
























 mechanics
mechanicsSimilar presentations:










Основные характеристики и законы регулирования
1. Основные характеристики и законы регулирования
2.
Основныехарактеристики
регулирования
регуляторов:
1. Зона регулирования (статизм) – разность
между величинами регулируемого давления
при 10 и 90% максимального расхода.
pmax pmin
100%.
px0
где
pmax
–
давление
обеспечиваемое
регулятором, при 0,9Gmax ;
pmin – давление обеспечиваемое регулятором,
при 0,1Gmax ;
px0 – заданное давление, px0 ≈ 0,5(pmax + pmin)
3.
2. Зона нечувствительности – наибольшаяразность значений регулируемого параметра,
необходимая
для
движения
(изменения
направления
движения)
чувствительного
элемента
px0 px min
px0
100%
Fòð
Fï ð
100%.
4.
3. Максимальная пропускная способность (kvmax, kvs) –расход среды с плотностью 1000 кг/м3, протекающей
через полностью открытый регулятор при перепаде
давления на нем 1 кгс/см2 (1 бар).
Gv2
2
p ks
ks
.
2
2
2S
2 p
p
Gv S
kv
.
ks
Gv
2
kv S
.
ks
p /
kv f S , ks f hз .
5.
4. Пропускная (расходная) характеристика –зависимость k / k max f h / hmax .
kv
v
v
1 – линейная kv = h,
2 – логарифмическая
kv = kv0 (1 h)
3 – параболическая
kv = h2,
4 – логарифмическолинейная,
5 – линейно-линейная.
6.
Типпропускной
характеристики
определяется формой затвора, который может
быть сплошным тарельчатым и конусным,
также цилиндрическим с прорезями и
отверстиями.
7.
8.
5. Диапазон регулирования – отношениемаксимальной
пропускной
способности
регулятора к ее минимальной пропускной
способности, при которой сохраняется вид
пропускной характеристики
D
k vmax
k vmin
.
9.
Оптимальный вид пропускной характеристикиДля обеспечения качественного регулирования следует
обеспечить адекватную реакцию регулирующего
клапана на изменение регулируемого параметра.
1,0
x=X/Xном
0,8
0,6
0,4
0,2
0,0
0,0
0,2
0,4
0,6
0,8
h 1,0
10. Регулирование давления.
p1=constpх
kv
kc
p2=const
p1 px Gv2
kv2 .
px p2 Gv2 kc2 .
2
p1 p1 Gv2 kvs
.
px p2
kv2
2kv
p
2
2
p1 p2 kv2 kc2 1 kv2 / kvs
2kv kc2 / kvs
1 2kv
11.
p 1,03
2
0,5
kс/kvs=
1
0,0
0,0
0,2
0,4
0,6
1-1
2 - 0,5
3 -0,2
0,8
h 1,0
px p2
2h
p
p1 p2 2 k 2 / k 2 1 2
h
c
vs
h
12.
p1,0
3
0,5
2
kс/kvs=
1-1
2 - 0,5
3 -0,2
1
0,0
0,0
0,2
0,4
0,6
0,8
h 1,0
2 1 h
kv 0
px p2
p
p1 p2 2 1 h k 2 / k 2 1 2 1 h
c
vs
kv 0
kv 0
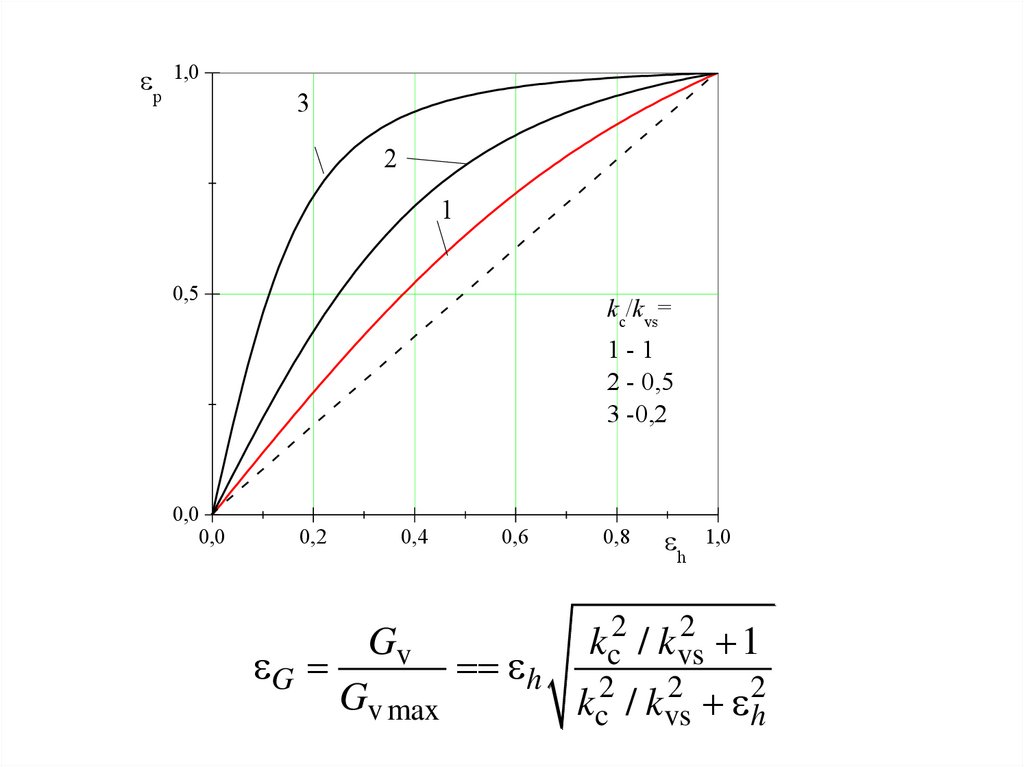
13. Регулирование расхода.
