
 software
software electronics
electronicsSimilar presentations:








")

Создание мультифункционального квадрокоптера
1.
Департамент образованиягорода Москвы
Центр технологической поддержки образования
МОСКОВСКИЙ АВТОМОБИЛЬНО-ДОРОЖНЫЙ ГОСУДАРСТВЕННЫЙ
ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ (МАДИ)
Создание мультифункционального квадрокоптера
Автор: Воробьев Глеб Максимович
Образовательное учреждение: ГБОУ Школа №1223
Класс: 10 А
Научные руководители:
инженер МАДИ - Логинов Андрей Владимирович;
Педагог дополнительного образования ГБПОУ «Воробьевы горы» Волощук Константин Семенович
г. Москва
2023г.
2.
Актуальность проектаНа текущий момент, беспилотные летательные аппараты (БПЛА) применяются
для различного рода задач и могут выполнять большой спектр функций.
Использование БПЛА, как правило, применяется для выполнения определенной
конкретной задачи (1:1). Применение беспилотных летательных аппаратов со
сменными модулями, является актуальной темой в индустрии беспилотных
технологий (1:N).
Основные сферы применения беспилотных летательных аппаратов: сельское
хозяйство, строительство, горнодобывающая промышленность и инспекция
инфраструктуры, а так же интеграция технологий тепловизионного изображения и
сканирования штрих-кодов, которые могут повысить качество менеджмента
инфраструктуры и эффективность в управлении, контроле качества и инспекционных
задачах.
Учитывая актуальность запросов со стороны потенциальных потребителей услуг,
предлагается оснащение БПЛА различными сменными модулями: тепловизионной
камерой для обнаружения повреждений на высоковольтных ЛЭП, сканером штрихкодов для крупных распределительных центров и складов, измерительное
оборудование типа «лазерный дальномер», комплекс датчиков по измерению
метеорологических условий местности.
3.
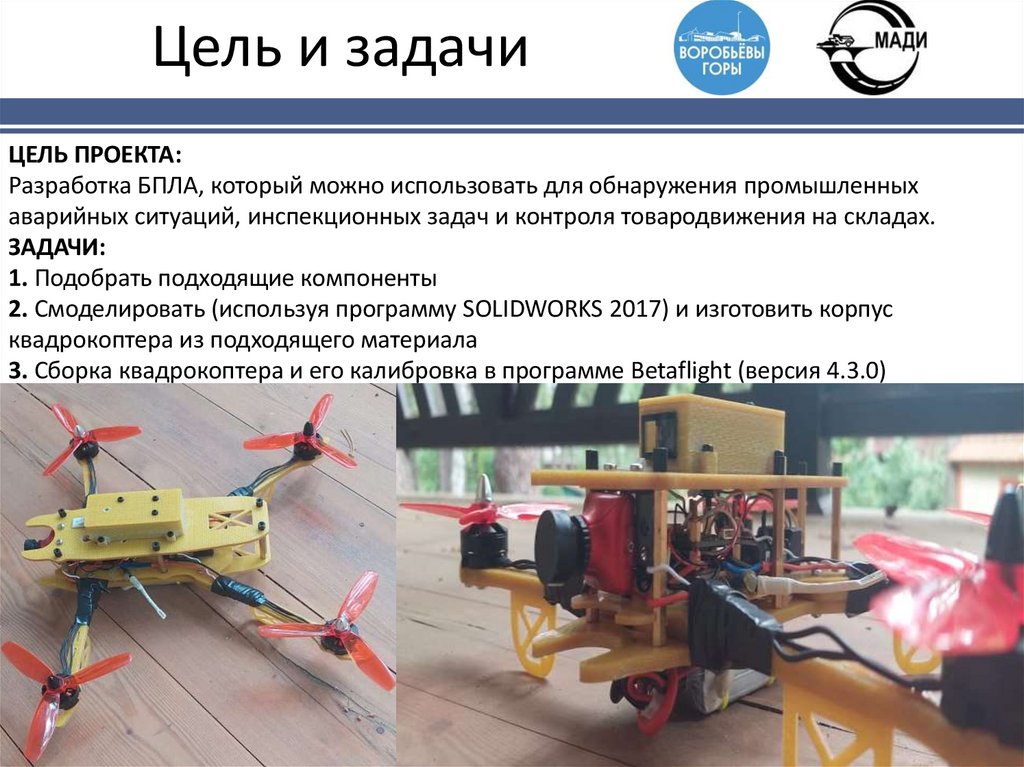
Цель и задачиЦЕЛЬ ПРОЕКТА:
Разработка БПЛА, который можно использовать для обнаружения промышленных
аварийных ситуаций, инспекционных задач и контроля товародвижения на складах.
