

















 physics
physicsSimilar presentations:

")


")





Физика в опорных конспектах. 9 класс
1.
v v atm1 m2
FT G
r2
A=F*s*cosα
Электронная обработка Ляпиной И.Г.,
учителя физики и информатики
Пановской средней школы
Палехского района Ивановской области
F = m*a
2.
1. ОСНОВЫ КИНЕМАТИКИ2. ОСНОВЫ ДИНАМИКИ
3. ЭЛЕМЕНТЫ СТАТИКИ
4.ЗАКОНЫ СОХРАНЕНИЯ В МЕХАНИКЕ
5. МЕХАНИЧЕСКИЕ КОЛЕБАНИЯ И ВОЛНЫ
3.
1. ОСНОВЫ КИНЕМАТИКИМеханика
1.1 Общие сведения о движении
1.2 Равномерное прямолинейное движение. Скорость
1.3 Соотношения между единицами скорости
1.4 Таблица для перевода скорости из км/ч в м/с
1.5 Равномерное прямолинейное движение. Перемещение
1.6 Уравнение равномерного прямолинейного движения
1.7 Сложение скоростей (относительность движения)
Содержание
4.
1.8 Равноускоренное прямолинейное движение.Ускорение
1.9 Равноускоренное прямолинейное движение.
Скорость
1.10 Равноускоренное прямолинейное движение.
Перемещение . Координата
1.11 Свободное падение
1.12 Ускорение свободного падения на поверхности
некоторых планет и спутников
1.13 Равномерное движение по окружности - 1
1.14 Равномерное движение по окружности - 2
1.15 Ускорения некоторых систем отсчёта
Содержание
5.
2. ОСНОВЫ ДИНАМИКИ2.1 Сила
2.2 Масса
2.4 Первый закон Ньютона - закон инерции
2.5 Второй закон Ньютона. Третий закон Ньютона
2.6 Гравитационное взаимодействие
2.7 Силы, действующие в различных случаях
2.8 Сила тяжести
2.9 Движение тел под действием силы тяжести - 1
2.10 Движение тел под действием силы тяжести - 2
Содержание
6.
2.11 Искусственные спутники Земли2.12 Космические скорости
2.13 Космические скорости для Земли
2.14 Электромагнитное взаимодействие
2.15 Вес тела
2.16 Сила трения скольжения
2.17 Значения коэффициента трения скольжения μ
2.18 Сила трения покоя
2.19 Жидкое трение
Содержание
7.
3. ЭЛЕМЕНТЫ СТАТИКИ3.1 Элементы статики твёрдых тел
3.2 Момент силы относительно точки
3.3 Равнодействующая двух сил, направленных под
углом друг к другу
3.4 Равноденствие тел при отсутствии вращения
Содержание
8.
4.ЗАКОНЫ СОХРАНЕНИЯ В МЕХАНИКЕ4.1 Сила и импульс
4.2 Закон сохранения импульса - 1
4.3 Закон сохранения импульса - 2
4.4 Абсолютно неупругий удар
4.14 Мощность
4.15 Коэффициент
полезного
действия (КПД)
4.5 Механическая работа
4.6 Теорема о кинетической энергии
4.7 Работа силы тяжести
4.8 Работа силы тяжести и потенциальная энергия
4.9 Энергия (Тело брошено вертикально вверх)
4.10 Работа силы упругости и потенциальная энергия
4.11 Энергия (Тело колеблется под действием силы упругости)
4.12 Закон сохранения механической энергии
4.13 Работа силы трения
Содержание
9.
5. МЕХАНИЧЕСКИЕ КОЛЕБАНИЯ И ВОЛНЫ5.1 Колебания тела на пружине -1
5.2 Колебания тела на пружине -2
5.3 Колебания тела на пружине -3
5.4 Математический маятник - 1
5.5 Математический маятник - 2
5.6 Математический маятник - 3
5.7 Гармонические колебания
5.8 Виды колебаний
5.9 Механические колебания (звук)
5.10 Диапазоны слышимых звуков
Содержание
10.
Механика.- раздел физики, который изучает
механическое движение и механическое
взаимодействие тел.
Кинематика.
Статика.
Динамика.
Законы сохранения.
Механические колебания и волны.
Содержание
11.
Общие сведения о движенииМеханическое
движение тела
Прямая задача
механики
- изменение его положения в пространстве
относительно других тел с течением времени.
- определять положение тела в любой
момент времени.
Материальная
точка
- тело, размерами которого в данных условиях
движения можно пренебречь.
Система отсчета
(СО)
- тело отсчета, система координат, связанная с
ним, прибор для измерения времени
Перемещение
- направленный отрезок прямой,
соединяющий начальное положение тела с его последующим
положением
траектория
Содержание
перемещение
12.
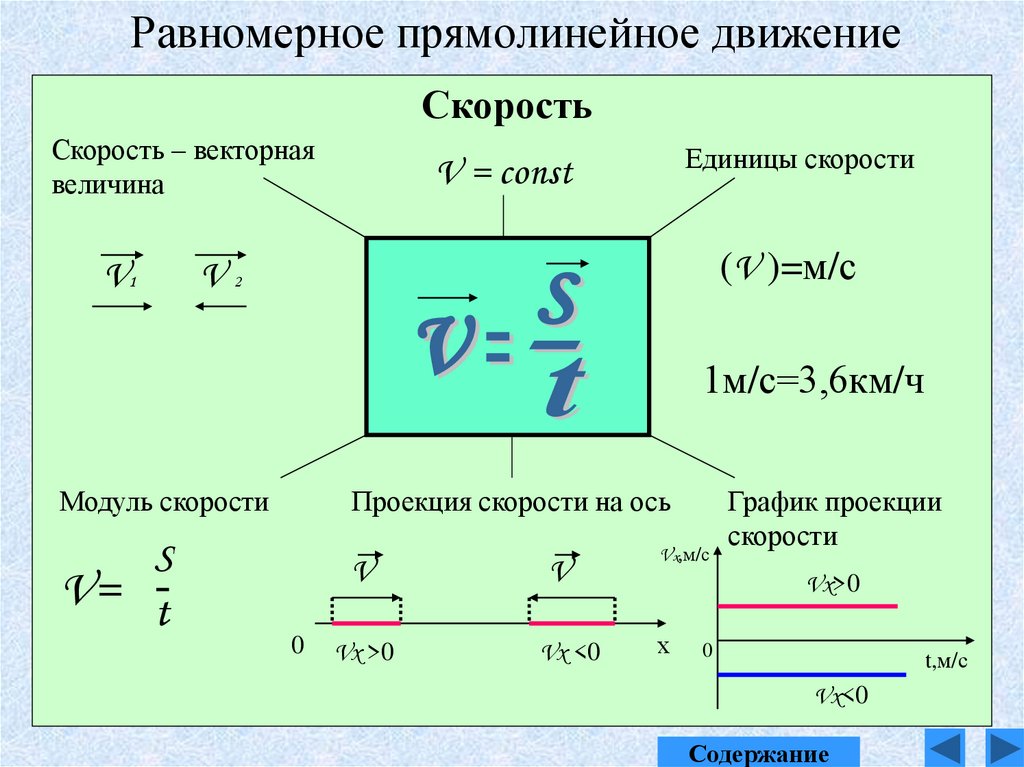
Равномерное прямолинейное движениеСкорость
Скорость – векторная
величина
V1
Единицы скорости
V = const
(V )=м/с
V2
1м/с=3,6км/ч
Модуль скорости
Проекция скорости на ось
S
V= -t
0
V
V
Vx,м/с
Vx >0
Vx <0
х
График проекции
скорости
Vx>0
0
t,м/с
Vx<0
Содержание
13.
Соотношение между единицами скоростиЕдиниц
ы
скорост
и
м/ч
1см/с
36
cм/ м/мин км/ч м/c
с
км/c
-5
1
0,6
0,03 0,01 10
6
-3
1 0,27 2,78*1
8
0
3,6
1
10
1км/ч 100 27, 16,7
0
8
1м/с 360 100
604
0 6
1км/с
3,6* 10, 6*10 3600 1000
1
1км/ч=1/3,6м/с=0,27778м/с=16,667м/мин=27,778см/с
*10
1000м5 1м
1км/ч=1* 3600с = 3,6с = 0,28м/c;
1м/с=3,6км/ч
Содержание
-4
14.
Таблица для перевода скорости из км/ч в м/сСодержание
15.
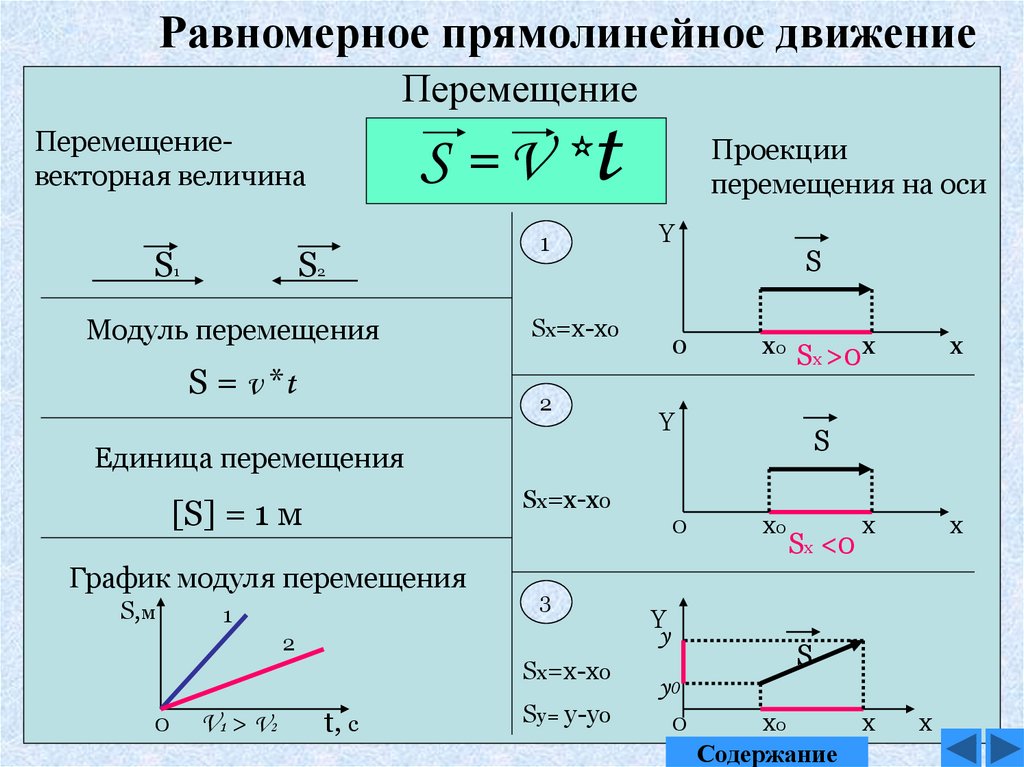
Равномерное прямолинейное движениеПеремещение
S = V *t
Перемещениевекторная величина
S1
S2
Модуль перемещения
S = v *t
1
Проекции
перемещения на оси
Y
Sx=x-x0
2
0
S
х0 Sx >0 х
Y
S
Единица перемещения
Sx=x-x0
[S] = 1 м
График модуля перемещения
S,м
1
2
0
V1 > V2
3
Sx=x-x0
t, с
Sy= y-y0
0
Y
y
y0
0
х
х0
Sx <0
х
х
S
х0
х
Содержание
х
16.
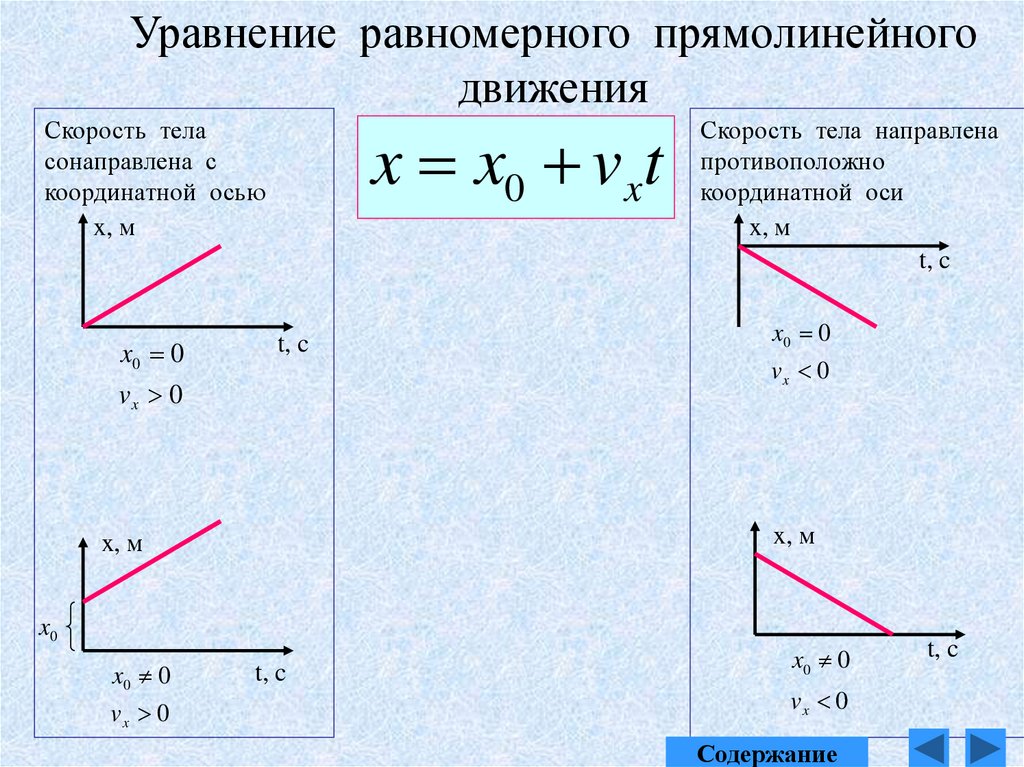
Уравнение равномерного прямолинейногодвижения
Скорость тела
сонаправлена с
координатной осью
x, м
x0 0
x x0 vxt
t, c
vx 0
x0
vx 0
x0 0
vx 0
x, м
x, м
x0 0
Скорость тела направлена
противоположно
координатной оси
x, м
t, c
t, c
x0 0
vx 0
Содержание
t, c
17.
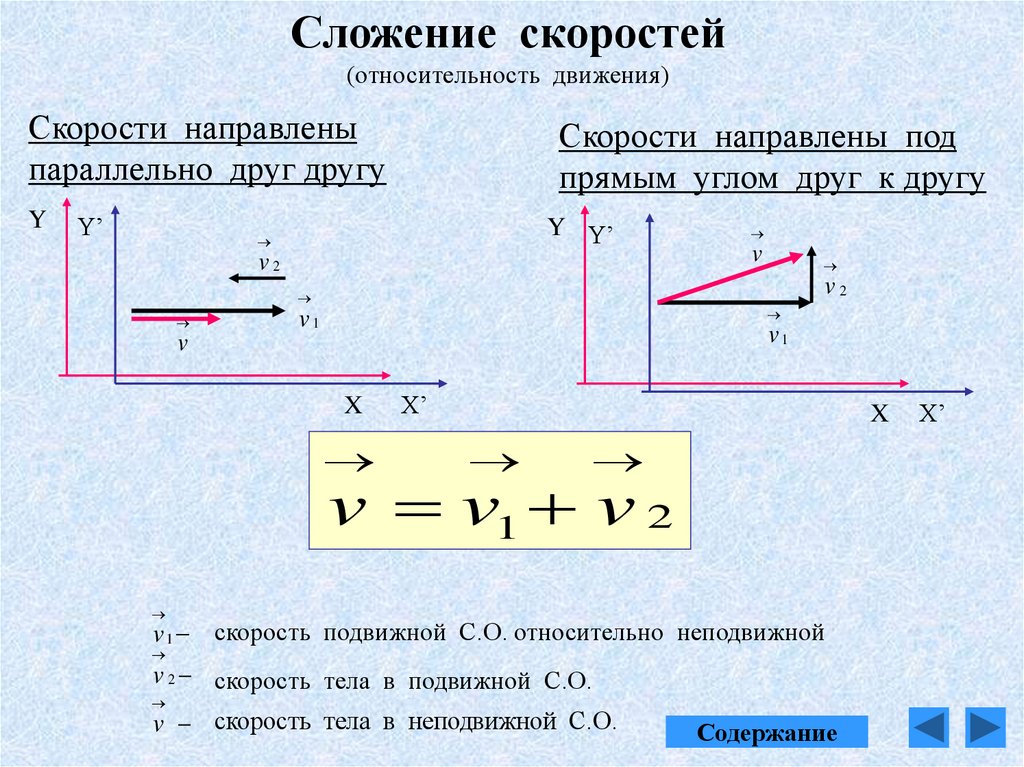
Сложение скоростей(относительность движения)
Скорости направлены
параллельно друг другу
Скорости направлены под
прямым углом друг к другу
Y
Y Y’
Y’
v2
v
v2
v1
v1
v
X
X’
X
v v1 v 2
v1
скорость подвижной С.О. относительно неподвижной
v 2 скорость тела в подвижной С.О.
v скорость тела в неподвижной С.О.