p1=constpх
kv
kc
p2=const
p1 p2 Gv2 kv2 Gv2 kc2 .
G
Gv
Gv max
kv
2
kc2 / kvs
1
2
kc2 / kvs
k2v
14.
p 1,03
2
1
0,5
kс/kvs=
1-1
2 - 0,5
3 -0,2
0,0
0,0
0,2
G
0,4
Gv
Gv max
0,6
h
0,8
h 1,0
2
kc2 / kvs
1
2
kc2 / kvs
2h
15.
p 1,03
0,5
kс/kvs=
2
1-1
2 - 0,5
3 -0,2
1
0,0
0,0
0,2
0,4
0,6
0,8
h 1,0
2
2
Gv
k
/
k
1
1 h
c
vs
G
kv0
2 1 h
2
2
Gv max
kc / kvs kv0
16.
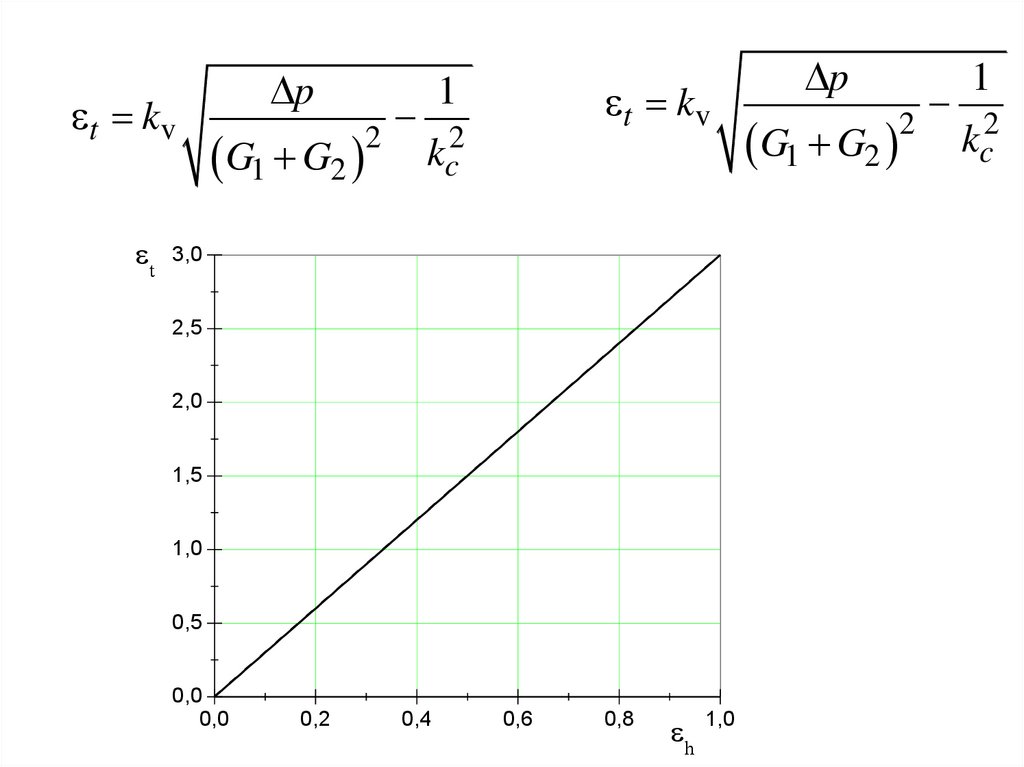
Регулирование температуры.TTR
t1=const
tх
G1
G2
t2=const
G1c1t1 G2c2t2 G1 G2 ct x
t x t2
G1
t
t1 t2 G1 G2
2
p G1
2
2
kv G1 G2
2
kc .