ЗАДАЧИ:
1. Подобрать подходящие компоненты
2. Смоделировать (используя программу SOLIDWORKS 2017) и изготовить корпус
квадрокоптера из подходящего материала
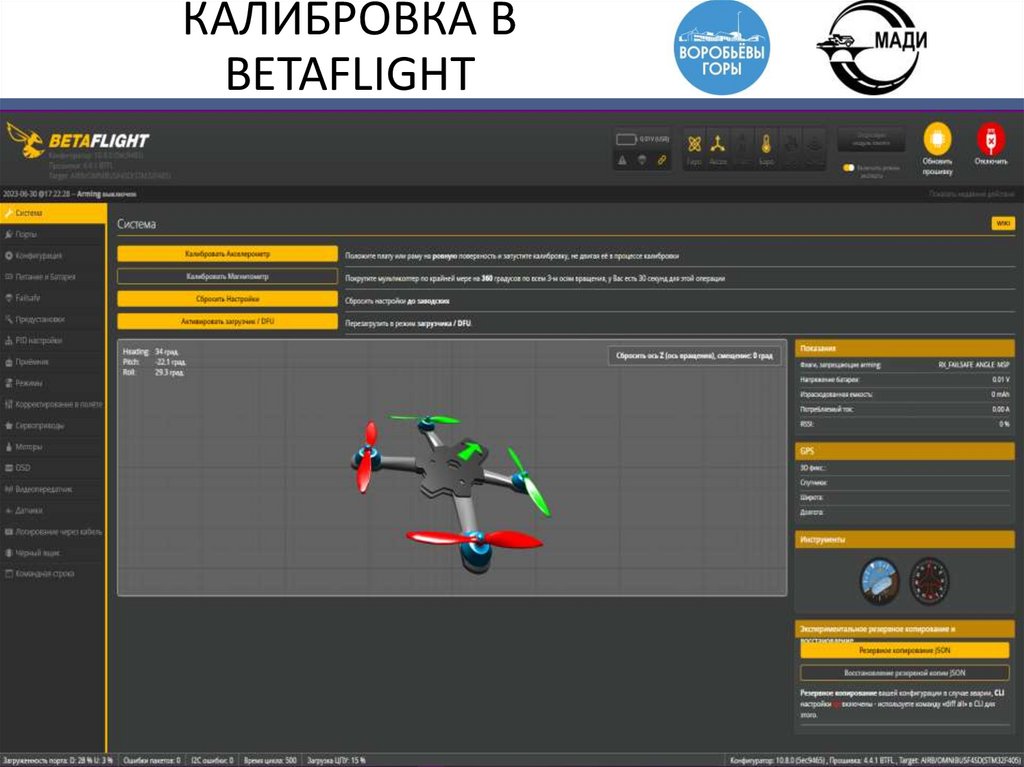
3. Сборка квадрокоптера и его калибровка в программе Betaflight (версия 4.3.0)
4.
Техническиехарактеристики
По выполненным расчетам, готовый БПЛА должен обладать следующими
характеристиками:
-
Масса = 0.5-0.8 кг
Скорость = 15-25 м\с
Подъемная сила =
Автономность =
…..
….
….
5.
Краткое описаниеКРАТКОЕ СОДЕРЖАНИЕ РАБОТЫ
1. Определены требования и спецификации к проекту, включая задачи,
которые необходимо выполнить, и желаемые возможности квадрокоптера.
