






















. Эта связь соединяет два тела так, что одно может вращаться относительно другого вокруг оси,")



 physics
physicsSimilar presentations:




")



")

Основные понятия и аксиомы статики
1.
Дисциплина: Техническая механикаТема: Основные понятия и аксиомы
статики
2.
Техническая механикаТеоретическая
механика
статика
кинематика
Сопротивление
материалов
динамика
Детали
машин
3. Техническая механика -это наука об общих законах механического движения и применении их в современной технике. Теоретическая
механикаэто наука о механическомдвижении материальных твердых
тел и их взаимодействии.
4. Статика- изучает различные системы сил, действующих на тела, способы преобразования одних систем сил в другие, условия
Статикаизучает различные системы сил,действующих на тела, способы
преобразования одних систем
сил в другие, условия
равновесия тел, на которые
действуют силы.
5. Кинематика- изучает движение тел независимо от тех причин, которые вызывают это движение
Кинематикаизучает движение телнезависимо от тех
причин, которые
вызывают это движение
6. Динамика- изучает законы движения материальных тел под действием сил.
Динамикаизучает законы движенияматериальных тел под
действием сил.
7.
Материальная точкаматериальное тело, размерами которогопри изучении его движения
пренебрегают.
Абсолютно твердое телотело, в котором расстояние между двумя
любыми точками остается постоянным
при любых воздействиях со стороны
других тел.
Сила- мера механического
взаимодействия тел. Характеризуется
точкой приложения, численным
значением и направлением.
8.
Система сил- это две или несколькосил, действующих на тело одновременно.
Эквивалентные С.С.- это С.С.,
которые можно заменить друг другом не
изменяя механического состояния тела.
Равнодействующая сила- это сила,
заменяющая совокупное действие системы
сил.
Уравновешивающая сила- это сила,
численно равная равнодействующей, но
направленная по той же прямой в
противоположную сторону.
9.
Аксиомы статики10.
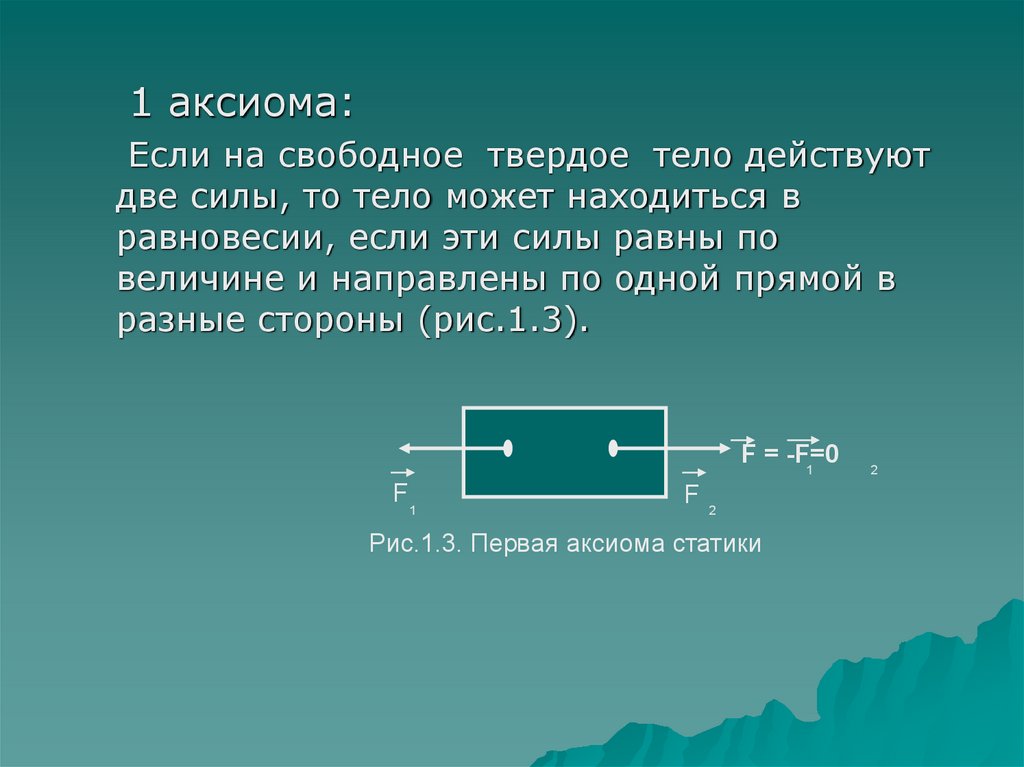
1 аксиома:Если на свободное твердое тело действуют
две силы, то тело может находиться в
равновесии, если эти силы равны по
величине и направлены по одной прямой в
разные стороны (рис.1.3).