Содержание
X’
18.
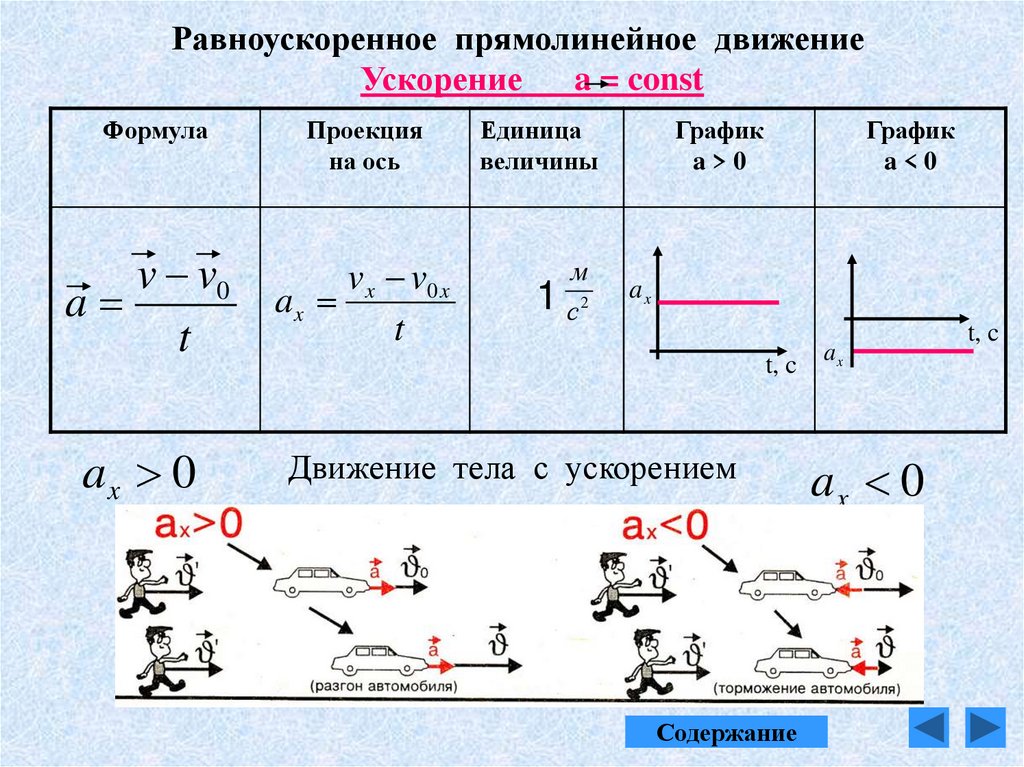
Равноускоренное прямолинейное движениеУскорение
a = const
Формула
Проекция
на ось
Единица
величины
v v0
a
t
v x v0 x
ax
t
ax 0
Движение тела с ускорением
м
1 с2
График
a>0
График
a<0
ax
t, c
Содержание
ax
ax 0
t, c
19.
Равноускоренное прямолинейное движениеСкорость
Формула
v0 x 0
График
vx a xt
v0 x 0 ax 0
t
v0 x 0
vx
vx v0 x axt
v0 x
ax 0
vx
v0 x 0
t
t
vx a xt
v0 x 0 a x 0
vx v0 x axt
v v at
vx
ax 0
v0 x 0
При движении
вдоль оси «X» в
положительном
направлении
v vx
v0 v0 x
vx
v0 x
t
Содержание
20.
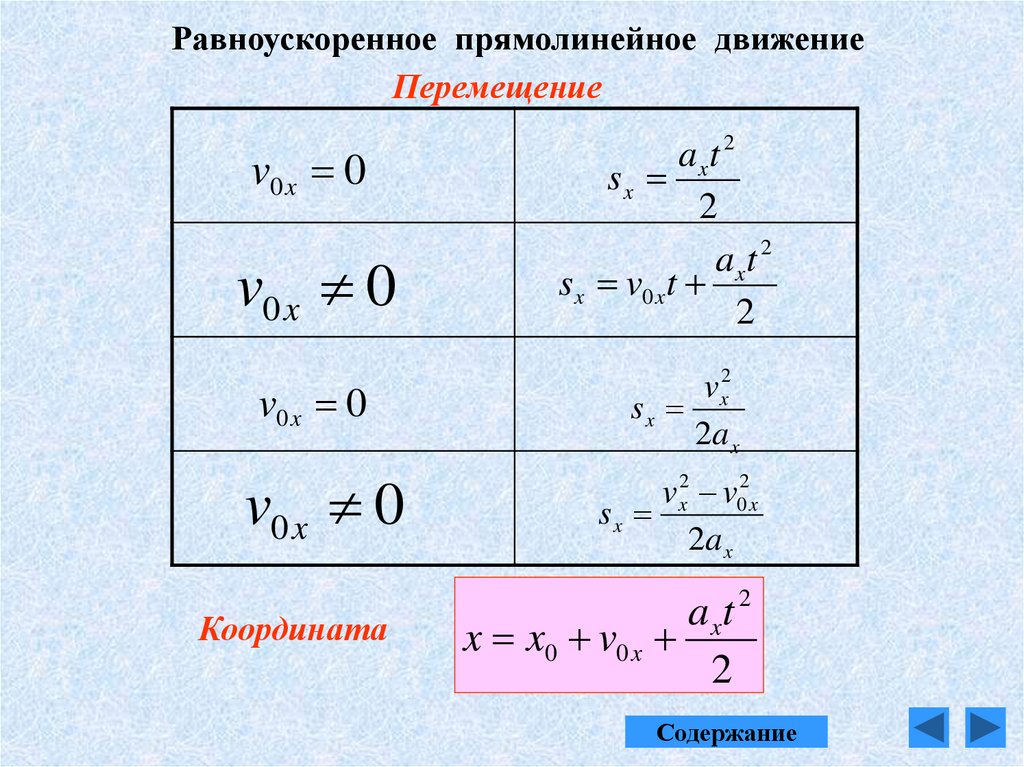
Равноускоренное прямолинейное движениеПеремещение
v0 x 0
v0 x 0
axt 2
sx
2
axt 2
s x v0 xt
2
v0 x 0
v x2
sx
2a x
v0 x 0
v x2 v02x
sx
2a x
Координата
axt 2
x x0 v0 x
2
Содержание
21.
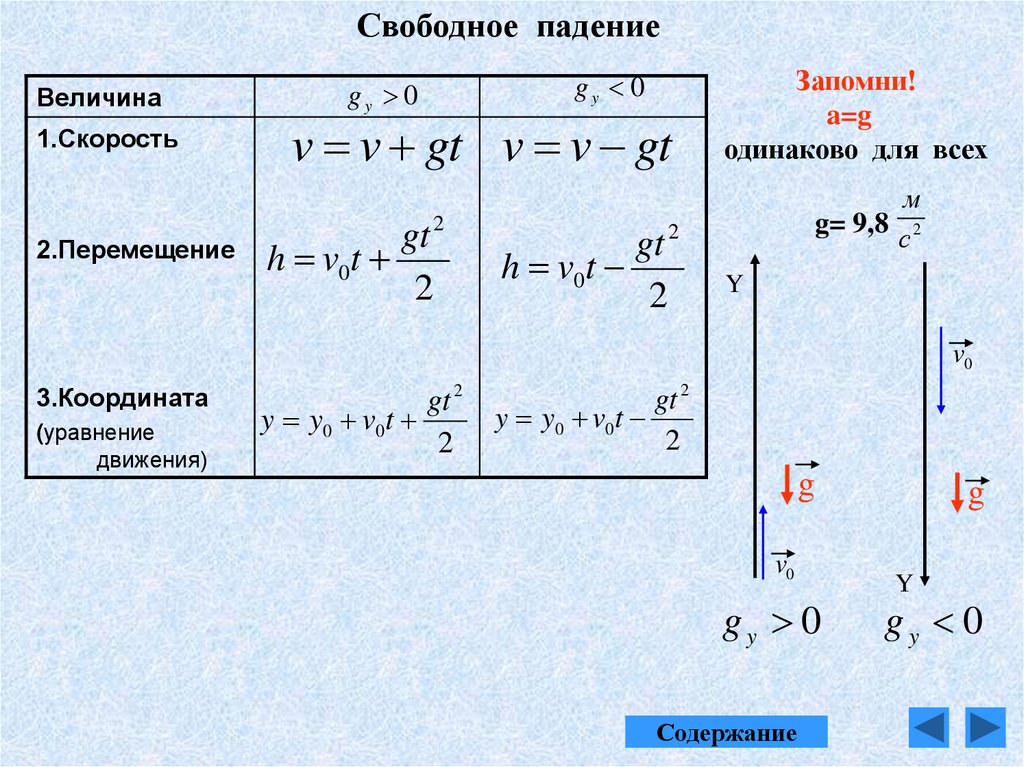
Свободное падениеВеличина
1.Скорость
2.Перемещение
gy 0
gy 0
v v gt v v gt
gt 2
h v0t
2
gt 2
h v0t
2
Запомни!
a=g
одинаково для всех
м
g= 9,8 2
с
Y
v0
3.Координата
(уравнение
движения)
gt 2
y y0 v0t
2
gt 2
y y0 v0t
2
g
v0
gy 0
Содержание
g
Y
gy 0
22.
Ускорение свободного падения на поверхностинекоторых планет и спутников
Планета
g,
м
с2
Венера
8,76
Земля
9,80665
Марс
3,76
Меркурий
3,7
Уран
9,06
Юпитер
23,5
Луна
1,623
Содержание
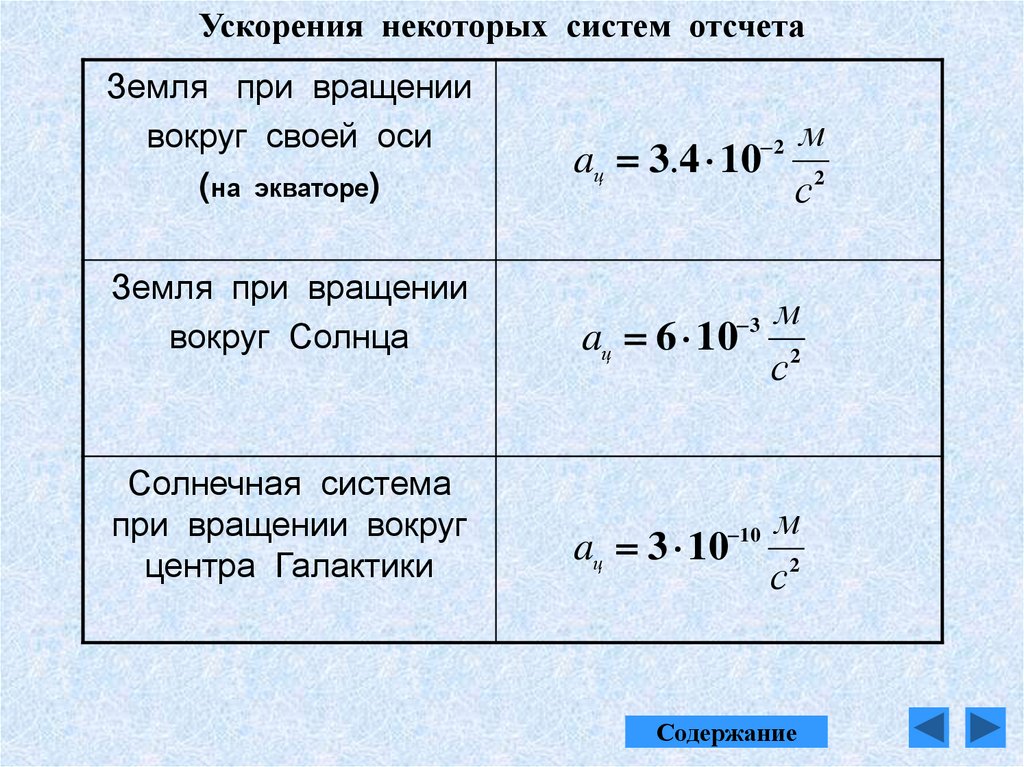
23.
Ускорения некоторых систем отсчетаЗемля при вращении
вокруг своей оси
(на экваторе)
Земля при вращении
вокруг Солнца
Солнечная система
при вращении вокруг
центра Галактики
м
aц 3.4 10 2
с
2
м
aц 6 10 2
с
3
aц 3 10
10
м
с2
Содержание
24.
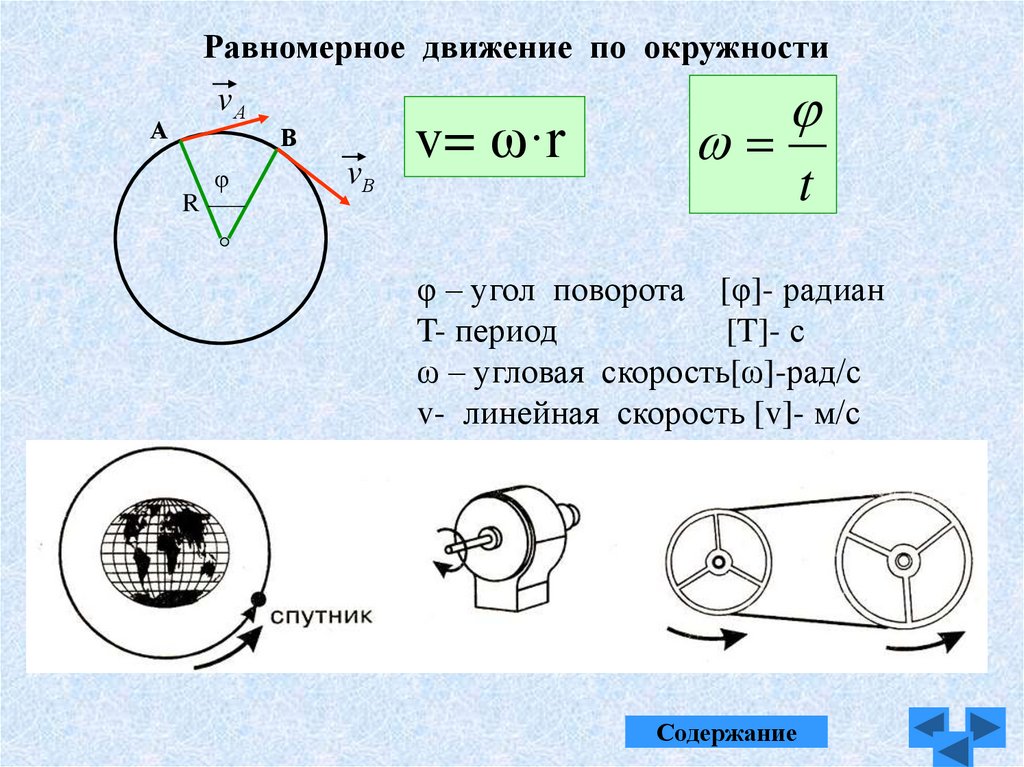
Равномерное движение по окружностиvА
А
В
φ
R
vВ
v= ω·r
t
φ – угол поворота [φ]- радиан
T- период
[T]- с
ω – угловая скорость[ω]-рад/с
v- линейная скорость [v]- м/с
Содержание
25.
