

















 informatics
informatics software
softwareSimilar presentations:










Формализация при автоматизированном проектировании электронных средств. Лекция 1
1. Системы автоматизированного проектирования электронных средств Часть 1
Лекторы: ст.преподаватель кафедры ЭТТЛушакова Мария Сергеевна;
доцент кафедры ЭТТ БГУИР
Бондарик Василий Михайлович
bondarik@bsuir.by
2. Лекция 1 Формализация при автоматизированном проектировании электронных средств
1 Комплексная автоматизацияпроектирования, производства и эксплуатации
ЭС
2 Основы теории графов и их применение в
САПЭС
3 Описание графов с помощью матриц
4 Формальное описание коммутационных
схем и монтажного пространства
3. Вопрос 1 Комплексная автоматизация проектирования, производства и эксплуатации ЭА
4.
Проектированиеоснастки
Испытания
опытного образца
Технический
проект
Планирование
производства
Изготовление и
контроль качества
Жизненный цикл
изделия
Эскизный
проект
Требования и
планирование
Продажа
Поддержка
и ремонт
Утилизация
5.
Эффективность внедрения CALS- технологийПредварительное
проектирование
Конструирование
Предварительное
проектирование
Черчение
Подготовка
производства
Конструирование
Черчение
Подготовка
производства
Изготовление
Проверка
Сборка
Изготовление
Проверка
Сборка
6.
Эффективность применения ИТАПУдовлетворение требований к
качеству и
производительности продукта
Гибкость освоения
новых рынков
Быстрое
реагирование на
требования рынка –
новые варианты
Послепродажное
обслуживание
Сокращение затрат на
разработку путем
увеличения
эффективности
Лучшее удовлетворение
требований заказчика,
настройка под заказ
Быстрое начало
производства
Сокращение затрат путем
сокращения числа
поздних изменений
База знаний
обеспечивает
быстрый старт
новых проектов
7.
Преимущества применения САПЭС1. Уменьшение времени цикла за счет изменения
процессов
2. Высвобождение дополнительного времени на
предварительное проектирование для поиска
оптимального решения
3. Повышение производительности труда
инженеров
4. Снижение стоимости разработки
5. Уменьшение количества разработчиков
6. Улучшение качества и сокращение затрат.
Создается основа для последующих улучшений
7. Качественный скачок к достижению
поставленных целей.
8.
Определение САПРСистема автоматизированного
проектирования (САПР) – организационнотехническая система, состоящая из
комплекса средств автоматизированного
проектирования, связанных с
подразделениями проектных организаций, и
выполняющая автоматизированное
проектирование.
9.
Подсистемы автоматизации трудав производстве ЭС
1.Автоматизированные системы научных
исследований
2.Системы автоматизированного
проектирования
3.Автоматизированные системы ТПП
4.Автоматизированные системы управления
производством
5.Автоматизированные системы
комплексных испытаний
10.
Типовые операции обработкиинформации
при производстве ЭС
1. Поиск и выбор из различных источников
информации
2. Анализ
3. Расчет
4. Принятие проектных решений
5. Оформление проектных решений
11.
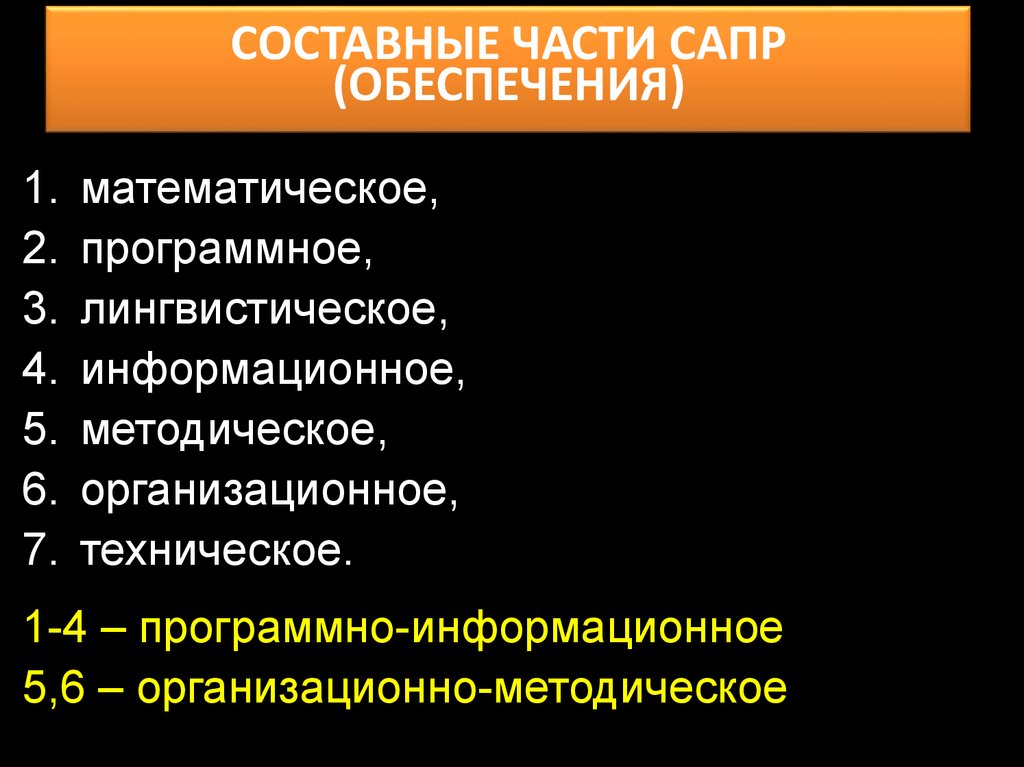
СОСТАВНЫЕ ЧАСТИ САПР(ОБЕСПЕЧЕНИЯ)
1. математическое,
2. программное,
3. лингвистическое,
4. информационное,
5. методическое,
6. организационное,
7. техническое.
1-4 – программно-информационное
5,6 – организационно-методическое
12.