2. Использовано программное обеспечение 3D CAD, такое как SOLIDWORKS,
для проектирования физической модели квадрокоптера и модулей.
(Спроектировано расположение электроники, электропроводки и
двигателей. Предусмотрены точки крепления для тепловизионной камеры и
модуля сканера штрих-кодов.)
3. Создана 3D модель квадрокоптера с помощью 3D-печати, чтобы убедиться,
что дизайн соответствует рассчитанным характеристикам.
4. Внедрена электроника и программирование для управления
квадрокоптером и модулями. Интегрировано программное и аппаратное
обеспечение таким образом, чтобы модули можно было легко заменять и
использовать. Оптимизирована производительность квадрокоптера и
модулей в соответствии с поставленными задачами к эффективности и
точности.
5. Валидация
6.
Процесс созданиямодели квадрокоптера
7.
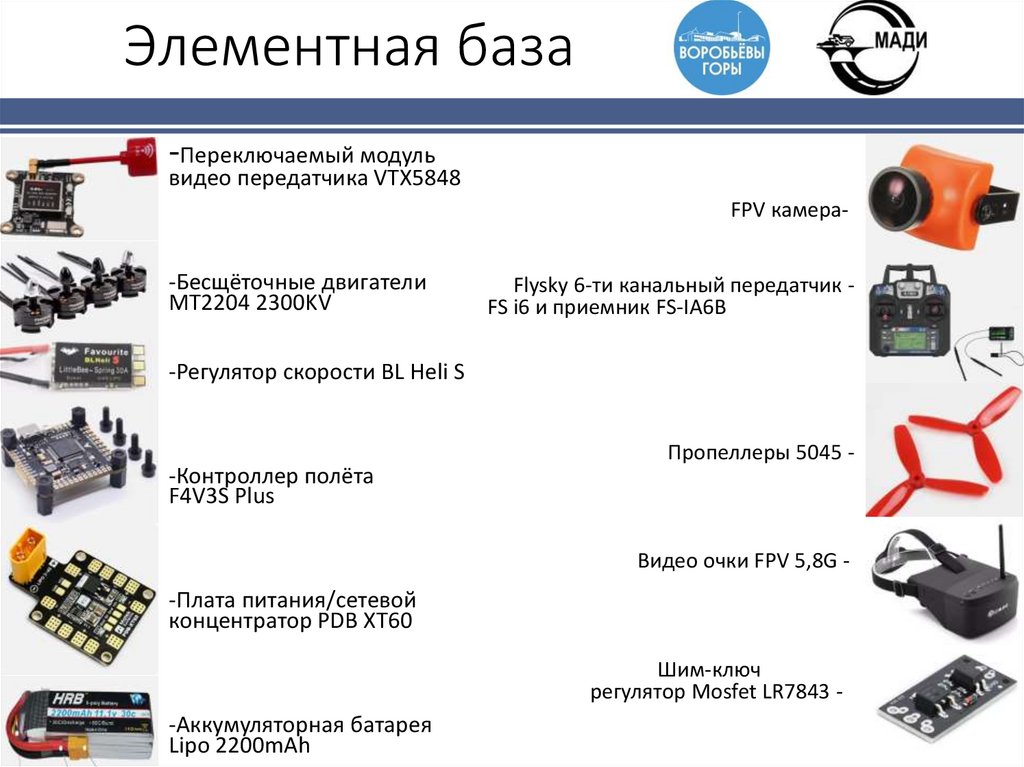
Элементная база-Переключаемый модуль
видео передатчика VTX5848
FPV камера-
-Бесщёточные двигатели
МТ2204 2300KV
Flysky 6-ти канальный передатчик FS i6 и приемник FS-IA6B
-Регулятор скорости BL Heli S
Пропеллеры 5045 -
-Контроллер полёта
F4V3S Plus
Видео очки FPV 5,8G -
-Плата питания/сетевой
концентратор PDB XT60
Шим-ключ
регулятор Mosfet LR7843 -
-Аккумуляторная батарея
Lipo 2200mAh
8.
