


 informatics
informatics software
softwareSimilar presentations:




Odwzorowania przestrzeni trójwymiarowej
1.
Odwzorowania przestrzenitrójwymiarowej
Sposoby reprezentacji obiektów w przestrzeni 3D
Matematyczny zapis obiektów w przestrzeni 3D
Projekt ,,KPK II – Zintegrowany Program Kształcenia w PWSIiP w Łomży etap II” nr POWR.03.05.00.00-Z053/18
współfinansowany ze środków Europejskiego Funduszu Społecznego w ramach Programu Operacyjnego Wiedza Edukacja Rozwój 2014 – 2020.
2.
Sposoby reprezentacji obiektów w przestrzeni 3DGrafikę komputerową ze względu na sposób odwzorowania przestrzenia można podzielić na:
-grafikę dwuwymiarową (2D)
-grafikę trójwymiarową (3D)
Można wyróżnić dwie podstawowe metody reprezentacji obiektów w przestrzeni 3D:
-modelowanie powierzchni bocznej,
-modelowanie brył składowych.
Modelowanie brzegowe (ang. b-rep) można podzielić na:
-chmura punktów,
-siatki wielokątowe,
-kwadryki,
-powierzchnie NURBS.
Modelowanie brył składowych można podzielić na:
-dekompozycja na komórki,
-wokselowa,
-drzewa ósemkowe,
-drzewa BSP (binarnego podziału przestrzeni).
3.
Sposoby reprezentacji obiektów w przestrzeni 3DChmura punktów to niestrukturalny zbiór punktów reprezentujących powierzchnię
obiektu o współrzędnych (x,y,z) otrzymanych z systemów akwizycji 3D (np. skaner 3D).
Przykład inwentaryzacji architektonicznej Bazyliki Archikatedralnej w Łodzi chmurą punktów
www.xscan.pl
4.
Sposoby reprezentacji obiektów w przestrzeni 3DSiatka wielokątów (mesh) to zbiór wierzchołków (vertex / vertices), krawędzi (edge) i
wielokątów (polygon, face) tak połączonych, że:
- każda krawędź jest wspólna przynajmniej dla dwóch wielokątów,
- krawędź łączy dwa wierzchołki,
- wielokąt jest zamkniętą sekwencją krawędzi,
- wierzchołek jest wspólny dla przynajmniej dwóch krawędzi,
- każda krawędź jest częścią jakiegoś wielokąta.
Obiekt budowany jest z płaskich wielokątów (najczęściej trójkątów lub czworokątów),
które mają wspólne wierzchołki i krawędzie.
W ten sposób można tworzyć proste bryły, albo – jeśli siatka jest dostatecznie gęsta –
dobrze przybliżać skomplikowane obiekty.
5.
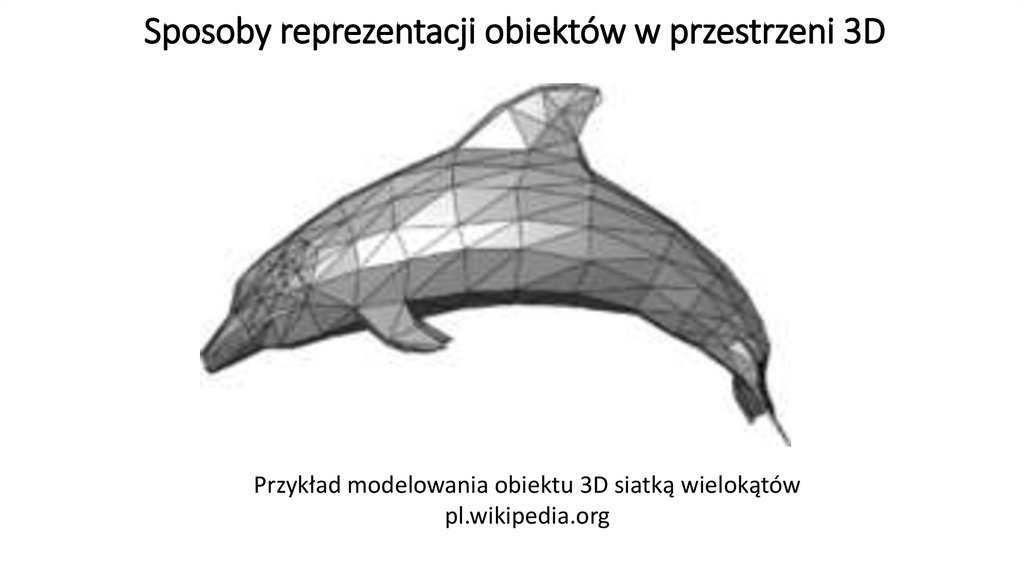
Sposoby reprezentacji obiektów w przestrzeni 3DPrzykład modelowania obiektu 3D siatką wielokątów
pl.wikipedia.org
6.