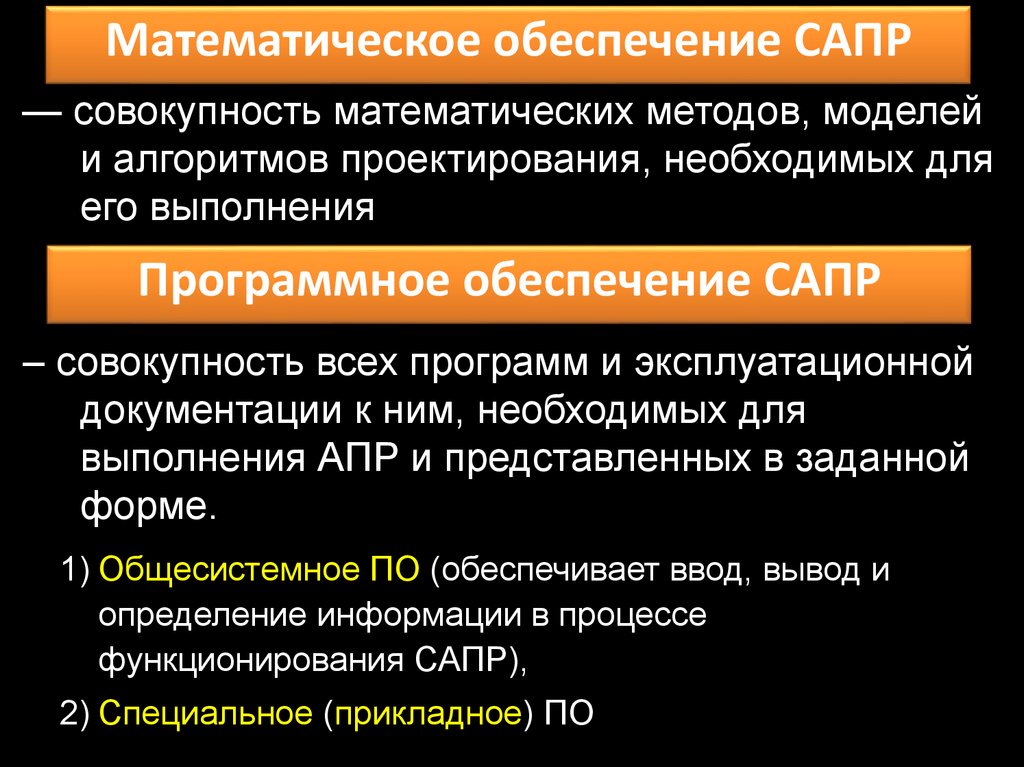
Математическое обеспечение САПР— совокупность математических методов, моделей
и алгоритмов проектирования, необходимых для
его выполнения
Программное обеспечение САПР
– совокупность всех программ и эксплуатационной
документации к ним, необходимых для
выполнения АПР и представленных в заданной
форме.
1) Общесистемное ПО (обеспечивает ввод, вывод и
определение информации в процессе
функционирования САПР),
2) Специальное (прикладное) ПО
13.
Лингвистическое обеспечение САПР— совокупность языков проектирования, включая
термины и определения, правила формализации
естественного языка и методы сжатия и
развертывания текстов, необходимых для
автоматизации проектирования.
а) Языки программирования
б) Языки проектирования
в) Языки управления
Информационное обеспечение САПР
– совокупность сведений, необходимых для
выполнения автоматизированного проектирования в
заданной форме.
Основная функция ИО - обеспечение создания,
поддержки и организации доступа к данным
14.
Методическое обеспечение САПР— комплект документов, устанавливающих состав и
правила отбора и эксплуатации средств
обеспечения проектирования.
Организационное обеспечение САПР
– комплект документов, устанавливающих состав
проектной организации и ее подразделений, связи
между ними, их функции, а также форму
представления результата проектирования и
порядок рассмотрения проектных документов
15.
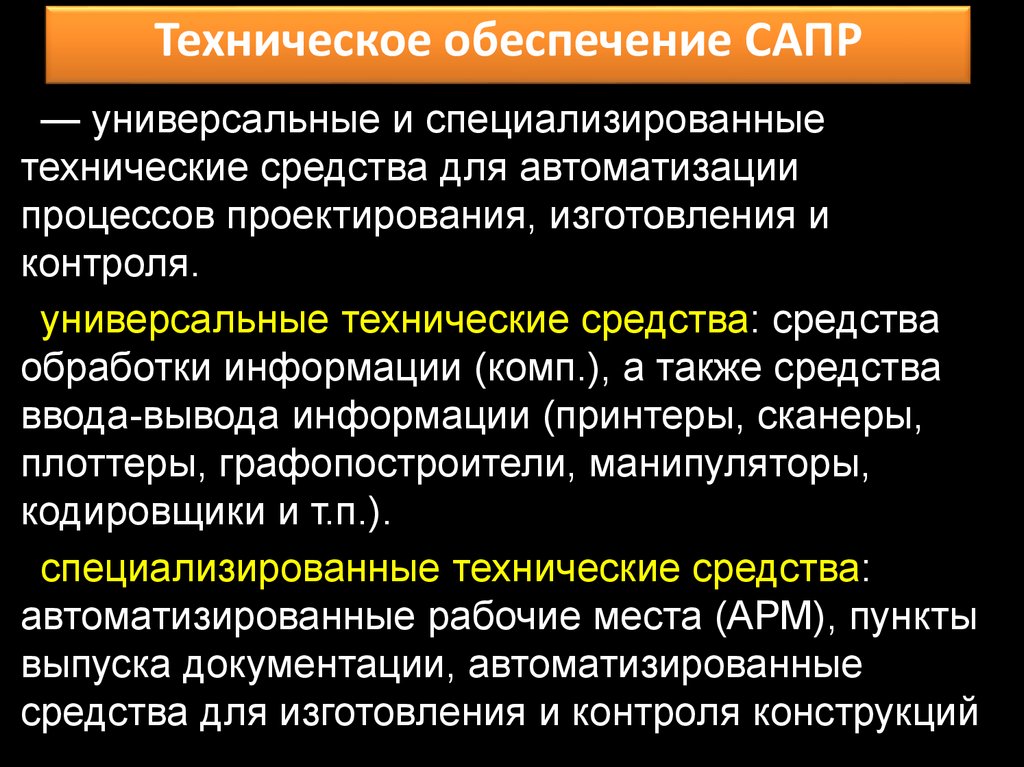
Техническое обеспечение САПР— универсальные и специализированные
технические средства для автоматизации
процессов проектирования, изготовления и
контроля.
универсальные технические средства: средства
обработки информации (комп.), а также средства
ввода-вывода информации (принтеры, сканеры,
плоттеры, графопостроители, манипуляторы,
кодировщики и т.п.).
специализированные технические средства:
автоматизированные рабочие места (АРМ), пункты
выпуска документации, автоматизированные
средства для изготовления и контроля конструкций
16. Вопрос 2 Основы теории графов и их применение в САПЭС
17.
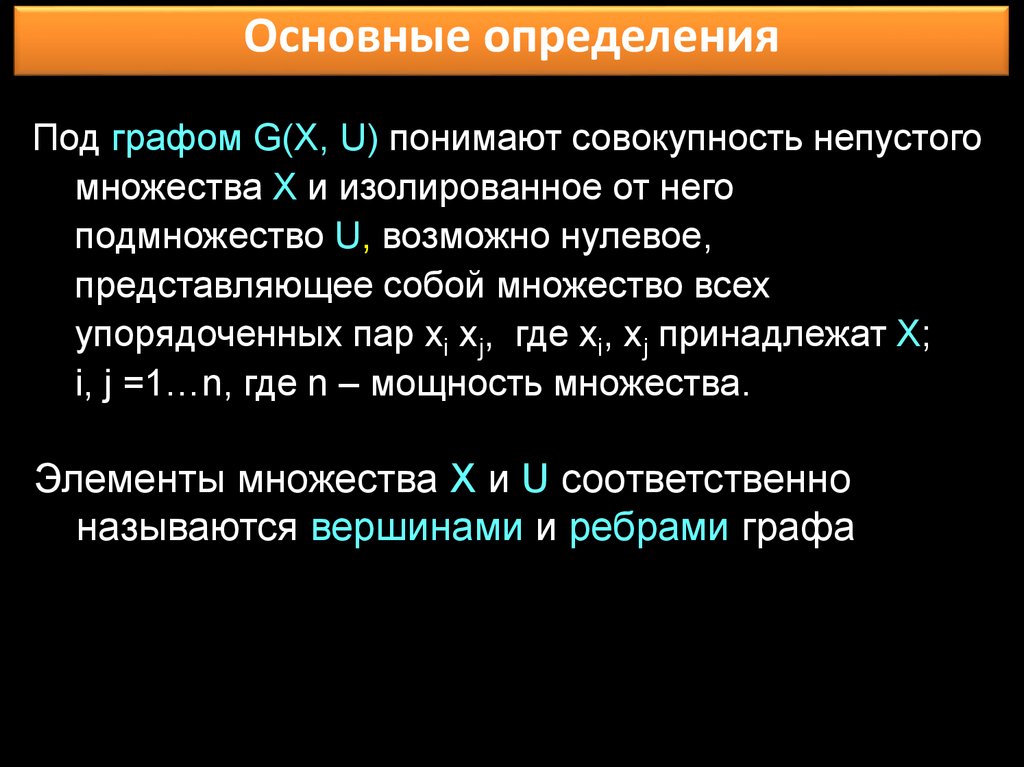
Основные определенияПод графом G(X, U) понимают совокупность непустого
множества Х и изолированное от него
подмножество U, возможно нулевое,
представляющее собой множество всех
упорядоченных пар xi xj, где xi, xj принадлежат X;
i, j =1…n, где n – мощность множества.