Равномерное движение по окружностиv Величина
v
Частота
a
a
Формула
1
n
T
a
v
a v
Угловая
скорость
Единица
измерения
t
с
2 n
2
T
Линейная
скорость
2 R
v
T
v 2 n
Центро стремительное
ускорение
v2
a
R
4 2 R
a
T2
Содержание
1
рад/с
м/с
м
с2
26.
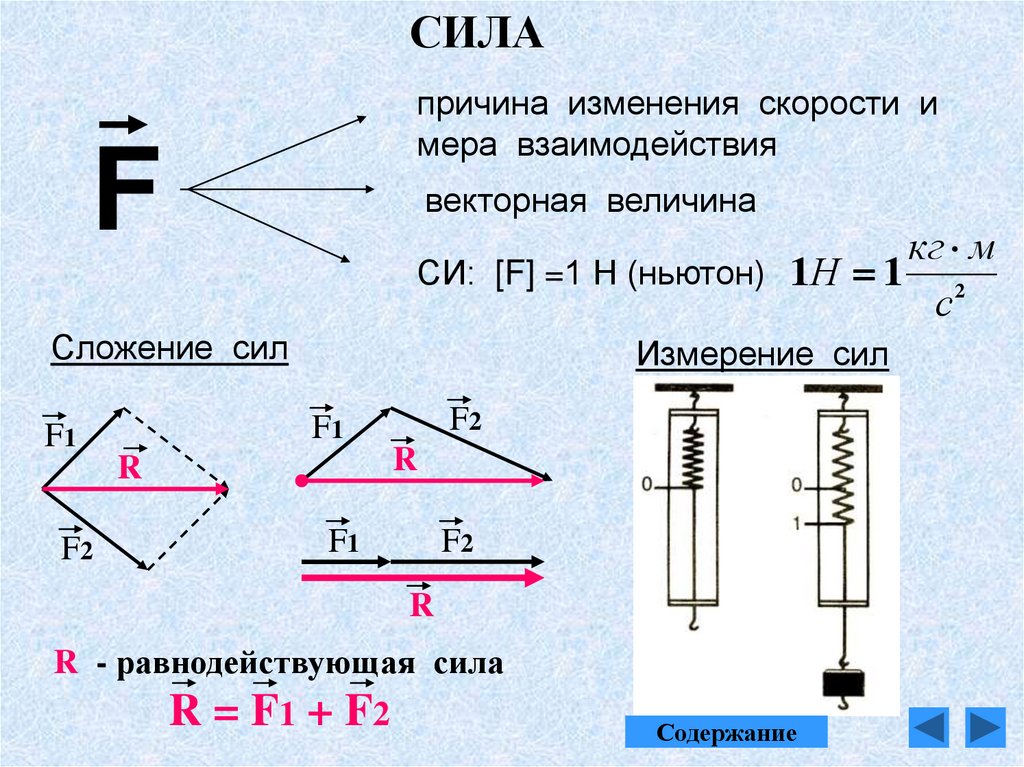
СИЛАпричина изменения скорости и
мера взаимодействия
F
векторная величина
кг м
СИ: [F] =1 Н (ньютон) 1Н 1 2
с
Сложение сил
Измерение сил
R
R
F2
F2
F1
F1
F1
F2
R
R - равнодействующая сила
R = F1 + F2
Содержание
27.
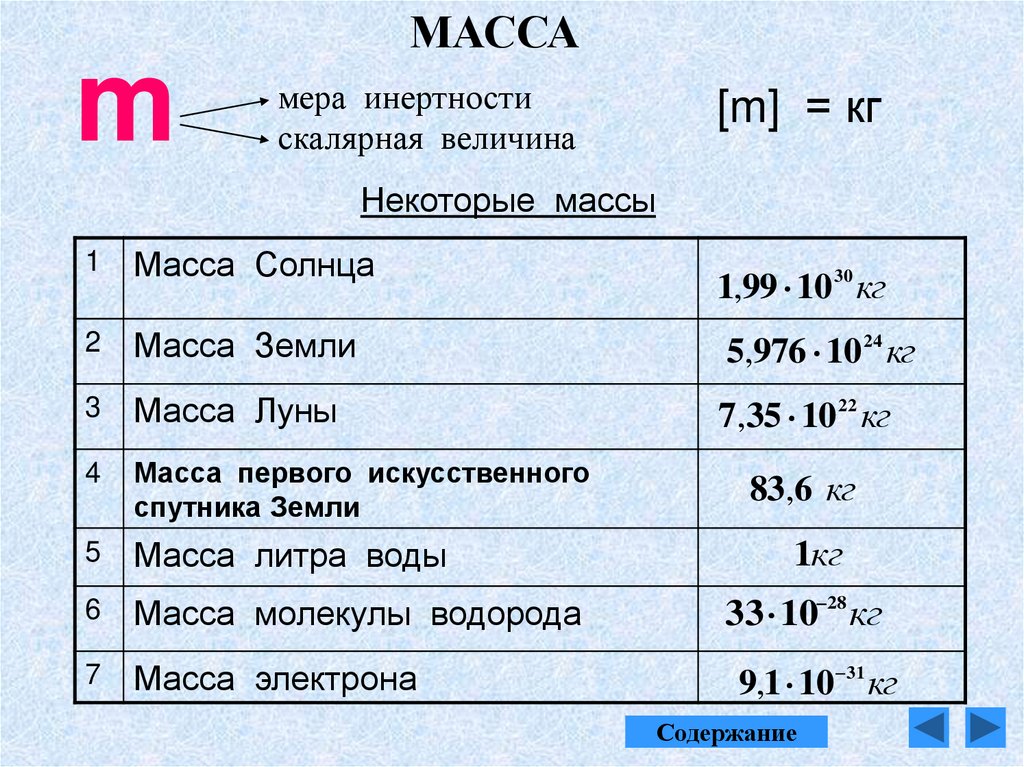
МАССАm
мера инертности
скалярная величина
[m] = кг
Некоторые массы
1
Масса Солнца
1,99 10 30 кг
2
Масса Земли
5,976 10 24 кг
3
Масса Луны
7,35 10 22 кг
4
Масса первого искусственного
спутника Земли
5
Масса литра воды
6
Масса молекулы водорода
33 10 28 кг
7
Масса электрона
9,1 10 31 кг
83,6 кг
1кг
Содержание
28.
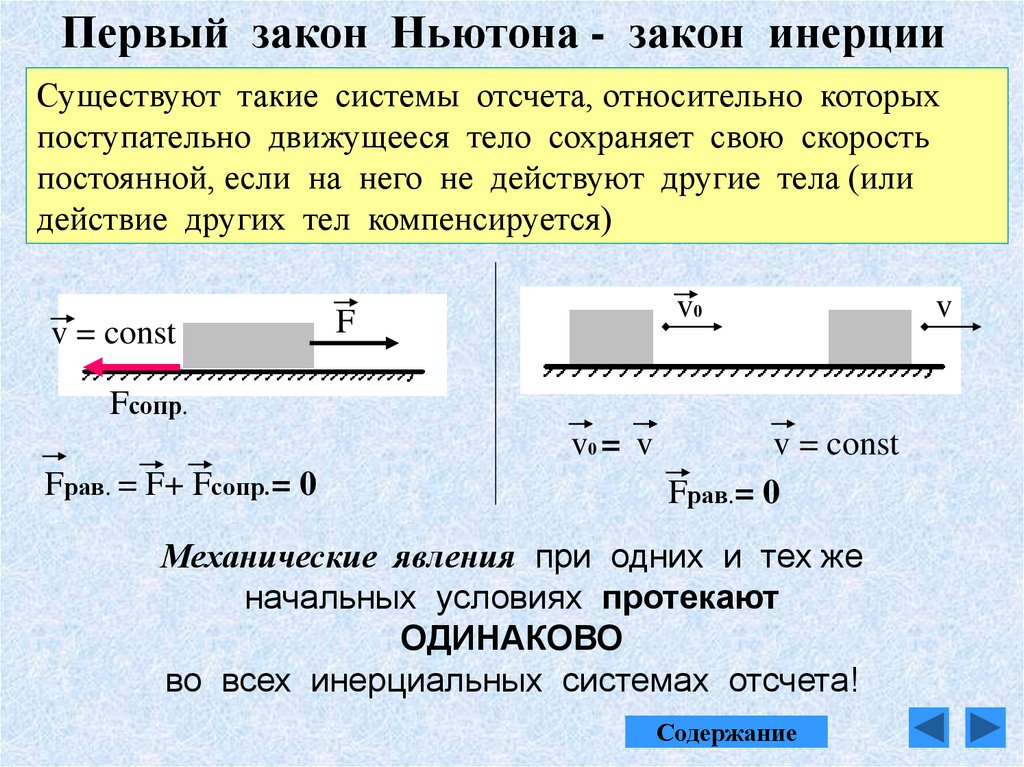
Первый закон Ньютона - закон инерцииСуществуют такие системы отсчета, относительно которых
поступательно движущееся тело сохраняет свою скорость
постоянной, если на него не действуют другие тела (или
действие других тел компенсируется)
v = const
v0
F
Fсопр.
v0 = v
Fрав. = F+ Fсопр.= 0
v = const
Fрав.= 0
Механические явления при одних и тех же
начальных условиях протекают
ОДИНАКОВО
во всех инерциальных системах отсчета!
Содержание
v
29.
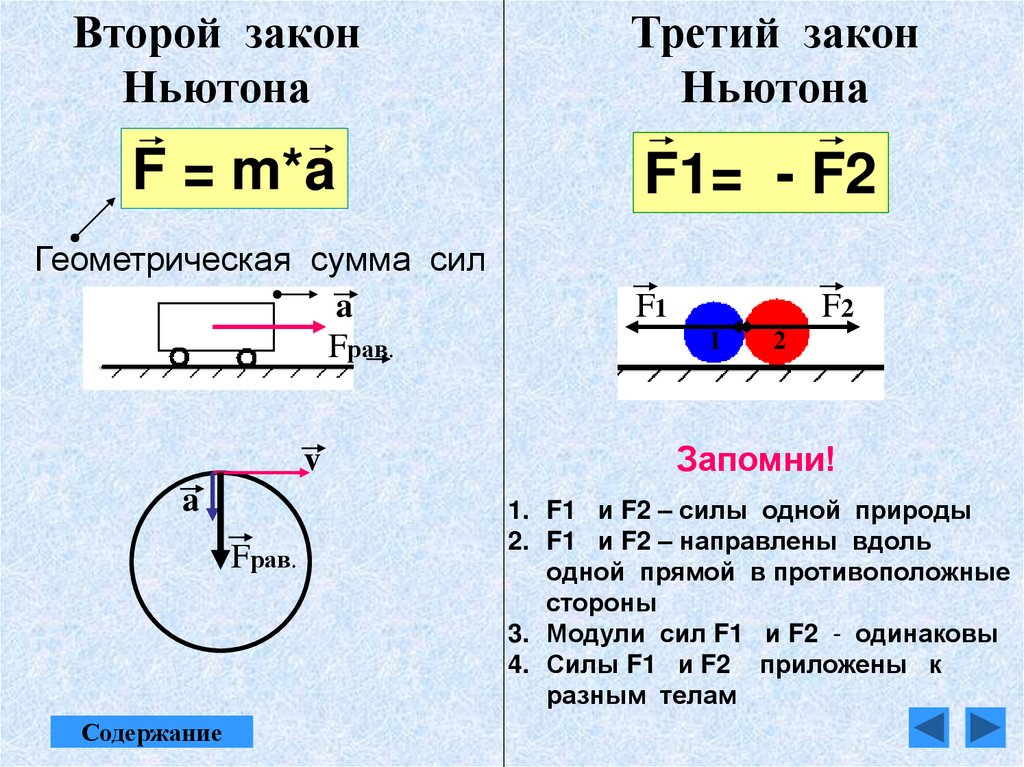
Второй законНьютона
Третий закон
Ньютона
F = m*a
F1= - F2
Геометрическая сумма сил
a
Fрав.
v
a
Fрав.
Содержание
F1
F2
1
2
Запомни!
1. F1 и F2 – силы одной природы
2. F1 и F2 – направлены вдоль
одной прямой в противоположные
стороны
3. Модули сил F1 и F2 - одинаковы
4. Силы F1 и F2 приложены к
разным телам
30.
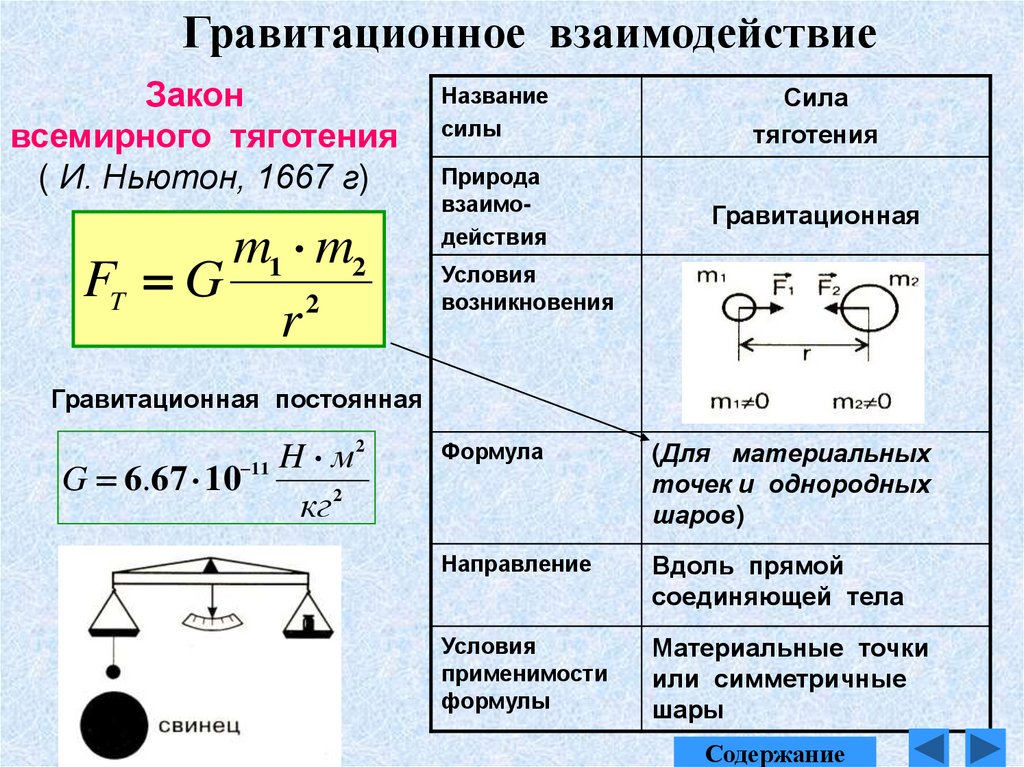
Гравитационное взаимодействиеЗакон
всемирного тяготения
( И. Ньютон, 1667 г)
m1 m2
FT G
2
r
Название
силы
Сила
тяготения
Природа
взаимодействия
Гравитационная
Условия
возникновения
Гравитационная постоянная
2
H
м
G 6.67 10 11
кг 2
Формула
(Для материальных
точек и однородных
шаров)
Направление
Вдоль прямой
соединяющей тела
Условия
применимости
формулы
Материальные точки
или симметричные
шары
Содержание
31.
