











 lingvistics
lingvisticsSimilar presentations:










点法零点补偿介绍
1.
GR-C控制系统机器人二十点法零点补偿
系统研发三室 黄家煜
2022年2月14日
2.
目录1.二十点法零点补偿介绍
2.二十点法零点补偿原理
3.二十点法零点补偿操作
4.功能使用注意事项
3.
1.二十点法补偿功能介绍
“零点”是机器人坐标系的基准 没有零点机器人就没办法判断自
身的位置信息 通常机器人在出厂前会对机器人的机械参数进行标定
给出机器人各连杆参数、减速比和零点位置 但是在特殊情况下 例如
更换电池、超越机械极限位置与周边环境发生碰撞等均会造成零点的丢
失 在这种情况下 我们需要一种简易找回机器人当前零点位置的方法
确保机器人能精确的运动控制 2.24及以上的版本支持该功能
4.
2.二十点法零点补偿原理
在工业机器人应用过程中 安装更换工具时需要重新标定工具坐标
系 一般情况下我们的工具坐标通过固定点约束的 3 点法进行标定 此
方式在机器人本身零点位置不准确的情况下往往会得到一个较差的结果。
【二十点法零点补偿】功能是针对六轴串联机器人的零点位置和工
具坐标的偏差提出了一种简便有效的自整定算法。通过固定机器人 TCP
点位置、改变姿态的方式 基于空间内一个固定点的约束关系 在已知
机器人连杆参数的情况下建立机器人坐标变换模型 取 20 组机器人关
节角数据作为辨识条件参数 此时机器人工具坐标与零点位置的偏差作
为未知数据 通过最小二乘法计算出工具坐标与零点位置的偏差数据
因此 【二十点法零点补偿】功能的使用前提 是针对出厂标定过
的六自由度串联机器人 有准确的连杆参数和轴减速比
5.
3.二十点法零点补偿操作
功能路径 【主页面】-【系统设置】-【零点补偿】
6.
3.二十点法零点补偿操作
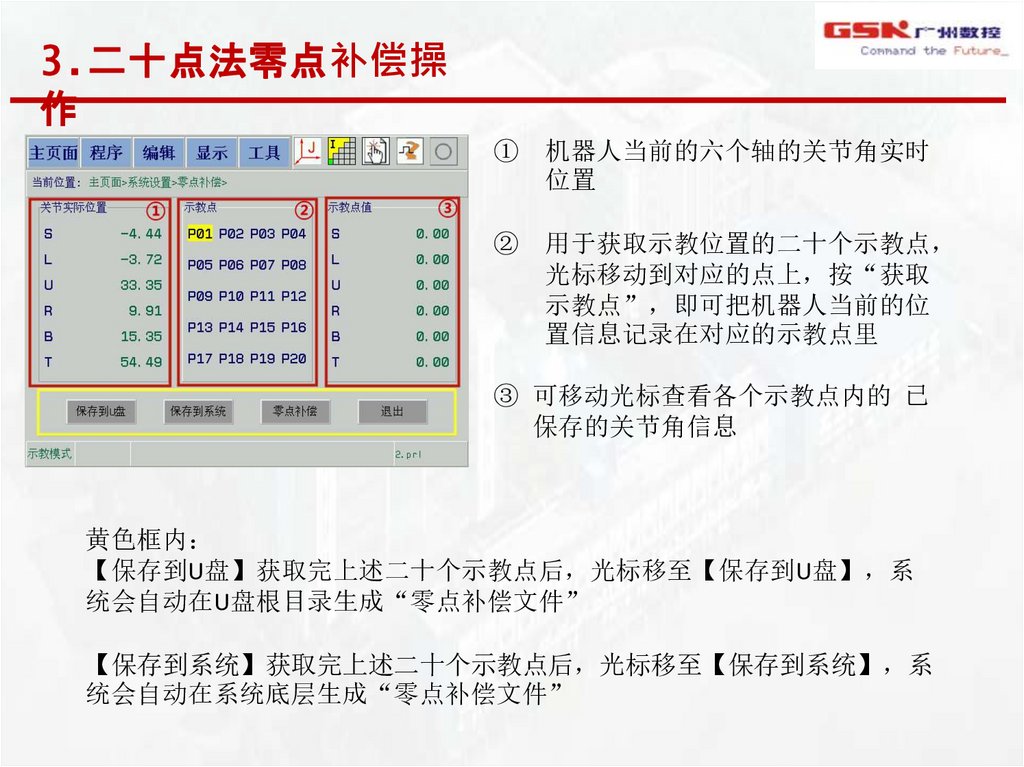
①
机器人当前的六个轴的关节角实时
位置
②
用于获取示教位置的二十个示教点
光标移动到对应的点上 按“获取
示教点” 即可把机器人当前的位
置信息记录在对应的示教点里
③ 可移动光标查看各个示教点内的 已
保存的关节角信息
黄色框内
【保存到U盘】获取完上述二十个示教点后 光标移至【保存到U盘】 系
统会自动在U盘根目录生成“零点补偿文件”
【保存到系统】获取完上述二十个示教点后 光标移至【保存到系统】 系
统会自动在系统底层生成“零点补偿文件”
7.