Элементы множества X и U соответственно
называются вершинами и ребрами графа
18.
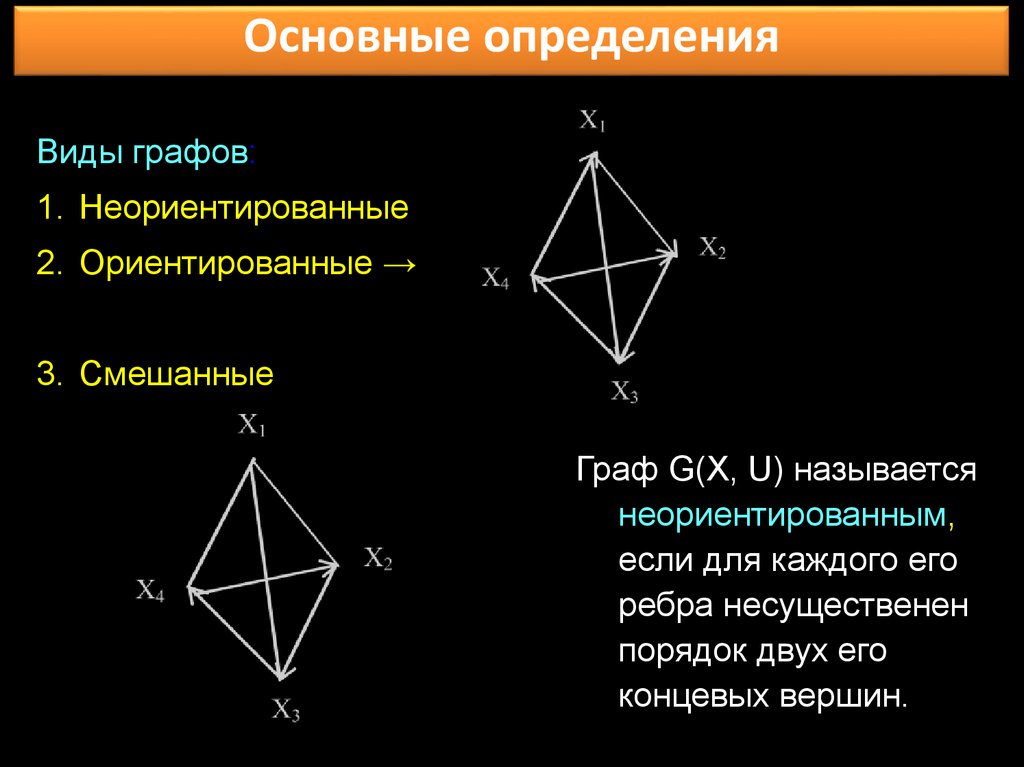
Основные определенияВиды графов:
1. Неориентированные
2. Ориентированные →
3. Смешанные
Граф G(X, U) называется
неориентированным,
если для каждого его
ребра несущественен
порядок двух его
концевых вершин.
19.
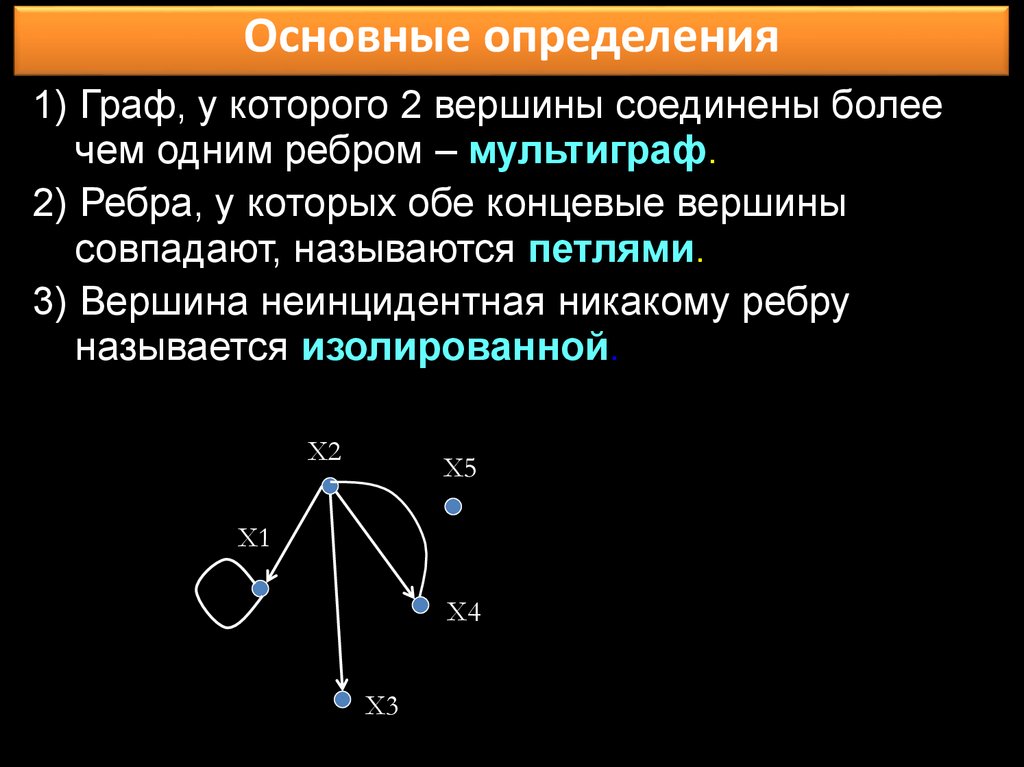
Основные определения1) Граф, у которого 2 вершины соединены более
чем одним ребром – мультиграф.
2) Ребра, у которых обе концевые вершины
совпадают, называются петлями.
3) Вершина неинцидентная никакому ребру
называется изолированной.
X2
X5
X1
X4
X3
20.
Основные определенияЧисло ребер инцидентных некоторой вершине xi
называется степенью вершины.
Граф, состоящий только из изолированных вершин
называется нуль-графом.
Граф конечен, если содержит конечное число
вершин и ребер.
Конечный граф, у которого отсутствуют петли и
изолированные вершины называется
регулярным.
21.
