

 software
softwareSimilar presentations:
")




")




Вводная информация. LabView. Лекция 1
1.
Лекция 1Вводная информация
2.
LabView – кросплатформенная графическая среда разработки фирмыNational Instruments. LabView широко используется в системах сбора
данных, а так же для управления техническими объектами и
технологическими процессами.
«заточенность» среды для разработки под «железо»
Модуль LabVIEW Robotics предоставляет инструменты
разработки аппаратного и программного обеспечения для
проектирования роботизированной системы управления.
3.
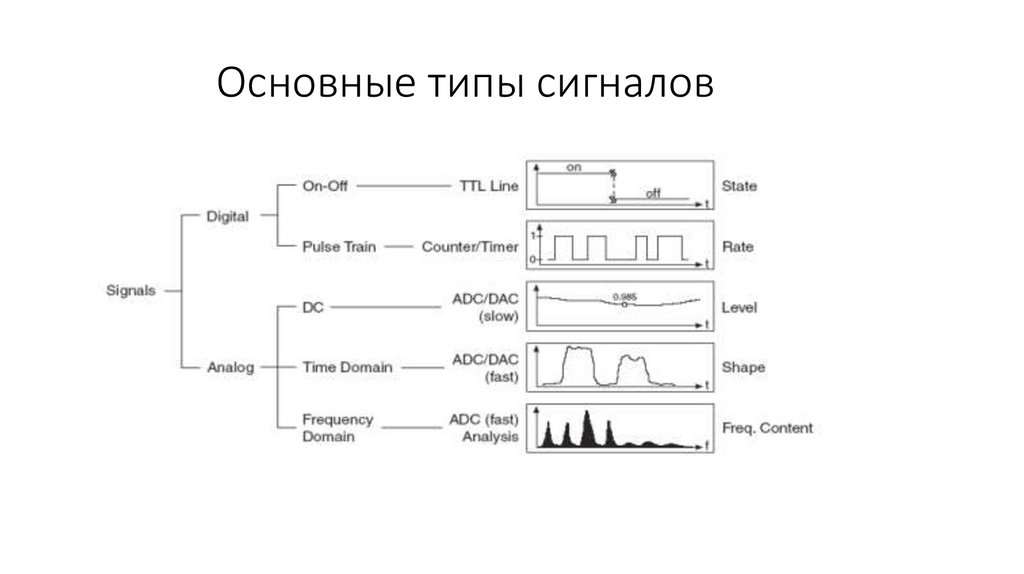
