






















 informatics
informaticsSimilar presentations:










Робототехника Ev3. Занятие 15. Инженерные решения
1.
5-8 классыРобототехника Ev3
Презентация занятия
Инженерные решения
15 занятие
2020
2.
РОБОТОТЕХНИКА EV3СОДЕРЖАНИЕ
1. ВВЕДЕНИЕ. ОРГАНИЗАЦИОННАЯ ИНФОРМАЦИЯ
Тема занятия
Цели и задачи занятия
Результаты занятия
Материалы для преподавателя
Материалы для ученика
Тайминг проведения занятия
2. ТЕОРЕТИЧЕСКАЯ ЧАСТЬ
Понятие захватного устройства
Программирование захватного устройства
Применение захватного устройства
3. ПРАКТИЧЕСКАЯ ЧАСТЬ
Сборка робота
Решение задач по программированию
inginirium.ru
2
3.
РОБОТОТЕХНИКА EV3ВВЕДЕНИЕ.
ОРГАНИЗАЦИОННАЯ ИНФОРМАЦИЯ
Тема: Инженерные решения.
Цели и задачи:
• Объяснить детям на доступном им языке, что такое схват
• Объяснить детям на доступном им языке, как работает схват
• Изучить методы сборки схватов
• Собрать робота
• Запрограммировать робота
По результатам занятия ребенок будет знать:
• Что такое захватное устройство
• Как программировать захватное устройство
inginirium.ru
3
4.
РОБОТОТЕХНИКА EV3Тема: Инженерные решения.
По результатам занятия ребенок будет уметь:
• Программировать захватное устройство
• Решать задачи с использованием схвата
Тайминг занятия
Таб.1
№
Этапы
время
1
Приветственное слово преподавателя
5 мин.
2
Повторение пройденного материала
15 мин.
3
Изучение новой темы
10 мин
4
Сборка робота
15 мин.
Перерыв
15 мин.
15 мин.
5
Изучение новых блоков
15 мин.
45 мин.
6
Программирование и запуск роботов
30 мин.
5 мин.
40 мин.
inginirium.ru
4
5.
5РОБОТОТЕХНИКА EV3
Тема: Инженерные решения.
Рис.1
1. ПРИВЕТСТВЕННОЕ СЛОВО ПРЕПОДАВАТЕЛЯ
2. ПОВТОРЕНИЕ
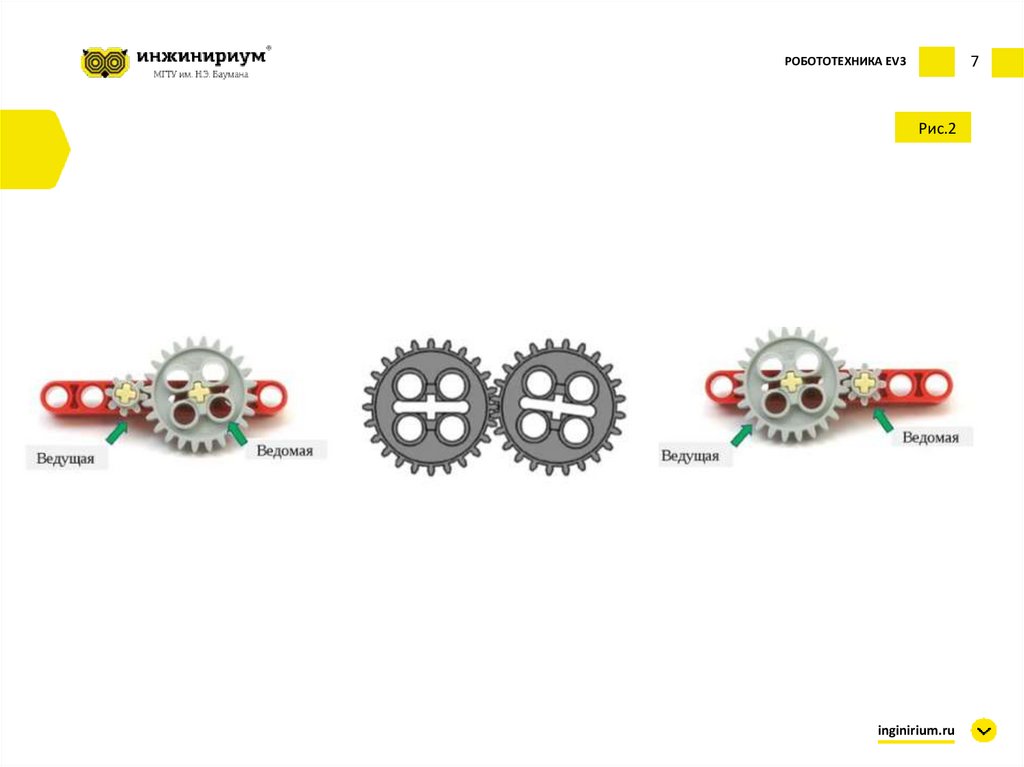
Зубча́тая переда́ча — это механизм или часть механизма