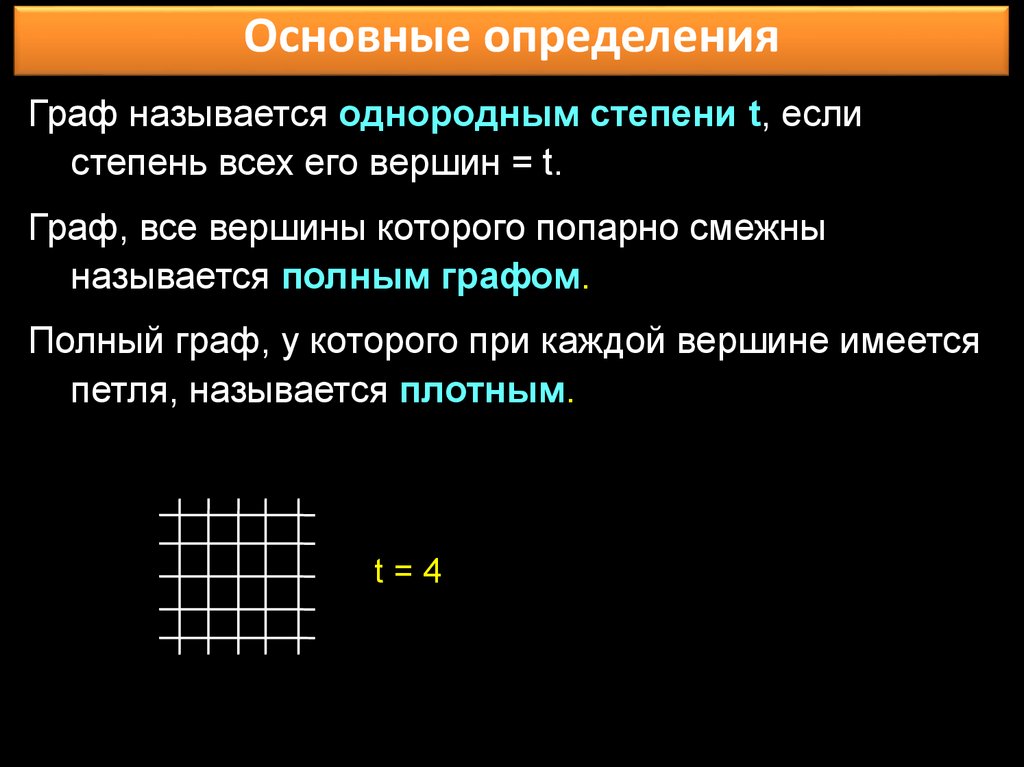
Основные определенияГраф называется однородным степени t, если
степень всех его вершин = t.
Граф, все вершины которого попарно смежны
называется полным графом.
Полный граф, у которого при каждой вершине имеется
петля, называется плотным.
t=4
22.
Основные определенияГраф, в котором перемещаясь по ребрам из
вершины в вершину можно попасть в каждую
вершину называется связным графом.
Число, характеризующее разность между числом
верши графа (мощностью) n и числом
компонент связности p называют рангом графа
(R(G).
Один и тот же граф может иметь различные
геометрические реализации (изоморфные
графы).
23.
Основные определенияЦиклом называется последовательность ребер,
при которой в результате обхода вершин графа
по этим ребрам возвращаются в исходную
вершину.
Последовательность ребер при переходе от одной
вершины к другой называется цепью.
Эйлеров цикл – это цикл, в котором содержатся
все ребра графа.
24.
Основные определенияЦикл называют Гамильтоновым, если он проходит
через каждую вершину графа только один раз.
Связной неориентированный граф, не содержащий
циклов, называется деревом.
Несвязной граф без циклов, отдельные компоненты
связности которого являются деревьями называется
лесом.
Под расстоянием между вершинами графа понимается
длина кротчайшей цепи, соединяющей эти
вершины.
Диаметр графа – это максимальное расстояние между
вершинами графа.
25.
Основные определенияОбъект H(X, E) считается гиперграфом, если он