Основные типы сигналов4.
5.
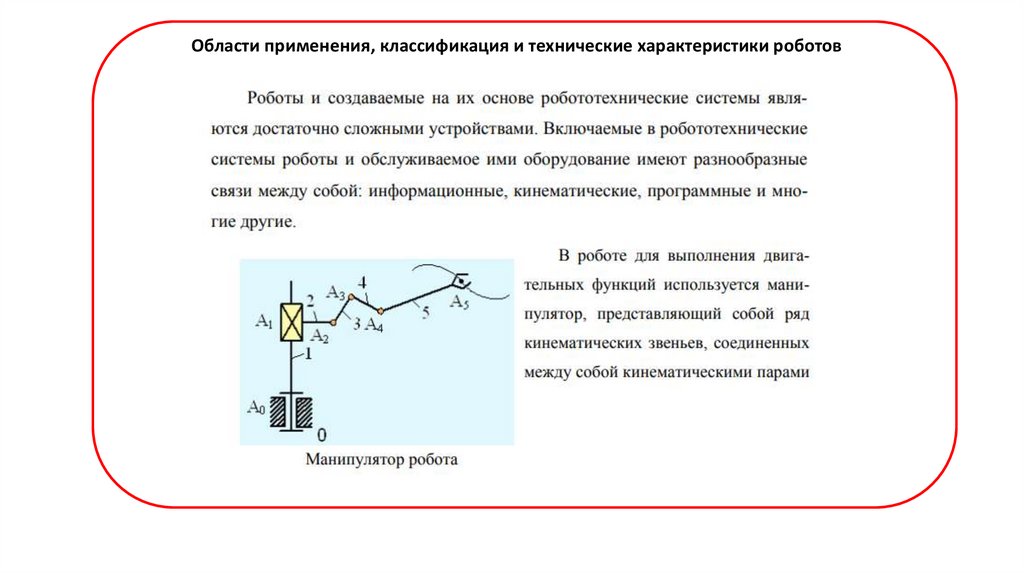
Области применения, классификация и технические характеристики роботов6.
Области применения роботов7.
8.
9.
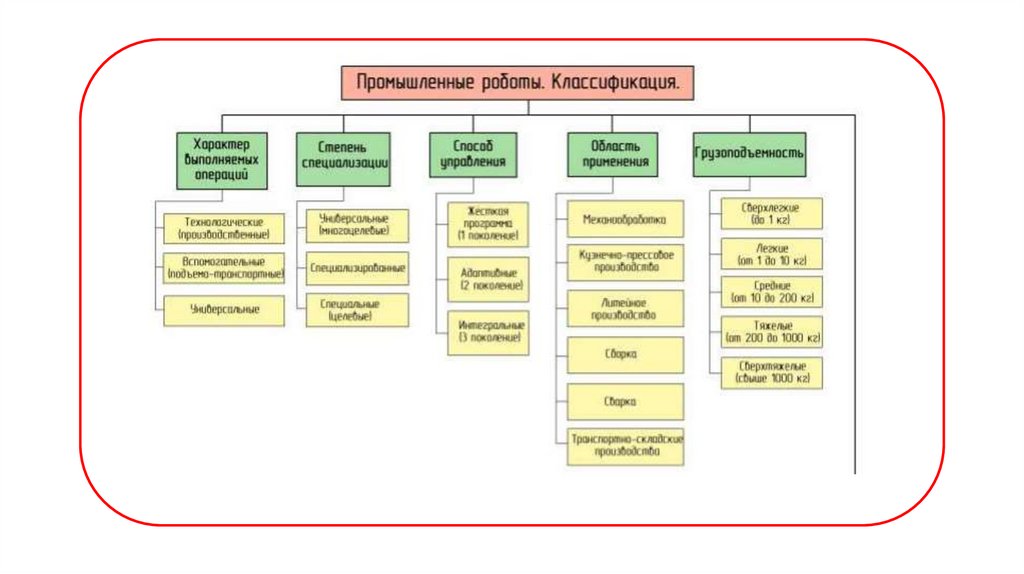
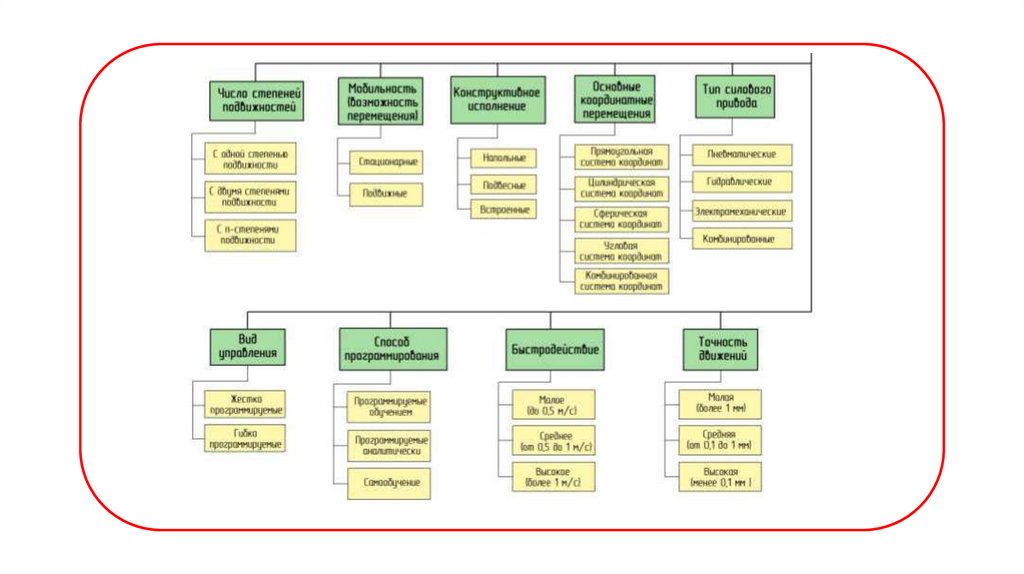
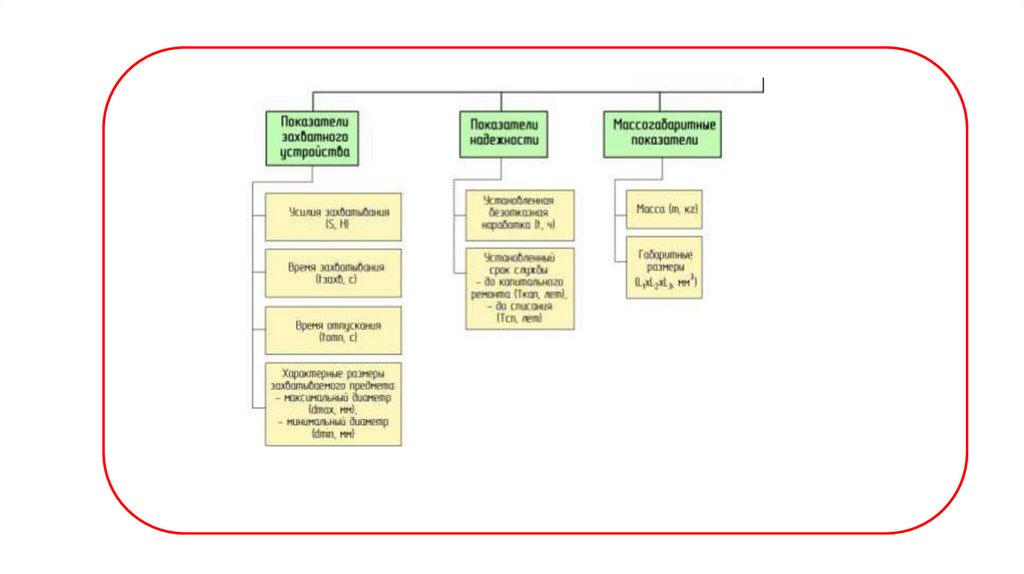
Технические характеристики промышленных роботов10.
11.
Структурная и кинематическая классификацииМанипуляционных устройств робототехнических
систем
12.
13.
14.
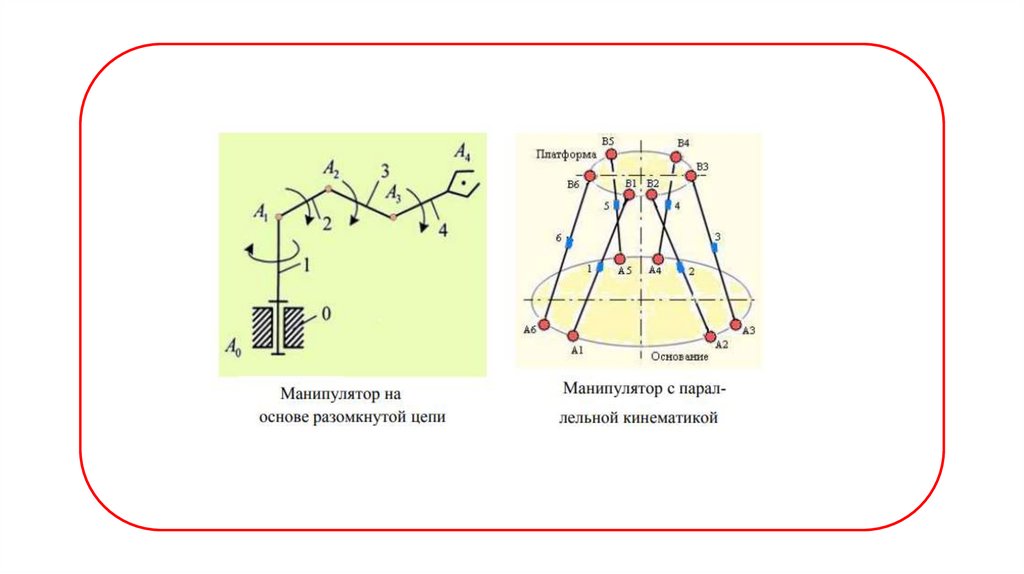
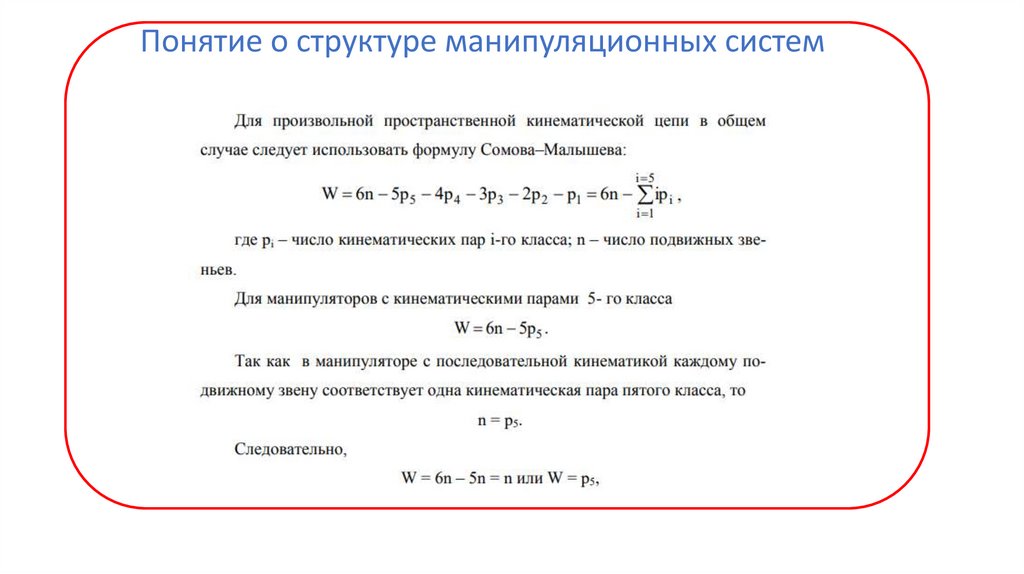
Понятие о структуре манипуляционных систем15.