механической передачи, в состав которого
входят зубчатые колёса
inginirium.ru
6.
6РОБОТОТЕХНИКА EV3
Рис.1а
inginirium.ru
7.
7РОБОТОТЕХНИКА EV3
Рис.2
inginirium.ru
8.
8РОБОТОТЕХНИКА EV3
Рис.3
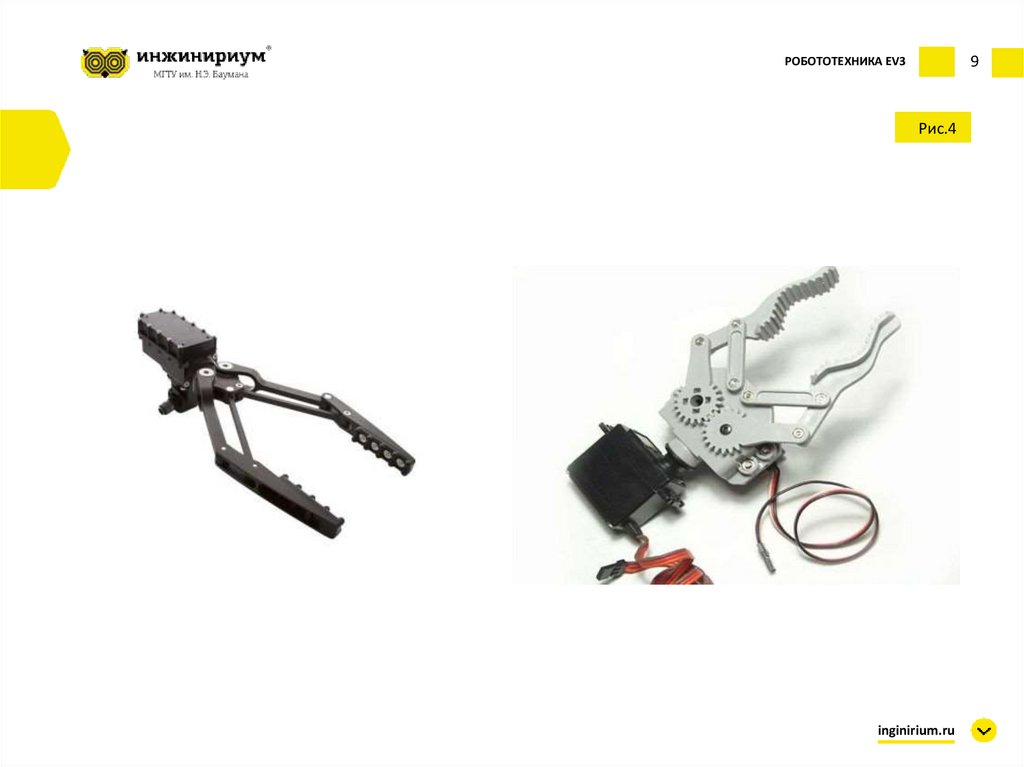
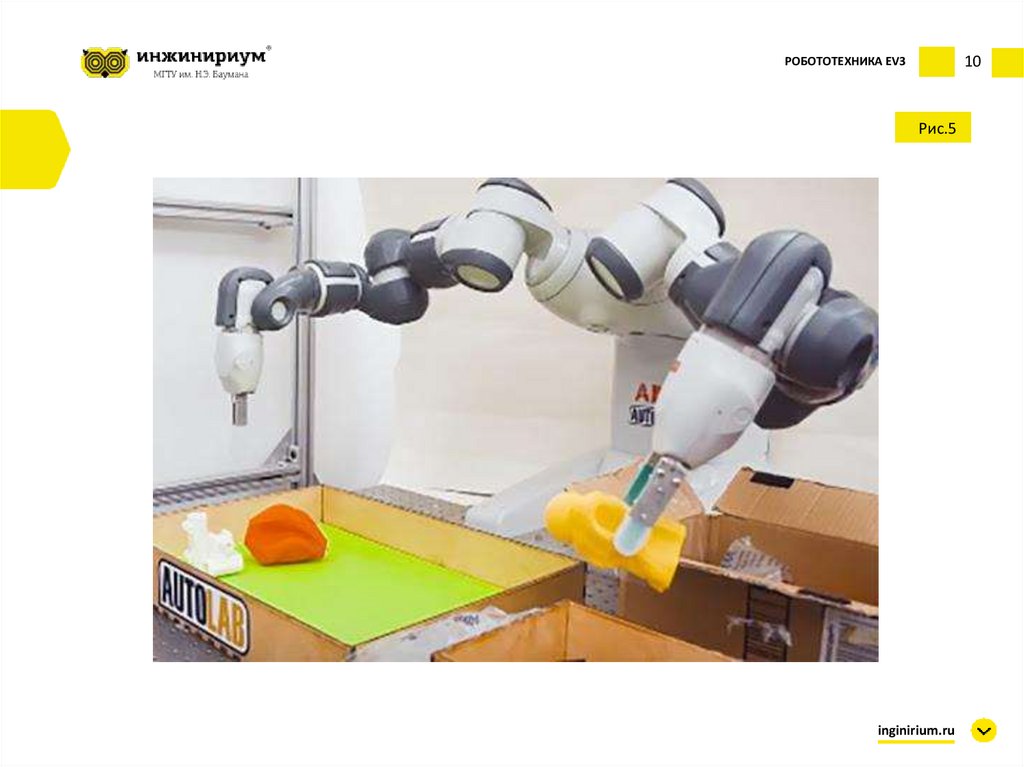
Захватные устройства (ЗУ) предназначены для захвата и
удержания объектов манипулирования.
inginirium.ru
9.
9РОБОТОТЕХНИКА EV3
Рис.4
inginirium.ru
10.
10РОБОТОТЕХНИКА EV3
Рис.5
inginirium.ru
11.
РОБОТОТЕХНИКА EV3Конструирование
inginirium.ru
11
12.
12РОБОТОТЕХНИКА EV3
Рис.6
inginirium.ru
13.
13РОБОТОТЕХНИКА EV3
Рис.7
inginirium.ru
14.
14РОБОТОТЕХНИКА EV3
Рис.8
inginirium.ru
15.
15РОБОТОТЕХНИКА EV3
Рис.9
inginirium.ru
16.
16РОБОТОТЕХНИКА EV3
Рис.10
inginirium.ru
17.
17РОБОТОТЕХНИКА EV3
Рис.11
inginirium.ru
18.
18РОБОТОТЕХНИКА EV3
Рис.12
inginirium.ru
19.
19РОБОТОТЕХНИКА EV3
Рис.13
inginirium.ru
20.
