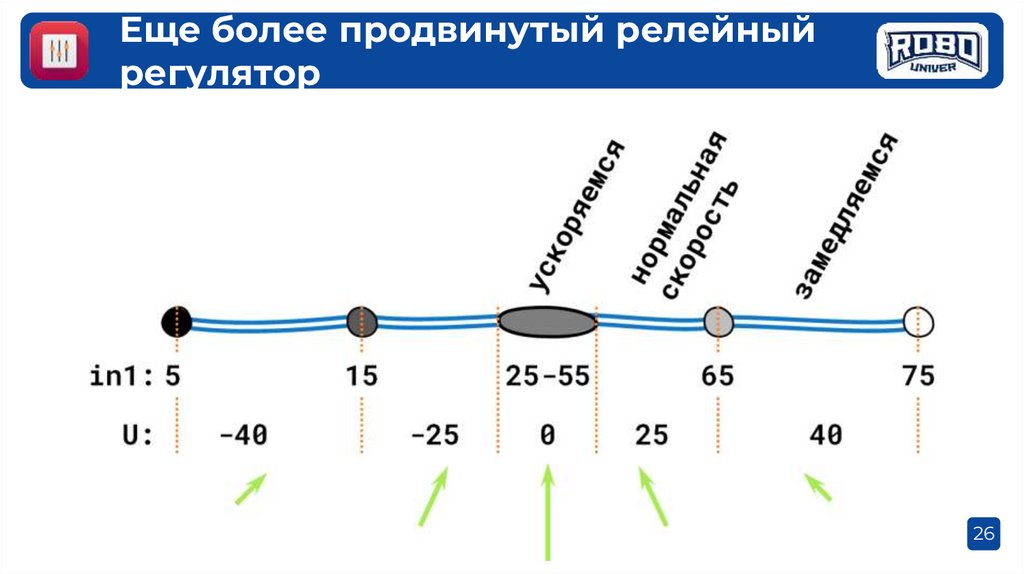
Еще более продвинутый релейныйрегулятор
Если участок прямой - ехать и регулировать проще, поэтому
можно ехать быстрее, и наоборот.
Управляющее воздействие ↑↓ Скорость.
U2 - компонента общего изменения скорости, на нее будем
умножать полученную скорость.
Если управляющее воздействие по модулю abs(U) < 10 , то
U2 = 1.2.
Если мы умножим скорость на 1.2, она станет немного больше.
25
26.
Еще более продвинутый релейныйрегулятор
26
27.
Задача 5А) Добавьте компоненту общего изменения скорости U2,
которая будет:
ускорять робота на прямых участках (U2=1.2)
замедлять на сложных участках (U2=0.7)
Б) Добавьте еще одну ступень, которая будет ставить
нормальную скорость (U2=1) на средней ступени
регулирования.
27
28.
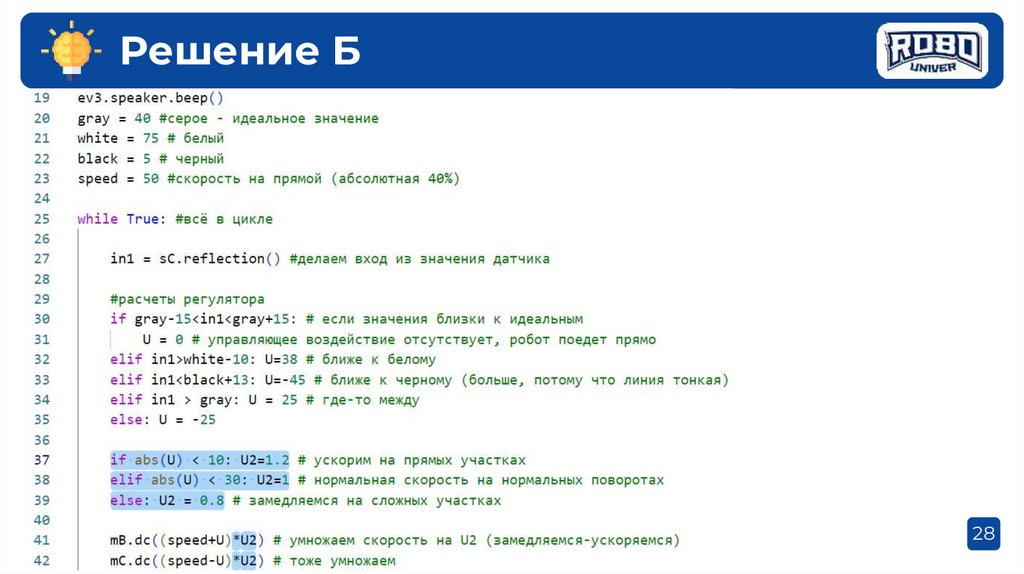
Решение Б28
29.
2930.
Свободное время30
31.
Время фото31
32.
Проверяем явки32