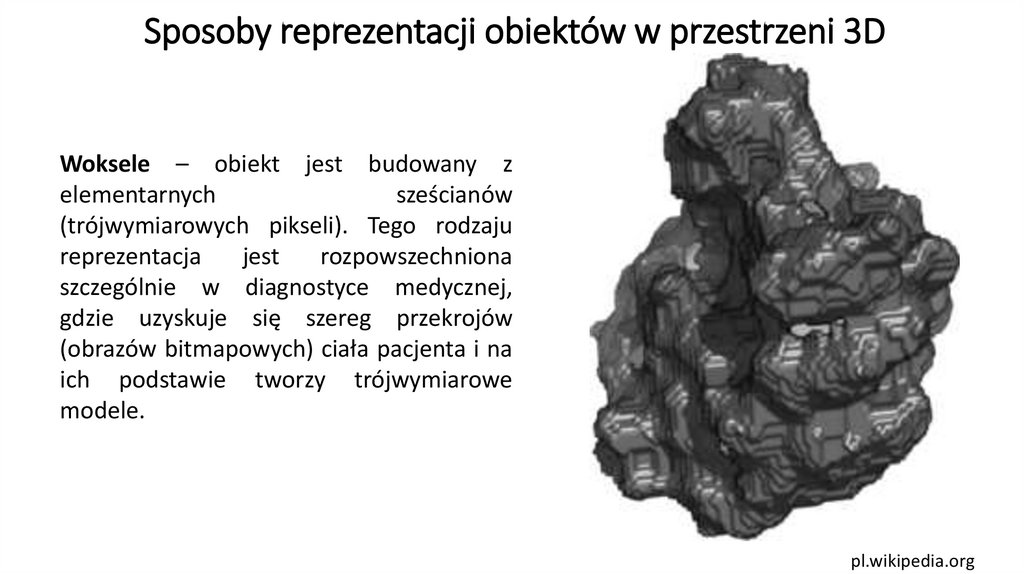
Sposoby reprezentacji obiektów w przestrzeni 3DWoksele – obiekt jest budowany z
elementarnych
sześcianów
(trójwymiarowych pikseli). Tego rodzaju
reprezentacja
jest
rozpowszechniona
szczególnie w diagnostyce medycznej,
gdzie uzyskuje się szereg przekrojów
(obrazów bitmapowych) ciała pacjenta i na
ich podstawie tworzy trójwymiarowe
modele.
pl.wikipedia.org
7.
Sposoby reprezentacji obiektów w przestrzeni 3DOpis matematyczny – obiekty są
określone równaniami.
Mogą to być kule, płaszczyzny oraz
szczególnie użyteczne i powszechnie
stosowane powierzchnie
parametryczne (płaty powierzchni), na
przykład płaty Béziera, Hermite'a, czy
NURBS. Istnieją programy, które swoje
funkcjonowanie opierają głównie o
właśnie taki sposób modelowania;
zaliczyć do nich można POV-Ray.
pl.wikipedia.org
8.
Sposoby reprezentacji obiektów w przestrzeni 3DModelowanie szkieletowe jest metodą tworzenia modeli ludzi oraz zwierząt kręgowych.
Obiekt składa się z dwóch części:
skora (skin) - powierzchnia określająca wygląd obiektu;
szkielet (skeleton) składa się z układu kości (bones), połączonych w strukturę hierarchiczną
służącą do określenia ruchu obiektu.
Metoda daje dość realistyczny model i animację.
Problemy powstają np. przy próbie realistycznego oddania ruchów mięśni.
Łączenie hierarchiczne używane jest w animacji postaci do powiązania ze sobą
poszczególnych segmentów postaci lub kości szkieletu.