F = -F=0
1
F
1
F2
Рис.1.3. Первая аксиома статики
2
11. 2 аксиома: Действие данной системы сил не изменится, если к ней добавить или от нее отнять уравновешенную систему сил.
АВ
F
F2
F
=
F1
F =
2
F
1
12.
13.
3. Аксиома параллелограмма.Две силы, приложенные в одной точке, имеют равнодействующую,
приложенную в той же точке, построенного на этих силах, как на
сторонах.
F
1
А
F
R
2
Аксиома параллелограмма
•Вектор R называется геометрической суммой этих сил.
Модуль его можно найти, применяя теорему косинусов
R F12 F22 2 F1 F2 cos .
14. Следствие из второй и третьей аксиом: силу, действующую на твердое тело, можно перемещать вдоль линии ее действия.
15. 4 аксиома: при всяком действии одного тела на поверхность другого существует такое же по величине, но противоположное по
направлению противодействие16. Силы действующие и противодействующие всегда приложены к разным телам, поэтому они не уравновешиваются. Силы, с которыми два
теладействуют друг на друга, всегда
равны по модулю, направлены
вдоль одной прямой в
противоположные стороны.
17. 5 аксиома: всякое несвободное тело можно считать свободным, если механическое действие связи заменить реакцией связи
18. Связи и их реакции
19. Свободные тела- тела, перемещение которых не ограничено. Связанные тела- тела, перемещение которых ограничено другими телами.
Связи- тела, ограничивающиеперемещение других тел.
20. Реакции связей- силы, действующие от связей и препятствующие перемещению. Реакция связи всегда направлена с той стороны, куда
нельзяперемещаться.
Всякое связанное тело можно
представить свободным, если связи
заменить их реакциями.
21. Связь- гладкая опора Реакция опоры приложена в точке опоры и всегда направлена перпендикулярно опоре.
22. Гибкая связь. Груз подвешен на двух нитях. Реакция нити направлена вдоль нити от тела, при этом нить может быть только
растянута.23. Жесткий стержень.
Стержень может бытьсжат или растянут.
Реакция стержня
направлена вдоль
стержня
Точное направление
реакции определяют,
мысленно убрав
стержень и рассмотрев
возможные
перемещения тела без
24. Шарнирная опора. Шарнир допускает поворот вокруг точки зацепления. Различают два вида: подвижный и неподвижный.
25. Подвижный шарнир