16.
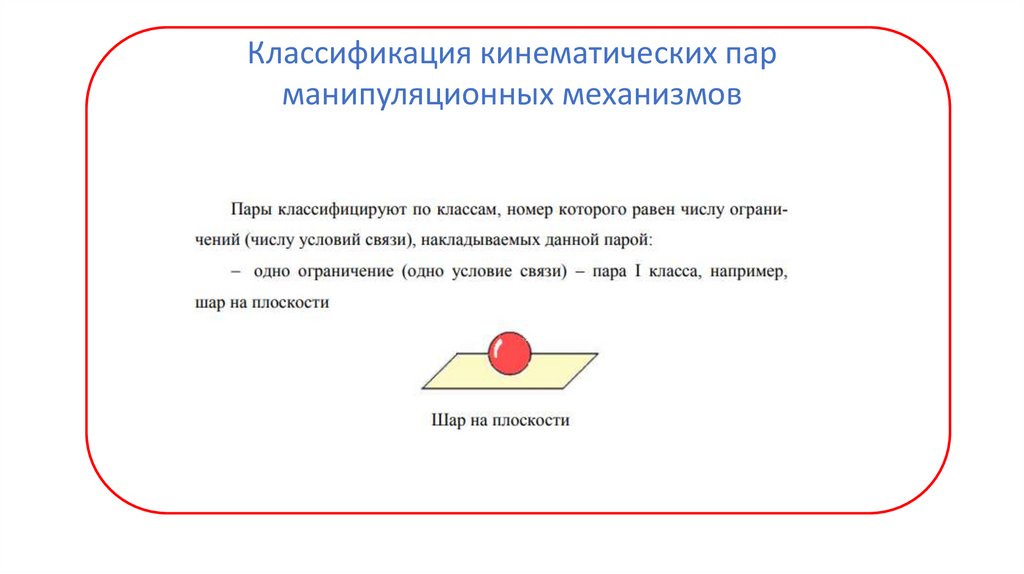
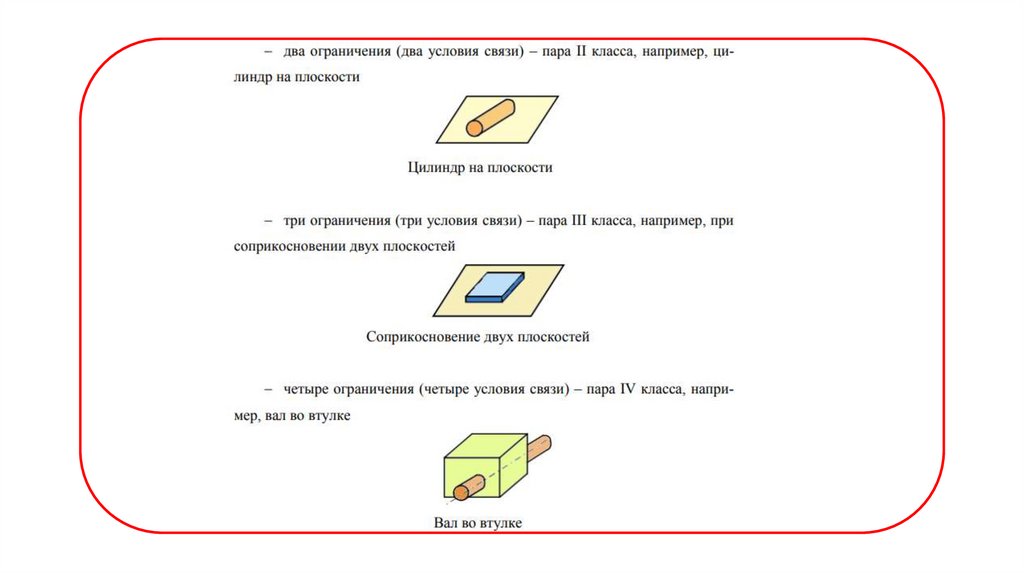
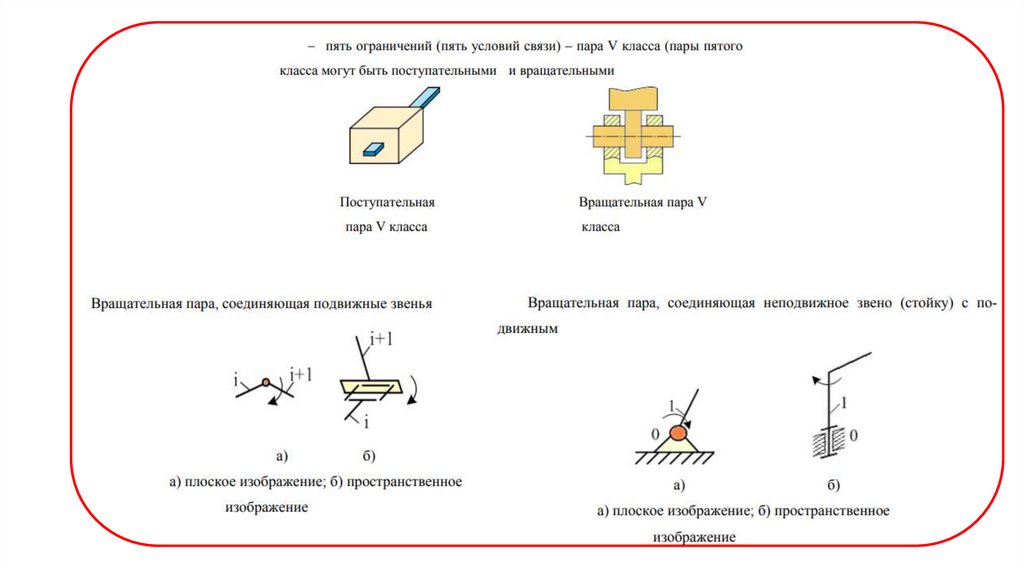
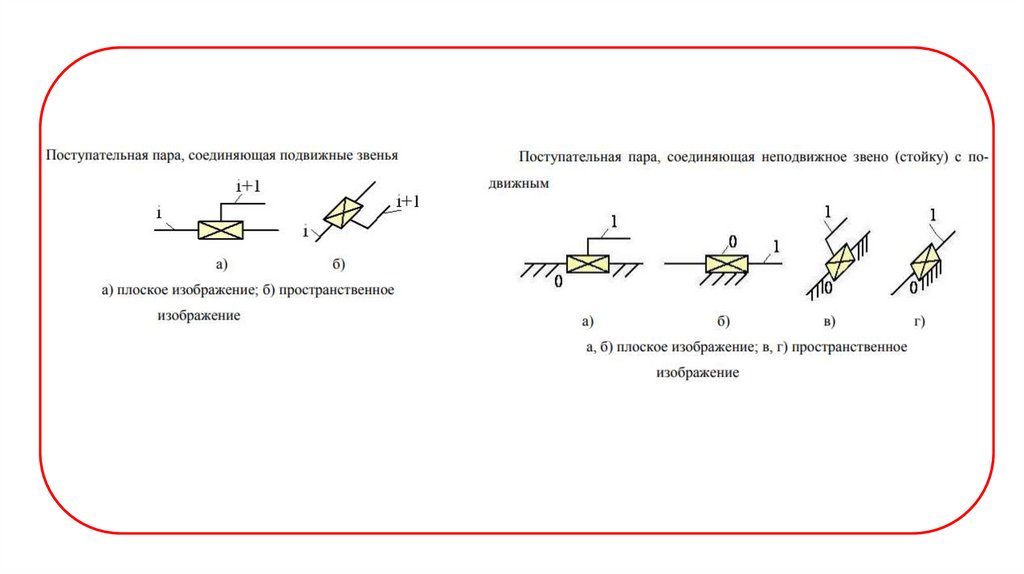
Классификация кинематических парманипуляционных механизмов
17.
18.
19.
20.
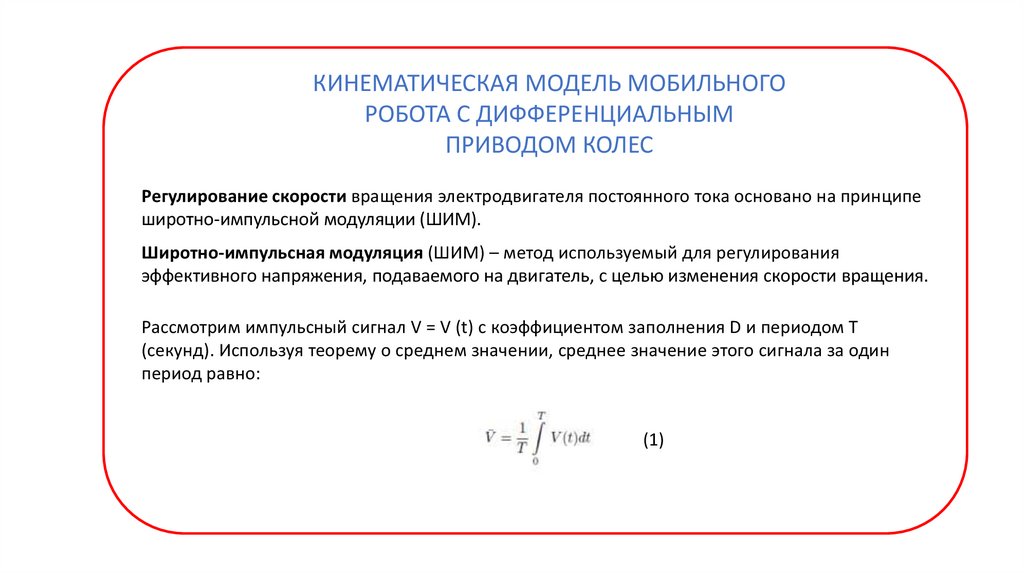
КИНЕМАТИЧЕСКАЯ МОДЕЛЬ МОБИЛЬНОГОРОБОТА С ДИФФЕРЕНЦИАЛЬНЫМ