состоит из множества вершин X и множества
ребер E, причем каждое ребро ei,
принадлежащее Е является некоторым
подмножеством множества Х. Т.е. множество Х
должно включать любое ребро ei.
При этом каждое ребро может соединять не только
две вершины, но и любое подмножество
множества вершин графа.
26. Вопрос 3 Описание графов с помощью матриц
27.
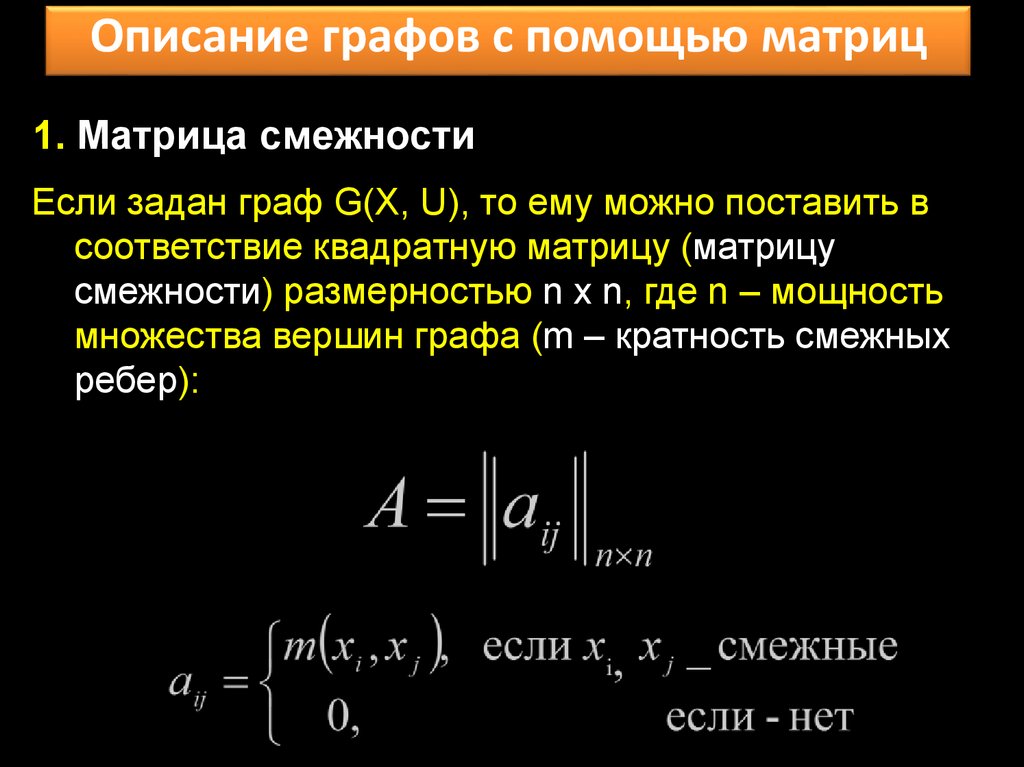
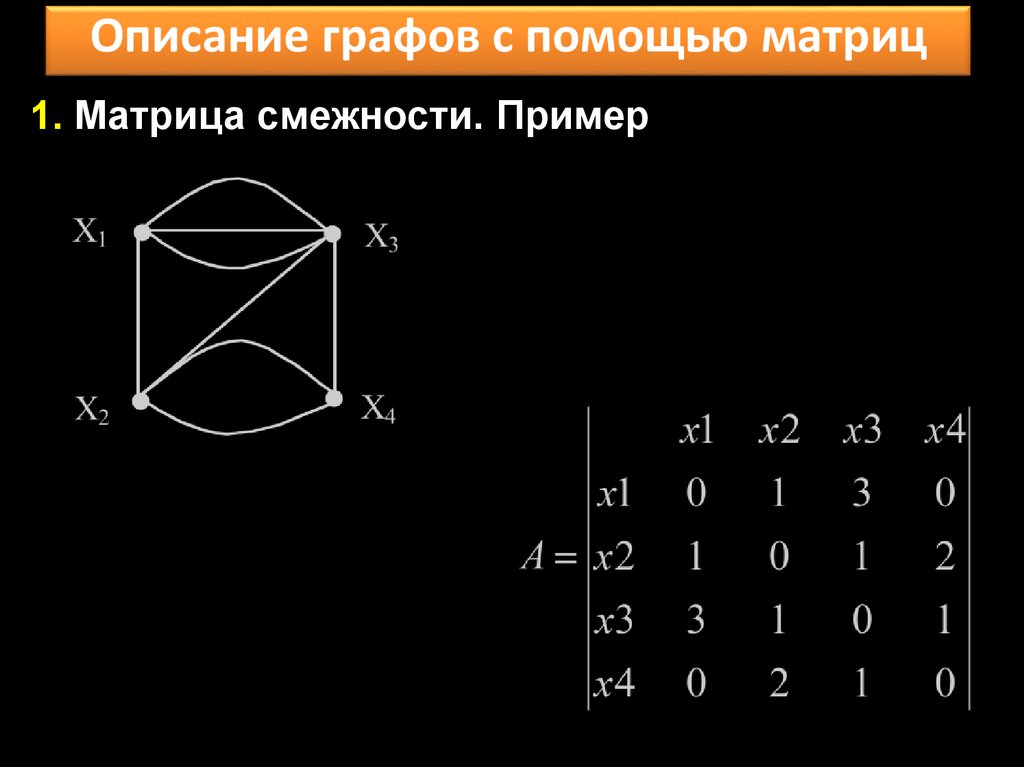
Описание графов с помощью матриц1. Матрица смежности
Если задан граф G(X, U), то ему можно поставить в
соответствие квадратную матрицу (матрицу
смежности) размерностью n x n, где n – мощность
множества вершин графа (m – кратность смежных
ребер):
28.
Описание графов с помощью матриц1. Матрица смежности. Пример
29.
Описание графов с помощью матриц2. Матрица весовых соотношений
строятся аналогично матрицам смежности, но
значения их элементов определяются весом ребра
графа (Tij – вес связи):
30.
Описание графов с помощью матриц3. Матрица длин
Это квадратная матрица (Lij – длина ребра):
31.
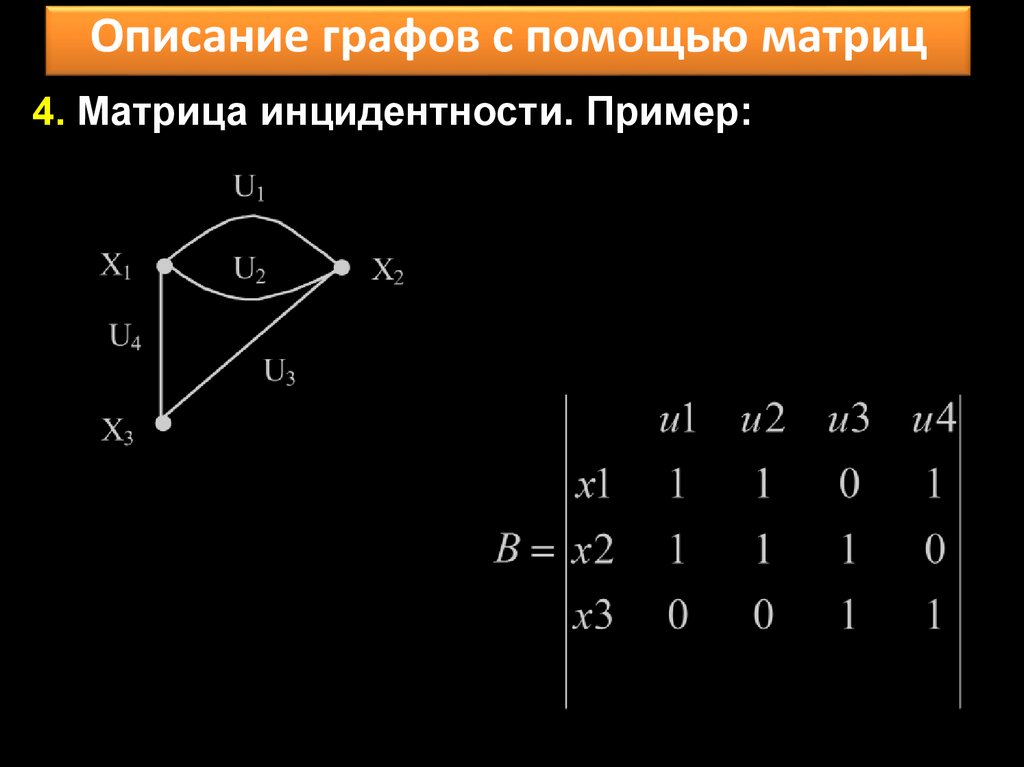
Описание графов с помощью матриц4. Матрица инцидентности
Представляет собой прямоугольную матрицу. Строки
матрицы соответствуют вершинам, а столбцы –
ребрам графа
32.
Описание графов с помощью матриц4. Матрица инцидентности. Пример:
33.
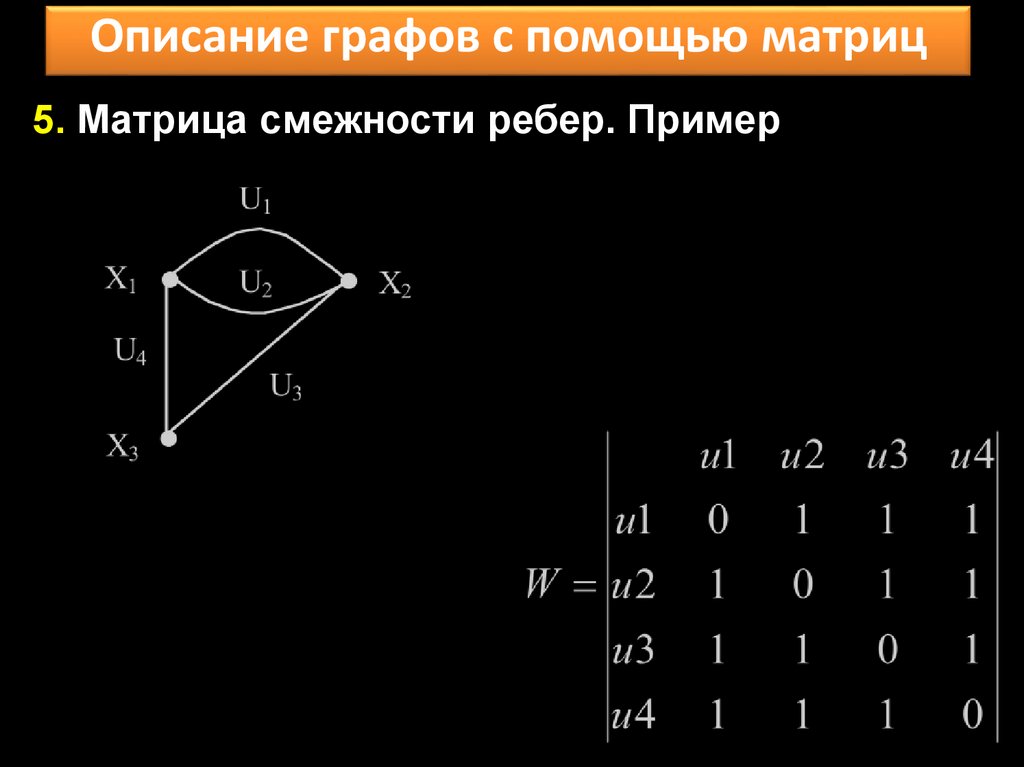
Описание графов с помощью матриц5. Матрица смежности ребер
Эта матрица, элементы которой образуются по
правилу
34.