Стержень, закрепленный на шарнире,может поворачиваться вокруг шарнира,
а точка крепления может перемещаться
вдоль направляющей.
26. Неподвижный шарнир.
Точка крепления перемещаться неможет. Стержень может свободно
поворачиваться вокруг оси шарнира.
27. Защемление или заделка
Любые перемещения точкикрепления невозможны.
28. Цилиндрический шарнир (подшипник). Эта связь соединяет два тела так, что одно может вращаться относительно другого вокруг оси,
Цилиндрический шарнир (подшипник). Эта связь соединяет два тела так, что одноможет вращаться относительно другого вокруг оси, называемой осью шарнира. Считается,
что реакция R⃗ шарнира лежит в плоскости, перпендикулярной его оси; но заранее
определить направление реакции в этой плоскости, как правило, нельзя. Дело в том, что
подобное закрепление тела не позволяет ему двигаться в любом направлении,
перпендикулярном указанной оси.
29. Сферический шарнир соединяет тела так, что они могут вращаться друг относительно друга вокруг одной точки – центра шарнира
Сферический шарнир соединяет тела так, чтоони могут вращаться друг относительно друга
вокруг одной точки – центра шарнира
30. Частным случаем сферического шарнира является подпятник – подшипник с упором. Его схематичное изображение представлено на
рисунке.Реакция подпятника также имеет произвольное направление в
пространстве.
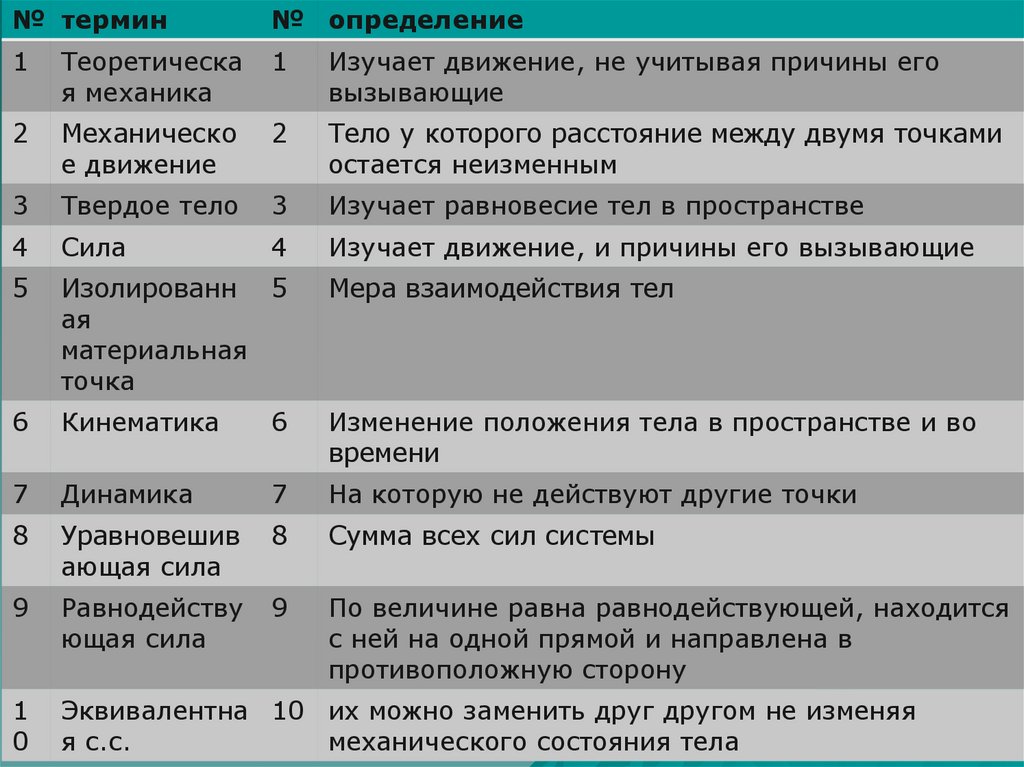
31. опрос
Сопоставление термина с определениями32.
№ термин№ определение
1
Теоретическа
я механика
1
Изучает движение, не учитывая причины его
вызывающие
2
Механическо
е движение
2
Тело у которого расстояние между двумя точками
остается неизменным
3
Твердое тело
3
Изучает равновесие тел в пространстве
4
Сила
4
Изучает движение, и причины его вызывающие
5
Изолированн 5
ая
материальная
точка
Мера взаимодействия тел
6
Кинематика
6
Изменение положения тела в пространстве и во
времени
7
Динамика
7
На которую не действуют другие точки
8
Уравновешив
ающая сила
8
Сумма всех сил системы
9
Равнодейству
ющая сила
9
По величине равна равнодействующей, находится
с ней на одной прямой и направлена в
противоположную сторону
1
0
Эквивалентна 10 их можно заменить друг другом не изменяя
я с.с.
механического состояния тела