ПРИВОДОМ КОЛЕС
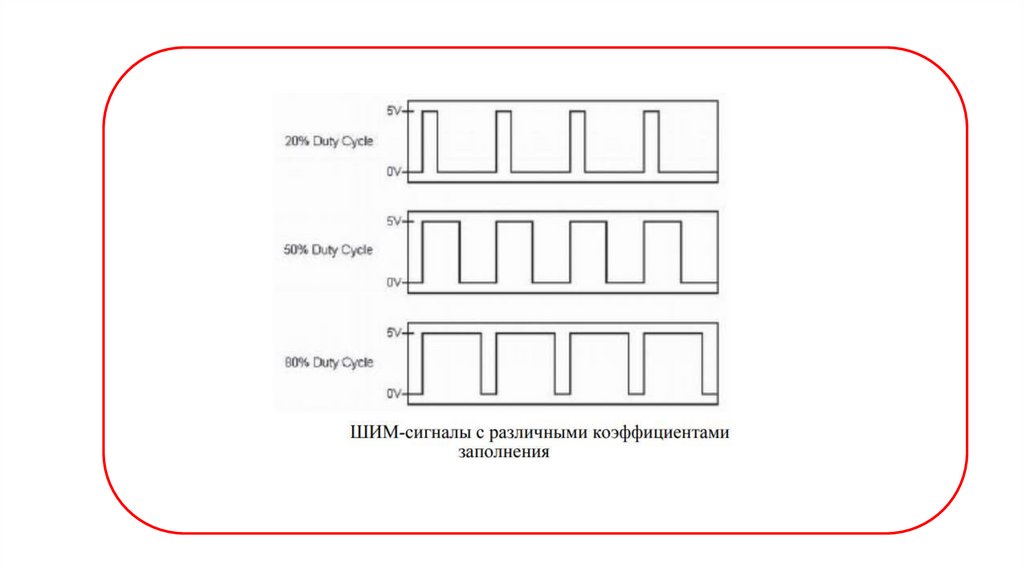
Регулирование скорости вращения электродвигателя постоянного тока основано на принципе
широтно-импульсной модуляции (ШИМ).
Широтно-импульсная модуляция (ШИМ) – метод используемый для регулирования
эффективного напряжения, подаваемого на двигатель, с целью изменения скорости вращения.