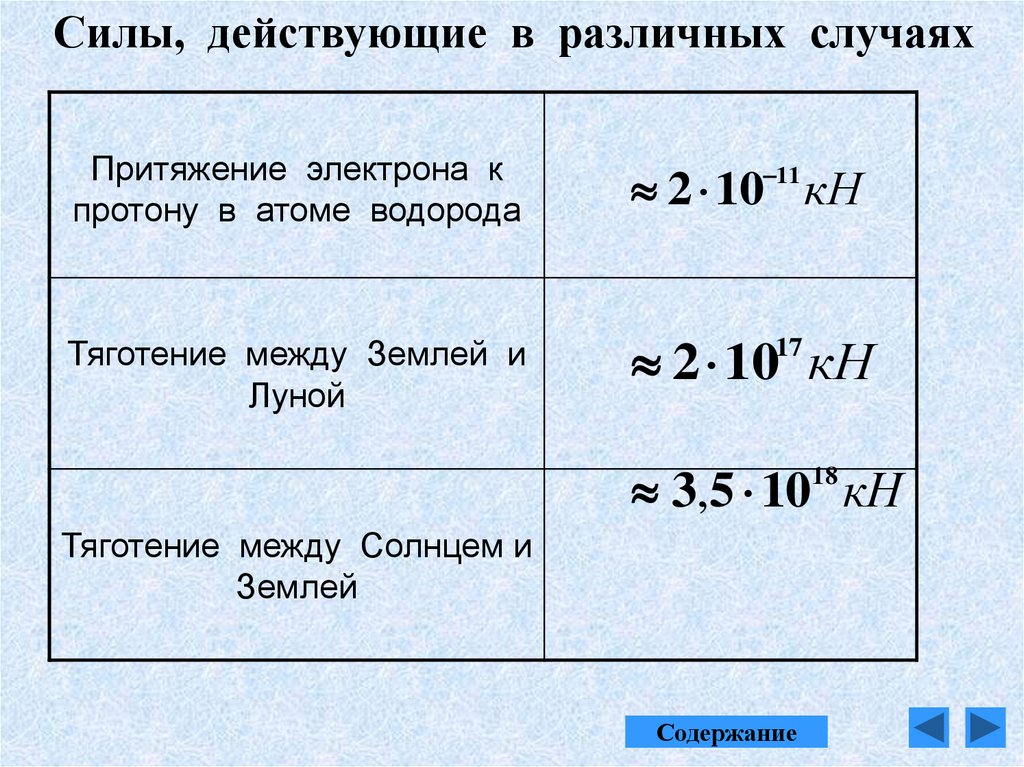
Силы, действующие в различных случаяхПритяжение электрона к
протону в атоме водорода
2 10 кН
Тяготение между Землей и
Луной
2 10 кН
11
17
3,5 10 кН
18
Тяготение между Солнцем и
Землей
Содержание
32.
Сила тяжести(Сила притяжения к Земле)
1. Сила тяжести и масса тела
пропорциональны друг другу.
mg
mg
M
g G 2
R
Название
силы
Сила
тяжести
Природа
взаимодействия
Гравитационная
2. Сила тяжести равна по модулю
весу тела, если ускорение
опоры или подвеса равно
нулю.
Формула
F= mg
Направление
Вертикально
вниз
Содержание
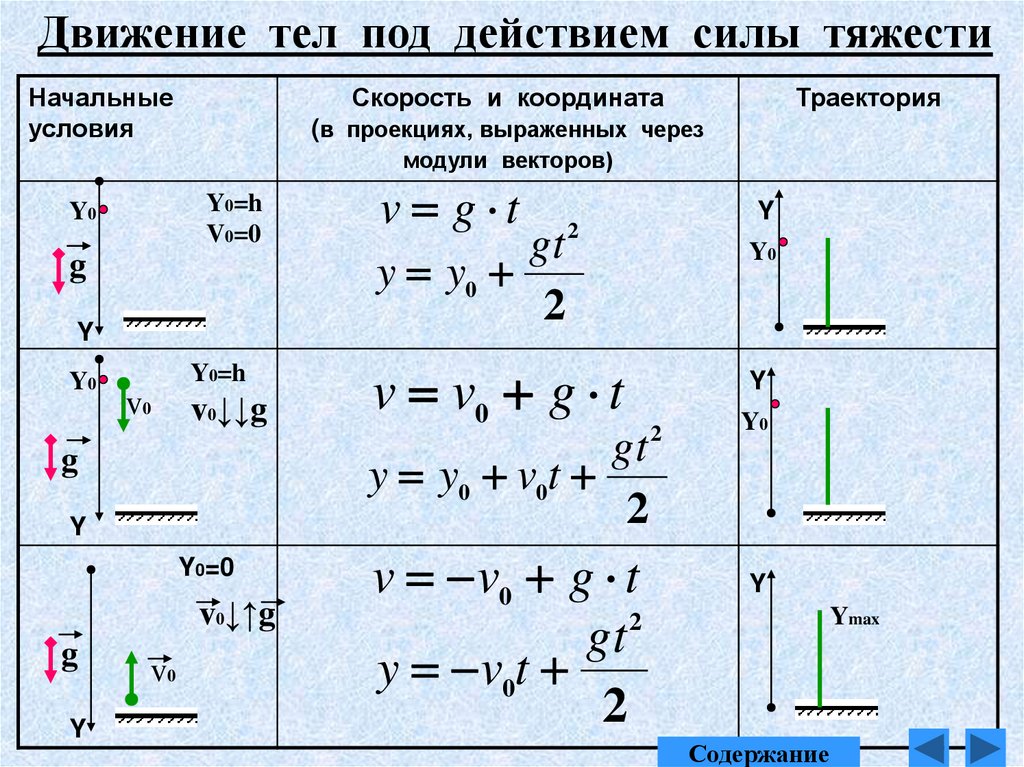
33.
Движение тел под действием силы тяжестиНачальные
условия
Скорость и координата
Траектория
(в проекциях, выраженных через
модули векторов)
Y0=h
V0=0
Y0
g
Y
Y0
Y0=h
v0
v0↓↓g
Y
Y0=0
v0↓↑g
Y
gt
y y0
2
v0
Y
2
v v0 g t
gt
y y0 v0t
2
g
g
v g t
v v0 g t
2
gt
y v0t
2
Y0
Y
2
Y0
Y
Ymax
Содержание
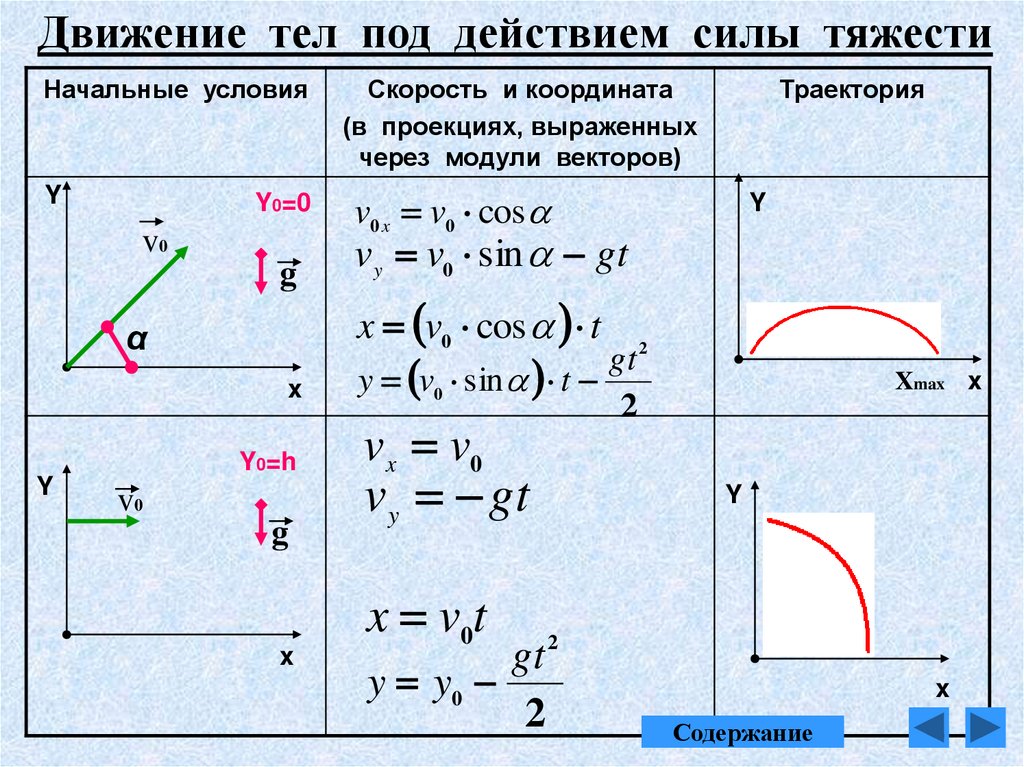
34.
Движение тел под действием силы тяжестиНачальные условия
Скорость и координата
(в проекциях, выраженных
через модули векторов)
Y
v0 x v0 cos
Y0=0
v0
g
α
x
Y0=h
Y
v0
g
x
Траектория
Y
v y v0 sin gt
x v0 cos t
gt 2
y v0 sin t
2
Xmax x
vx v0
v y gt
Y
x v0t
gt 2
y y0
2
x
Содержание
35.
Искусственные спутники Землиh
RЗ 6,4 106 м
Rз
М З 6 1024 кг
v = 8 m/c - первая космическая
скорость
v
Расстояние
от Земли
Сила
Ускорение
Скорость
h=0
Mз m
F G
Rз 2
Mз
a G 2 g
Rз
v Rз g
h
F G
Mз m
Rз h 2
v
a G
Mз
2 g
Rз h
GMз
Rз h
v Rз h
Содержание
g
Rз h
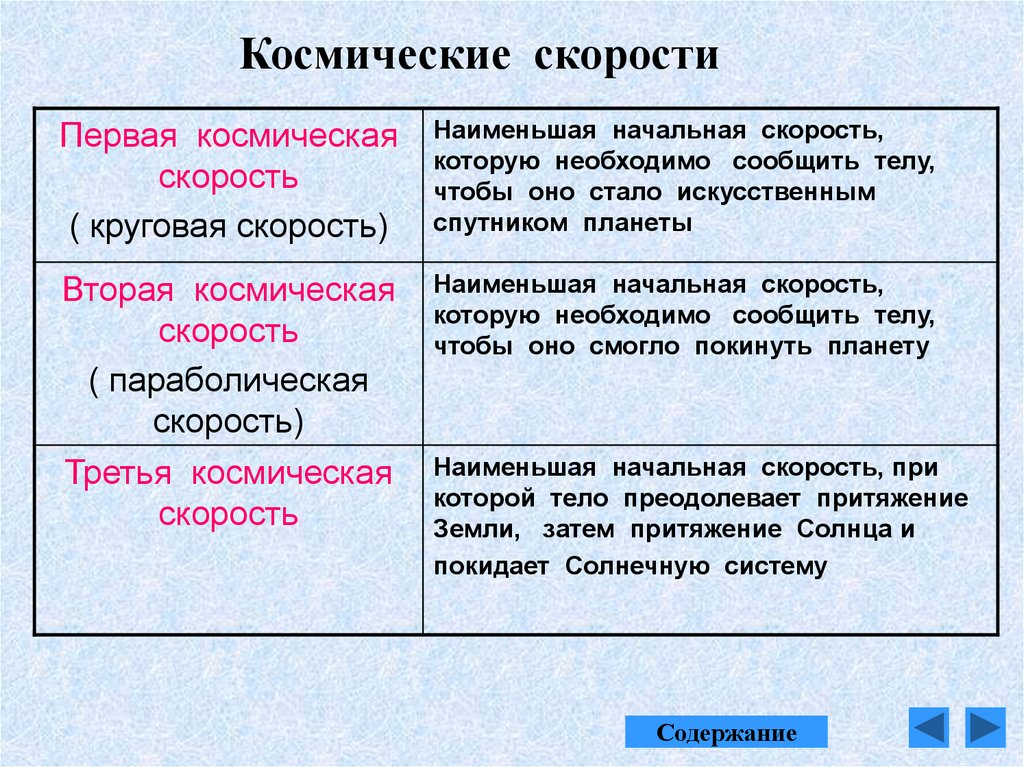
36.
Космические скоростиПервая космическая
скорость
( круговая скорость)
Наименьшая начальная скорость,
которую необходимо сообщить телу,
чтобы оно стало искусственным
спутником планеты
Вторая космическая
скорость
( параболическая
скорость)
Третья космическая
скорость
Наименьшая начальная скорость,
которую необходимо сообщить телу,
чтобы оно смогло покинуть планету
Наименьшая начальная скорость, при
которой тело преодолевает притяжение
Земли, затем притяжение Солнца и
покидает Солнечную систему
Содержание
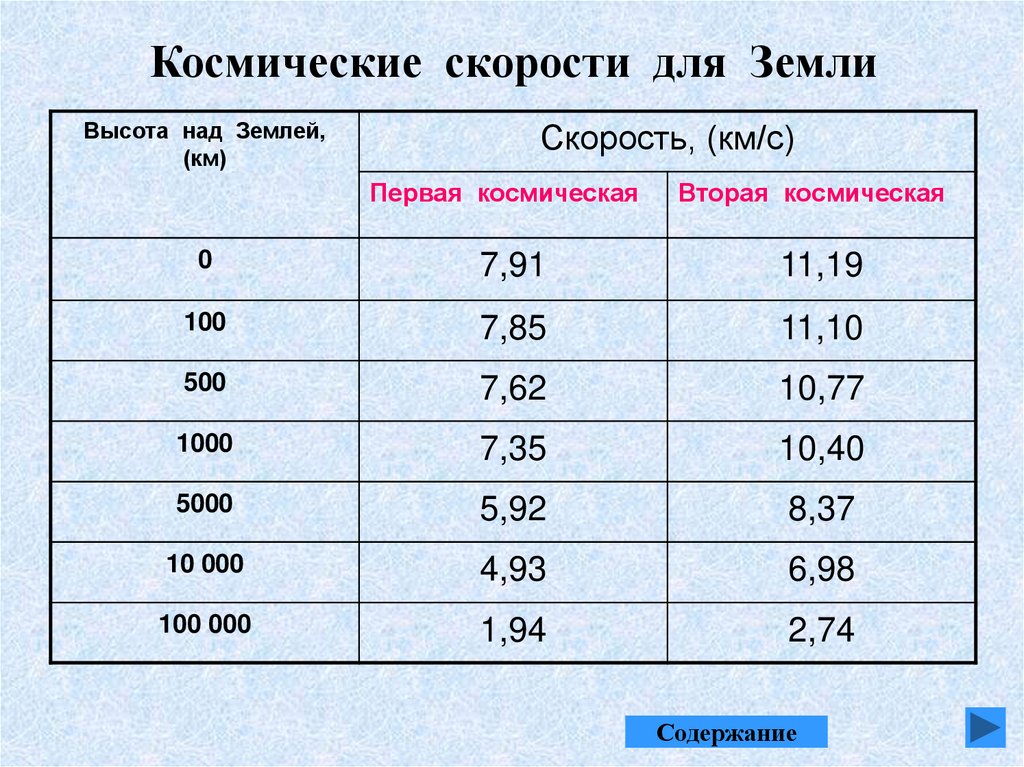
37.
Космические скорости для ЗемлиВысота над Землей,
(км)
Скорость, (км/с)
Первая космическая
Вторая космическая
0
7,91
11,19
100
7,85
11,10
500
7,62
10,77
1000
7,35
10,40
5000
5,92
8,37
10 000
4,93
6,98
100 000
1,94
2,74
Содержание
38.
