





 electronics
electronicsSimilar presentations:









Разработка и реализация манипулятора руки с использованием механических и электронных компонентов
1.
Государственное бюджетное общеобразовательное учреждение города Москвы «Школа №2117»ТЕМА: «РАЗРАБОТКА И РЕАЛИЗАЦИЯ
МАНИПУЛЯТОРА РУКИ С ИСПОЛЬЗОВАНИЕМ
МЕХАНИЧЕСКИХ И ЭЛЕКТРОННЫХ
КОМПОНЕНТОВ»
Автор:
ученик 10А класса,
ГБОУ «Школа №2117»,
Моргунов Вячеслав Дмитриевич
Руководитель:
учитель физики,
ГБОУ «Школа №2117»,
Тетерева Ольга Владимировна
г.Москва, г.Щербинка, 2024
2.
Обоснование проектаВ свете актуальности робототехники в проекте желание воссоздать
собственную версию руки-манипулятора для выполнения простых задач.
Для достижения данной цели предполагается применение 3D печати, а
также программирования при помощи Arduino Таким образом,
использование Arduino становится ключевым фактором для полного
функционирования руки-манипулятора, а также для поставления задач
данному прибору
3.
Актуальность проекта- Автоматизированное и безопасное производство
- Преодоление физических ограничений в задачах на пределе
человеческой выносливости
- Устранение негативных факторов,которые оказывают отрицательное
воздействие на человека
4.
ГипотезаПредполагается, что применение манипуляторной руки для выполнения
промышленных и повседневных задач обеспечит возможность улучшения
качества и стабильности работы. Процесс разработки на базе интегрированной
среды предоставит гибкость и удобство в создании, способствуя тем самым
решению проблемы большого количества работы, а также работы с негативновлияющими на человека веществами и материалами. Гипотеза подразумевает,
что данная методология поможет изучить вклад в развитие инновационных
технологий через Arduino и 3D печать
5.
Цели- Повышение навыка программирования в Arduino
- Создание прототипа манипуляторной руки
6.
Задачи- Создание программы-кода для манипуляторной руки
- Моделирование деталей под 3D печать для руки-манипулятора
- Сборка и проверка работоспособности прототипа
7.
Научная новизнаИнновации программирования использованием интегрированной
среды разработки. Проект предполагает создание руки-манипулятора,
в основе которого лежит перечень функций, разработанные с
применением интегрированной среды разработки Arduino. Это может
решить проблемы предприятий
Эффективное использование программирования. Проект внедряет
написание кода на интегрированной среде разработки для создания
руки-манипулятора. Это представляет собой инновационный подход к
решению проблемы превышения человеческих возможностей и
здоровья, что может быть революционным в области промышленности
8.
Практическая значимость• Популяризация робототехники в производстве. Проект
может служить примером успешного внедрения
робототехники в промышленных целях, способствуя
ее популяризации в промышленном сообществе
• Гибкое программирование на определённый ряд
задач
• Таким образом, проект обладает не только научной
новизной в области робототехники, но и имеет
практическую значимость, вносящую вклад в развитие
и внедрение технологий и программирования в
Рис.1 Робот-сварщик(рука-манипулятор с сварочным
аппаратом)
производственные процессы
9.
Материалы,использованные в проекте• Компьютер и периферийные устройства:
Использование высокопроизводительного
компьютера и необходимых периферийных устройств
для эффективного запуска интегрированной среды
разработки Arduino
• Интегрированная среда разработки Arduino: Основной
инструмент для программирования, используемый
для создания руки-манипулятора
• Интернет-ресурсы и онлайн-платформы: Поиск и
анализ различных ресурсов для вдохновения, а также
для изучения тенденций в программировании
• Исследование и анализ более эффективной
разработки кода в Arduino
10.
Представление проектаПрограмма-код для полного функционирования руки-манипулятора и выполнения
ею простых задач при помощи контроллера
11.
12.
13.
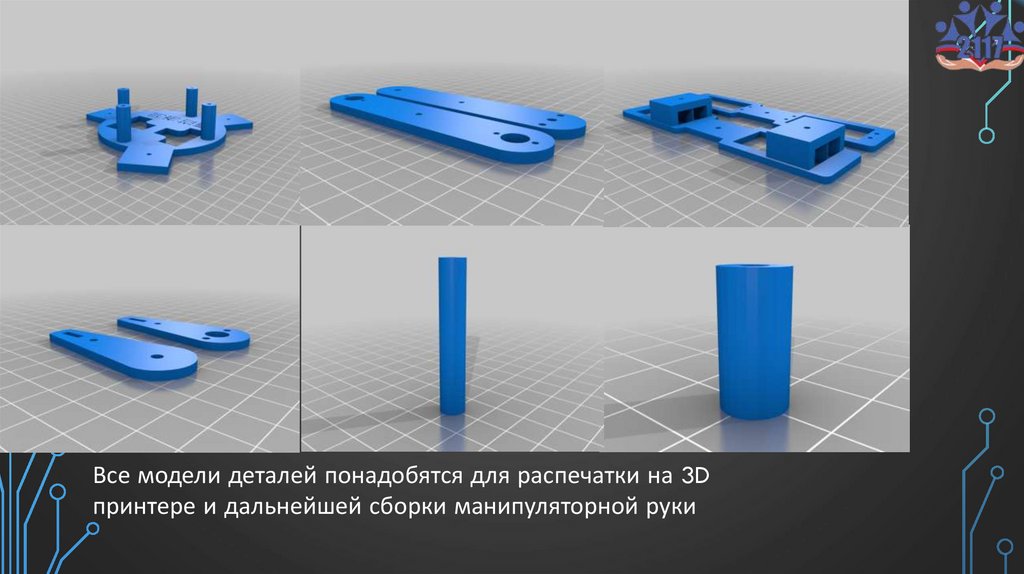
Детали для руки-манипулятора в цифровом виде14.
Все модели деталей понадобятся для распечатки на 3Dпринтере и дальнейшей сборки манипуляторной руки
15.
Манипуляторная рука в собранном виде16.
Результаты- Написан программа-код для манипуляторной руки
- Создана цифровая модель манипуляторной руки, для дальнейшей
печати на 3D принтере
17.
ВыводыИнтегрированная среда разработки Arduino оказалась мощным инструментом для
создания кода руки-манипулятора. Ее функциональность позволила реализовать
функциональные идеи с высокой степенью точности
Проект позволил внедрить инновационные элементы в робототехнику, что способствует
созданию уникальных продуктов, способных привлечь внимание пользователей
Проект открывает перспективы для расширения робототехники, а также для внедрения
новых технологий и инноваций в области промышленной робототехники и её
автоматизации
• Таким образом, проект демонстрирует использование передовых технологий и
удовлетворение потребностей занятых и многозадачных предприятий, предоставляя
перспективы для дальнейшего развития и успеха
18.
Использованная литература и интернет-ресурсы• https://studbooks.net/2530398/tovarovedenie/analiz_promyshlennyh_robo
tov_manipulyatorov
• https://st-urman.ru/foto/roboty-dlya-proizvodstva-mebeli.html
• https://www.thingiverse.com/thing:1215831