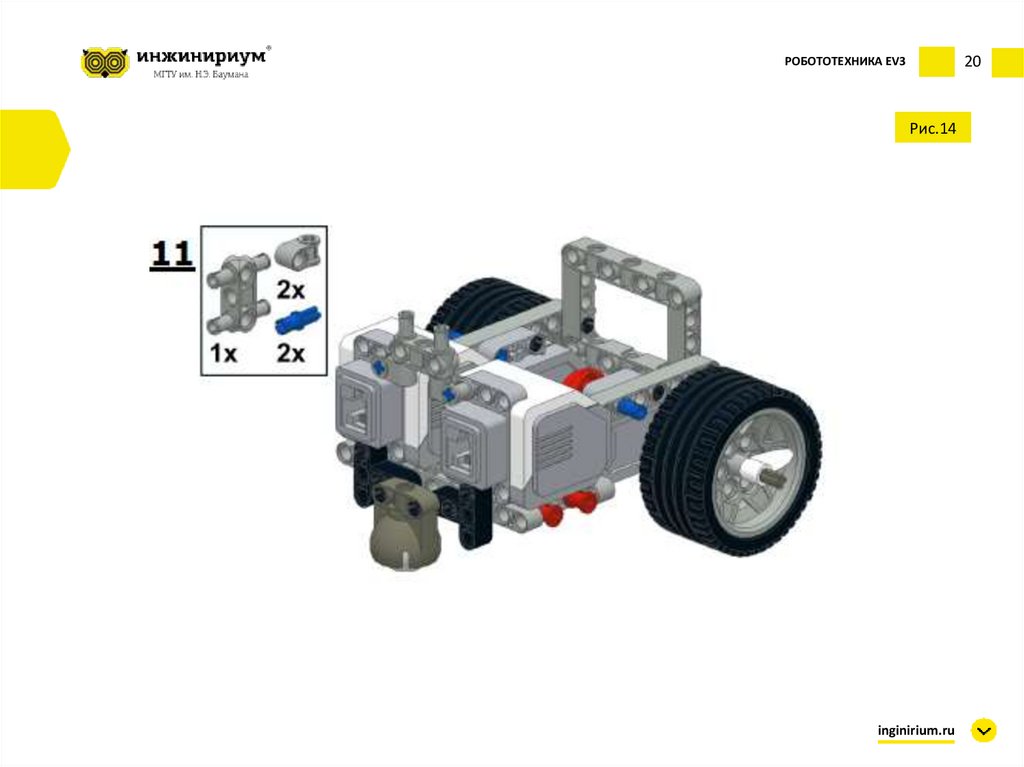
20РОБОТОТЕХНИКА EV3
Рис.14
inginirium.ru
21.
21РОБОТОТЕХНИКА EV3
Рис.15
inginirium.ru
22.