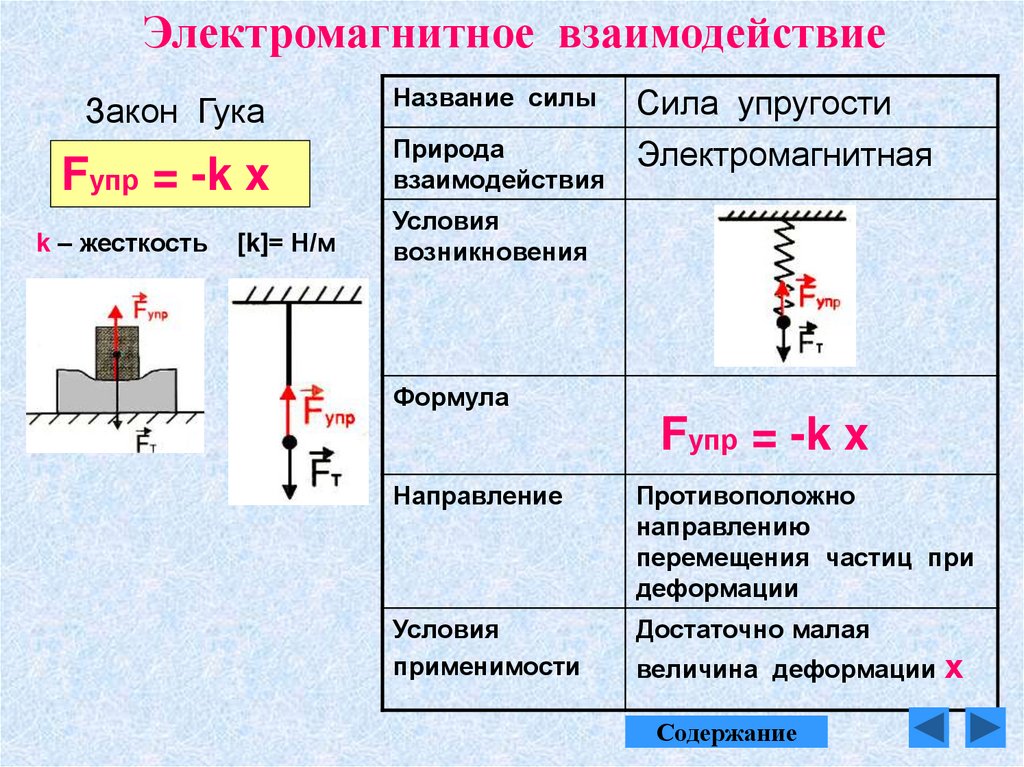
Электромагнитное взаимодействиеЗакон Гука
Fупр = -k x
k – жесткость
[k]= Н/м
Название силы
Природа
взаимодействия
Сила упругости
Электромагнитная
Условия
возникновения
Формула
Fупр = -k x
Направление
Противоположно
направлению
перемещения частиц при
деформации
Условия
применимости
Достаточно малая
величина деформации х
Содержание
39.
P - Вес тела ( сила упругости)Сила , с которой тело действует на опору или подвес
Тело неподвижно
или движется с
постоянной
скоростью
а=0
Тело движется с
ускорением
Тело движется с
ускорением
а≠0
а≠0
g
g
Fупр.
Fупр.
F упр.
Fупр.
а
g
P
а
mg
mg
P= mg
P –сила приложена к
пружине со стороны
тела.
Fупр – приложена к
телу со стороны
пружины
mg
Y
P< mg
P= m(g-a)
a =g
Y
P> mg
P= m(g+a)
Невесомость P= 0
Содержание
Y
40.
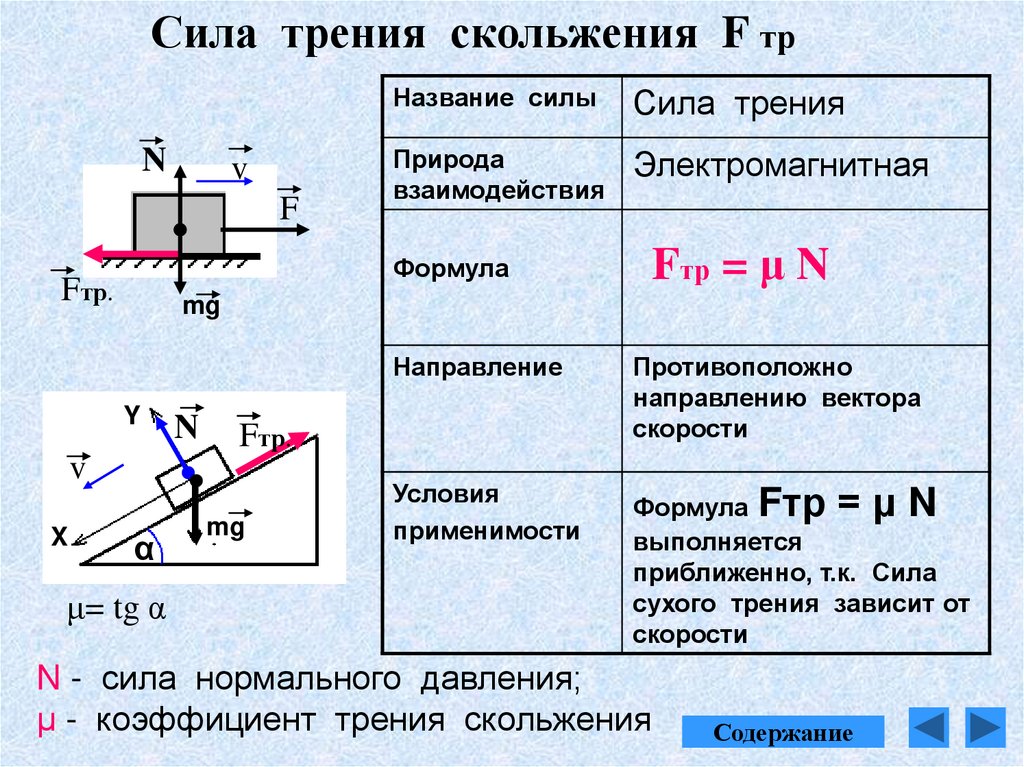
Сила трения скольжения F трN
v
F
Сила трения
Природа
взаимодействия
Электромагнитная
Fтр = μ N
Формула
Fтр.
mg
Y
N
α
μ= tg α
Направление
Противоположно
направлению вектора
скорости
Условия
применимости
Формула Fтр = μ N
выполняется
приближенно, т.к. Сила
сухого трения зависит от
скорости
Fтр.
v
X
Название силы
mg
N - сила нормального давления;
μ - коэффициент трения скольжения
Содержание
41.
Значения коэффициента трения скольженияμ для некоторых пар материалов
μ
Зависит от рода трущихся материалов
Зависит от обработки поверхностей тел.
Не зависит от силы давления.
Не зависит от площади соприкасающихся поверхностей.
Материалы
Fтр
N
Коэффициент
трения
Дерево по дереву
0,25
Резина по бетону
0,75
Кожа по чугуну
0,56
Сталь по стали
0,20
Сталь по льду
0,02
Содержание
42.
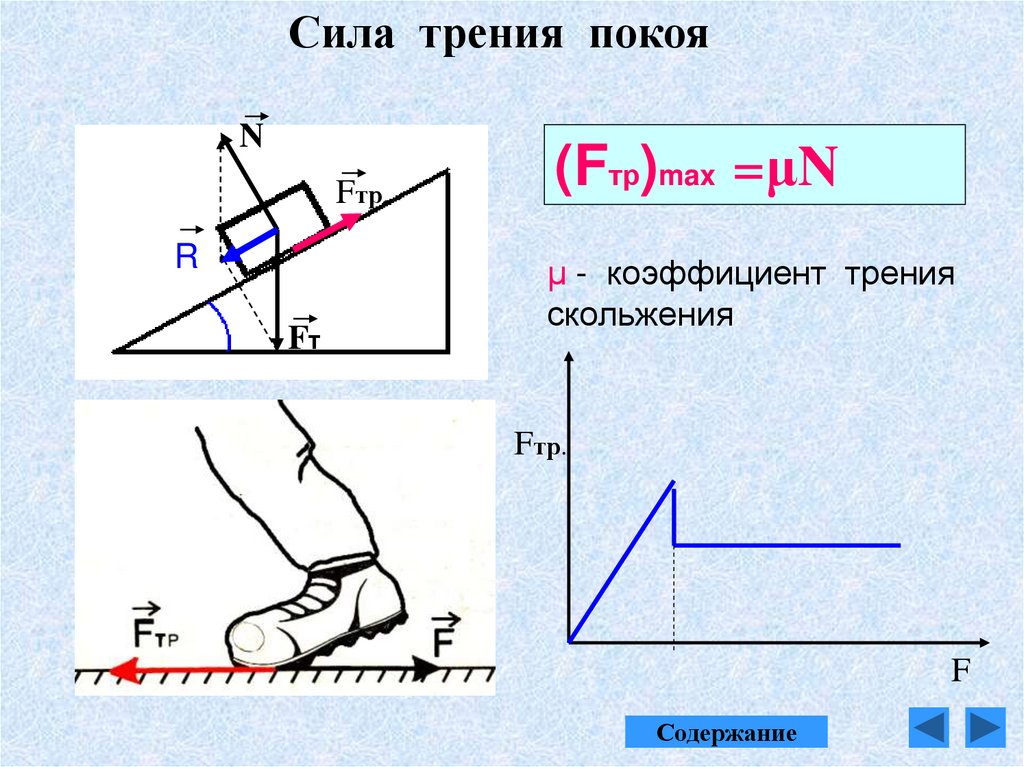
Сила трения покояN
Fтр.
R
Fт
(Fтр)max =μN
μ - коэффициент трения
скольжения
Fтр.
F
Содержание
43.
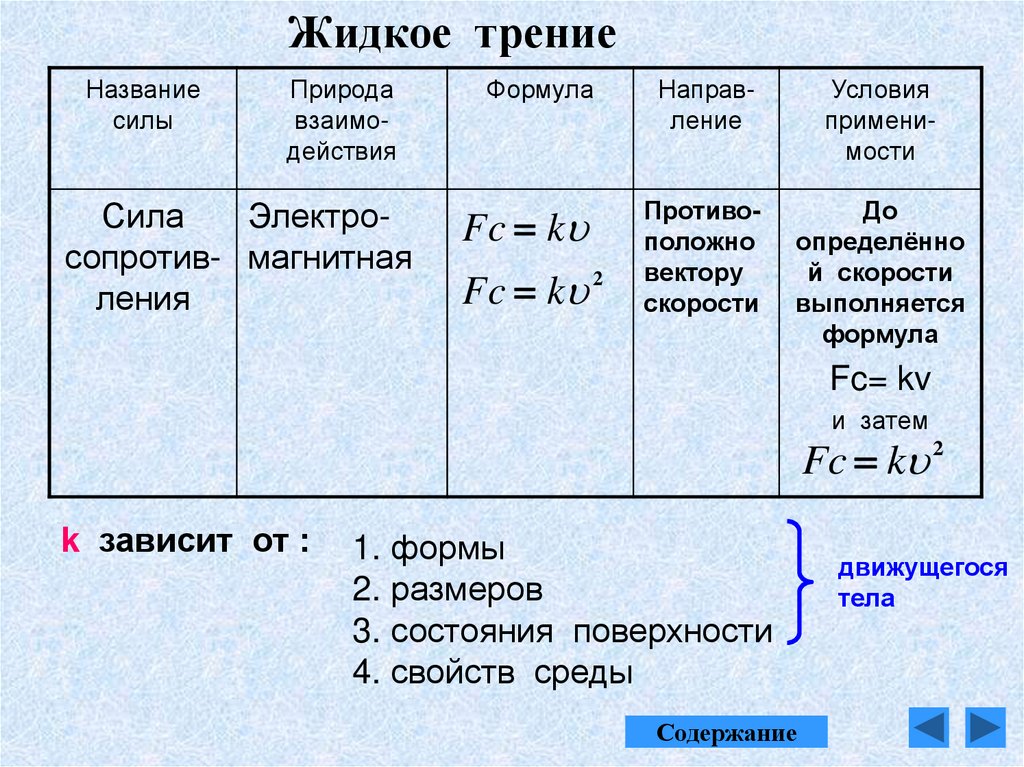
Жидкое трениеНазвание
силы
Природа
взаимодействия
Сила
Электросопротив- магнитная
ления
Формула
Направление
Условия
применимости
Fc k
Противоположно
вектору
скорости
До
определённо
й скорости
выполняется
формула
Fc k 2
Fc= kv
и затем
Fc k
k зависит от :
1. формы
2. размеров
3. состояния поверхности
4. свойств среды
Содержание
2
движущегося
тела
44.
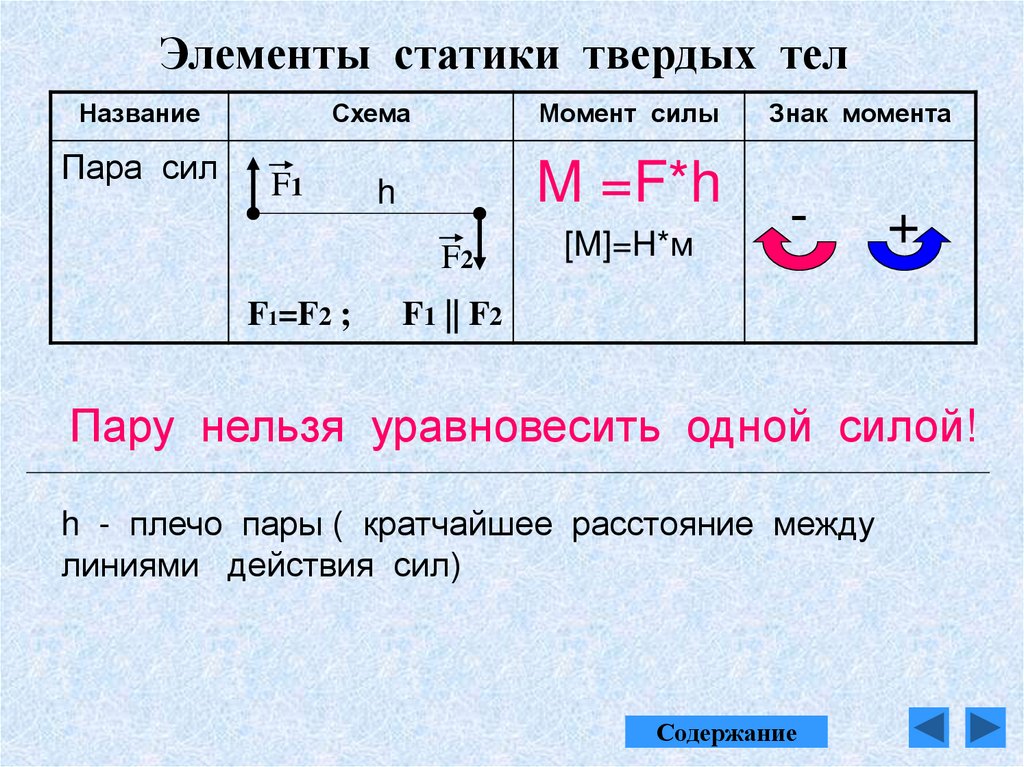
Элементы статики твердых телНазвание
Пара сил
Схема
Момент силы
h
M =F*h
F1
F2
F1=F2 ;
[M]=H*м
Знак момента
-
+
F1 || F2
Пару нельзя уравновесить одной силой!
h - плечо пары ( кратчайшее расстояние между
линиями действия сил)
Содержание
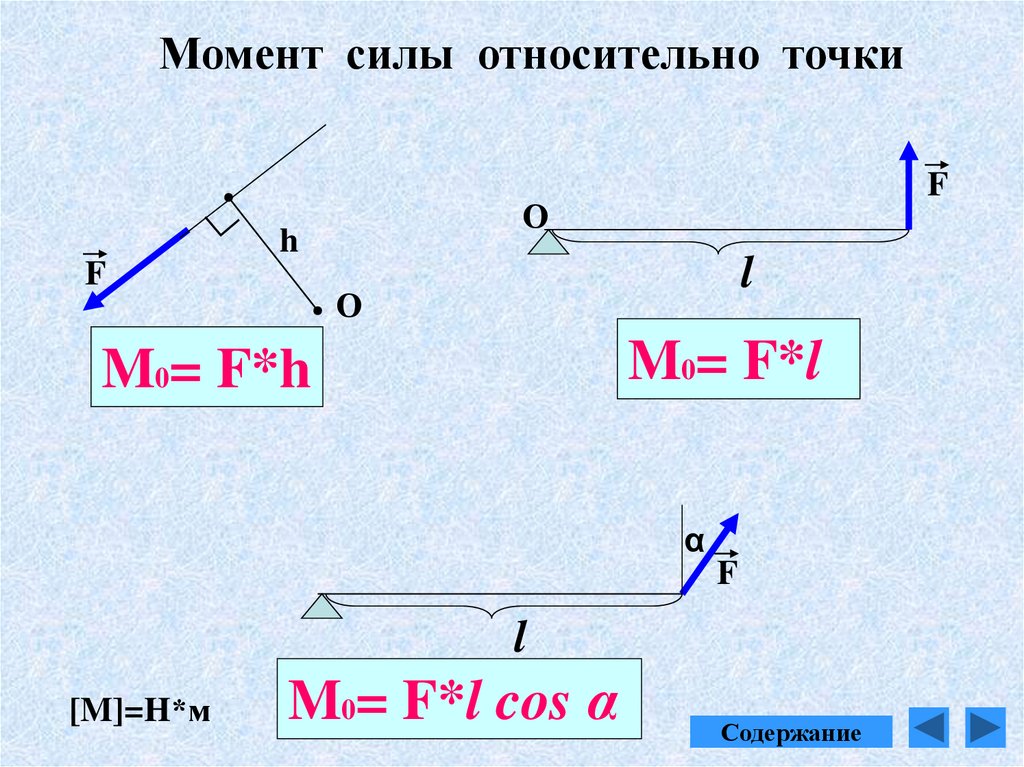
45.
