


















 electronics
electronics industry
industrySimilar presentations:






")



Станки с числовым программным управлением. Лекция 2: Конструкция станков с ЧПУ
1.
Станки с числовымпрограммным управлением
ЛЕКЦИЯ 2: КОНСТРУКЦИЯ СТАНКОВ С ЧПУ
2.
Привод станка3.
Привод станка – это совокупность устройств,передающих движение от источника движения к
рабочим органам станка.
В привод входят:
двигатель,
2. механизм изменения передаточного
отношения,
3. механизмы включения, выключения и
реверсирования движения.
1.
4.
В станках применяют приводы:вращательного,
2. прямолинейного,
3. периодического движений.
1.
По способу изменения скорости движения
рабочих органов приводы подразделяют на:
1. Ступенчатые,
2. Бесступенчатые.
5.
В зависимости от того посредством чего(рабочего тела) осуществляется передача и
преобразование движения различают следующие
типы приводов:
1. Электропривод
2. Механический привод
3. Гидропривод
4. Пневмопривод
5. Комбинированный привод
6.
Электропривод7.
Электродвигатель представляет электромашину,перестраивающую электрическую энергию в
механическую.
Обычно электрическая машина реализует
механическую работу благодаря потреблению
приложенной к ней электроэнергии,
преобразовывающейся во вращательное
движение.
8.
Работа электродвигателя базируется напринципах электромагнитной индукции.
Магнитная и электрическая энергия создают
электродвижущую силу в замкнутом контуре,
проводящем ток. Это свойство заложено в работу
любой электромашины.
9.
Электродвигатели постоянного токаЭД постоянного
тока
С
электромагнитами
С постоянными
магнитами
10.
Электродвигатели постоянного токаЭД постоянного
тока
Коллекторные
Безколлекторные
(вентильные)
11.
Электродвигатели постоянного токаВ коллекторных электродвигателях
присутствует щёточно-коллекторный узел,
обеспечивающий электрическое соединение
неподвижной и вращающейся части двигателя.
Устройства бывают с самовозбуждением и
независимым возбуждением от постоянных
магнитов и электромагнитов.
12.
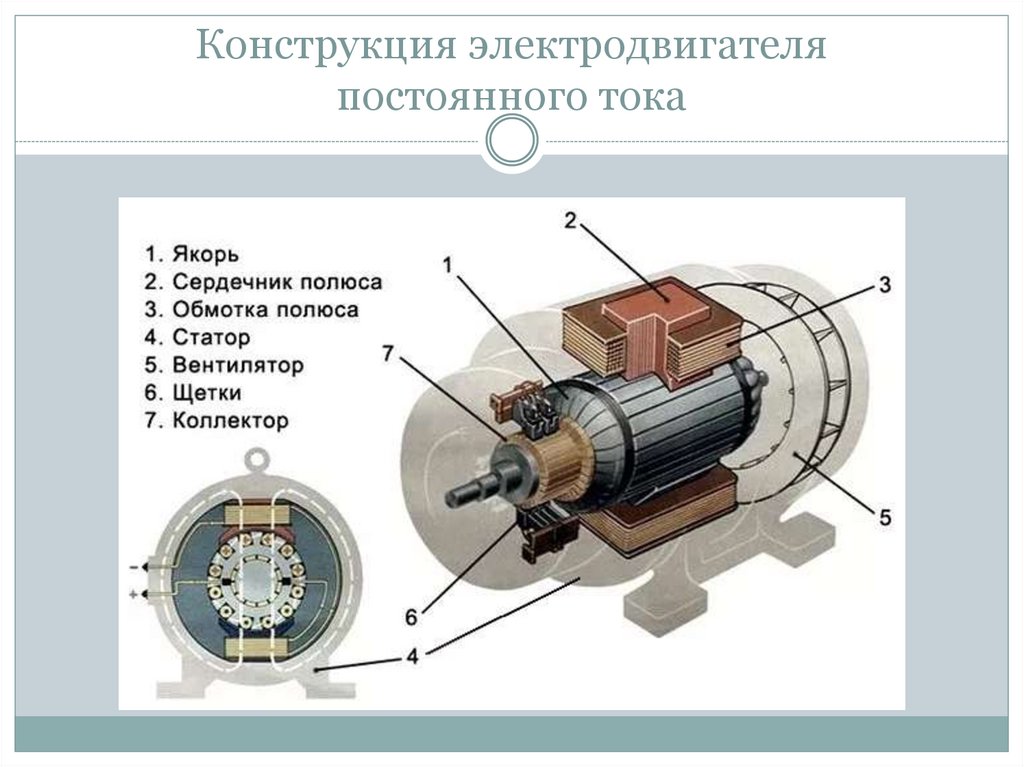
Конструкция электродвигателяпостоянного тока
13.
Электродвигатели постоянного токаБезколлекторные (вентильные) – это двигатели с
замкнутой системой, работающие по
аналогичному принципу работы синхронных
устройств.
Оснащены датчиком положения ротора,
преобразователем координат, а также
инвертором силовым полупроводниковым
преобразователем.
14.
Шаговый двигатель может быть рассмотрен какдвигатель постоянного тока без коллекторного
узла.
Обмотки шагового двигателя являются частью
статора. На роторе расположен постоянный
магнит или, для случаев с переменным
магнитным сопротивлением, зубчатый блок из
магнитомягкого материала.
Все коммутации производятся внешними
схемами.
15.
Шаговые двигатели делятся на дверазновидности:
1. с постоянными магнитами,
2. с переменным магнитным сопротивлением
(гибридные).
16.
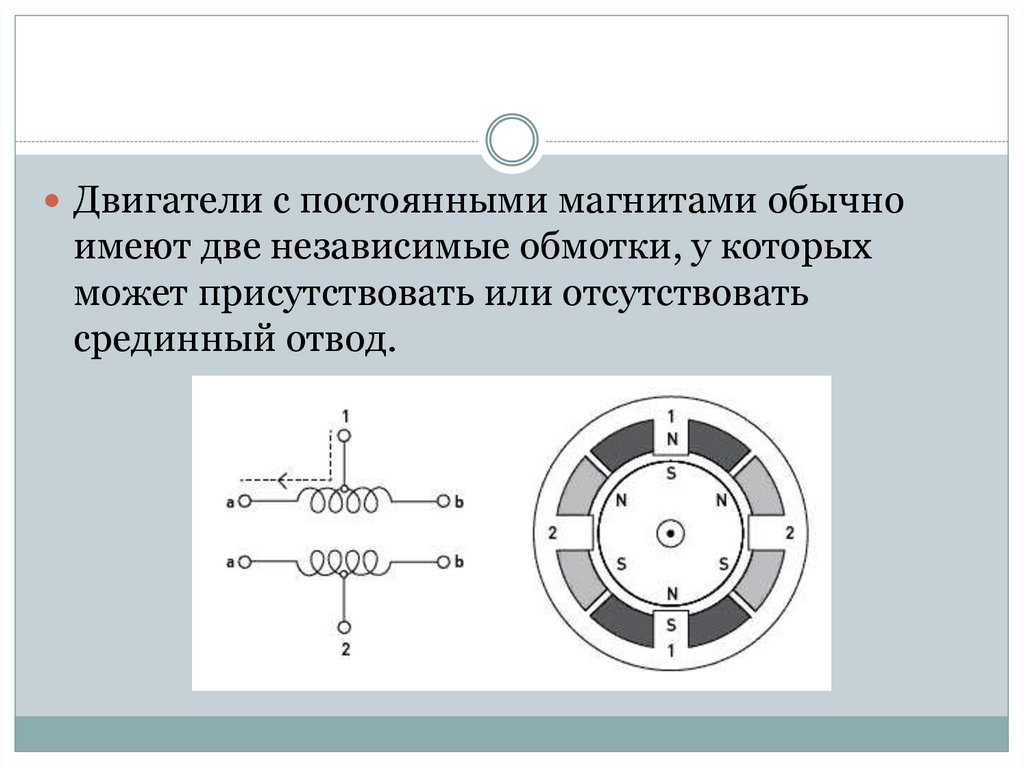
Двигатели с постоянными магнитами обычноимеют две независимые обмотки, у которых
может присутствовать или отсутствовать
срединный отвод.
17.
Биполярные шаговые двигатели с постояннымимагнитами и гибридные двигатели
сконструированы более просто, чем
униполярные, обмотки в них не имеют
центрального отвода.
За это упрощение приходится платить более сложным реверсированием
полярности каждой пары полюсов мотора.
18.
Шаговые двигатели имеют широкий диапазонугловых разрешений.
Более грубые моторы обычно вращаются на 90° за
шаг, в то время как прецизионные двигатели могут
иметь разрешение 1,8° или 0,72° на шаг.
Если контроллер позволяет, то возможно
использование полушагового режима или режима с
более мелким дроблением шага (микрошаговый
режим), при этом на обмотки подаются дробные
значения напряжений, зачастую формируемые при
помощи широтно-импульсной модуляции.
19.
Если в процессе управления используетсявозбуждение только одной обмотки в любой
момент времени, то ротор будет поворачиваться
на фиксированный угол, который будет
удерживаться пока внешний момент не превысит
момента удержания двигателя в точке
равновесия.
20.
Для правильного управления биполярнымшаговым двигателем необходима электрическая
схема, которая должна выполнять функции
старта, остановки, реверса и изменения скорости.
Шаговый двигатель транслирует
последовательность цифровых переключений в
движение.
«Вращающееся» магнитное поле обеспечивается
соответствующими переключениями
напряжений на обмотках. Вслед за этим полем
будет вращаться ротор двигателя.
21.
Существует несколько способов управления:волновое,
2. полношаговое,
3. полушаговое.
1.
22.
Простейшим способом управления шаговымдвигателем является волновое управление.
При таком управлении в один момент времени
возбуждается только одна обмотка. Но такой
способ управления не обеспечивает максимально
возможного момента.
23.
Полношаговое управление обеспечиваетбольший момент, чем волновое управление так
как обе обмотки двигателя включены
одновременно.
24.
Полушаговое управление – комбинацияволнового управления и полношагового
управления с питанием по очереди: сначала
одной обмотки, затем с питанием обоих обмоток.
При таком управлении количество шагов
увеличивается в двое по сравнению с другими
методами управления.
25.
Последовательностьуправления для режима с
единичным шагом
Последовательность
управления для
полушагового управления
26.
Максимальная скорость движения определяетсяисходя из физических возможностей шагового
двигателя.
При этом скорость регулируется путем
изменения размера шага.
Более крупные шаги соответствуют большей
скорости движения.