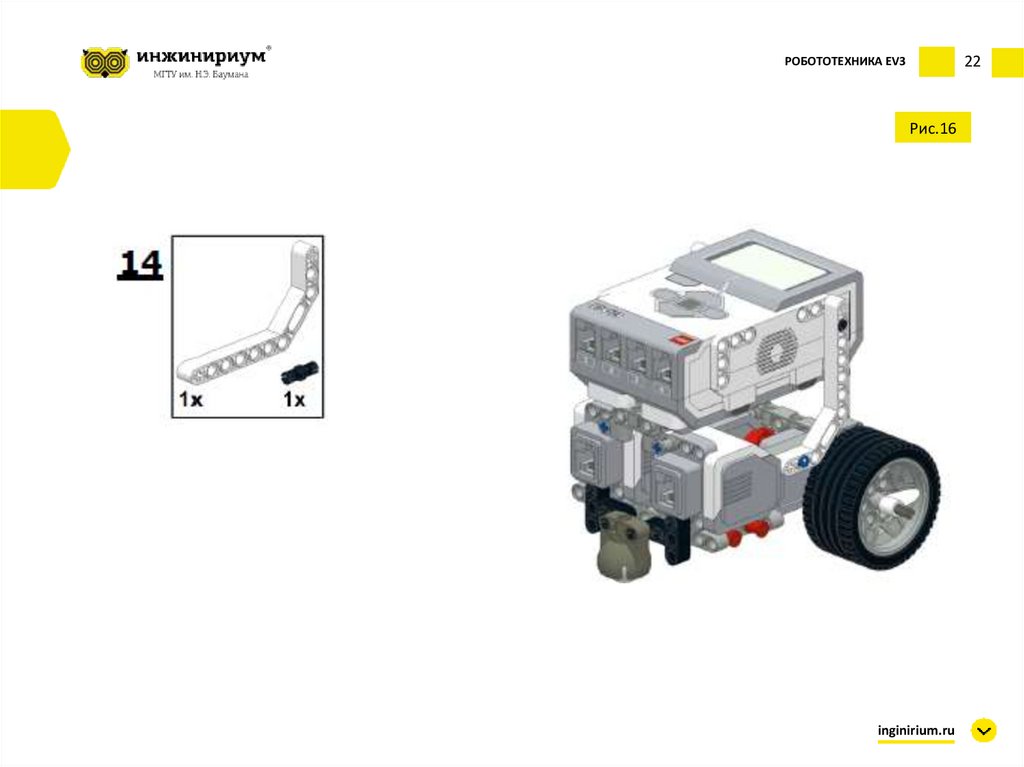
22РОБОТОТЕХНИКА EV3
Рис.16
inginirium.ru
23.
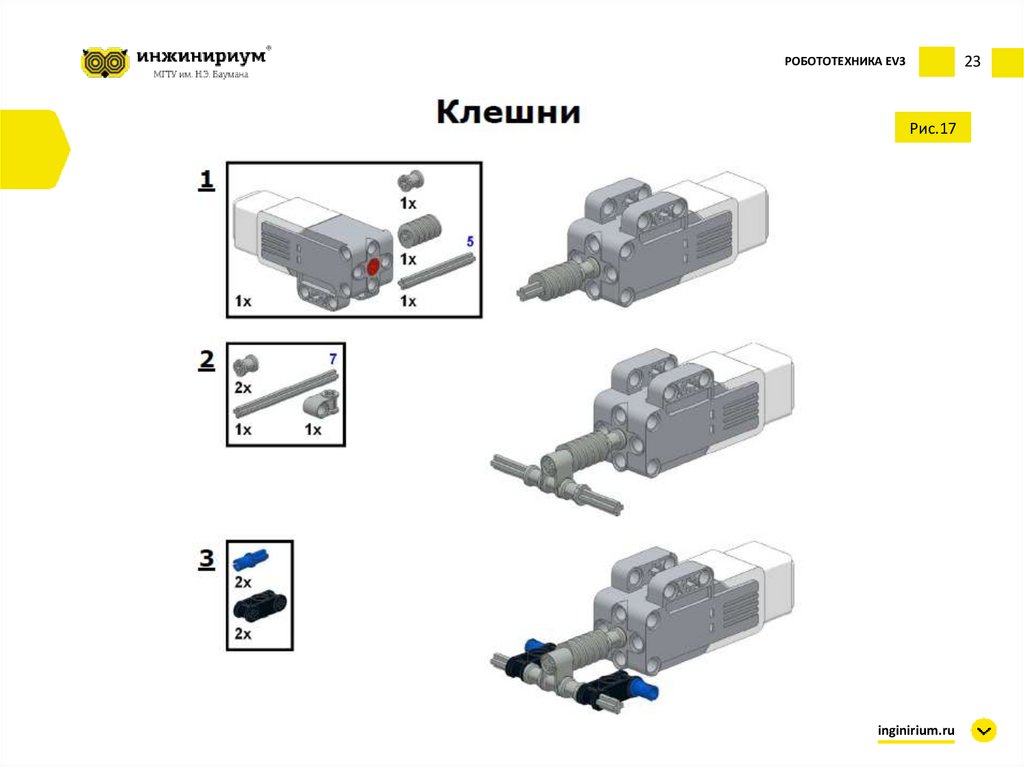
23РОБОТОТЕХНИКА EV3
Рис.17
inginirium.ru
24.