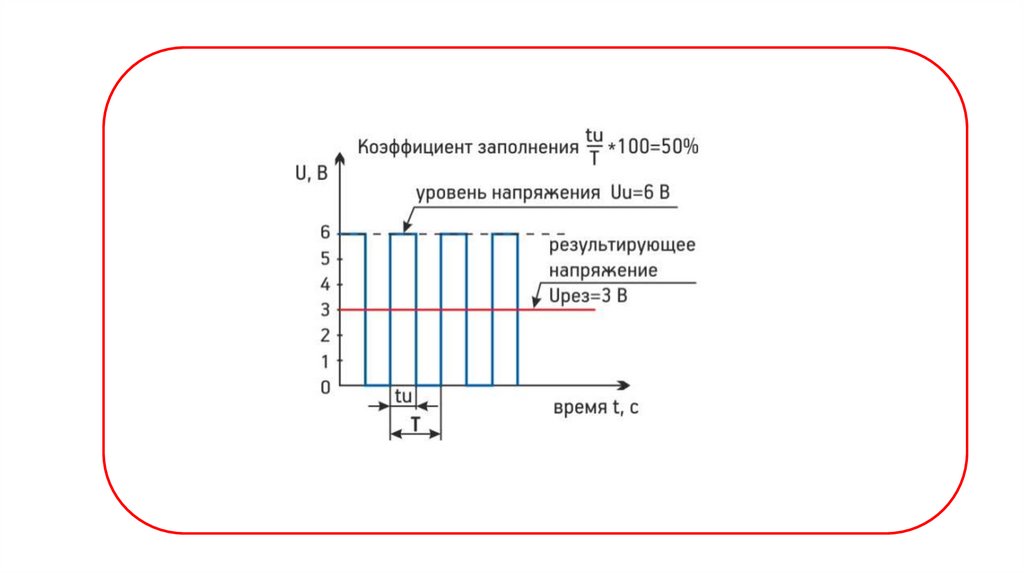
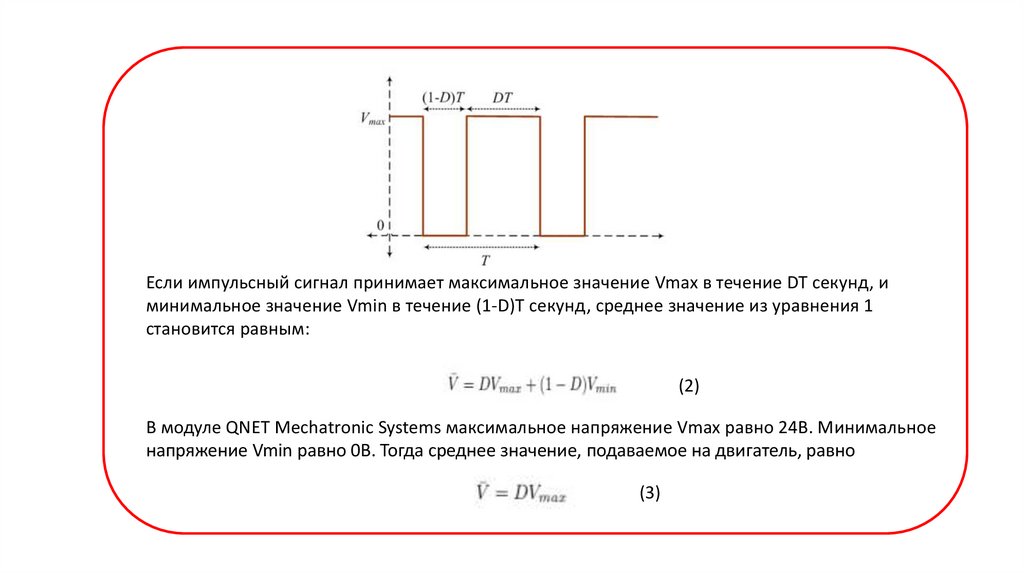
Рассмотрим импульсный сигнал V = V (t) с коэффициентом заполнения D и периодом T
(секунд). Используя теорему о среднем значении, среднее значение этого сигнала за один
период равно:
(1)
21.
22.
Если импульсный сигнал принимает максимальное значение Vmax в течение DT секунд, иминимальное значение Vmin в течение (1-D)T секунд, среднее значение из уравнения 1
становится равным:
(2)
В модуле QNET Mechatronic Systems максимальное напряжение Vmax равно 24В. Минимальное
напряжение Vmin равно 0В. Тогда среднее значение, подаваемое на двигатель, равно
(3)
23.
24.
25.
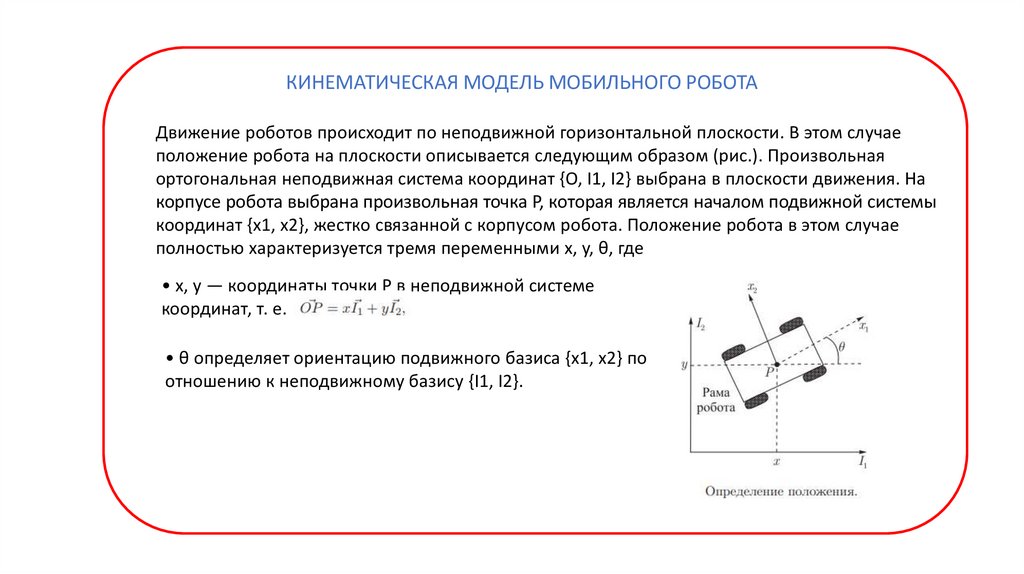
КИНЕМАТИЧЕСКАЯ МОДЕЛЬ МОБИЛЬНОГО РОБОТАДвижение роботов происходит по неподвижной горизонтальной плоскости. В этом случае
положение робота на плоскости описывается следующим образом (рис.). Произвольная
ортогональная неподвижная система координат {O, I1, I2} выбрана в плоскости движения. На
корпусе робота выбрана произвольная точка P, которая является началом подвижной системы
координат {x1, x2}, жестко связанной с корпусом робота. Положение робота в этом случае
полностью характеризуется тремя переменными x, y, θ, где
• x, y — координаты точки P в неподвижной системе
координат, т. е.