Hierarchia pozwala określić zależności pomiędzy „rodzicem” a „potomkiem”.
animowanie sekwencyjne (forward kinematics) – poruszając obiektem rodzicem porusza
się również jego obiektami potomnymi;
odwrotna kinematyka (inverse kinematics) – przemieszczające się obiekty potomne
powodują ruch obiektów będących ich rodzicami.
9.
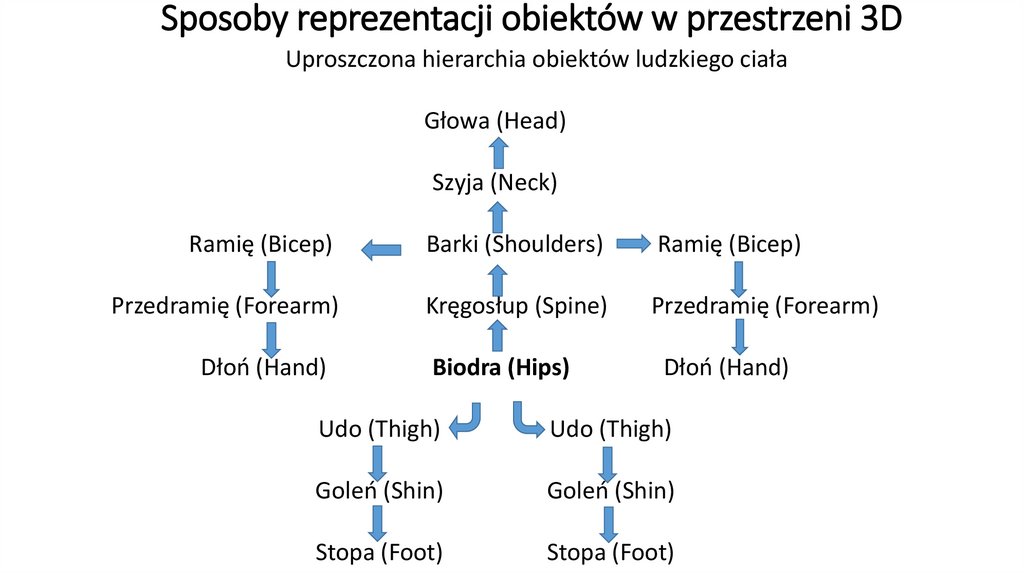
Sposoby reprezentacji obiektów w przestrzeni 3DUproszczona hierarchia obiektów ludzkiego ciała
Głowa (Head)
Szyja (Neck)
Ramię (Bicep)
Barki (Shoulders)
Ramię (Bicep)
Przedramię (Forearm)
Kręgosłup (Spine)
Przedramię (Forearm)
Biodra (Hips)
Dłoń (Hand)
Dłoń (Hand)
Udo (Thigh)
Udo (Thigh)
Goleń (Shin)
Goleń (Shin)
Stopa (Foot)
Stopa (Foot)
10.
Sposoby reprezentacji obiektów w przestrzeni 3DSiatka i system kości
Siatka i system kości nałożone na siebie pokazane osobno
11.
Sposoby reprezentacji obiektów w przestrzeni 3DNURBS opiera się na opisie powierzchni za pomocą parametrycznych krzywych NURBS.
- punkty kontrolne zwykle leżą poza powierzchnią;
- zmieniając ich położenie modyfikujemy kształt powierzchni;
- cztery punkty kontrolne wyznaczają płat powierzchni;
- płaty tworzą ciągłą powierzchnię.
NURBS daje znacznie bardziej dokładny i gładki opis kształtu obiektu.
Jest więc stosowany tam, gdzie precyzja jest ważniejsza niż szybkość, głównie w
projektowaniu komputerowym CAD.
Rendering wymaga matematycznego obliczania kształtu powierzchni – czasochłonne i
wymagające silnego sprzętu.
Nie nadaje się więc np. do gier.
12.