Момент силы относительно точкиО
h
F
F
l
О
M0= F*l
M0= F*h
α
F
l
[M]=H*м
M0= F*l cos α
Содержание
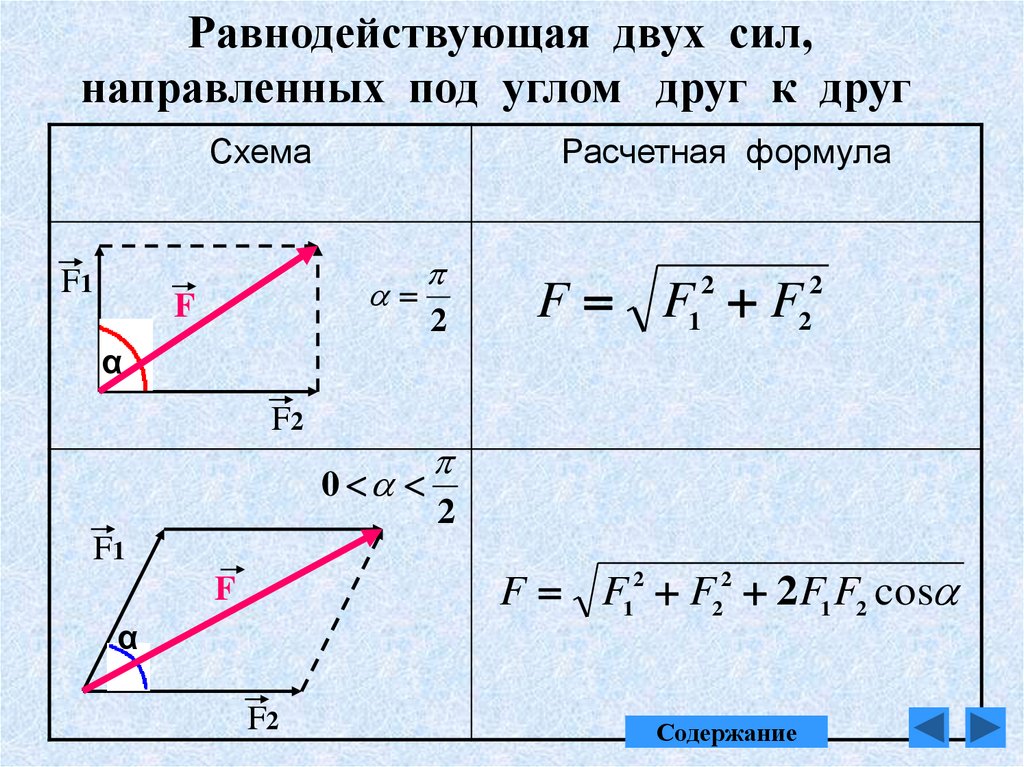
46.
Равнодействующая двух сил,направленных под углом друг к друг
Схема
F1
Расчетная формула
F
2
F F F
2
1
2
2
α
F2
0
F1
2
F F F 2 F1 F2 cos
2
1
F
α
F2
2
2
Содержание
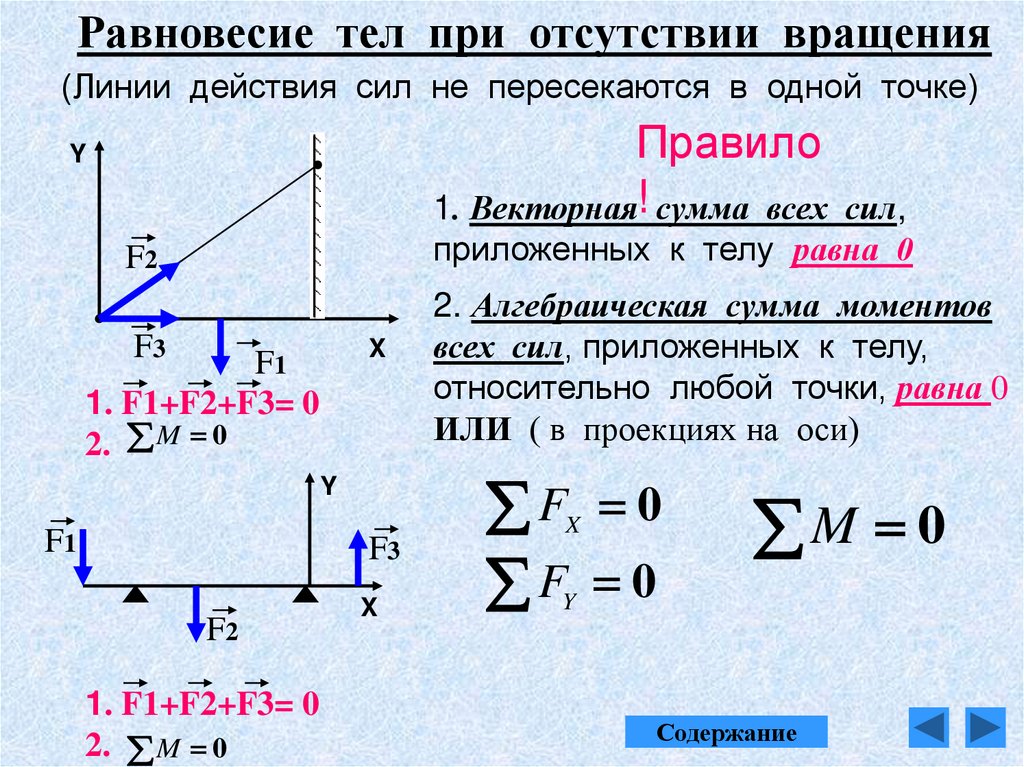
47.
Равновесие тел при отсутствии вращения(Линии действия сил не пересекаются в одной точке)
Правило
1. Векторная! сумма всех сил,
Y
приложенных к телу равна 0
F2
F3
X
F1
1. F1+F2+F3= 0
2. M 0
Y
F1
F3
F2
1. F1+F2+F3= 0
2. M 0
X
2. Алгебраическая сумма моментов
всех сил, приложенных к телу,
относительно любой точки, равна 0
ИЛИ ( в проекциях на оси)
F 0
F 0
X
M 0
Y
Содержание
48.
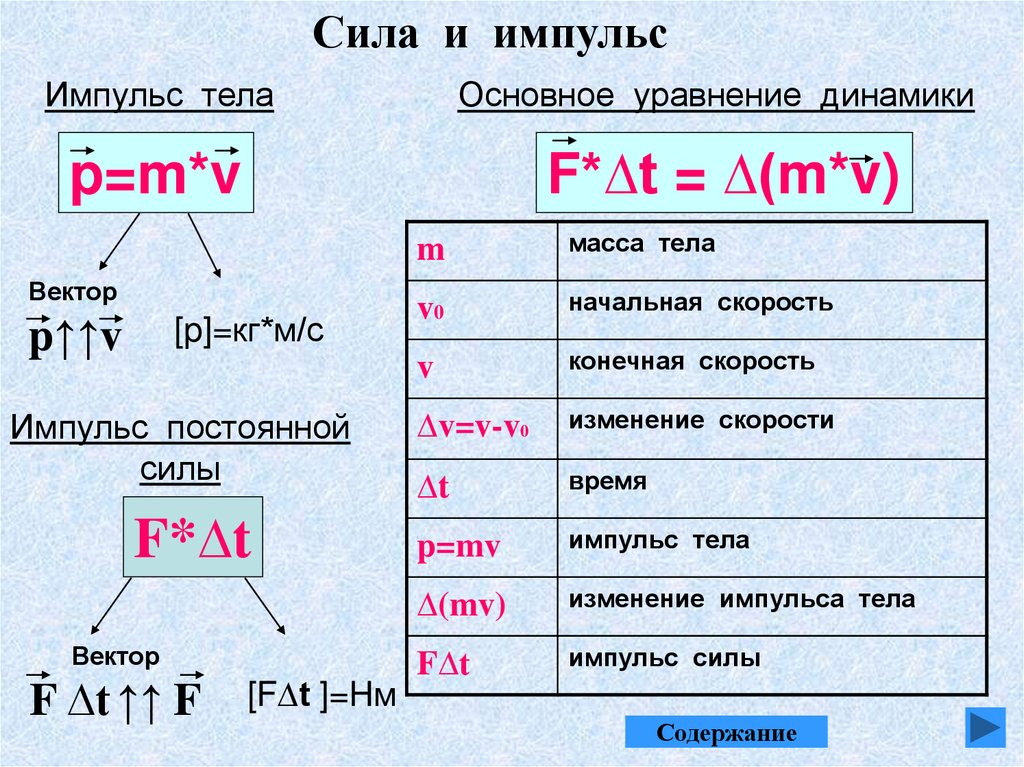
Сила и импульсИмпульс тела
Основное уравнение динамики
p=m*v
F*∆t = ∆(m*v)
m
масса тела
v0
начальная скорость
v
конечная скорость
Импульс постоянной
силы
∆v=v-v0
изменение скорости
∆t
время
F*∆t
p=mv
импульс тела
∆(mv)
изменение импульса тела
F∆t
импульс силы
Вектор
[p]=кг*м/с
p↑↑v
Вектор
F ∆t ↑↑ F
[F∆t ]=Hм
Содержание
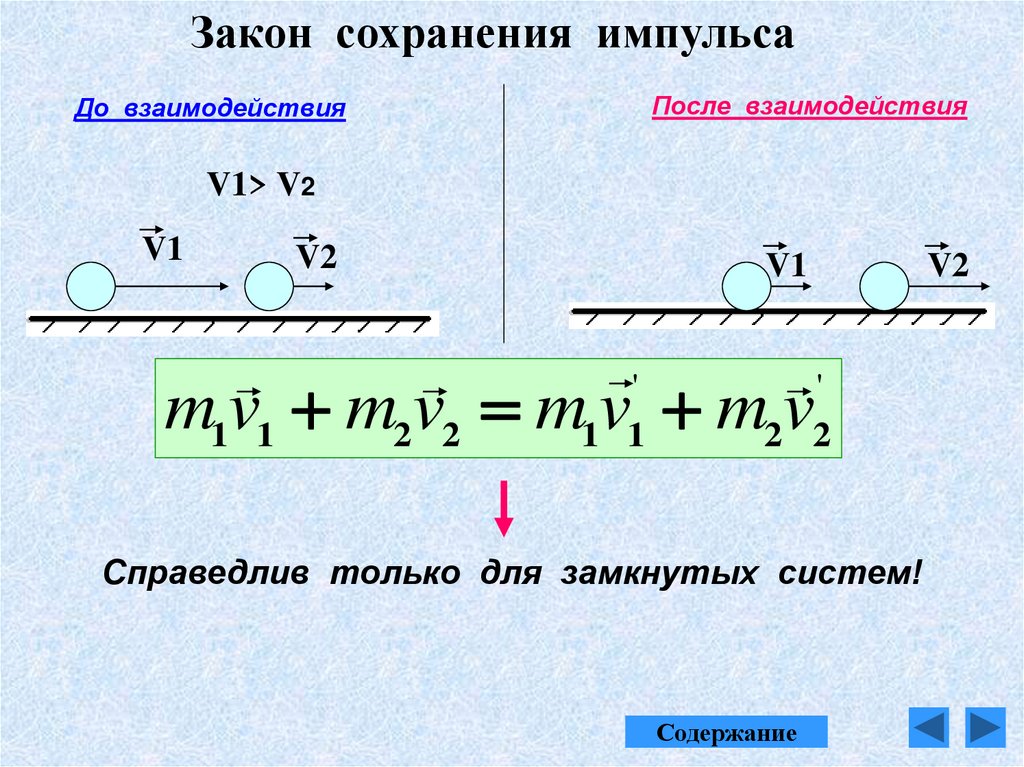
49.
Закон сохранения импульсаПосле взаимодействия
До взаимодействия
V1> V2
V1
V2
V1
m1v1 m2v2 m v m v
'
1 1
'
2 2
Справедлив только для замкнутых систем!
Содержание
V2
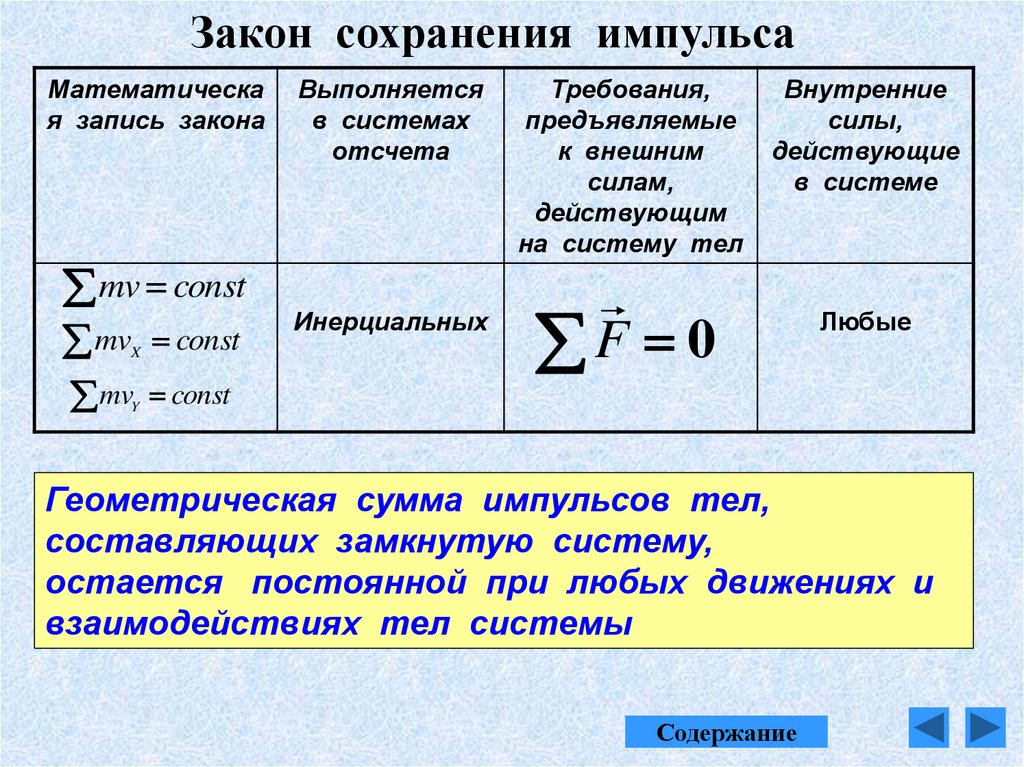
50.