17.
t k vp
G1 G2
2
t k v
1
kc2
t 3,0
2,5
2,0
1,5
1,0
0,5
0,0
0,0
0,2
0,4
0,6
0,8
h
1,0
p
G1 G2
2
1
kc2
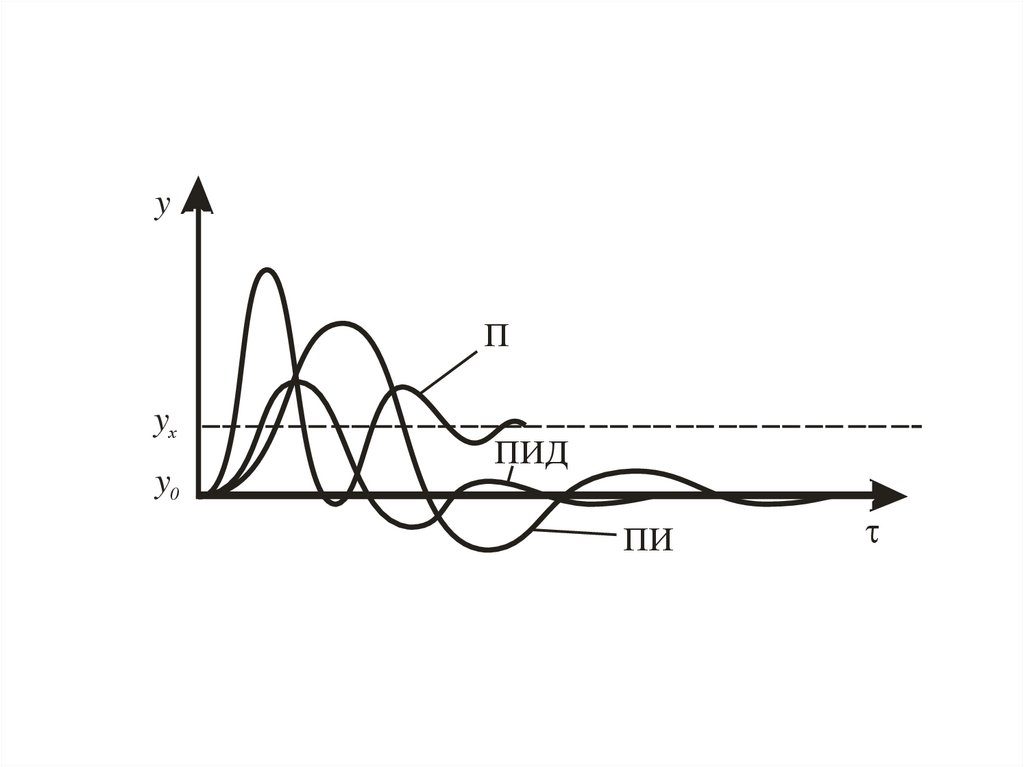
18.
Качестворегулирования
оценивается
отклонением реального переходного процесса от
заданного и показывает как быстро и точно в системе
устанавливается новое равновесное состояние при
ступенчатом возмущении.
y
yх
y0
ymax
yх
tр
+
-
t
19.
Основные показатели качества регулирования:• динамическая ошибка ymax максимальное
динамическое отклонение регулируемого
параметра,
• точность регулирования (статическая ошибка)
yx разность между установившимся
значением
и
заданным
значением
регулируемого параметра,
• время регулирования tр – время от начала
возмущения до стабилизации регулировочного
параметра с заданной точностью .
20.
Функциональная связь между выходной величинойрегулятора (изменение положения затвора) и его
входной
величиной
(регулируемого
параметра,
например, температуры) называется
законом
регулирования, который имеет следующие основные
типы:
• позиционный (Пз - регулятор),
• пропорциональный (П - регулятор),
• интегральный (И - регулятор),
• пропорционально-интегральный (ПИ - регулятор),
• пропорционально-дифференциальный
(ПД
регулятор),
• пропорционально-интегрально-дифференциальный
(ПИД - регулятор).
21.
Позиционный регулятор это регулятор, укоторых регулирующий элемент занимает
ограниченное число положений.
Достоинством Пз–регулятора является простота и
надежность.
Недостаток колебания регулируемой величины.
22.
.Позиционный регулятор это регулятор, у
которых регулирующий элемент занимает
ограниченное число положений.
Пропорциональный регулятор это регулятор, у
которых отклонение регулируемой величины от
заданного значения вызывает перемещение
регулирующего элемента на ход,
пропорциональный величине этого отклонения.