• θ определяет ориентацию подвижного базиса {x1, x2} по
отношению к неподвижному базису {I1, I2}.
26.
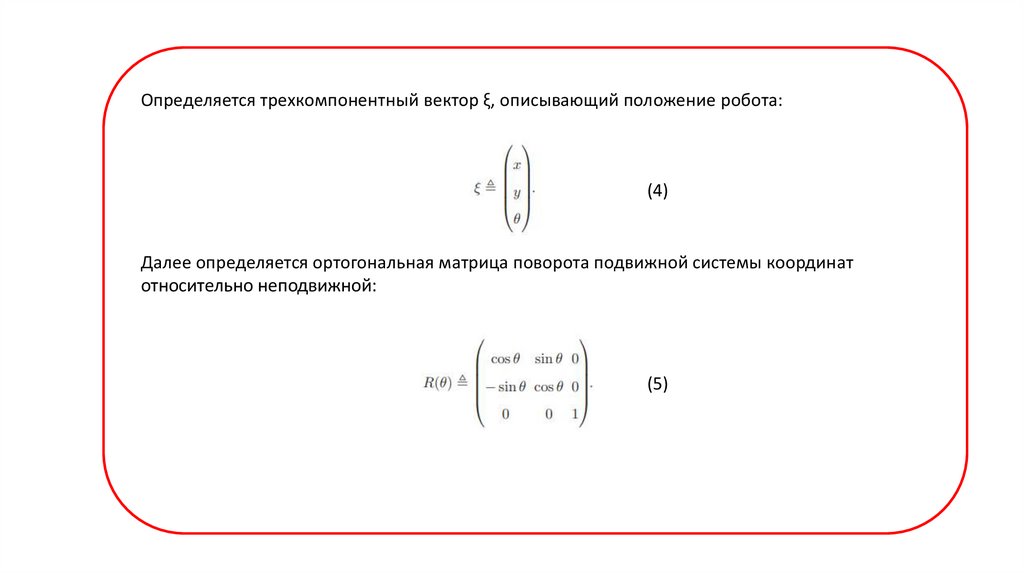
Определяется трехкомпонентный вектор ξ, описывающий положение робота:(4)
Далее определяется ортогональная матрица поворота подвижной системы координат
относительно неподвижной:
(5)
27.
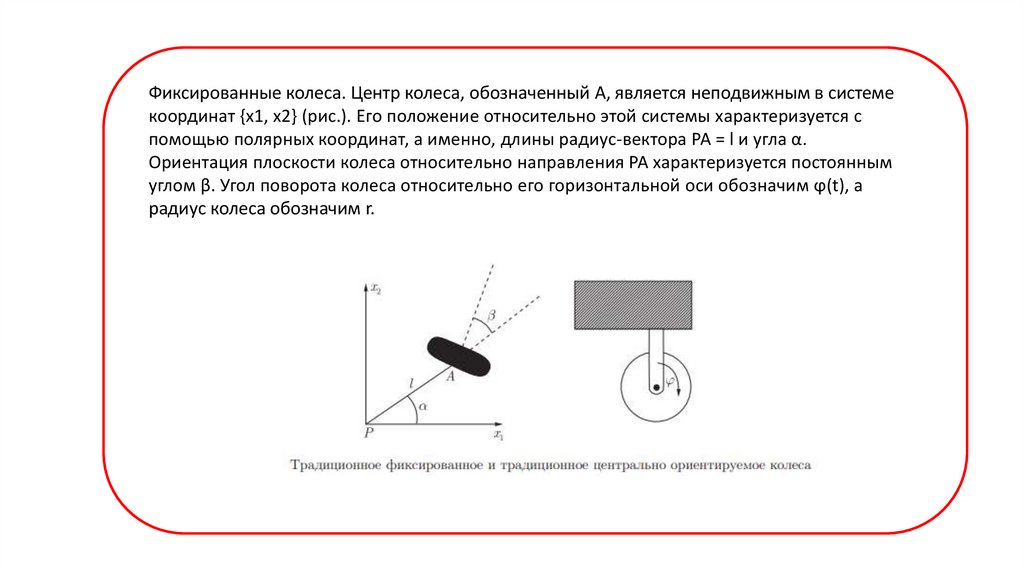
Фиксированные колеса. Центр колеса, обозначенный A, является неподвижным в системекоординат {x1, x2} (рис.). Его положение относительно этой системы характеризуется с
помощью полярных координат, а именно, длины радиус-вектора PA = l и угла α.
Ориентация плоскости колеса относительно направления PA характеризуется постоянным
углом β. Угол поворота колеса относительно его горизонтальной оси обозначим ϕ(t), а
радиус колеса обозначим r.
28.
ДАТЧИК УГЛА ПОВОРОТА (ЭНКОДЕР)Датчики угла поворота – это устройства, предназначенные для преобразования угла
поворота вращающегося объекта (вала) в электрические сигналы, позволяющие
определить угол его поворота.
Они широко применяются в промышленности (в частности в сервоприводах), в
роботостроении, в автомобилестроении (например, для определения угла поворота
рулевого колеса), в компьютерной технике (для определения угла поворота колеса
компьютерной мыши) и т.п.
Датчики подразделяются: по способу выдачи информации на накапливающие
(инкрементные) и абсолютные (позиционные); по принципу действия на оптические,
резистивные, магнитные, индуктивные, механические.
29.