Описание графов с помощью матриц5. Матрица смежности ребер. Пример
35. Вопрос 4 Формальное описание коммутационных схем и монтажного пространства
36.
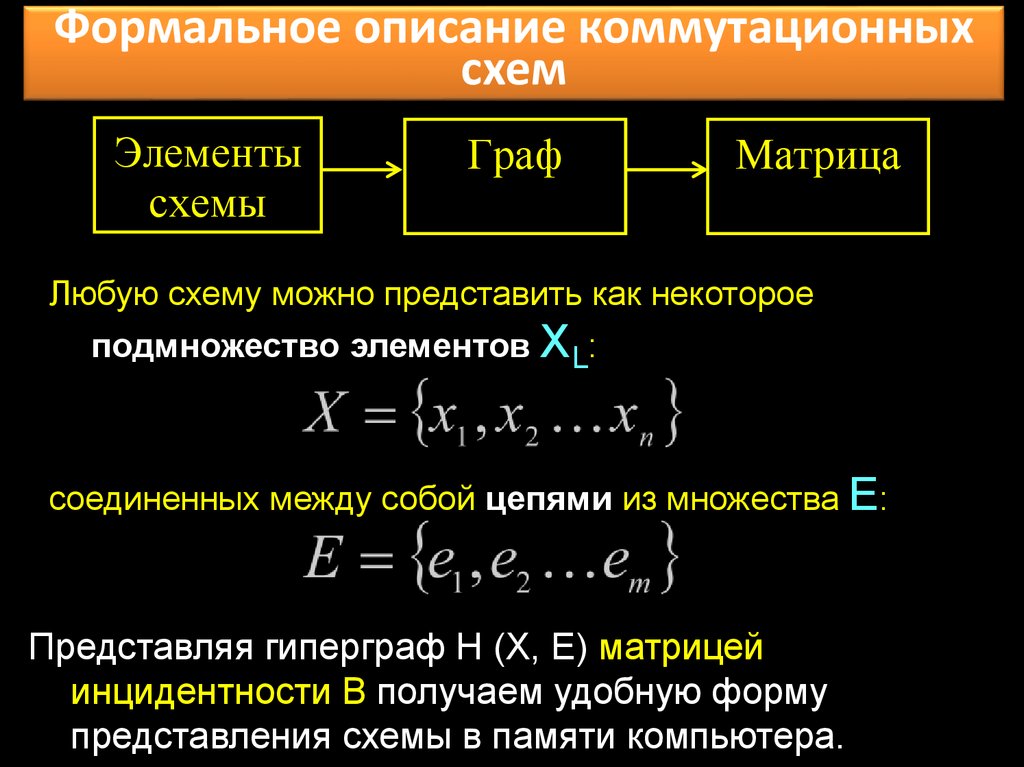
Формальное описание коммутационныхсхем
Элементы
схемы
Граф
Матрица
Любую схему можно представить как некоторое
подмножество элементов XL:
соединенных между собой цепями из множества Е:
Представляя гиперграф H (X, E) матрицей
инцидентности B получаем удобную форму
представления схемы в памяти компьютера.
37.
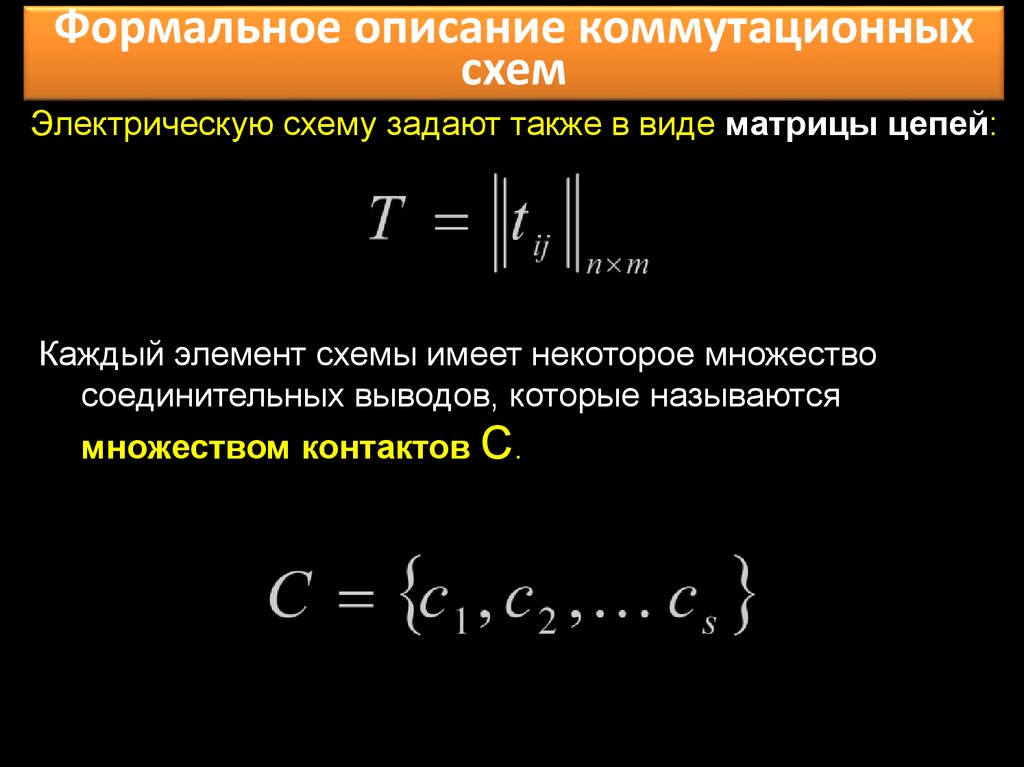
Формальное описание коммутационныхсхем
Электрическую схему задают также в виде матрицы цепей:
Каждый элемент схемы имеет некоторое множество
соединительных выводов, которые называются
множеством контактов C.
38.