Закон сохранения импульсаМатематическа
я запись закона
mv const
mvX const
mv const
Выполняется
в системах
отсчета
Требования,
предъявляемые
к внешним
силам,
действующим
на систему тел
Внутренние
силы,
действующие
в системе
Инерциальных
F 0
Любые
Y
Геометрическая сумма импульсов тел,
составляющих замкнутую систему,
остается постоянной при любых движениях и
взаимодействиях тел системы
Содержание
51.
Абсолютно неупругий ударm1v1
(m1+m2)v
m2v2
m1v1 m2v2 m1 m2 v
Содержание
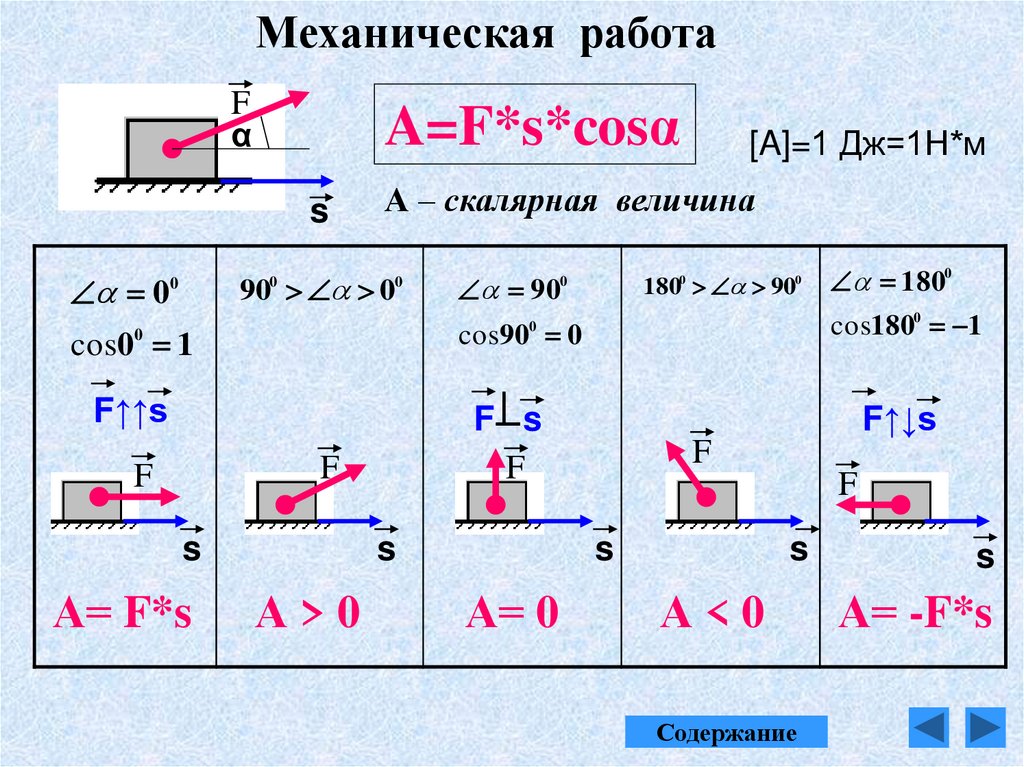
52.
Механическая работаF
α
A=F*s*cosα
s
0
А – скалярная величина
90 0
0
0
[A]=1 Дж=1Н*м
0
90
1800 900
0
1800
cos0 1
cos90 0
cos1800 1
F↑↑s
F s
F
F↑↓s
0
0
F
F
s
А= F*s
s
А>0
F
F
s
А= 0
s
А<0
Содержание
s
А= -F*s
53.
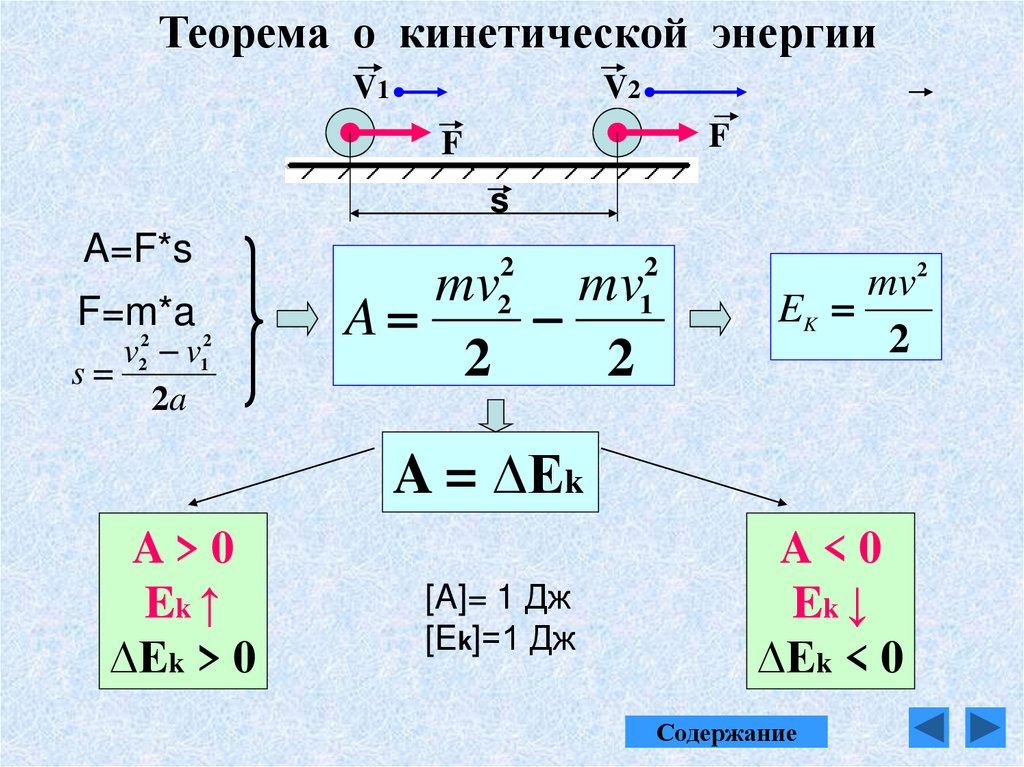
Теорема о кинетической энергииV1
V2
F
F
s
A=F*s
F=m*a
v22 v12
s
2a
2
2
2
1
mv mv
A
2
2
mv2
EK
2
A = ∆Ek
A>0
Ek ↑
∆Ek > 0
[A]= 1 Дж
[Ek]=1 Дж
A<0
Ek ↓
∆Ek < 0
Содержание
54.
Работа силы тяжестиТело движется по вертикали
Fт↑↑h (вниз)
Fт↓↑h (вверх)
Тело движется
не по вертикали
mg
h
h
mg
A1=Fт*S1*cosα1= Fт*h
A = mgh
A = - mgh
A2=Fт*S2*cosα2= Fт*h
Работа силы тяжести на замкнутой траектории равна 0
Содержание
55.
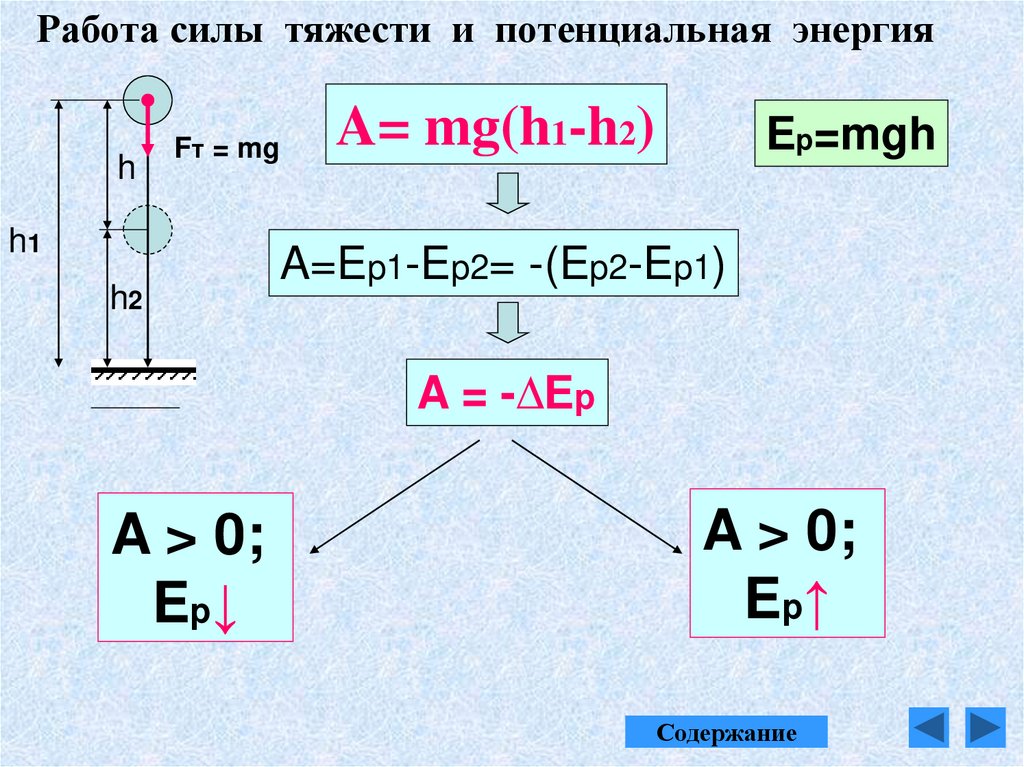
Работа силы тяжести и потенциальная энергияh
Fт = mg
h1
h2
A= mg(h1-h2)
Ep=mgh
A=Ep1-Ep2= -(Ep2-Ep1)
A = -∆Ep
A > 0;
Ep↓
A > 0;
Ep↑
Содержание
56.
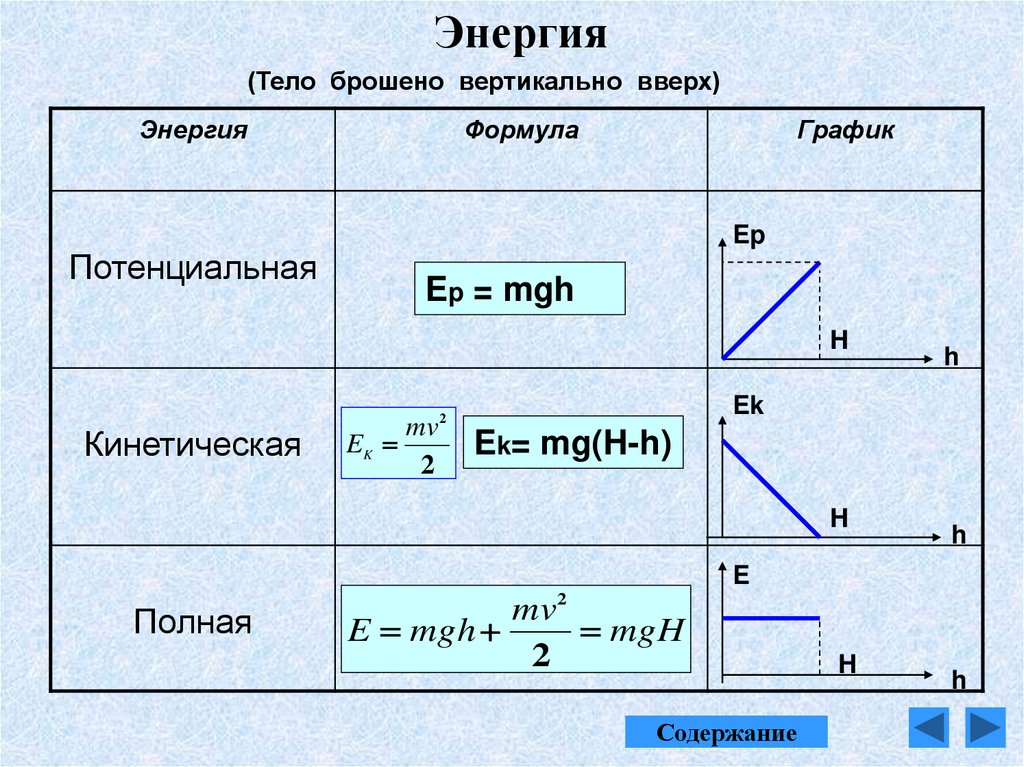
Энергия(Тело брошено вертикально вверх)
Энергия
Формула
График
Ep
Потенциальная
Ep = mgh
H
Кинетическая
EK
mv
2
h
Ek
2
Ek= mg(H-h)
H
h
E
Полная
mv2
E mgh
mgH
2
Содержание
H
h
57.
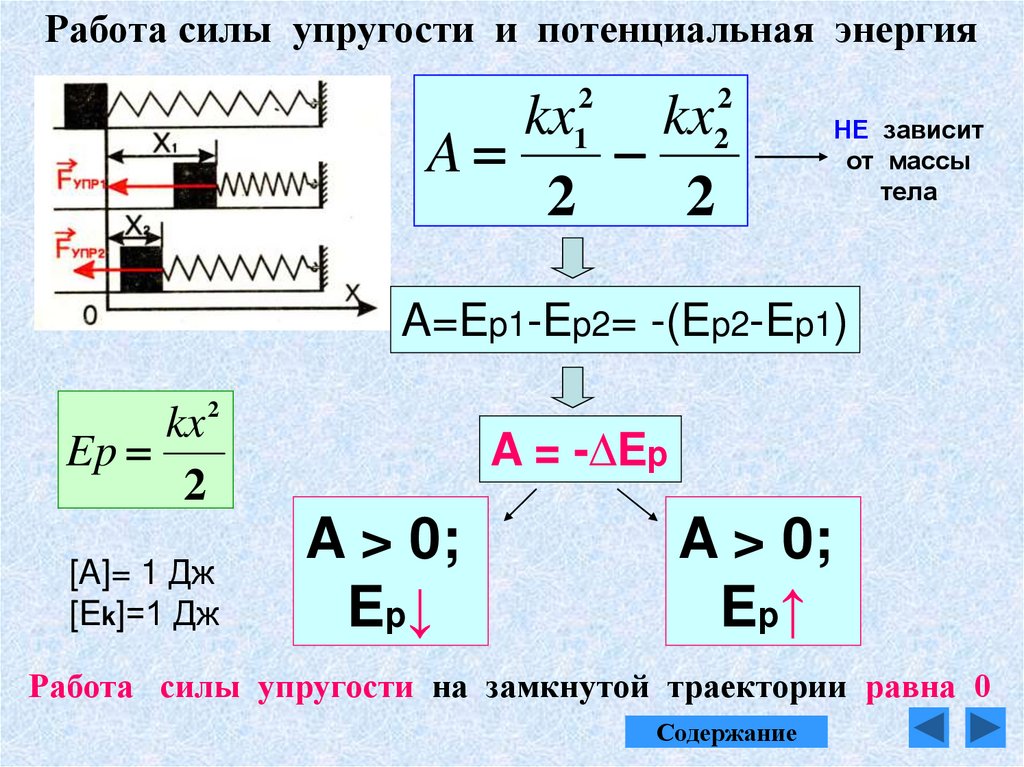
Работа силы упругости и потенциальная энергия2
1
2
2
kx
kx
A
2
2
НЕ зависит
от массы
тела
A=Ep1-Ep2= -(Ep2-Ep1)
kx 2
Ep
2
[A]= 1 Дж
[Ek]=1 Дж
A = -∆Ep
A > 0;
Ep↓
A > 0;
Ep↑
Работа силы упругости на замкнутой траектории равна 0
Содержание
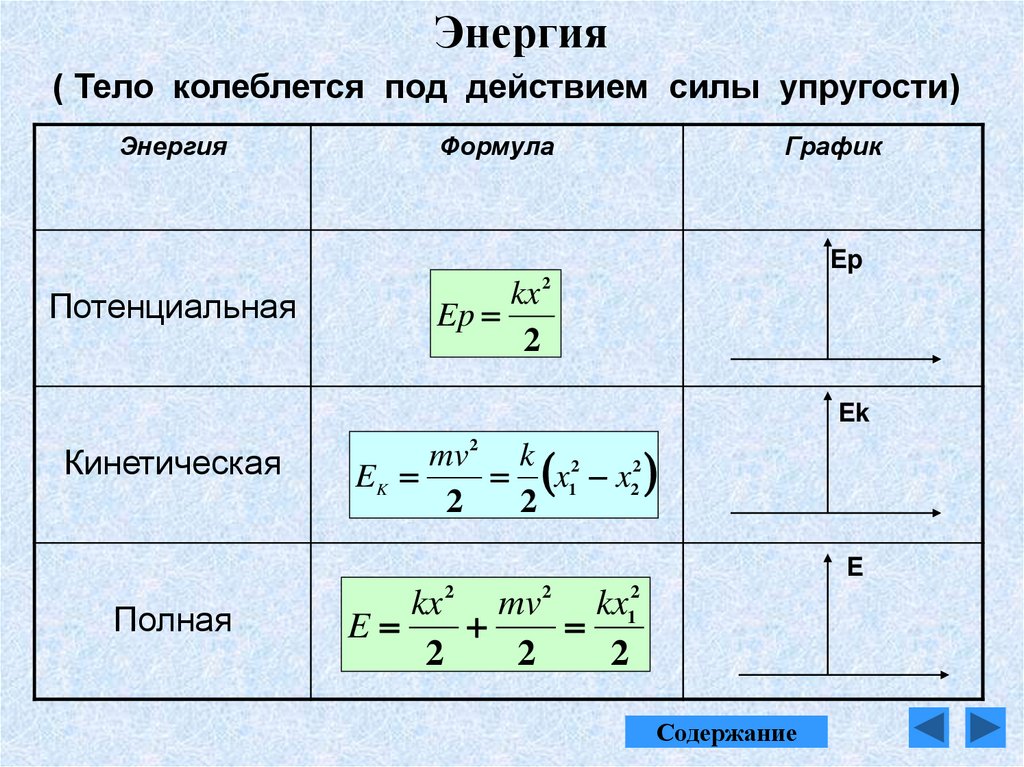
58.