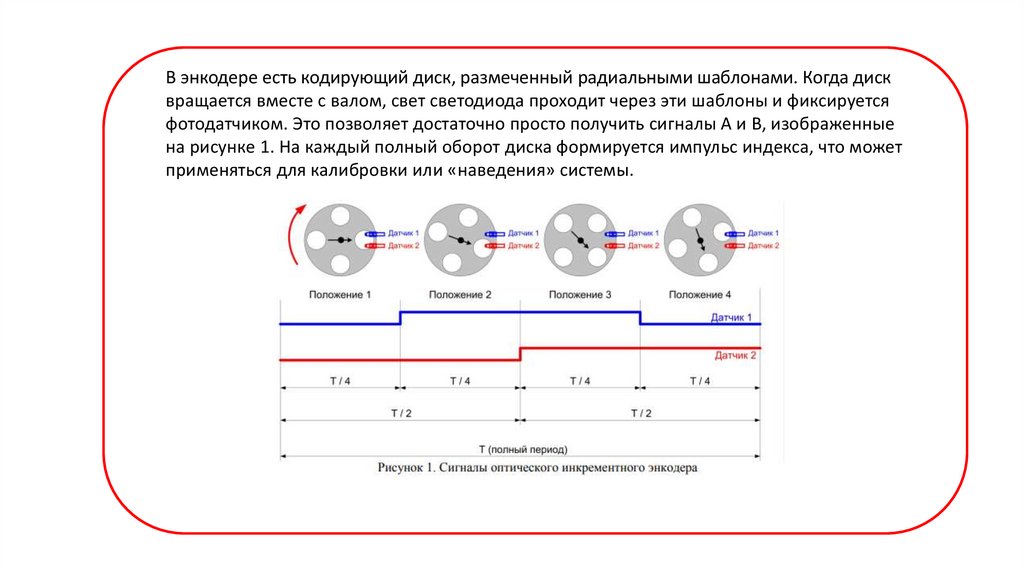
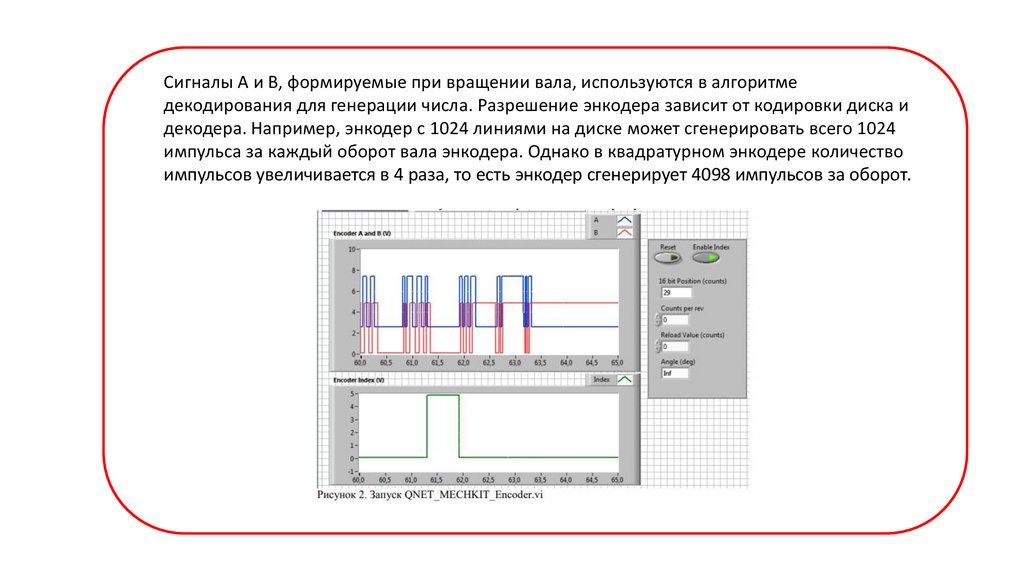
В энкодере есть кодирующий диск, размеченный радиальными шаблонами. Когда дисквращается вместе с валом, свет светодиода проходит через эти шаблоны и фиксируется
фотодатчиком. Это позволяет достаточно просто получить сигналы A и B, изображенные
на рисунке 1. На каждый полный оборот диска формируется импульс индекса, что может
применяться для калибровки или «наведения» системы.
30.
Сигналы A и B, формируемые при вращении вала, используются в алгоритмедекодирования для генерации числа. Разрешение энкодера зависит от кодировки диска и
декодера. Например, энкодер с 1024 линиями на диске может сгенерировать всего 1024
импульса за каждый оборот вала энкодера. Однако в квадратурном энкодере количество
импульсов увеличивается в 4 раза, то есть энкодер сгенерирует 4098 импульсов за оборот.
31.
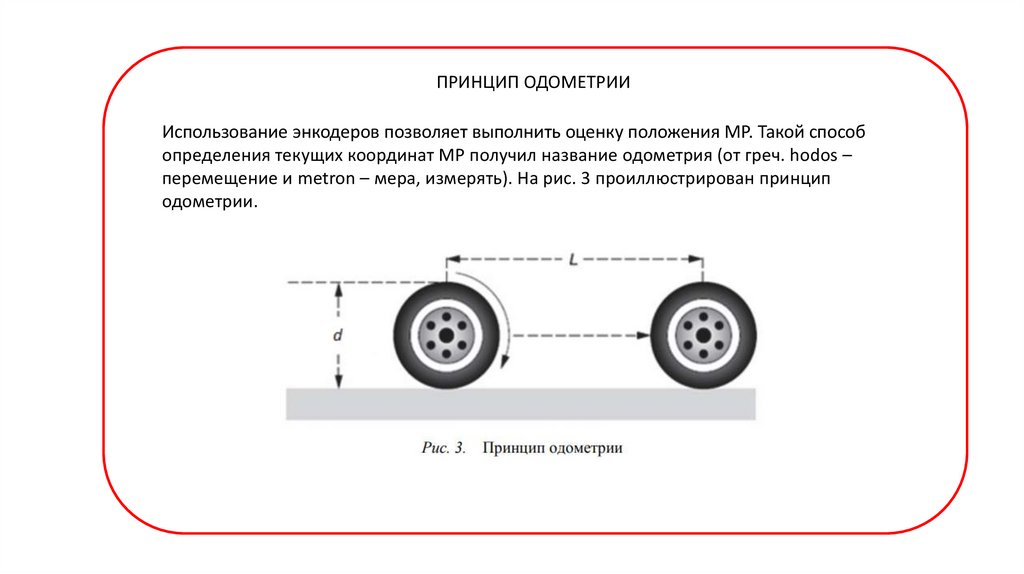
ПРИНЦИП ОДОМЕТРИИИспользование энкодеров позволяет выполнить оценку положения МР. Такой способ
определения текущих координат МР получил название одометрия (от греч. hodos –
перемещение и metron – мера, измерять). На рис. 3 проиллюстрирован принцип
одометрии.
32.