Формальное описание коммутационныхсхем
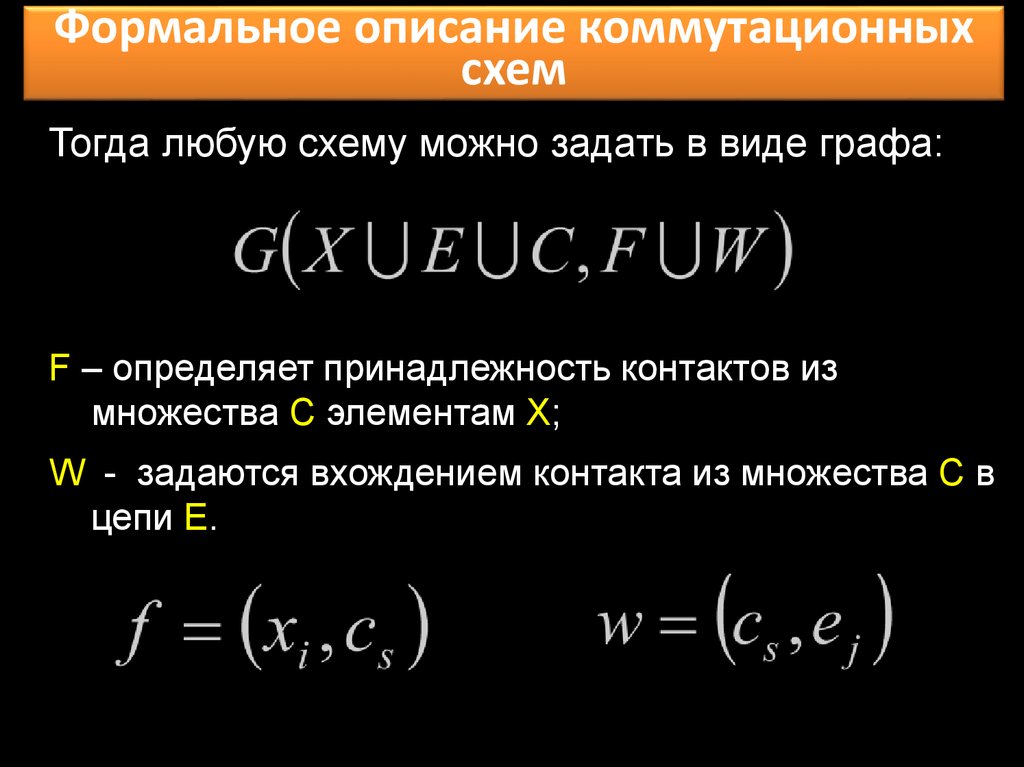
Тогда любую схему можно задать в виде графа:
F – определяет принадлежность контактов из
множества С элементам Х;
W - задаются вхождением контакта из множества С в
цепи Е.
39.
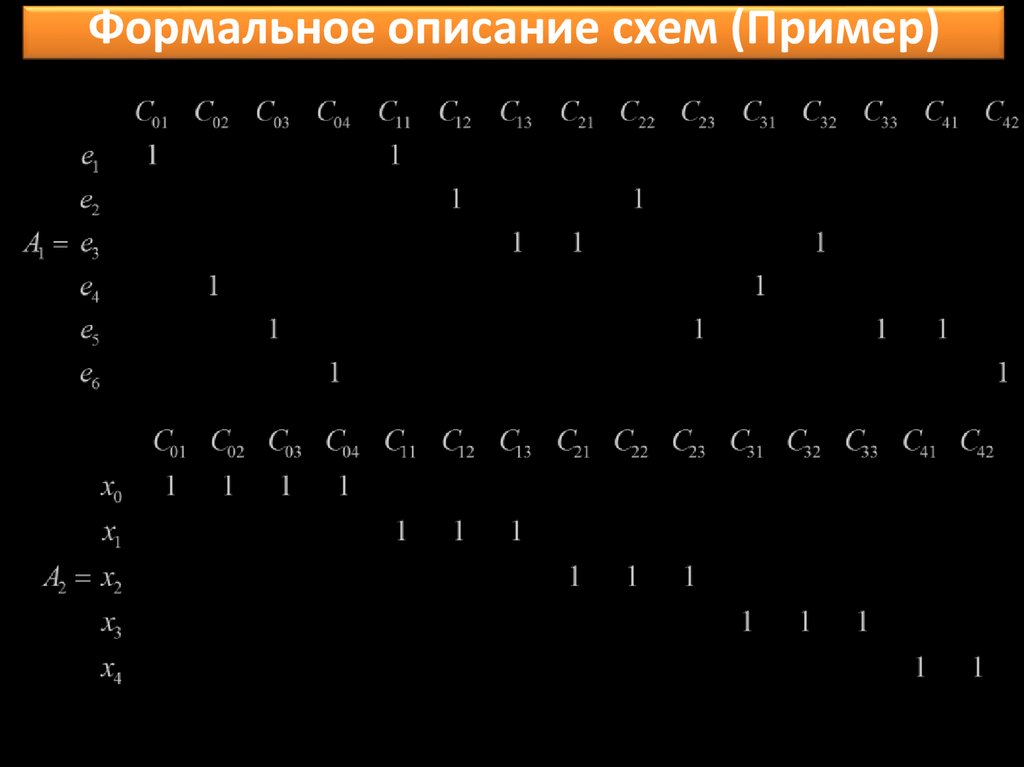
Формальное описание коммутационныхсхем (2 способ)
Граф вида G задается обычно в виде трехмерной
матрицы А, которую можно представить в виде двух
матриц А1, А2.
40.
Формальное описание коммутационныхсхем (Пример)
VT1
X1
1
R1
2
3
4
R2
VT2
41.
Формальное описание схем (Пример)l2
X01
l5
l1
1
2
X1 (VT1)
X02
1
3
l3
2
X2 (VT2)
l4
1
2
3
X3 (R1)
Матрица инцидентности:
X03
3
1
2
l6
X4 (R2)
Матрица цепей:
X04
42.
Формальное описание схем (Пример)43.
Модель монтажного пространства(монтажного поля)
δ
1
2
X
n
n+1
Y
Монтажным пространством элементов конструкций
называется некоторая область, ограниченная
габаритами этих элементов.
Двумерное монтажное пространство называется
монтажным полем.
Различают регулярное и нерегулярное монтажное поле.
44.
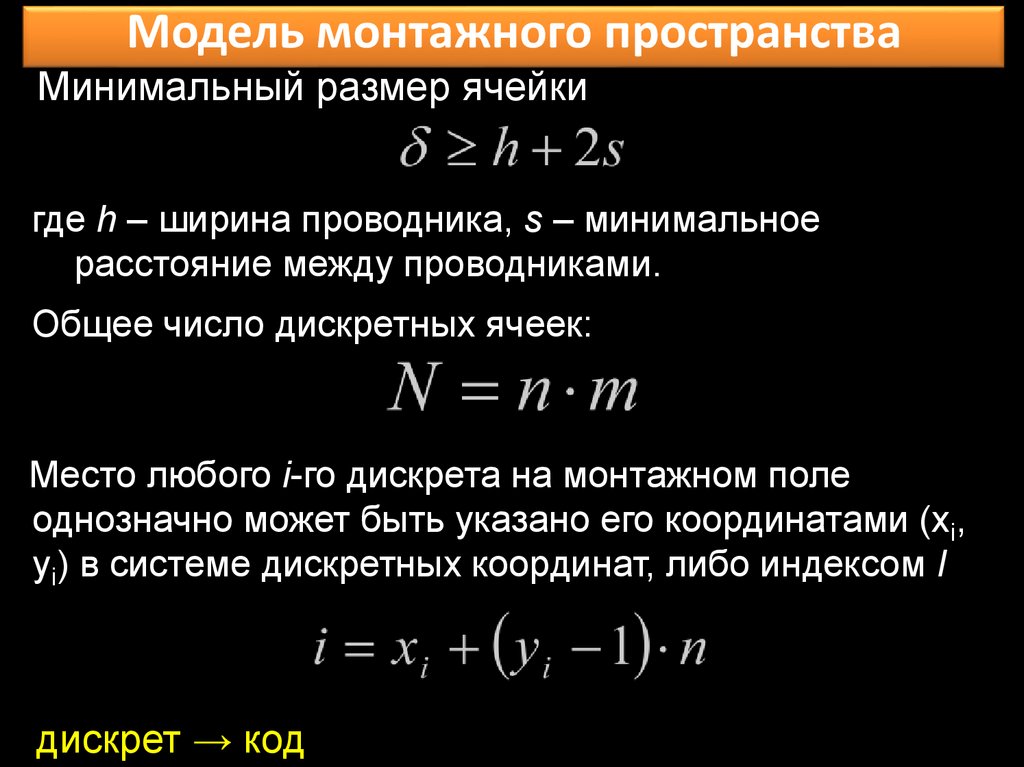
Модель монтажного пространстваМинимальный размер ячейки
где h – ширина проводника, s – минимальное
расстояние между проводниками.