24РОБОТОТЕХНИКА EV3
Рис.18
inginirium.ru
25.
25РОБОТОТЕХНИКА EV3
Рис.19
inginirium.ru
26.
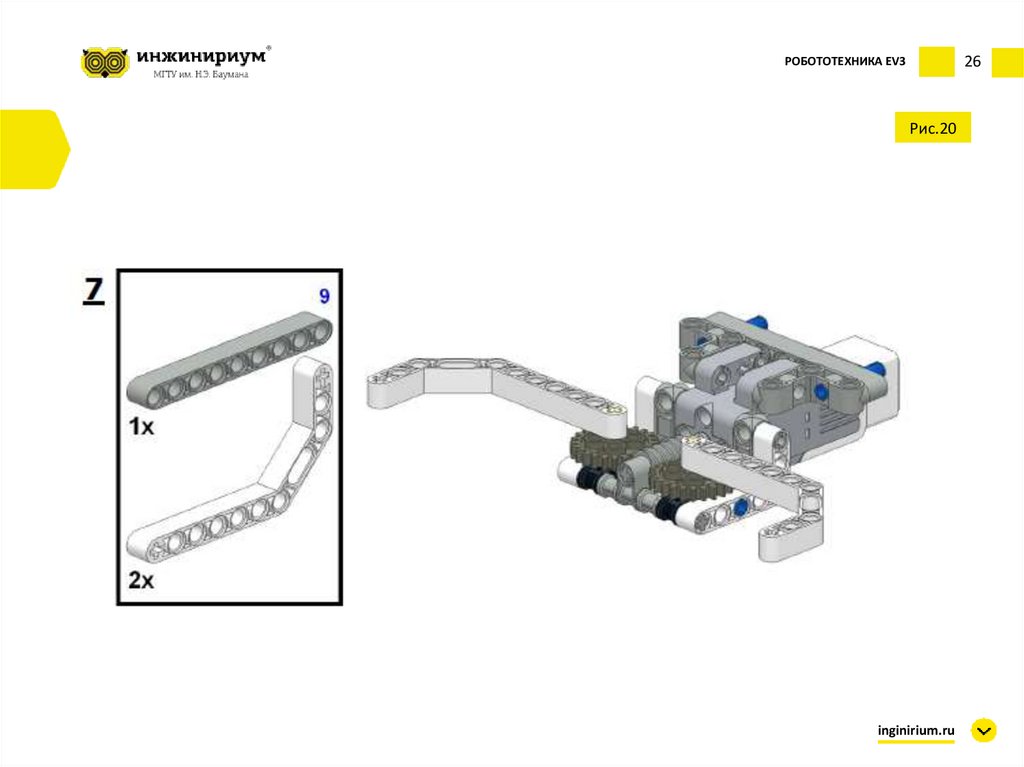
26РОБОТОТЕХНИКА EV3
Рис.20
inginirium.ru
27.
27РОБОТОТЕХНИКА EV3
Рис.21
inginirium.ru
28.
28РОБОТОТЕХНИКА EV3
Какая это передача?
Рис.21а
inginirium.ru
29.
29РОБОТОТЕХНИКА EV3
Рис.22
Самостоятельно запрограммируем схват, подберем оптимальную
скорость
inginirium.ru
30.
РОБОТОТЕХНИКА EV330
Рис.22а
Задача: перенести пустой пластиковый стаканчик из точки А в точку В
inginirium.ru
31.
31РОБОТОТЕХНИКА EV3
Рис.23
Усложним задачу: перенести пустой пластиковый стаканчик из точки
А в точку В, используя кнопку, по которой схват будет открываться и
закрываться
inginirium.ru
32.
32РОБОТОТЕХНИКА EV3
Сдаём наборы
Рис.24
inginirium.ru