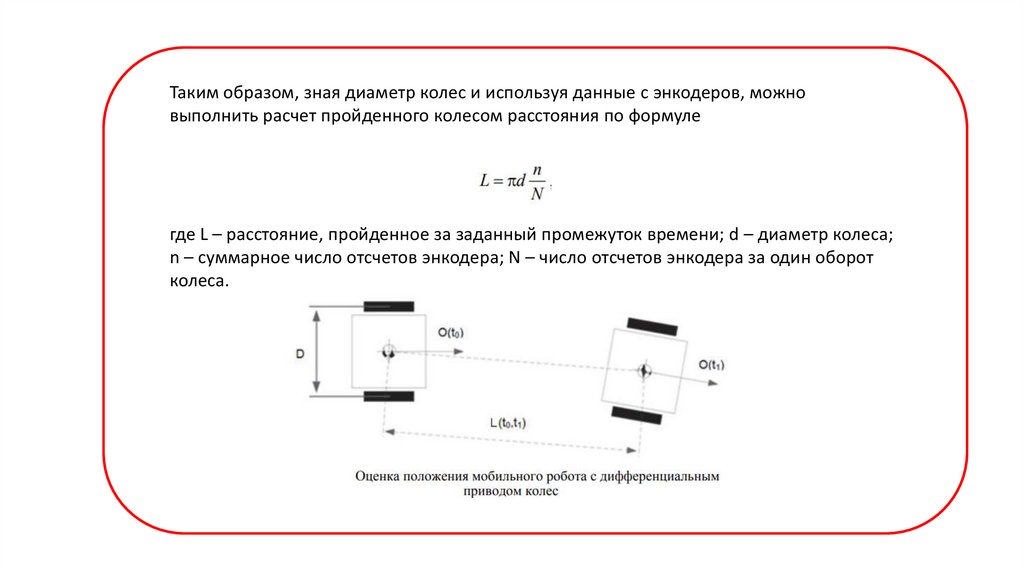
Таким образом, зная диаметр колес и используя данные с энкодеров, можновыполнить расчет пройденного колесом расстояния по формуле
где L – расстояние, пройденное за заданный промежуток времени; d – диаметр колеса;
n – суммарное число отсчетов энкодера; N – число отсчетов энкодера за один оборот
колеса.
33.
Создание стартовой модели управлениямобильным роботом
Базовая структура управления стартовым комплектом по
существу состоит всего из 3 элементов.
Блок «Инициализировать Starter Kit 2.0», цикл while и блок
«Закрыть Starter Kit».
цикл while должен прерываться при возникновении
ошибки
34.
• Инициализация инициирует сеанс взаимодействия ссимуляционной моделью робота.
• ID указывает идентификатор, назначенный моделируемому
роботу в текущем сеансе моделирования
• Кластеры ошибок Error In/Error Out
• Error in описание ошибок, которые возникают до запуска этого
узла
• Error out содержит информацию об ошибке в выходном кластере
35.
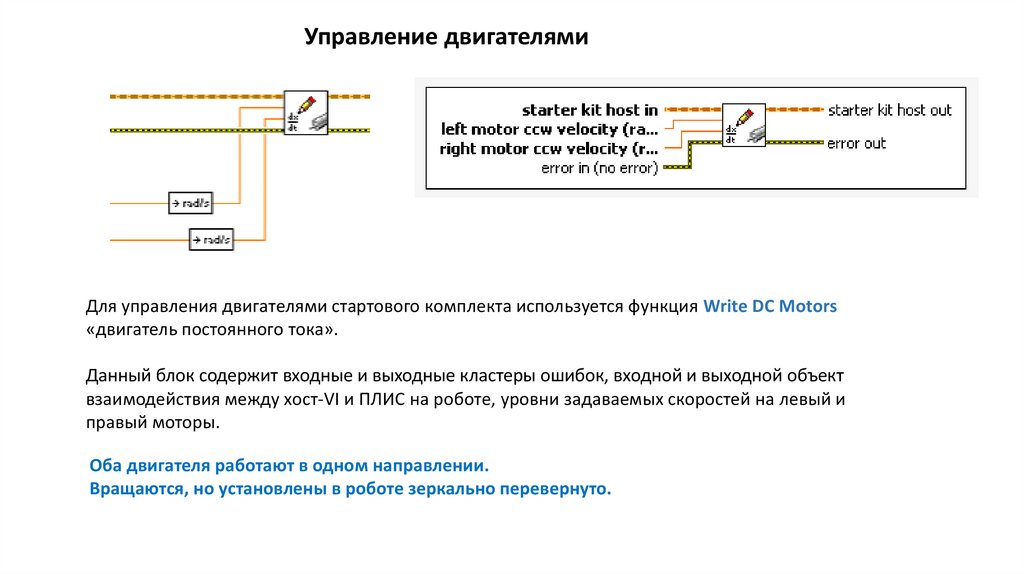
Управление двигателямиДля управления двигателями стартового комплекта используется функция Write DC Motors
«двигатель постоянного тока».
Данный блок содержит входные и выходные кластеры ошибок, входной и выходной объект
взаимодействия между хост-VI и ПЛИС на роботе, уровни задаваемых скоростей на левый и
правый моторы.
Оба двигателя работают в одном направлении.
Вращаются, но установлены в роботе зеркально перевернуто.
36.
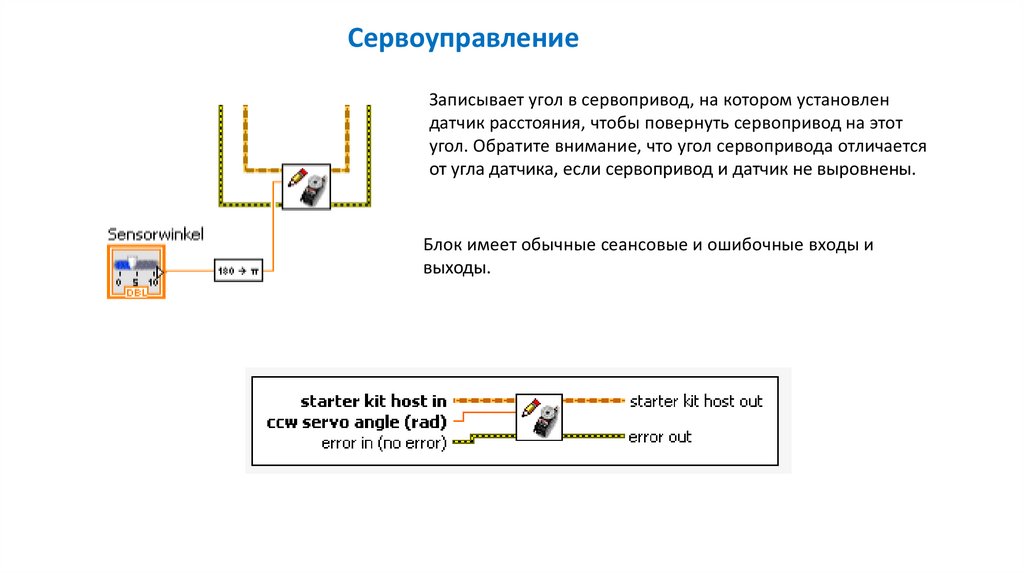
СервоуправлениеЗаписывает угол в сервопривод, на котором установлен
датчик расстояния, чтобы повернуть сервопривод на этот
угол. Обратите внимание, что угол сервопривода отличается
от угла датчика, если сервопривод и датчик не выровнены.
Блок имеет обычные сеансовые и ошибочные входы и
выходы.