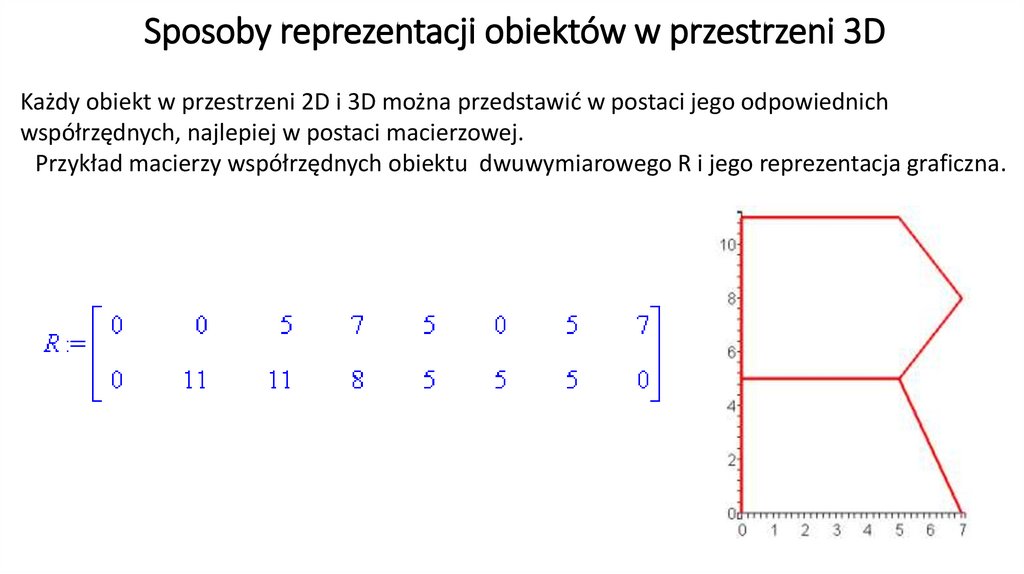
Sposoby reprezentacji obiektów w przestrzeni 3DKażdy obiekt w przestrzeni 2D i 3D można przedstawić w postaci jego odpowiednich
współrzędnych, najlepiej w postaci macierzowej.
Przykład macierzy współrzędnych obiektu dwuwymiarowego R i jego reprezentacja graficzna.
13.
Sposoby reprezentacji obiektów w przestrzeni 3D4
10
0
x
2
2
5
4
6
0
y
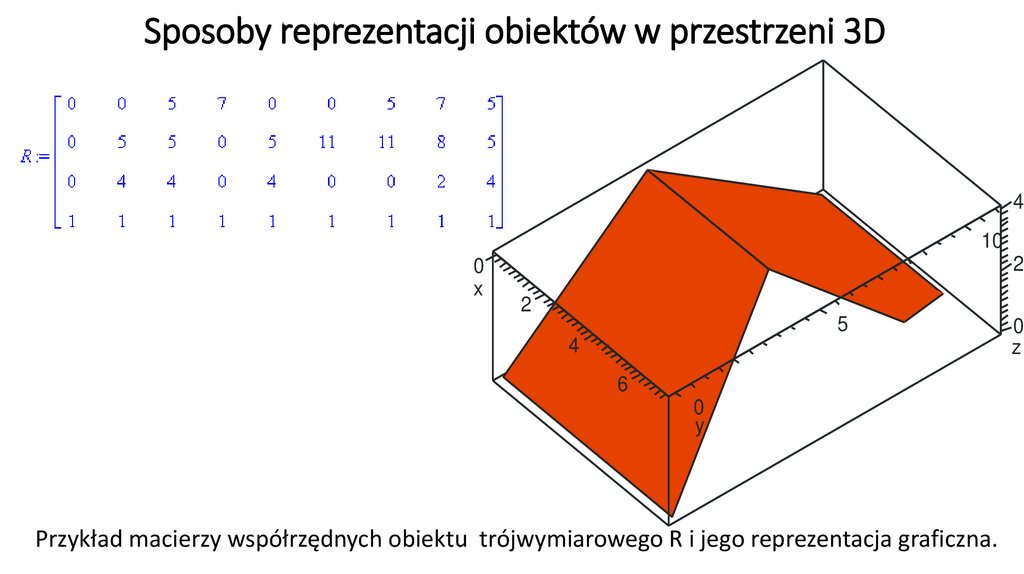
Przykład macierzy współrzędnych obiektu trójwymiarowego R i jego reprezentacja graficzna.
0
z
14.
Dziękuję za uwagę!Projekt ,,KPK II – Zintegrowany Program Kształcenia w PWSIiP w Łomży etap II” nr POWR.03.05.00.00-Z053/18
współfinansowany ze środków Europejskiego Funduszu Społecznego w ramach Programu Operacyjnego Wiedza Edukacja Rozwój 2014 – 2020.