Энергия( Тело колеблется под действием силы упругости)
Энергия
Формула
График
Ep
Потенциальная
kx
Ep
2
2
Ek
Кинетическая
mv2 k 2
EK
x1 x22
2
2
E
Полная
kx 2 mv2 kx12
E
2
2
2
Содержание
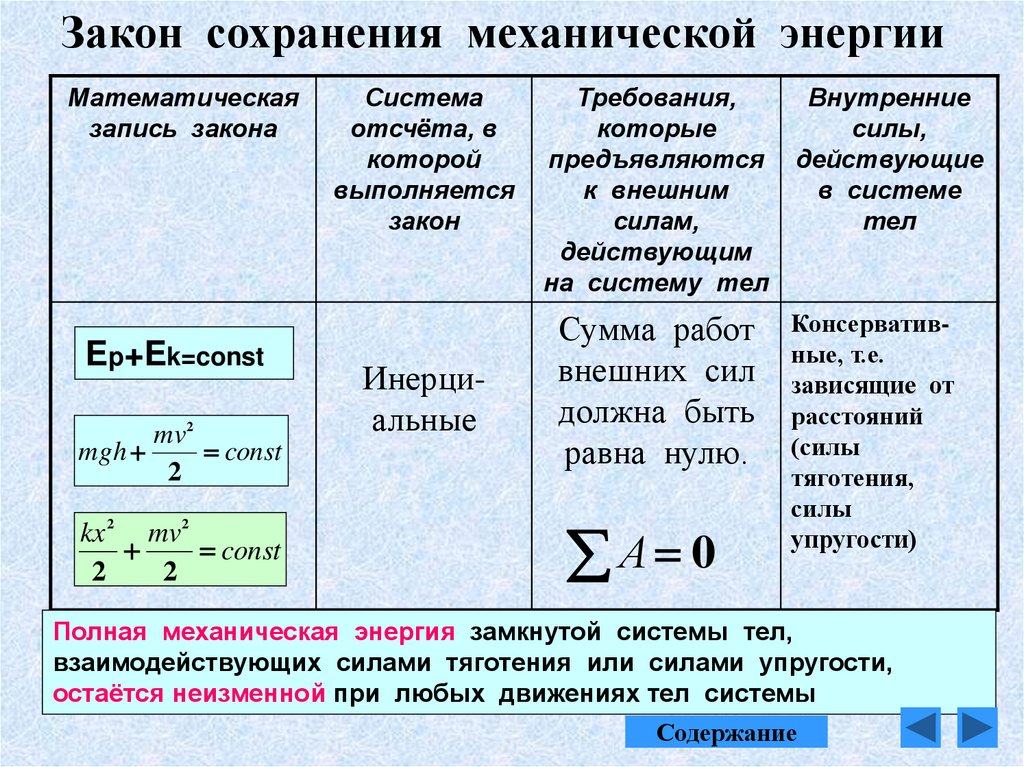
59.
Закон сохранения механической энергииМатематическая
запись закона
Ep+Ek=const
mv2
mgh
const
2
kx 2 mv2
const
2
2
Система
отсчёта, в
которой
выполняется
закон
Инерциальные
Требования,
которые
предъявляются
к внешним
силам,
действующим
на систему тел
Внутренние
силы,
действующие
в системе
тел
Сумма работ
внешних сил
должна быть
равна нулю.
Консервативные, т.е.
зависящие от
расстояний
(силы
тяготения,
силы
упругости)
А 0
Полная механическая энергия замкнутой системы тел,
взаимодействующих силами тяготения или силами упругости,
остаётся неизменной при любых движениях тел системы
Содержание
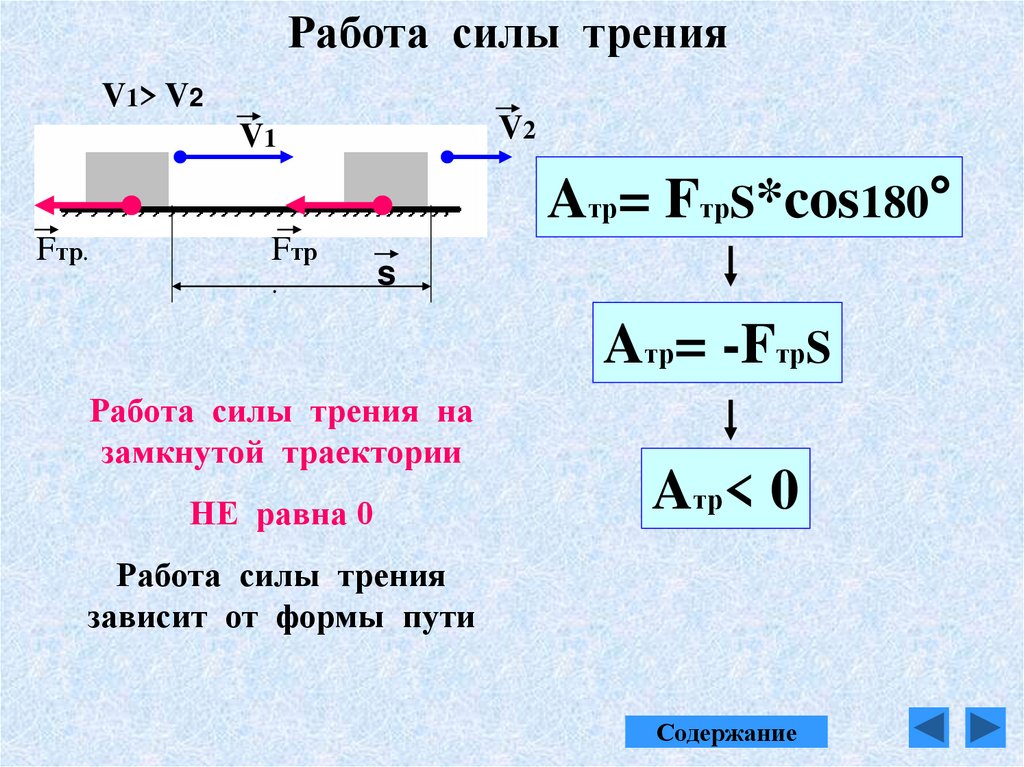
60.
Работа силы тренияV1> V2
V2
V1
Aтр= FтрS*cos180°
Fтр.
Fтр
.
s
Aтр= -FтрS
Работа силы трения на
замкнутой траектории
НЕ равна 0
Aтр< 0
Работа силы трения
зависит от формы пути
Содержание
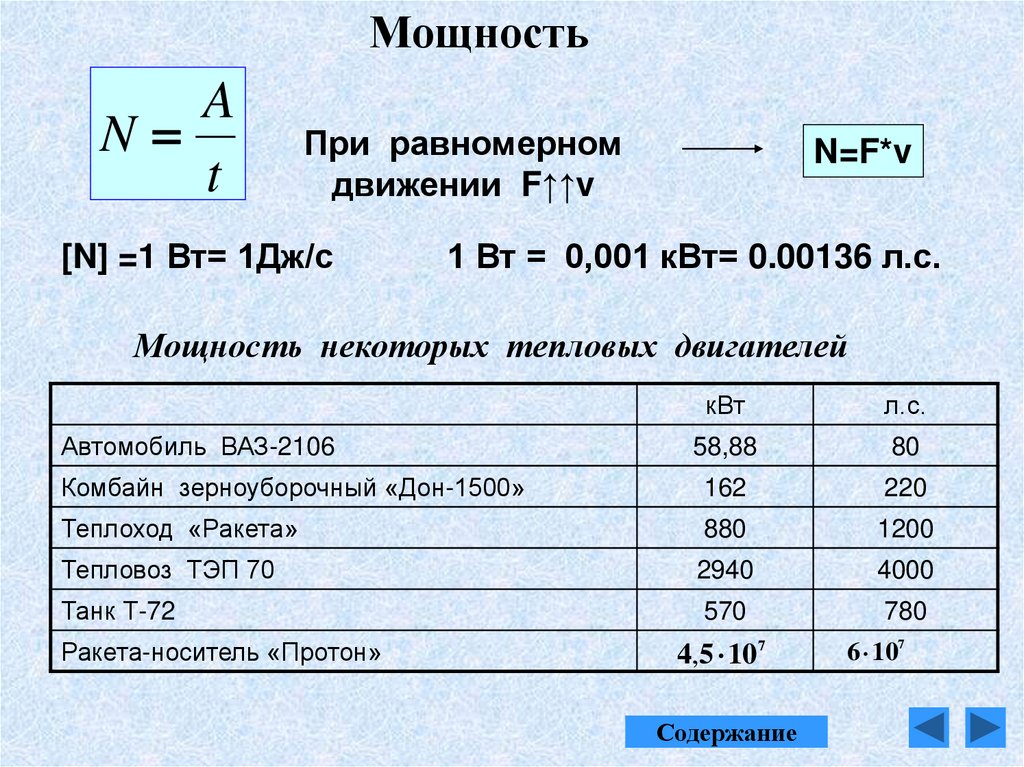
61.
МощностьA
N
t
При равномерном
движении F↑↑v
[N] =1 Вт= 1Дж/с
N=F*v
1 Вт = 0,001 кВт= 0.00136 л.с.
Мощность некоторых тепловых двигателей
кВт
л.с.
Автомобиль ВАЗ-2106
58,88
80
Комбайн зерноуборочный «Дон-1500»
162
220
Теплоход «Ракета»
880
1200
Тепловоз ТЭП 70
2940
4000
Танк Т-72
570
780
Ракета-носитель «Протон»
4,5 107
Содержание
6 107
62.
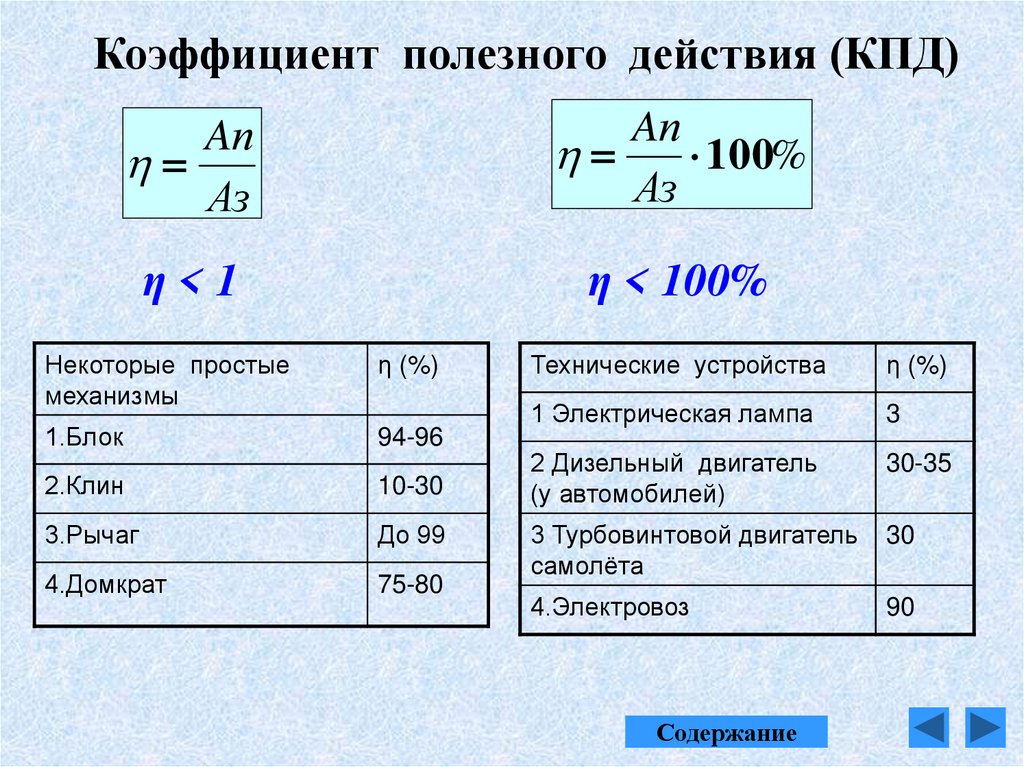
Коэффициент полезного действия (КПД)Aп
Аз
Aп
100%
Аз
η<1
η < 100%
Некоторые простые
механизмы
η (%)
1.Блок
94-96
2.Клин
10-30
3.Рычаг
До 99
4.Домкрат
75-80
Технические устройства
η (%)
1 Электрическая лампа
3
2 Дизельный двигатель
(у автомобилей)
30-35
3 Турбовинтовой двигатель
самолёта
30
4.Электровоз
90
Содержание
63.
Колебания тела на пружинеВеличина
1.
2.
3.
4.
5.
6.
7.
8.
Обозна
-чение
Координата
Амплитуда
колебаний
Частота
Период
Угловая
частота
Фаза
Начальная
фаза
Жесткость
X
Xm (A)
Содержание
Едини
цы
64.
Колебания тела на пружинеСодержание
65.
Колебания тела на пружинеСодержание
66.
Математический маятник67.
Математический маятник68.
Математический маятникСодержание
69.
Гармонические колебанияСодержание
70.
Виды колебанийСодержание
71.
Механические колебания (звук)Содержание
72.
Диапазоны слышимых звуковСодержание
73.
Используемая литература1. Рассказова Г.А. « Физика. 9 класс». (В таблицах и схемах).
«Издат-школа», Москва, 1997 г.
2. Кикоин «Физика. 9 класс».
Москва. Просвещение, 1998 г.
Содержание