Δh = kp Δy
dh
dy
h
kp
k p y
dt
dt
23.
Для пружинного регулятора давления kp = Sч.э /с24.
Достоинства пропорциональных регуляторов:• быстродействие (малое время регулирования).
Недостатки:
• имеет статическую ошибку .
25.
У интегрального регулятора регулирующеевоздействие пропорционально интегралу
отклонения регулирующей величины по времени,
т.е. скорость регулирующего органа
прямопропорциональна отклонению регулирующего
параметра.
h = k y
В интегральном регуляторе одному и тому же значению
регулируемой величины могут соответствовать
различные положения регулирующего элемента.
Преимуществом И- регуляторов является отсутствие
статической ошибки, недостатком – большое время
регулирования .
26.
Пропорционально-интегральный (изодромный)регулятор
это
регулятор,
у
которых
регулирующее воздействие пропорционально
сумме отклонения регулирующей величины и
интеграла от нее
h = k y + kp y.
ПИ-регуляторы обеспечивают поддержание
регулируемого параметра на заданном уровне без
остаточного отклонения.
При быстрых и частых изменениях регулируемого
параметра ПИ-регулятор приводит к большим
динамическим ошибкам.
27.
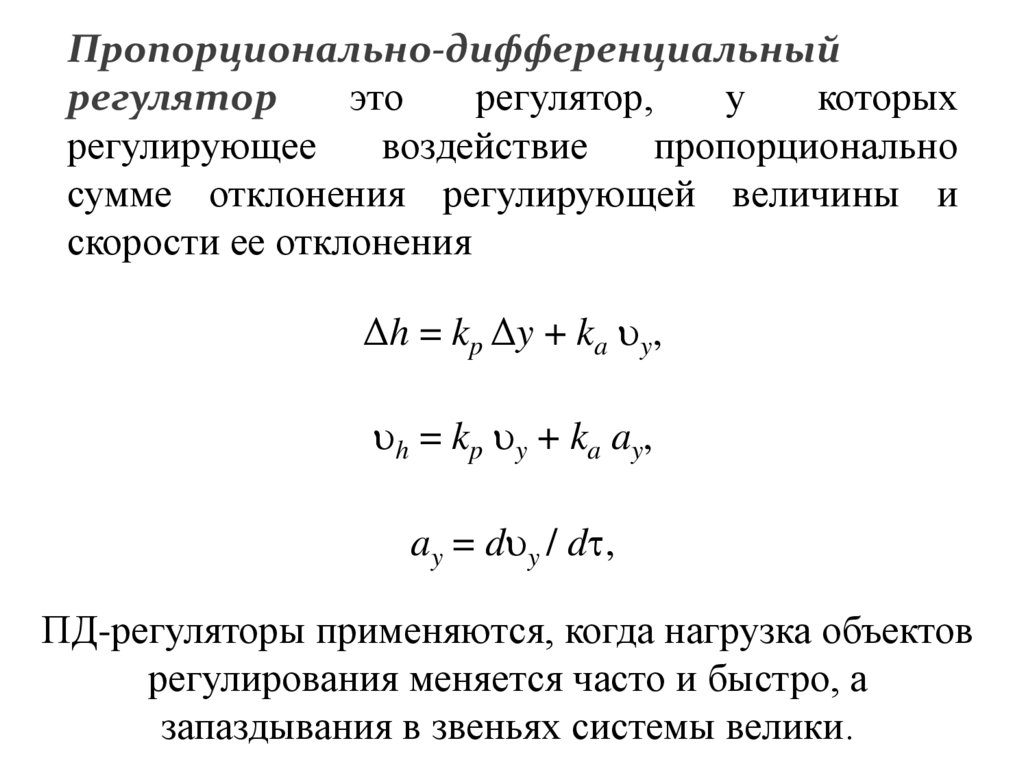
Пропорционально-дифференциальныйрегулятор
это
регулятор,
у
которых
регулирующее
воздействие
пропорционально
сумме отклонения регулирующей величины и
скорости ее отклонения
Δh = kp Δy + ka y,
h = kp y + ka ay,
ay = d y / dt,
ПД-регуляторы применяются, когда нагрузка объектов
регулирования меняется часто и быстро, а
запаздывания в звеньях системы велики.
28.
Пропорционально-интегральнодифференциальный регулятор это регулятор, укоторых
регулирующее
воздействие
пропорционально сумме отклонения регулирующей
величины, интеграла от нее и скорости ее
отклонения
h = kp y + k y + ka ay.
ПИД-регуляторы объединяют в себе все преимущества
представленных выше регуляторов.
29.
yП
yх
y0
ПИД
ПИ
t