3.二十点法零点补偿操作
机器人零点标定操作步骤
1.制作两个单端尖锐 越尖越好 对的越准 标定精度越高 的标定端 焊
枪的焊丝建议磨尖 一个安装在机器人末段 一个安装在机器人外固定位
置上
2.然后操作机器人 将机器人末段的尖点移动和外部标定尖对准 获取一个
示教点 根据该操作获取20个不同的位置数据。
前3个点建议按照五点法对工具的三个点姿态获取 后续17个点以尖点对尖
点、不同姿态的方式下获取
3.完成上述操作 在示教器上插入U盘 按【零点补偿】界面下方的 【保
存到U盘】 即可在U盘根目录生成补偿文件 文件名 20POINTS.TXT
8.
3.二十点法零点补偿操作
机器人零点标定操作步骤
4.在电脑端安装“零点补偿”软件Zero_Calibration
5.打开“零点补偿”软件
9.
3.二十点法零点补偿操作
机器人零点标定操作步骤
6.在电脑上插入U盘 点击软件红框标注的“请打开文件” 在弹出的目录
中选择U盘 找到文件名 20POINTS.TXT 点击“打开”即可将标定文件导
入软件中
10.
3.二十点法零点补偿操作
机器人零点标定操作步骤
7. 点击软件中的“计算”即可出现标定结果
11.
3.二十点法零点补偿操作
机器人零点标定操作步骤
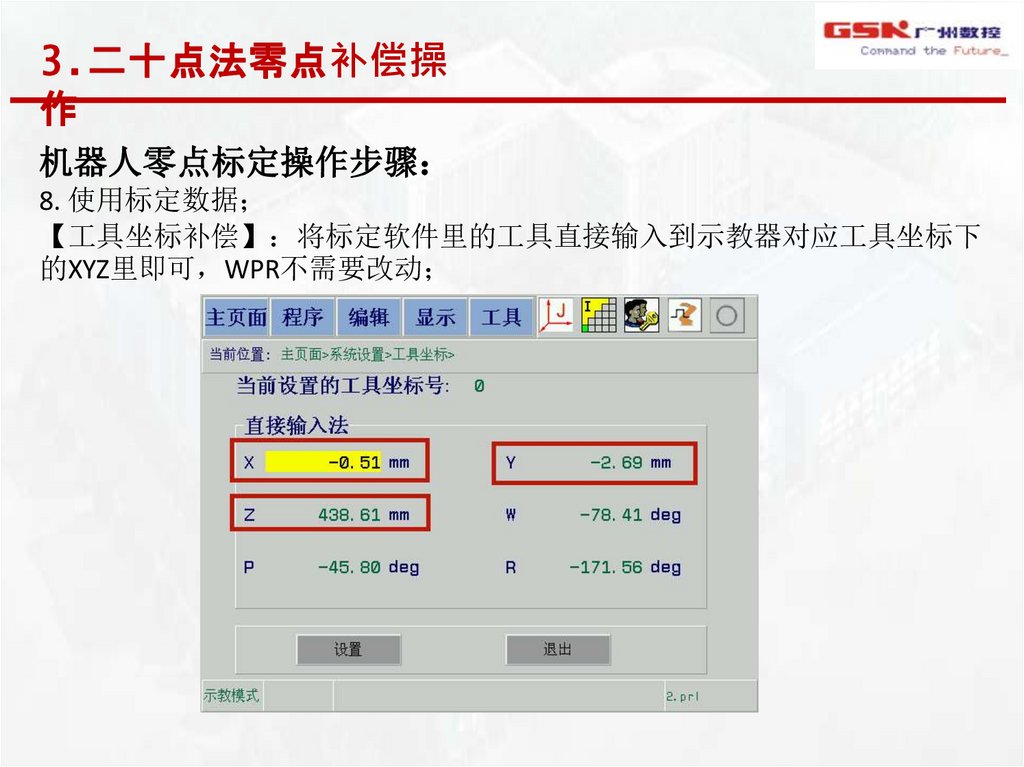
8. 使用标定数据
【工具坐标补偿】 将标定软件里的工具直接输入到示教器对应工具坐标下
的XYZ里即可 WPR不需要改动
12.