Общее число дискретных ячеек:
Место любого i-го дискрета на монтажном поле
однозначно может быть указано его координатами (xi,
yi) в системе дискретных координат, либо индексом I
дискрет → код
45.
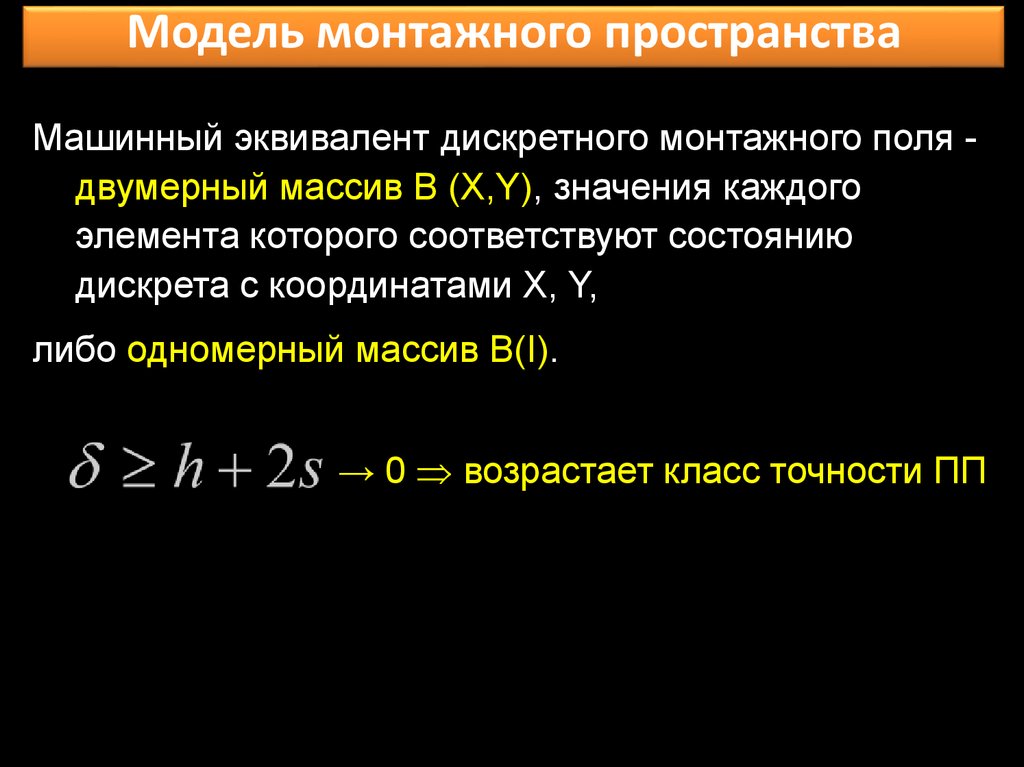
Модель монтажного пространстваМашинный эквивалент дискретного монтажного поля двумерный массив B (X,Y), значения каждого
элемента которого соответствуют состоянию
дискрета с координатами X, Y,
либо одномерный массив B(I).
→ 0 возрастает класс точности ПП
46.
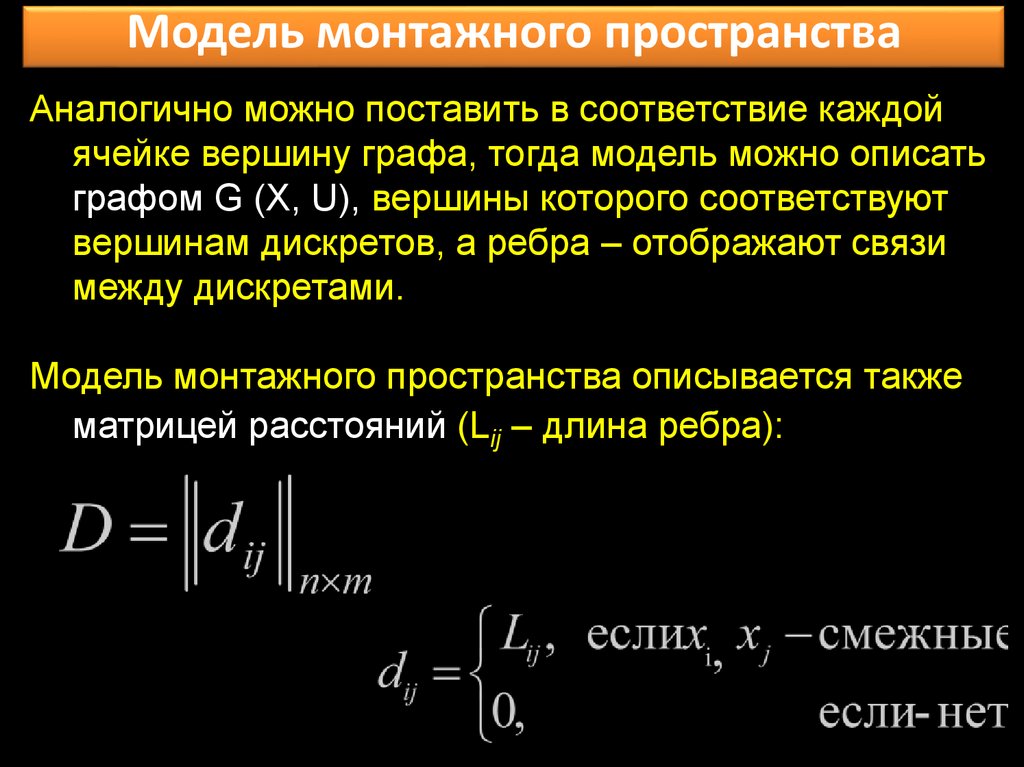
Модель монтажного пространстваАналогично можно поставить в соответствие каждой
ячейке вершину графа, тогда модель можно описать
графом G (X, U), вершины которого соответствуют
вершинам дискретов, а ребра – отображают связи
между дискретами.
Модель монтажного пространства описывается также
матрицей расстояний (Lij – длина ребра):
47.
Вопросы по прочитанномуматериалу?