ОСНОВНЫЕ РЕЗУЛЬТАТЫОСНОВНЫЕ РЕЗУЛЬТАТЫ И ЛИЧНЫЙ ВКЛАД АВТОРА
ПРОЕКТА
1. Подобраны подходящие компоненты,
удовлетворяющие расчетным техническим
характеристикам.
2. Смоделирован (использована программа SOLIDWORKS
) и изготовлен корпус квадрокоптера из подходящего
материала – стеклотекстолита.
3. Квадрокоптер собран и откалиброван в программе
Betaflight (версия 4.3.0)
9.
Проблемы и их решения1.
Выбор материала:
При выборе между карбоном и стеклотекстолитом, был выбран второй
вариант, так как при существенной разнице стоимости в пользу стеклотекстолита,
он практически не уступает по прочности карбону. Для макетирования сборки
использовался пластик ABS.
2.
Проблема с недостатком информации о создании собственного
БПЛА:
Информация собиралась на онлайн-форумах, различных вебсайтах и сообществах, посвященных созданию беспилотных летательных
аппаратов, а после выполнялись математические расчеты.
3.
Проблема с высоким бюджетом при малосерийном
производстве:
Запуск серийного производства, которое может снизить риск возникновения
дефектов при сборке и упростить процесс. Это также может обеспечить экономию
за счет масштаба, что может снизить стоимость отдельных компонентов.
10.
КАЛИБРОВКА ВBETAFLIGHT
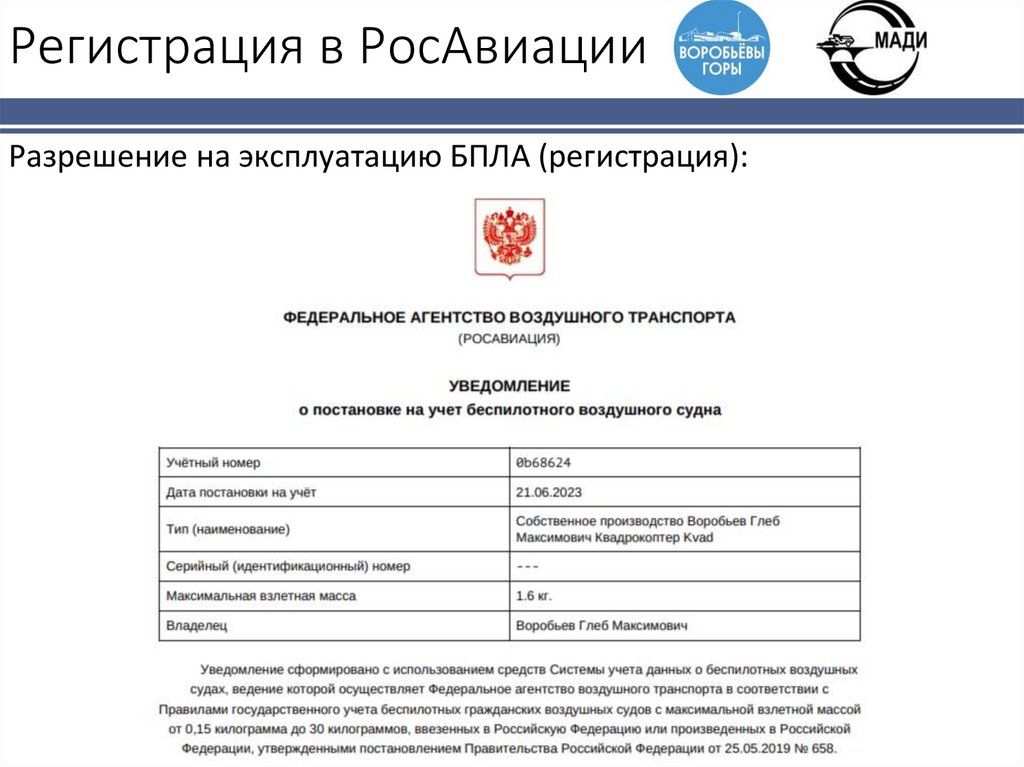
11.
Регистрация в РосАвиацииРазрешение на эксплуатацию БПЛА (регистрация):