3.二十点法零点补偿操作
机器人零点标定操作步骤
8. 使用标定数据
【零点补偿】 将标定软件里的各轴数值取反后 对应输入【作业原点】中
注意这里要将数值取反 如标定软件的值是正数 则这里输入负数 数值不
变 标定软件的值是负数 则这里输入正数 数值不变
然后在示教模式下 手动上使能按前进 让机器人各轴运行到下方的关
节角度位置
13.
3.二十点法零点补偿操作
机器人零点标定操作步骤
8. 使用标定数据
【零点补偿】 将标定软件里的各轴数值取反后 对应输入【作业原点】中
注意这里要将数值取反 如标定软件的值是正数 则这里输入负数 数值不
变 标定软件的值是负数 则这里输入正数 数值不变
然后在示教模式下 手动上使能按前进 让机器人各轴运行到下方的关
节角度位置
14.
3.二十点法零点补偿操作
机器人零点标定操作步骤
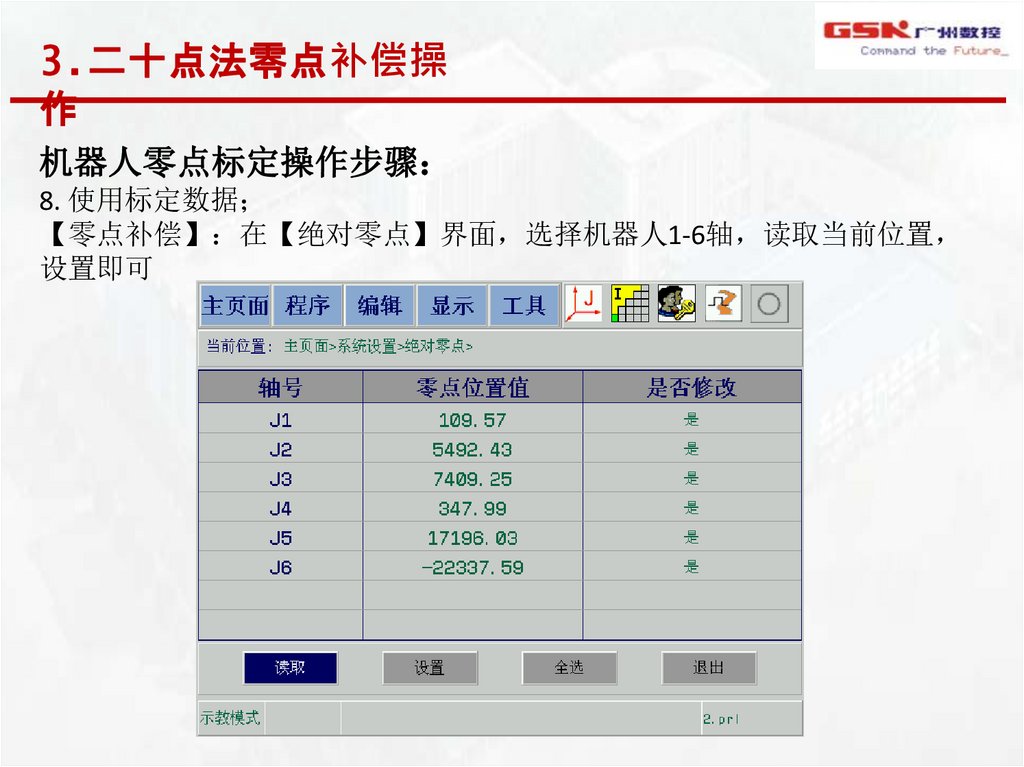
8. 使用标定数据
【零点补偿】 在【绝对零点】界面 选择机器人1-6轴 读取当前位置
设置即可
15.
4.功能使用注意事项① 目前该功能仅针对六轴机器人使用 四轴码垛暂不适用
② 2.24及以上版本支持该功能
③ 使用该功能的机器人建议出厂时标定过机械参数 连杆参数、减速比等
否则可能会影响最终的使用效果
④ 该功能主要针对零点基准位置补偿 如机器人发生外部碰撞导致零点偏
差 建议先按照机器人本体上的零点刻度将零点大概位置对回 再通过该功
能找回准确的零点
16.
实操部分实操部分